
基于磁标记的智能汽车实时航向估计方法
2017-02-17 04:00YeunSubByun,张志阳
汽车文摘 2017年1期
基于磁标记的智能汽车实时航向估计方法
针对全轮转向单铰式自动驾驶汽车,提出了一种新的基于磁标记系统的实时航向估计方法。为了实现良好的汽车导向控制,需要精确估计汽车行驶过程中的位置和航向角。研究主要从磁标记和车辆运动的相对方位来估计航向角。
提出的磁标记系统包括3根安装在车轴附近的磁尺和掩埋在路上的磁标记,所有磁标记的位置和极性信息已经提前测量并已知。车辆在路上行驶时,磁传感器在每个采样期间检测磁尺和磁标记的相对距离(图1~图3),系统利用该数据信息便可估计出车辆的航向角。具体方法是:根据推导的全轮转向车辆的运动学模型,结合连续检测到的两个路面磁标记的位置坐标和极性信息来估计车辆的航向角。当缺少磁标记检测数据时,在每个采样期间采用陀螺仪来辅助实时航向估计。

图1 试验车上传感器的安装

图2 磁尺在车底的安装位置
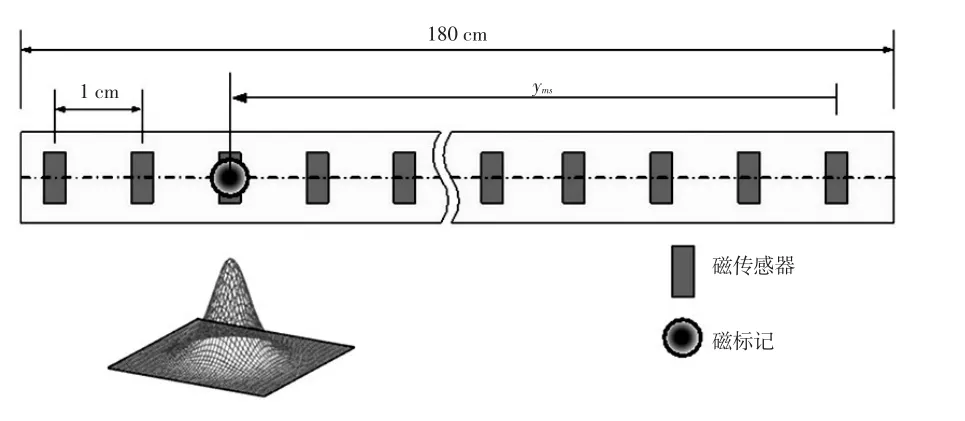
图3 磁尺结构(yms=0):磁传感器测量原点
通过实车测试并与实时运动模式下的GPS数据进行了比较。实车测试结果表明,所提出的方法尽管不能避免车辆行驶过程中由于滑转造成的测量误差,但由于车辆航向角可单独计算,且当航向角已知时,车辆的坐标位置可根据检测到的磁标记位置和几何方法来确定,因此位置测量误差可减小到两个磁标记安装间隙这一范围内。因而,这种基于磁标记的航向估计系统具有良好的准确性和可靠性。
刊名:Journal of Dynamic Systems,Measurement and Control(英)
刊期:2016年第7期
作者:Yeun Sub Byun et al
编译:张志阳
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
红领巾·萌芽(2022年3期)2022-03-13
科技与创新(2021年24期)2022-01-03
内燃机与配件(2021年11期)2021-09-10
内燃机与配件(2020年20期)2020-09-10
民用飞机设计与研究(2019年4期)2019-05-21
汽车与运动(2017年11期)2018-05-22
物联网技术(2016年12期)2017-01-21
