
无人救捞艇的航向控制器设计*
2022-01-03 16:58蔡寿国赵启壮姚子豪仇季瑾
科技与创新 2021年24期
罗 哲,王 宁,蔡寿国,赵启壮,姚子豪,仇季瑾
(南通大学电气工程学院,江苏 南通 226001)
救捞无人艇的航向控制,是保证其能够迅速到达救援区域实现成功救捞的基础性功能。其一般由跟踪航向和航向保持两部分构成。航向跟踪要求无人艇的实际航向ψ逐渐变得和设定航向角ψr一样。航向保持则是要求舵角δ要克服各种干扰将实际的航向角ψ牢牢地稳定在设定航向ψr上。航向控制通常采取闭环控制[1],通过实际航向ψ与设定航向ψr比较,形成航向误差信息△ψ=ψr-ψ,经过航向控制算法给出命令舵角δr,控制船头朝减少航向偏差的方向转动。
1 无人艇航向PID控制器设计
本文中,为简化分析无人艇模型采用Nomoto模型:
通常利用单纯的PD控制器,就可以实现航向控制,但是考虑水上航行时船舶遭遇波浪的干扰,导致产生稳态误差。因此,需要对PD控制律中添加积分项来进行补偿[2]。取控制律如下:

将其代入到Nomoto模型中,获得系统闭环特征方程:

其中KP、KD、KI的取值只要保证上式的特征根实部均小于0即可。求得。其中ωn为系统自然频率,ξ为阻尼比。需要说明的是这并非参数整定完毕,需要对其调整确定最终控制器参数。
2 航向控制器得Matlab仿真
利用Simulink构造的无人艇航向控制器如图1所示。
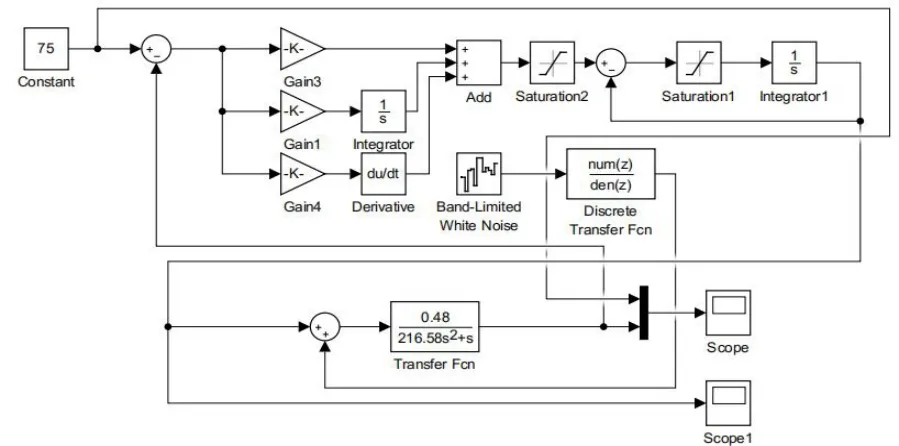
图1 无人艇仿真Simulink模型
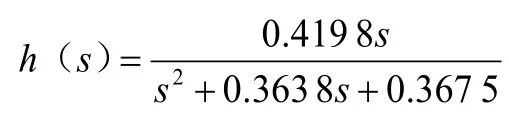
首先是航向角参考输入设定;然后就是设计的PID控制器,三个增益则分别表示所需要的参数值;PID控制器输出送入舵角模型,在该部分设计有两个限幅器,分别用于模拟船舵的左右最大幅值和舵的转速限制;最后一部分则是无人艇的Nomoto模型。系统模型采用。在仿真中用为模拟船舶在运行过程中遇到的风浪干扰,采用白噪声驱动一个二阶振荡环节。在六级风的作用下得到海浪模型传递函数为[3]:
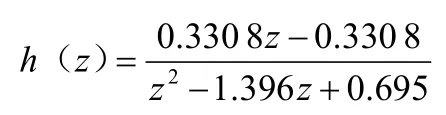
将其进行离散化,取采样时间设为1 s,白噪声强度设为1 000,得到其离散模型:
3 仿真结果分析及结论
仿真时,设定参考航向角为75°,考虑波浪的影响,得到的仿真曲线如图2和图3所示。
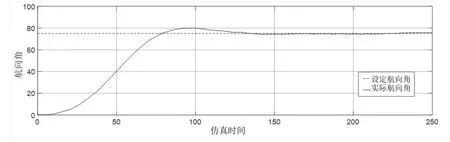
图2 航向角变化曲线
从图2、图3可以看出,在加入了干扰信号后,无人艇仍然能够按照指定的航向角前进,虽然在图中看到仿真中后期,实际航向角略微有些波动,但是无人艇始终并没有脱离预定的航向,并且相对于无波浪干扰工况,在刚开始的阶段,无人艇的舵角始终在按照它的最大变化速率进行改变,但在维持了一段时间后,就开始进行回舵;在受到波浪干扰后,它的变化速率就开始发生波动,用来抵抗海浪的干扰,保证无人艇按照预定的方向航行。
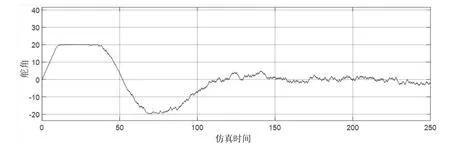
图3 舵角变化曲线
通过仿真曲线分析,可以看到控制器可以较快地跟踪设定的航向,并且在波浪干扰的影响下,仍然能够比较准确地维持航向,具有较优良的性能。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年11期)2022-07-15
中国自行车(2022年3期)2022-06-30
学苑创造·A版(2022年4期)2022-06-18
舰船科学技术(2022年10期)2022-06-17
阅读与作文(小学高年级版)(2020年3期)2020-03-02
当代陕西(2020年24期)2020-02-01
当代陕西(2019年17期)2019-10-08
网络空间安全(2019年8期)2019-03-18
师道(2018年6期)2018-07-16
