运输机装载规划视景仿真技术的研究
2017-02-17 03:06邱枫杨臻韩晓明高碧祥
火力与指挥控制 2017年1期
邱枫,杨臻,韩晓明,高碧祥
(中北大学机电工程学院,太原030051)
运输机装载规划视景仿真技术的研究
邱枫,杨臻,韩晓明,高碧祥
(中北大学机电工程学院,太原030051)
以运输机装载规划过程为仿真对象,建立简化数学模型,然后结合Unity3D引擎,运用视景仿真技术相关知识,把运输机装载规划全过程、运输机装载过程中质心变化等进行实时显示。运用视景仿真技术进行运输机装载规划,可对真实装载规划过程起到重要的引导作用,并且能够有效缩短运输机装载规划周期,提高运输机装载效率。
运输机装载规划,视景仿真,重心,Unity3D
0 引言
随着航空运输的快速发展以及运送物资的多样化,对运输机装载规划也提出了更高的要求。目前,国内运输机装载规划主要采用人工规划方式,即首先通过数学计算,求出装备在运输过程中的初步位置,然后根据实际情况进行调节,以保证装载完成后的整个运输机的飞行稳定性和安全性[1]。因此,现有的运输机装载规划方式已不能满足当前运输机快速机动要求。
视景仿真技术是现在较为成熟的一项计算机技术,它综合了传统的计算机图形学和代码编程学,实现人与虚拟环境的交互,给予操作者较为真实的体验[2]。通过建立数学模型,可实现真实场景的模拟,从而有效缩短产品研发周期,提高研制效率,视景仿真技术现已广泛用于航空、航天领域[3]。
本文提出一种结合视景仿真技术的运输机装载规划技术,首先将运输机装载规划过程进行简化,然后编写装载规划程序,最终实现运输机整个装载过程的三维实时显示。
1 系统总体设计
1.1 系统功能
建立装备三维模型,对装备的尺寸、质量、质心位置、系留点位置等参数进行定义,结合装备真实的运动特性,赋予装备相应性能。装载过程中,三维实时显示装备装载过程和运输机质心位置的变化。
1.2 系统组成
运输机装载规划视景仿真系统主要由装备数据库和视景仿真系统组成,视景仿真系统包含三维模型、数学模型和仿真程序3部分。运输机装载规划视景仿真系统组成图如图1所示。
2 数学模型
2.1 质心计算函数
装备在运输机货舱内进行运动时会导致运输机质心的偏移,该过程产生的质心变化会对运输机的飞行稳定性产生很大影响[4]。根据两质点系质心计算公式推导,世界坐标系下空间任意两质点系质心公式:
设点X0(X0,Y0,Z0)质量为M0,点X1(X1,Y1,Z1)质量为M1,组成的质量系总质心为Xn(Xn,Yn,Zn),可求得Xn(Xn,Yn,Zn)坐标如下:
上述公式可求得两质点系质心位置,该式可推广到多质点系质心公式的推导。同时由于装载过程中整个系统动量守恒[5],故装备质量为M1的装备,运动位移为L时,质量为M0的运输机运动位移L'为:
设运输机质量为140 T[6],则装载不同装备时运输机质心水平运动位移汇总表如表1所示(忽略运输机加载后运输机质心垂直方向的位移)。

表1运输机装载不同装备时运输机质心水平运动位移
综上所述,装载过程后,修正后的运输机质心变化函数为:
2.2 四元数与欧拉角坐标转换
装载过程中,装备运动姿态调整可通过调用U-nity3D引擎中自带的四元数模块与欧拉角模块进行实现。按国际标准,设坐标系Sa和Sb是以欧拉角ψ,θ,φ按如下方式联系[7]:
则相应的公式为
以及在小角度时的近似关系式
综上所述,用程序进行装备姿态转换函数的编写,即可实现装备运动过程中的姿态调整。
3 系统实现
运输机装载、规划视景仿真系统流程图如图2所示。
通过调用Unity3D自带的物理引擎,可有效减少编程量,为保证仿真参数与实际参数相符,因此,需对相关参数进行简化计算,例如车体悬挂系统刚度、阻尼、悬挂行程等参数[8]。典型装备参数及对应变量汇总表如表2所示。
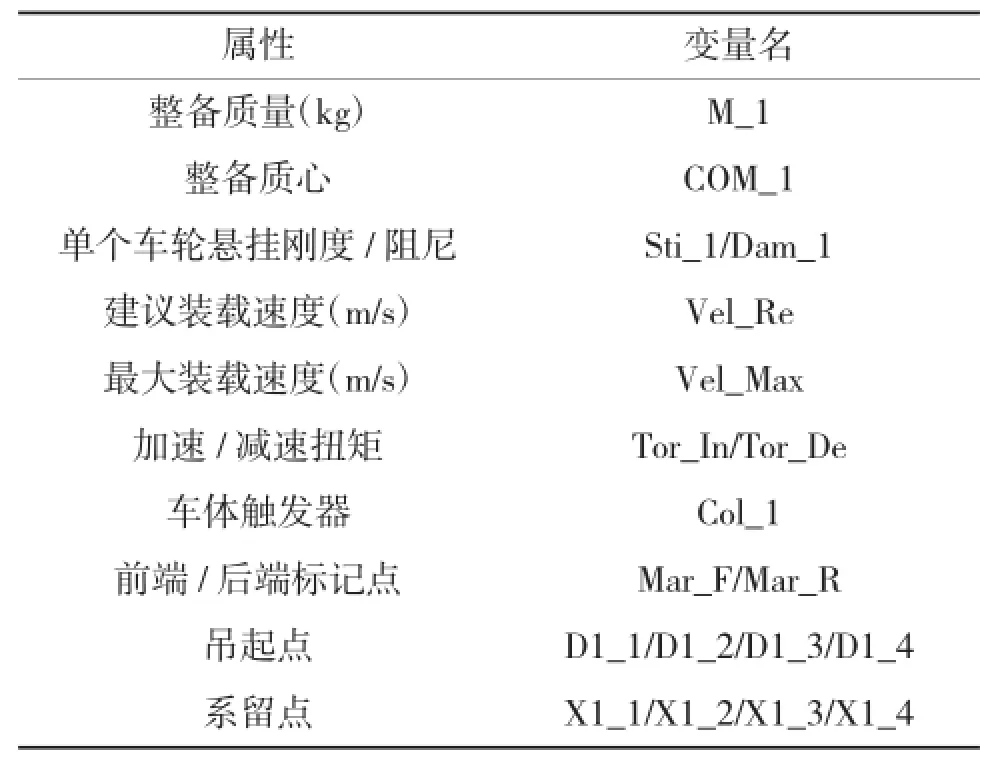
表2 典型装备参数及其对应变量汇总表
3.1 装载过程的实现
装载过程除需要装备参数外,还需要运输机相关性能参数,装载过程所需部分参数汇总如表3所示。

表3 装载过程所需部分参数汇总表
通过改变车轮在离标记点不同距离下的输出扭矩,使得装备运动速度发生改变,最终实现整个装备的装载过程。装载过程流程图如图3所示。
3.2 触发系留动作的实现
装载过程中,机构动作主要是通过调用各类触发器和附加程序实现,Unity3D提供了多种触发器。Unity3D引擎中有盒触发器(Box Collider),球触发器(Sphere Collider),胶囊触发器(Capsule Collider)网格触发器(Mesh Collider),车轮触发器(Wheel Collider)5种类型的触发器[9]。
由于装备外形尺寸较为复杂,最初选用网格触发器(Mesh Collider),但是实际运行中发现,网格触发器(Mesh Collider)不仅占用大量内存,并且在某些部位还会出现穿插的现象,不符合仿真要求。综合比较后,改用多个盒触发器(Box Collider),这样不仅运行可靠,效率更高,而且也能够达到较好的仿真效果。触发器触发比用时间控制程序更为可靠,同时还可使得装载过程中装备的运动状态更加真实。
通过判定装备触发器是否进入运输机触发器,从而激活系留动作程序。盒触发器触发系留程序流程图如图4所示。
3.3 相机程序控制
装载过程中,需在多个位置添加观察视角。其中,装备跟踪相机需跟随装备运动,由于装备在装载过程中会发生晃动,为了达到较为合理的视觉效果,因此,需要对相机跟随装备的运动过程进行程序控制。相机程序定义变量汇总表如表4所示。

表4 定义变量及其对应名称汇总表
其中currentRotationAngle与wantedRotationAngle之间用LerpAngle函数进行差值,刷新率为rotationDamping*Time.deltaTime。通过Quaternion.Euler(0,currentRotationAngle,0)将currentRotationAngle的Y向分量定义给currentRotation。通过currentRotation*Vector3.forward*distance实现currenHeight与currentRotation的关联。
通过对相机进行程序设定,可使得相机跟随目标时更为平稳,符合真实视觉效果。
3.4 仿真系统实现与优化
运输机装载规划视景仿真系统界面如图5所示,装备装载三维视景仿真过程截图如图6所示。
运输机装载规划视景仿真系统在运行过程中,由于参数设定不合理会导致整个仿真过程卡顿,甚至出现程序崩溃的情况,经反复调试可得,出现该现象主要是由于装备模型占用较大计算机内存导致。
装备1:1三维模型的制作是一个工作量较大,且需不断优化的过程,由于仿真系统需在真实和虚拟中达到一个均衡,因此,需要对装备模型的多边形面数进行优化[10]。结合仿真系统实际运行情况,在装备模型总面数为10 W时,8 G内存占用率为87 %,在装备模型面数总为1W时,8G内存占用率为21 %,可见,装备模型优化对于整个仿真系统的可靠性有着较大影响。装备建议多边形面数如表5所示。

表5 装备建议多边形面数统计
4 结论
本文首先结合运输机实际装载情况,建立简化数学模型,然后通过Unity3D引擎将该装载过程实时渲染输出,在给人以强烈的视觉效果之外,还对装备真实装载起到有效的引导作用,这极大地提高了运输机装载效率,能够有效缩短装载周期。
随着计算机技术的不断发展,计算机视景仿真将能够更为真实、快速地进行仿真分析,这与传统靠复杂理论计算进行仿真模拟相比,更符合目前要求高效率、保质量的工作场合。
[1]刘宁君,王立新,潘文俊.运输机群货物装载方案生成方法[J].北京航空航天大学学报,2013,39(6):751-755.
[2]高颖,黄罗军,许志国,等.基于OpenGL某导弹视景仿真技术研究[J].兵工学报,2007,28(1):125-128.
[3]丁斌,祖家奎.基于虚拟现实的无人机可视化仿真[J].计算机测量与控制,2007,15(12):1769-1771.
[4]中国航空工业总公司.货运飞机专用技术设计指南[M].北京:航空工业出版社,1996.
[5]KALUZNY B L,DAVID S R H A.Optimal aircraft load balancing[J].International Transactions in Operational Research,2009,16(6):767-787.
[6]MONGEAU M,Bès C.Optimization of aircraft container loading[J].IEEE Transactions on Aerospace and Electronic Systems,2003,39(1):140-150.
[7]张有济.战术导弹飞行力学设计(上)[M].北京:宇航出版社,1996.
[8]郭玺,薛青,颜国明,等.视景仿真中车辆在不同路面上运动状态的研究[J].系统仿真学报,2006,18(8):201-205.
[9]王洪源,陈慕羿,华宇宁,等.Unity3D人工智能编程精粹[M].北京:清华大学出版社,2014.
[10]DUNN F.3D数学基础:图形与游戏开发[M].北京:清华大学出版社,2014.
Study in Transport Aircraft Cargo Loading Plans with Visual Simulation Technology
QIU Feng,YANG Zhen,HAN Xiao-ming,GAO Bi-xiang
(School of Mechatronic Engineering,North University of China,Taiyuan 030051,China)
To transport aircraft cargo loading planning process as the simulation object,the simplified mathematical model is established,then Unity3D engine is combined with and visual simulation technology is used,and displaying the whole process of transport aircraft cargo loading and the changes of center of gravity in real-time.The use of visual simulation technology in transport aircraft cargo loading planning can play an important guiding roles in reality,and can shorten the transport load planning cycles and improve the transport aircraft cargo loading process effectively.
transport aircraft cargo loading planing,visual simulation technology,center of gravity,Unity3D
TP391.9
A
1002-0640(2017)01-0117-04
2015-10-08
2016-01-15
邱枫(1991-),男,四川泸州人,硕士研究生。研究方向:机械结构仿真、视景技术。
猜你喜欢
科技资讯(2022年12期)2022-07-17
电脑知识与技术(2022年11期)2022-05-31
计算机仿真(2022年1期)2022-03-01
电脑爱好者(2021年6期)2021-03-24
民用飞机设计与研究(2020年4期)2021-01-21
火力与指挥控制(2020年2期)2020-04-02
劳动保护(2019年3期)2019-05-16
电脑知识与技术(2018年22期)2018-11-26
电脑知识与技术(2016年1期)2016-03-22
科技视界(2016年25期)2016-03-10