高低不平顺动静态关系的一种分析方法
2017-03-09 07:10李凤煜许玉德李海峰邱俊兴
华东交通大学学报 2017年1期
李凤煜,丁 荣,许玉德,李海峰,3,邱俊兴
(1.同济大学道路与交通工程教育部重点实验室,上海 201804;2.上海铁路局上海铁路轨道交通开发有限公司工程分公司,上海200071;3.同济大学浙江学院交通运输工程系,浙江 嘉兴314051)
高低不平顺动静态关系的一种分析方法
李凤煜1,丁 荣2,许玉德1,李海峰1,3,邱俊兴1
(1.同济大学道路与交通工程教育部重点实验室,上海 201804;2.上海铁路局上海铁路轨道交通开发有限公司工程分公司,上海200071;3.同济大学浙江学院交通运输工程系,浙江 嘉兴314051)
轨道不平顺的检测通常可分为静态检测与动态检测2种类型。根据现场经验,动静态检测值之间往往存在一定的偏差。针对轨道不平顺中的高低不平顺,提出一种分析其动静态关系的方法,该方法首先建立一个动静态关系的计算模型,然后通过编程将其实现,最后结合现场实验数据对方法的适用性进行分析。分析表明,该方法能够在一定程度上较好地由动态不平顺原波形推算静态不平顺的原波形,但当实际静态不平顺波形在波峰处偶尔超过或明显低于动态不平顺波形时,则有可能无法被准确还原;因此具有一定的局限性。
有砟轨道;高低不平顺;动静态关系;现场实验
轨道几何不平顺是指轨道各部分的几何形状、基本尺寸和空间位置相对其正常状态的偏差,较大幅值的轨道不平顺会影响行车安全性和旅客舒适度。目前,轨道几何不平顺的检测方法大致可分为2种类型:一是利用轨道检查仪(手推式轨检小车)进行轨道静态检测,二是利用高速轨检车(综合检测车)进行轨道动态检测。
根据现场经验,轨道不平顺的动态值往往与现场静态检测值存在一定的偏差[1-4]。对于轨道不平顺的动静态关系,日本学者家田仁等[5]对采用不同测量方法得到的轨道高低不平顺检测值之间的相互关系进行了分析。山脇浩等[6]则尝试采用有限元方法进行研究,并建立了动静态关系的有限元计算模型,但是在采用有限元方法进行计算时,对于循环次数的判断方面并不是很明确,同时算法复杂,计算效率低。国内学者与研究人员,则基本停留在对现场实测的轨道不平顺动、静态检测波形的统计分析或不平顺谱分析等方面上,并未对两者的关系建立理论计算模型[7-9]。
因此,针对轨道高低不平顺的动静态关系,提出一种动静态关系的分析方法,首先建立一个动静态关系的计算模型,然后通过编程将其实现,最后结合现场数据对方法的适用情况进行分析。本文与文献 [6]采用相同的假设,但在算法方面进行了改进,采用基本材料力学迭代进行计算,故与原方法相比,本文所提出方法的计算原理更加清晰易懂,算法相对简单,计算效率高。
1 动静态关系计算模型
1.1 模型建立
研究轨道高低不平顺的动静态关系,可以从2种思路来考虑,第一种是在已知轨道静态不平顺的情况下,考虑高速轨检车的移动荷载作用,推算轨道的动态不平顺;第二种是在已知轨道动态不平顺的情况下,反算轨道的静态不平顺。
结合相关文献的结论,可以认为在导致轨道高低不平顺动静态检测值产生差异的原因中,由于“轨枕吊空”所产生的影响更为重要。如图1所示,动态检测时,在高速轨检车的列车荷载作用下,轨枕与道床面间原本存在空隙的位置不再有空隙,导致此处动态不平顺波形与静态不平顺波形产生差异。而第二种分析思路主要考虑了该因素的影响作用;因此,本文采用已知轨道动态不平顺,反算轨道静态不平顺的思路,建立分析计算模型。
轨道高低不平顺状况的模型如图2所示。将钢轨按照弹性支撑连续梁来考虑,轨枕、道床视为弹性支座,建立基本结构。其中,梁CD表示无荷载作用时的原波形,与动态不平顺原波形相交于X1,X2两点,AB表示由轨枕、道床等组成的弹性支座;对于梁CD上的任一点ki,其静态不平顺原波形为SS(i),动态不平顺原波形为SD(i)。假设当梁CD位于动态不平顺原波形上方时,轨道处于“轨枕吊空”状态,其垂向弹性支座的弹性模量非常小,允许这些位置发生变形;而当梁CD与动态不平顺原波形相交时,轨道不处于“轨枕吊空”状态,其垂向弹性支座的弹性模量非常大,使得这些位置不再发生变形。
根据上述假定,在初始状态下,梁CD与动态不平顺原波形相交于X1,X2两点,故此时垂向弹性支座的弹性模量在X1,X2两点处极大,而在X1,X2两点以外的部分极小。假设梁CD的自重分布均匀,即梁CD上的任一点ki的质量相同,逐渐对梁CD施加荷载,从而梁CD会随之逐渐向下变形,当梁CD上任意点与动态原波形相交时,便将此点的垂向弹性支座的弹性模量取一个极大值,接着继续施加荷载,依此规则对梁CD的变形进行重复计算,直至施加的荷载达到其自重P0,此时即可得到静态不平顺的原波形。
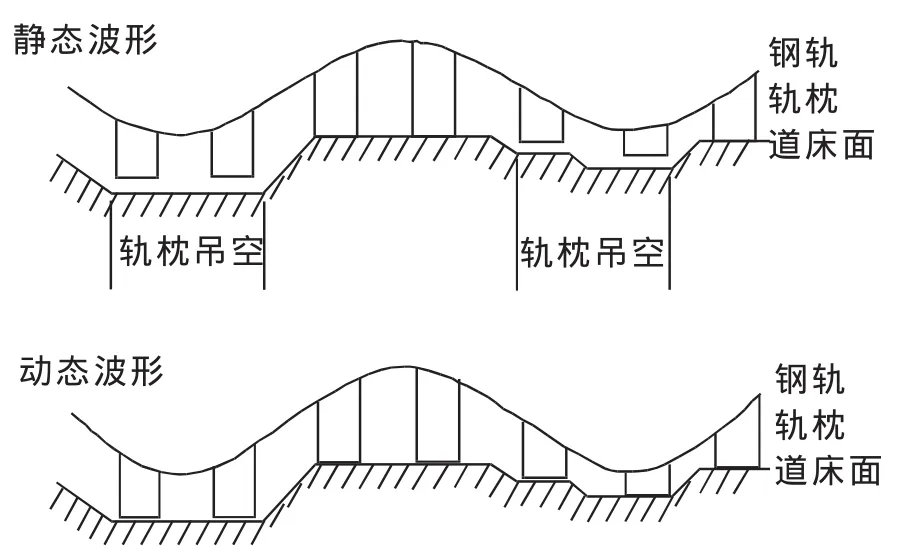
图1 “轨枕吊空”现象Fig.1 “Sleeper hanging empty”phenomenon
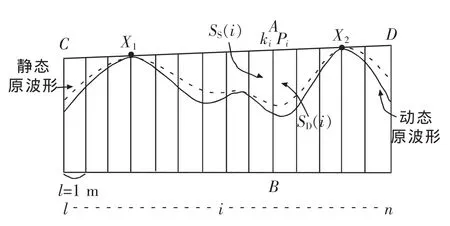
图2 动静态不平顺模型示意图Fig.2 Diagrammatic sketch of static and dynamic irregularity model
1.2 计算流程
将1.1节中建立的轨道高低不平顺动静态关系计算模型的计算过程归纳整理为计算流程图,如图3所示。
以下对计算流程中的主要计算步骤与计算方法做详细说明。
1)基本条件的输入与基本结构的设定。基本条件的输入主要包括钢轨的基本参数(质量、密度、截面积、惯性矩、弹性模量等),轨枕的类型及其基本参数(几何尺寸、质量、密度等)。依照现场实际情况进行输入,建立如图2所示的基本结构模型。
2)计算区间的长度与动态原波形的输入。考虑到实际运算的时间和效率,将一次计算对象的区间长度取为50 m,同时考虑到模型是对原本无限长梁进行了有限长梁的近似计算,故将计算结果中头尾两端的10 m去除,在50 m的计算区间长度内保留中部30 m作为有效的计算结果。
在进行动态原波形输入前,必须注意到轨道不平顺动态检测波形的里程偏移问题[10-11],对动态原波形进行里程偏移修正、异常点去除等预处理工作,以保证计算结果的可靠性与准确性。
3)交点X1与X2以及无荷载作用时原波形的确定。交点X1与X2的确定应从计算区间范围内k1~kn中任意两点的所有组合情况中探索,考察是否满足通过这两点的直线,使得动态原波形的全域均在其下方,且直线上各点至动态原波形的距离和为最小。即
对∀i,有SD(i)≥0,且取到最小值。
其中,SD(i)为ki点处无荷载作用时原波形纵坐标值与动态原波形纵坐标值之差。
根据模型假定,无荷载作用时的原波形(即梁CD)与动态不平顺原波形相交于两点X1与X2。确定了这两个交点X1与X2的位置,其连线就可认为是无荷载作用时的原波形。
4)荷载增量的施加。为了方便计算,将每次循环重复计算时施加的荷载增量ΔP取相同值,又因为循环计算将在荷载达到自重P0时结束,故荷载增量ΔP可以表示为(1)式:

此处N为荷载增量重复施加的总次数。施加总次数N取值越大,则荷载增量ΔP取值越小,计算的精度也会随之提高,但由于循环计算次数增加,总计算时间也会延长,计算效率较低。反之,虽然总计算时间缩短,但计算的精度也会受到影响,存在一定程度的降低。故荷载增量ΔP的取值应根据实际输入的动态不平顺原波形的具体情况适当取值,确保施加总次数N既不过大,也不过小。这样才能够在保证一定的计算精度的同时,提高计算效率,缩短计算总时间。

图3 计算流程图Fig.3 Calculation flow chart
5)梁CD变形量的计算。将整个梁CD分为3个部分,头尾为一端固定梁(悬臂梁),中部为两端固定梁,如图4所示。根据材料力学理论,可以分别推导出一端固定梁与两端固定梁的挠度与转角的计算公式。
对于一端固定梁:

对于两端固定梁:


利用上述2种梁的挠度与转角公式,可以分段近似计算在荷载增量ΔP作用下,梁CD的变形量。
6)梁CD变形量计算的循环过程。在整个计算过程中,梁CD的分段方式会随荷载增量ΔP的逐渐重复施加而发生动态变化。根据图2中所建模型的基本假设,梁CD在发生变形后,在与动态不平顺原波形发生相交时,需将此点的垂向弹性支座的弹性模量取一个极大值,以限制此点继续发生变形。以下以一个示例来说明,梁CD变形量计算时的循环过程。
在计算的初始状态,梁CD与动态不平顺原波形相交于X1与X2两点,此时将梁CD划分为X1点以左的悬臂梁、X2点以右的悬臂梁、以及X1与X2两点间的两端固定梁3个部分,如图5(a)所示。开始计算过程后,对梁CD逐渐施加荷载增量ΔP,利用步骤(5)中的挠度、转角公式分段计算梁CD的变形量。
同时,继续对梁CD施加荷载增量ΔP,直至梁CD经过变形后的波形 (即静态不平顺的推算波形)与动态不平顺原波形发生再次相交,此时将交点处视为固定支座,将梁CD重新分段,在示意图中为:将原本X1与X2两点间的两端固定梁按新的交点重新划分为两段两端固定梁,如图5(b)所示。对重新分段后的梁CD继续施加荷载增量ΔP,并在每次静态不平顺的推算波形与动态不平顺原波形发生新的相交时,重复循环上述步骤,直至所施加的荷载达到梁CD的自重P0,此时即可得到静态不平顺原波形的推算结果,如图5(c)所示。
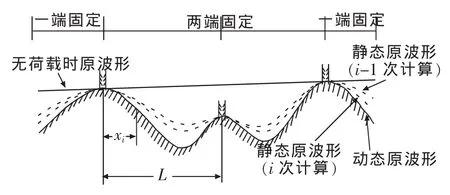
图4 梁CD变形量的计算Fig.4 Calculation of deformation of Beam CD
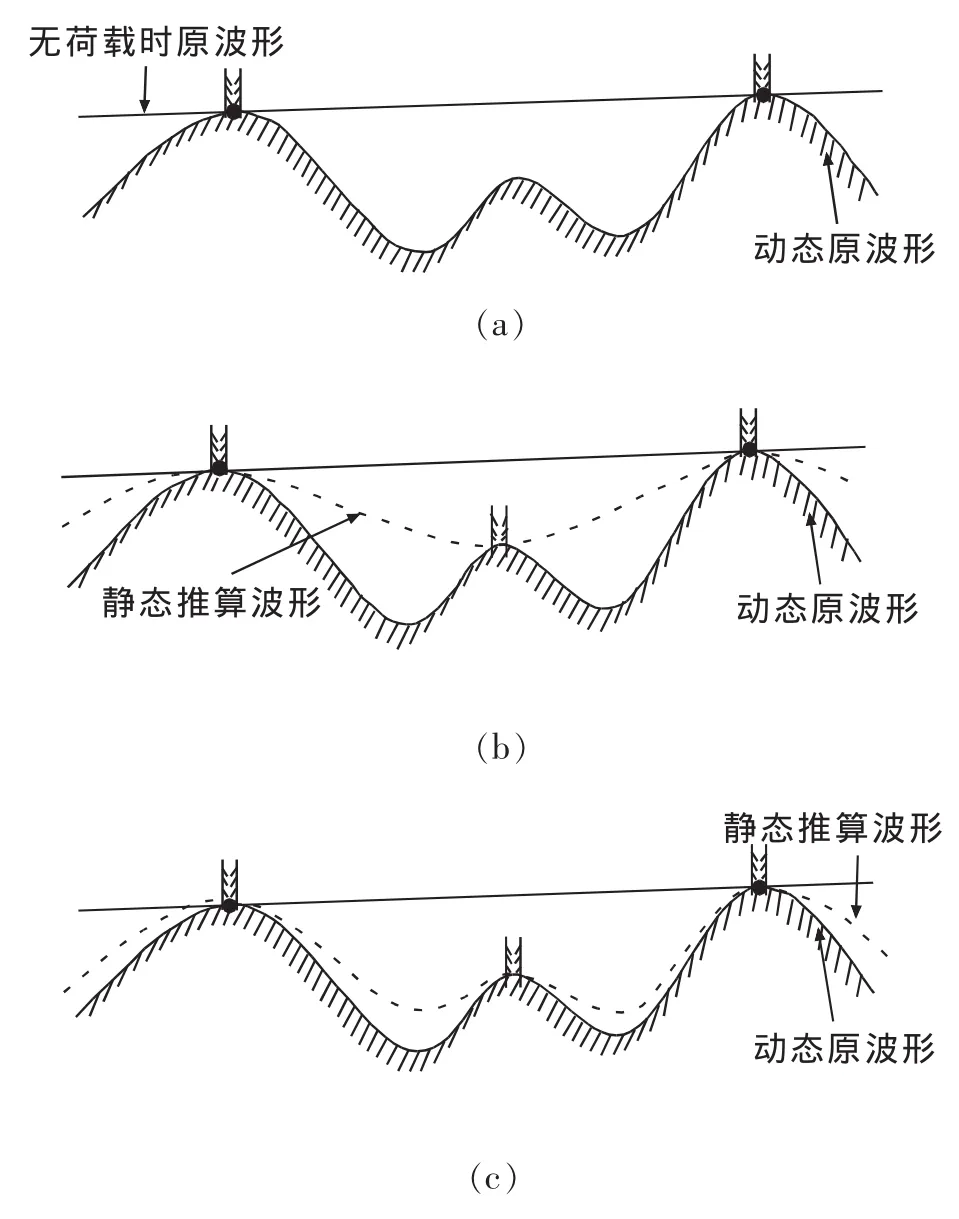
图5 循环过程示意图Fig.5 Diagrammatic sketch of cycle process
结合所建立的高低不平顺动静态关系计算模型及其计算流程,利用Matlab开发工具[13],编写轨道高低不平顺动静态关系的分析计算程序,从而实现相对快速、精确的计算过程与计算结果。
2 现场实验数据的动静态分析
为验证分析方法的适用性,以淮南线下行K28+876.47~K29+236.23曲线处由现场实验测得的轨道高低不平顺的静态检测数据以及相应时间段内由高速轨检车测得的轨道高低不平顺的动态检测数据为例,利用基于第1节中建立的模型编写的轨道高低不平顺动静态关系Matlab分析计算程序,对现场实验数据的动静态关系进行分析。截取其中一段较为典型的动态不平顺数据进行分析计算,计算结果如图6所示。
从图6中可见,推算静态不平顺波形与动态不平顺原波形的相对位置,符合计算模型的假定,在波峰处(图6中点9、点20附近)两波形相交,在波谷处(图6中点4、点14、点26附近)推算静态不平顺波形位于动态不平顺原波形的上方。进一步,观察推算静态不平顺与实际静态不平顺波形的还原程度,可见在点14、点26附近的波谷位置,推算静态不平顺波形与实际静态不平顺波形还原度非常高,其中在点26处的误差仅为0.09 mm,精度达到6.9%。但在点4附近的波谷位置处存在约0.33 mm的误差,由于实际静态不平顺波形均没有超过动态不平顺原波形,波峰处(图6中点9、点20附近)的还原情况也较好,其中在点20处的误差仅为0.08 mm,精度达到6.2%。计算动态不平顺、推算静态不平顺、实际静态不平顺的平均值与标准差,汇总于表1中。

图6 现场实验数据的动静态关系分析Fig.6 Analysis of the static and dynamic relationship based on the field experimental data

表1 动静态不平顺的平均值与标准差Tab.1 Average value and standard deviation of static and dynamic irregularity mm
由表1可见,动态不平顺的标准差为0.94 mm,推算静态不平顺的标准差为0.74 mm,实际静态不平顺的标准差为0.76 mm,推算静态不平顺的标准差与实际静态不平顺的标准差在数值上非常接近,仅相差0.02 mm,精度达到2.6%。
但若出现实际静态不平顺波形超过动态不平顺原波形的情况时,利用这种分析方法则可能无法准确地还原静态波形,其原因可从计算模型自身的角度进行分析:在如图2所示的动静态关系模型中,由于假定了当无荷载原波形(即梁CD)与动态原波形相交时,将此点的垂向弹性支座的弹性模量取一个极大值,在对梁CD逐渐施加荷载增量的过程中,根据图5的循环过程示例分析,在通常情况下,由该模型推算得到的静态不平顺波形在波峰位置附近均是与动态不平顺波形恰好相交的,故无法准确还原波峰位置,实际静态不平顺波形超过动态不平顺原波形的情况;又因为根据该模型的基本假定,推算的静态不平顺波形不会低于已知的动态不平顺原波形,故对于实际静态不平顺波形明显低于动态不平顺原波形的情况,也无法准确还原。这也正是该方法在已知动态不平顺原波形的情况下,反算静态不平顺原波形时的局限性所在。
由上述对计算结果的分析可见,本文所提出的轨道高低不平顺动静态关系分析方法能在一定程度上较好地推算静态不平顺的原波形,尤其是在波谷位置附近,静态波形的还原程度非常高,而对于实际静态不平顺波形没有超过动态不平顺原波形的情况,也能在波峰位置附近得到较好的还原效果。
3 结论
本文所提出的轨道高低不平顺动静态关系的分析方法,能够在一定程度上较好地以动态不平顺原波形推算静态不平顺的原波形,尤其在不平顺波形的波谷处对静态不平顺波形的还原程度非常好。但由于受到计算模型基本假定的限制,对于实际静态不平顺波形在波峰处偶尔超过动态不平顺波形,或者实际静态不平顺波形明显低于动态不平顺原波形的这2种情况,则有可能无法得到准确地还原;因此具有一定的局限性。
参考文献:
[1]任志强.无砟轨道不平顺静态值与轨检车160 km·h-1动态检测结果的相关性研究[J].铁道建筑,2012(4):125-127.
[2]邓学通.准高速轨检车和GJ-3轨检车动静态检测结果分析[J].铁道标准设计,2000(4):42-44.
[3]张未.线路动态与静态检查的数值差[J].铁道运营技术,1999(4):160-165.
[4]韩清强,武勇.轨道几何形位静态检查原理及应用[J].铁道标准设计,2005(8):105-108.
[5]家田仁,平田和敏,抱山洋之.異種測定方式による軌道狂い測定値の相互関係[J].鉄道線路,1986(6):274-279.
[6]山脇浩,家田仁.有限要素解析による動的及び静的狂いの相互関係[J].日本鉄道施設雑会誌,1987(3):223-237.
[7]李再帏,练松良,李秋玲,等.城市轨道交通轨道不平顺谱分析[J].华东交通大学学报,2011,28(5):83-87.
[8]徐伟昌,仲春艳,许玉德,等.高速铁路无砟轨道几何不平顺区段管理长度研究[J].华东交通大学学报,2016,33(2):9-14.
[9]毛晓君.杭长高速铁路钢轨预打磨对短波不平顺的影响[J].华东交通大学学报,2015,32(4):18-24.
[10]徐鹏.铁路轨检车检测数据里程偏差修正模型及轨道不平顺状态预测模型研究[D].北京:北京交通大学,2012.
[11]LI H F,XU Y D A.Method to correct the mileage error in railway track geometry data and its usage[C]//Traffic and Transportation Studies 2010,Kunming,China,2010:1130-1136.
Analysis on Static and Dynamic Relationship of Vertical Profile Irregularity
Li Fengyu1,Ding Rong2,Xu Yude1,Qiu Junxing1,Li Haifeng1,3
(1.Key Laboratory of Road and Traffic Engineering of the Ministry of Education,Tongji University,Shanghai 201804,China;2.Shanghai Railway Bureau,Shanghai 200071,China;3.Department of Transportation Engineering,Tongji Zhejiang Couege,Jiaxing 314051,China)
There are two types of track irregularity detection,namely static detection and dynamic detection.According to the field experience,there are some differences between the dynamic and static detection values.This paper proposes a method to analyze the static and dynamic relationship of vertical profile irregularity in track irregularity,which firstly establishes a calculation model of the static and dynamic relationship,then realizes it by programming,and finally analyzes the applicability of the proposed method based on the field experimental data. The analysis shows that this method could accurately calculate the corresponding static irregularity to a certain extent,but when the actual waveform of static irregularity is occasionally more than or significantly less than the waveform of dynamic irregularity at wave crest,the results might be inaccurate,which presents certain limitations.
ballasted track;vertical profile irregularity;static and dynamic relationship;field experiment
U213.2
:A
1005-0523(2017)01-0118-06
(责任编辑 刘棉玲)
2016-09-26
李凤煜(1993—),女,硕士研究生,研究方向为轨道工务。
许玉德(1965—),男,教授,工学博士,博士生导师,主要研究方向为轨道管理,轨道养修技术。
猜你喜欢
云南画报(2021年8期)2021-11-13
北京航空航天大学学报(2021年6期)2021-07-20
防爆电机(2020年4期)2020-12-14
装备制造技术(2020年2期)2020-12-14
今日农业(2019年12期)2019-08-15
雷达学报(2018年5期)2018-12-05
通信电源技术(2016年3期)2016-03-26
专用汽车(2015年1期)2015-03-01
凿岩机械气动工具(2014年2期)2014-03-01
汽车与新动力(2012年5期)2012-03-25