
三维激光扫描点云直棱特征点填补方法
2017-03-09 02:51徐广鹏姚吉利
山东理工大学学报(自然科学版) 2017年2期
徐广鹏, 姚吉利
(山东理工大学 建筑工程学院,山东 淄博 255049)
三维激光扫描点云直棱特征点填补方法
徐广鹏, 姚吉利
(山东理工大学 建筑工程学院,山东 淄博 255049)
在三维激光扫描中按照一定的角度分辨率对扫描物体进行离散化采样时,由于物体表面点云中棱角特征模糊,若直接用其构建三维表面模型,在棱角处会导致严重失真,进而影响模型的分析和应用.针对此问题提出了物体棱角自动化填补方法,其技术路线是:首先对点云建立空间索引、精简数据;其次根据扫描点云的法向量,对扫描点云进行非监督分类,从而将属于一个平面的点分为一类;最后利用平面相交的办法填补直线棱角上的特征点.通过实验证明,该方法自动化程度高、填补结果准确,能够使得建立的三维模型与真实物体更加接近,模型分析结果更加准确.
三维激光扫描;平面聚类;特征增补;面积相对误差
地面三维激光扫描(Terrestrial Laser Scanner,TLS)是一种速度快、高精度、大密度获取物体表面点云的测量技术,应用于多个领域[1].无论哪个领域的应用,都要建立物体表面三维模型,三维建模的两个关键问题是保证模型点的高精度和模型的完整性,但是由于扫描点之间有间隔,扫描仪发出的激光束很难落到被扫描物体的尖锐特征上,这导致获得的扫描点云中缺失大量的特征点[2],因此直接依靠采集的点云构建的三维模型存在物体表面代表性误差并且不真实[3].如果在建模以前,对扫描物体点云进行特征点填补,则能更好的表达物体表面形态[4-5],这个过程称为点云特征化.对点云进行特征填补的方法有两类,一类是用影像填补,另一类是基于纯扫描点云的填补.赵自明等[6]提出了一种基于影像边缘特征的点云特征点填补方法.该方法需影像与点云配准,并且配准过程中存在误差,填补特征点的效率低,精度不高.基于纯扫描点云的填补的方法是利用扫描点的局部邻域协方差矩阵的特征值、法矢、 曲率等作为依据,提取点云中的特征点,然后根据一定的准则用特征点生成特征线,插值特征线上的点.利用上述方法填补特征点往往需要迭代计算,计算量大,并且计算结果不准确,难以获得理想的填补结果.针对以上两种方法的不足,本文提出了基于几何属性的物体直棱填补方法.其基本原理是根据扫描点的法向量,使用共享近邻聚类算法,对点云进行聚类分析,得到物体面点云,使用平面相交的方法,对被扫描物体尖锐特征上的特征点进行填补.
1 棱角填补原理
1.1 数据预处理
地面激光扫描无论用于闭合的单个物体,还是开放的大范围地形测绘,都需通过有限视场、不同视角、不同空间分辨率的多站扫描,才能完成物体形态或地表形态测量,所以对得到的多站点云,首先进行点云定向,将多站坐标系统一到同一坐标系中,删除建筑物之外的点,然后进行点云重采样,使点云在空间分布均匀化.
1.2 建立索引
X=X0+iΔ+dx
Y=Y0+jΔ+dy
Z=Z0+kΔ+dz
(1)
式中dx、dy、dz为不满Δ的尾数.
图1 点云分割示意图
1.3 数据精简
计算棱角点坐标只需要棱线附近的几十个点即可,在对点云分类以前删除平面中远离棱线的点,只保留棱线附近的点,可减小计算量,提高计算速度.对建立空间索引的点云,若同一个栅格内的点云在一个平面内,则认为此栅格中的点远离棱线,将其中的点删除,此过程称为数据精简.
首先按公式(1)对点云建立空间索引,按公式(2)计算同一个栅格中N个点的协方差阵C、C的3个特征值λ1≥λ2≥λ3和拟合度M[12]
(2)

1.4 点云按平面聚类
首先计算数据点的法向量,本文采用改进的基于局部表面拟合的方法[14]计算精简后的点云的法向量,对得到的数据点建立KD-Tree空间索引,搜索每个数据点的k邻近点,根据k个点的坐标拟合平面,平面拟合方程为
AX+BY+CZ-1=0
(3)

(4)
式中X,Y,Z是平面上扫描点坐标,误差方程为

(5)
平差后平面的单位法线向量为n=
(6)
拟合误差为
(7)


原始点云图2 拟合误差阀值的选取
实验证明,拟合误差阀值选取0.0005m,会取得比较理想的结果.
本文选用的聚类方法为基于网格的共享近邻聚类算法[15],该算法的优点在于不需要输入聚类的个数,并且能在聚类过程中删除噪声点,孤立点.该算法分步完成,第一步对得到的单位法向量建立空间索引,统计每个栅格中的节点个数,将数量小于阀值的栅格中的点视为噪声点,大于阀值的计算同一个栅格中点的重心坐标;其次对得到的重心坐标进行聚类分析,查找每个重心点坐标的k临近点,比较每两个节点的k邻近点,若公共点个数大于阀值则为一类.对单位法向量聚类得到的聚类结果为各组平行平面,为了区分平行平面,对得到的每组平行平面,根据原点到该平面的距离D再次使用基于网格的共享近邻聚类算法进行聚类分析,此时得到的聚类结果中属于一类的点即为同一个平面的点.
1.5 两个平面交线点填补原理

(8)
(9)


(10)
转换之后同一平面点的x,y坐标在一条直线上,即将转换后点云投影到xy平面后点云分布如图4所示.
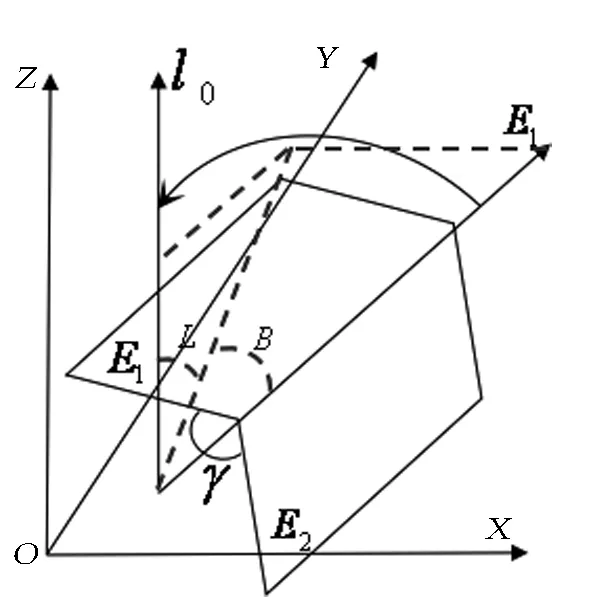
图3 两平面参数示意图
图4 旋转后两平示意图
对旋转后的点云进行特征填补,特征点的x,y坐标为xP、yP,z坐标的范围为两平面在交线l的r邻域内点z坐标范围的交集.最后用R-1将填补的特征点坐标转换到原始坐标系.
1.6 多个平面两两相互交线特征点填补
通过两个条件判断两平面是否进行特征填补,一是两平面的夹角,二是两平面在交线附近是否都有扫描点.每一类点拟合一个平面,得到其法向量和拟合误差,若拟合误差大于阀值则此类点不参与特征点填补.按公式(11)计算每两个平面(图3)E1、E2法向量的夹角γ
cosγ=n·m
(11)
通过γ判断两平面是否平行,若不平行则计算平面交线的法向量l,按公式(9)、(10)对两平面点云进行坐标转换,旋转后的两平面点云分布如图4所示,判断两平面在交线r邻域内是否都存在扫描点,若都存在则填补缺失的特征点.
2 实验分析
2.1 数据介绍
实验采用ZF扫描仪,对楼房进行扫描,每个楼角布设一个球形标靶,标靶架设在地面控制点,保证每站至少能观测到2~3个标靶,共扫描5站,每站约400万个扫描点.标靶控制点平面控制测量采用精密导线测量,水平角观测6个测回,高程控制测量采用精密水准测量,平面点位误差为1.8mm,高程误差为0.4mm.数据处理采用自己开发的基于激光点云定向软件LiDARBBA,采用光束法区域网平差进行整体定向[16],将5站扫描点云统一到同一个坐标系中,定向后5站的平面点位中误差为2mm,空间点位中误差为2.5mm高程中误差为1.5mm.从定向后的点云中取出两块点云作为实验对象,分别为台阶和楼房一角.
2.2 特征点填补和模型分析
2.2.1 特征点填补
台阶扫描点点间距为0.05m,如图5(a)所示.未对台阶点云进行数据精简操作.在计算法向量时邻近点个数选取10,删除平面拟合误差大于0.002mm的扫描点.对单位法向量聚类时邻近点个数取10,公共点个数取5,同一个栅格中节点个数小于20则视为噪声点,平面聚类后共分为14个平面,聚类结果如图5(b)所示.填补特征点间距为0.03m,特征化结果如图5(c)所示.

(a)原始点云 (b)平面聚类结果 (c)填补结果图5 台阶点云特征化
楼房扫描点如图6(a)所示,得到建筑物扫描点14万个.建立空间索引时三个坐标轴上的分辨率均设置为0.8m,计算每个栅格中点云的拟合度M,若M小于5则将此栅格中的点云删除,精简后点云分布如图6(b)所示,从结果中可以看看出含有棱角的栅格被保留下来.计算法向量和点云聚类过程中参数的设置与台阶模型相同,聚类结果如图6(c)所示,共分为26个平面.填补结果如图6(d)所示.可以看到,本文算法可自动填补特征点并且填补准确.

(a)原始点云 (b)精简后点云
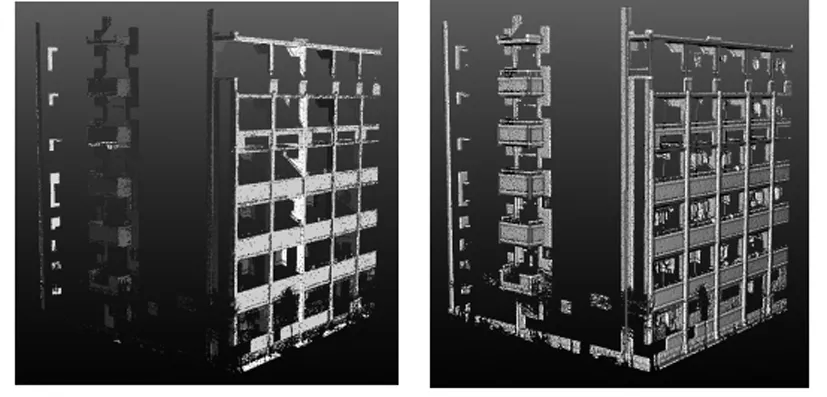
(c)平面聚类结果 (d)填补结果图6 建筑物点云特征化
2.2.2 模型分析
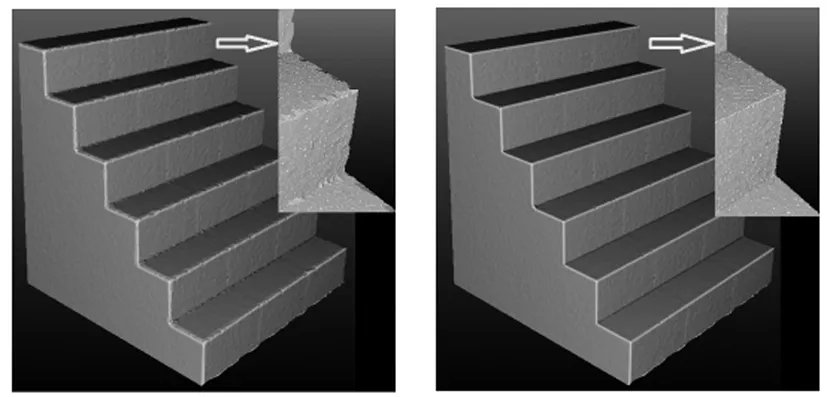
(a)特征填补前台阶三维模型 (b)特征填补后台阶三维模型图7 特征填补前后台阶三维模型对比

3 结论
由于三维激光扫描仪发出的激光束之间有间隔,扫描点是按球面等距离采样,导致获取的扫描点云中缺失大量的特征,棱角模糊,本文提出的基于几何属性的物体直棱自动填补方法,通过面面相交的办法自动填补点云中的棱线点,通过实验可得到如下结论:
(1)特征化点云建立的三维物体模型,在几何形状、大小上,与实际物体更接近,为物体特征分析提供详实可靠的格网化数据,使模型表面积、体积等计算更加准确,同时可减少平面上大量的点,点云数据量会大大减小.
(2)填补的特征点为基于面片精确点云拼接[17-18]、基于直线精确点云拼接提供同名控制点,使点云拼接的精度更高.
(3)扫描物体多种多样,今后对平面与圆柱交线点填补、圆柱与圆柱交线点填补等特征点的填补还要进一步深入地研究.
[1]LERMAJL,BIOSCAJM.Unsupervisedrobustplanarsegmentationofterrestriallaserscannerpointcloudsbasedonfuzzyclusteringmethods[J].IsprsJournalofPhotogrammetry&RemoteSensing, 2008, 63(1):84-98.
[2]LEMMENSM.Terrestriallaserscanning[M]//Geo-information.SpringerNetherlands,2011: 101-121.
[3]石银涛,程效军,张鸿飞.地面三维激光扫描建模精度研究[J].河南科学,2010,28(2):182-186.
[4] 谢祥根,符锌砂.考虑地形特征的三角网数模建立方法[J].中国公路学报,2000,13(1):10-13.
[5]刘学军,符锌砂.TIN数模的点单位算法及网形优化[J].中国公路学报,1997(2):24-31.
[6]赵自明,郝向阳,赵杰.影像边缘特征与LS-SVM的点云边缘残缺区域修补方法[J].测绘科学,2012,37(4): 99-101.
[7]王晏民,郭明.大规模点云数据的二维与三维混合索引方法[J].测绘学报,2012,41(4): 605-612.
[8]龚俊,朱庆,章汉武,等.基于R树索引的三维场景细节层次自适应控制方法[J].测绘学报,2011,40(4):531- 534.
[9]JOCHEMA,HÖFLEB,WICHMANNV,etal.Area-wideroofplanesegmentationinairborneLiDARpointclouds[J].Computers,EnvironmentandUrbanSystems,2012,36(1): 54-64.
[10]SANKARANARAYANANJ,SAMETH,VARSHNEYA.AfastallNearestneighboralgorithmforapplicationsinvolvinglargepoint-clouds[J].Computers&Graphics,2007,31(2): 157-174.
[11]MANDOWA,MARTNEZJL,REINAAJ,etal.Fastrange-independentsphericalsubsamplingof3Dlaserscannerpointsanddatareductionperformanceevaluationforsceneregistration[J].PatternRecognitionLetters,2010,31: 1239-1250.
[12]GARCA-SELLÉSD,FALIVENEO,ARBUÉP,etal.Supervisedidentificationandreconstructionofnear-planargeologicalsurfacesfromterrestriallaserscanning[J].Computers&Geosciences,2011,37(10): 1584-1594.
[13]HOPPEH,DEROSET,DUCHAMPT,etal.Surfacereconstructionfromunorganizedpoints[C]//ACMSiggraphComputerGraphics,1999,26(2):71-78.
[14]PETERNELLM.Developablesurfacefittingtopointclouds[J].ComputerAidedGeometricDesign,2004,21(8):785-803.
[15]刘敏娟,柴玉梅.基于网格的共享近邻聚类算法[J].计算机应用,2006,26(7):1673-1675.
[16]姚吉利,贾象阳,马宁,等.光束法区域网平差的地面激光扫描多站点云自动定向方法[J].测绘学报,2014,43(7):711-716.
[17]王力,李广云,张启福,等.激光扫描中平面拟合及坐标转换模型构建[J].测绘科学技术学报,2012(2):101-104.
[18]侯东兴,李宗春,邓勇.基于共有单平面的点云拼接技术研究[J].大地测量与地球动力学,2015,35(2):248-252.
(编辑:姚佳良)
Automatic packing of straight edge feature in 3D laser scanning point cloud
XU Guang-peng, YAO Ji-li
(School of Architecture Engineering, Shandong University of Technology, Zibo 255049, China )
According to certain angle resolution, we conduct discrete sampling of scanning the object in the process of 3D laser scanning. Due to the fuzzy corner of object surface point cloud, it will lead to serious distortion at the edges and corners, which will affect the analysis and application of the model if we build 3D surface model directly. This paper put forward a method of automated packing corner for this problem. Its technical route is as follows: firstly, we establish a spatial index and simplify data for point clouds. Secondly, we carry on the non-supervised classification which based on the normal vector of point cloud, then judge that belong to a planar points. Finally, we fill up feature points on the straight edge and corner by the plane intersection method. The experimental results show that this method is high automation degree and has accurate filling results, which makes the 3D model closer to the real world and the model analysis result is more accurate.
3D laser scanning; plane clustering; feature patch; area relative error
2016-03-07
徐广鹏,男,810364691@qq.com; 通信作者:姚吉利,男, YSY_941123@sdut.edu.cn
1672-6197(2017)02-0074-05
P232
A
猜你喜欢
科技创新与应用(2021年31期)2021-11-09
河北理科教学研究(2021年4期)2021-04-19
中学生数理化·高一版(2020年1期)2020-02-20
安徽科技学院学报(2019年1期)2019-04-26
中学生数理化·八年级物理人教版(2018年10期)2018-12-06
图学学报(2015年5期)2015-12-05
科普童话·百科探秘(2015年4期)2015-05-14
弹箭与制导学报(2015年1期)2015-03-11
雷达学报(2014年4期)2014-04-23
智慧与创想(2013年3期)2013-05-09
