基于知识的污水生化处理过程智能优化方法
2017-03-10 05:20乔俊飞韩改堂周红标
自动化学报 2017年6期
乔俊飞 韩改堂 周红标
水污染是世界上最令人头疼的问题之一,在未来的几十年将呈现继续恶化的趋势[1].目前,生物处理法是污水处理厂采用最广泛的净水方法.其中,活性污泥法是去除有机污染物最有效的方法之一[2].该方法的重要举措之一就是通过鼓风机向曝气池中充入适当氧气以保持好氧区中溶解氧(Dissolved oxygen,SO)浓度以及通过回流泵回流污水以保持缺氧区的硝态氮(Nitrate nitrogen,SNO)浓度,这需要大量的电力能量供给.随着公众对环境关注度的提高,出水水质参数的相关标准也越来越严格,污水处理厂在“提标改造”过程中不得不使SO和SNO维持于一个较高的运行水平,以便得到满意的出水水质.然而,好氧区SO浓度过高,有可能破坏反硝化所需的缺氧环境,增大缺氧区可快速降解有机碳的消耗,从而影响污水处理效果.同样,合适的缺氧区SNO浓度才能保证反硝化反应的顺利进行,从而提高脱氮去除率.因此,根据污水处理工况的变化对SO和SNO设定值进行动态寻优,是提升污水处理除氮效果和降低运营成本的一种可行办法[3].
在实际污水处理厂中,底层跟踪控制处理过程多采用开关控制和PID控制等传统控制方法[4−6].Carlsson等[4]设计PI、PD和PID等多种控制策略并集成到BSM1中作为控制性能比较的基准控制器.Wahab等[5]针对硝化反硝化污水处理过程具有的强非线性和不确定干扰等特点,设计了自整定多变量PID控制器,结果显示闭环控制性能得到极大提高.Harja等[6]针对污水处理过程溶解氧控制设计了分数阶PI控制器,结果显示所设计控制器能够有效抑制参数变化带来的控制品质变差的影响,具有较强的鲁棒性.虽然传统控制方法结构简单易实现,但其初始设置的参数并不能随时间和工况的变化而动态改变,粗放型的控制过程使得跟踪误差较大,并不能很好地控制污水处理过程中包含的非线性动态反应.此外,在实际污水处理运行过程中,其底层设定值往往由厂内专家通过观察以及经验决定,由于不能实时监督,导致设定值不能随时间和工况的变化而改变,因此往往导致能耗过高或者出水水质较差的现象.
针对这一问题,当前一些优化控制技术被应用在污水处理过程中[7−13].Ostace等[7]采用模式搜索算法(Pattern search,PS)优化溶解氧设定值,结果显示总成本下降7%.Qiao等[8]针对溶解氧和硝态氮的优化控制,采用数据驱动的自适应优化控制器(Data driven adaptive optimization control,DDAOC)优化能耗和出水水质加权和构成的目标函数,结果显示能耗降低8.5%.韩广等[9]采用Hop field神经网络结合拉格朗日乘子法设计污水处理过程优化控制方案,结果显示总能耗降低5.3%.Santn等[10]采用模型预测控制(Model predictive control,MPC)、前馈控制(Feedforward control,FF)和模糊控制器构建两层控制器优化溶解氧设定值,结果显示晴好天气下总能耗下降6.9%.Zhang等[11]采用遗传算法独立地优化操作成本和出水水质,结果显示在保证出水水质参数达标的同时,有效地降低了操作成本.Sweetapple等[12]针对温室气体排放量、生产成本和出水污染物浓度的多目标优化问题,采用非支配排序遗传算法NSGAII对其进行同时优化以获取污水处理过程最佳的操作参数,结果显示在保证出水水质的前提下,温室气体排放量和生产成本是一对相互竞争的目标.Hreiz等[13]针对某小型污水处理厂能耗过高的问题,采用精英多目标遗传算法同时优化出水水质和操作成本,取得了两者之间的最佳平衡.Qiao等[14]采用模糊神经网络建立能耗和出水水质数据驱动模型,并利用NSGA-II构建动态多目标优化控制方法(Dynamic multi-objective optimization control,DMOOC)对其同时进行优化,结果显示能耗降低了4.94%.文献[7−8]为单目标方法,主要是对溶解氧进行优化控制,优化目标以能耗为主.文献[9−11]利用权值系数将多目标优化问题转化为单目标优化问题,并没有考虑不同目标函数之间的依赖关系.文献[12−14]考虑到污水处理生化反应过程之间相互影响,能耗和出水水质等多目标之间呈现相互冲突的特性,利用多目标优化算法同时优化多个目标,能够得到更富竞争力的折衷解.
然而,以上多目标智能优化方法很少应用历史最优解的信息,对于处理环境相同且最优解决方案变化很小的情况,在新的搜索周期进行完全随机初始化策略会造成昂贵的计算成本[15].因此,如何在处理新的优化周期时有效应用过去最优解的信息成为当前多目标优化算法的重要课题之一[16].污水处理过程作为非线性动态系统,在相似的处理环境(入水流量、污染物浓度)下具有相近的解决方案,因此应用知识指导优化算法的搜索将能够得到更精确的优化解.
基于以上多目标优化算法以及污水处理过程特性的分析,本文提出一种基于知识的多目标粒子群(Knowledge-based multi-objective particle swarm optimization,KBMOPSO)优化算法,用于实现污水生化处理过程的智能优化控制.该方法将入水流量(Q0)、入水氨氮(SNH,in)和入水总氮(Stot,in)作为工况识别参考变量,与最优解建立联系形成知识模型,用于引导KBMOPSO的搜索过程.实验结果验证了所提方法的有效性,为污水处理厂提供了切实有效的优化控制方案.
1 问题描述
1.1 过程描述
当前污水处理厂多采用活性污泥法作为处理工艺,其中包含的微生物反应使得处理过程具有非线性和大滞后特性,其工艺布局如图1所示,图1中参数定义在表1中给出.污水处理过程由两部分组成,第1部分为生化反应区,主要通过微生物反应清除污水中含氮污染物;第2部分为二层池,主要通过物理沉降功能实现泥水分离.
1.2 问题分析
图1所示的污水处理过程在运营过程中存在两个重要的考察指标,能耗和出水水质.能耗主要包括曝气能耗和泵送能耗,代表污水处理过程90%的电能消耗.出水水质则直接反映了污水处理过程的好坏.对于一个给定的污水处理过程存在如下特性:1)生化反应的存在以及入水流量和组分浓度的剧烈变化,使得其精确控制极其困难;2)当出水指标超标时需要支付昂贵的罚款,大大提高了污水处理厂的运营成本;3)由于入水的变化,专家需时刻关注污染物的变化从而制定合适的控制变量设定值,需要专家浪费大量的精力才能完成这项任务.
2 污水处理混合智能优化控制系统

图1 污水处理系统工艺布局图Fig.1 Wastewater treatment system process layout
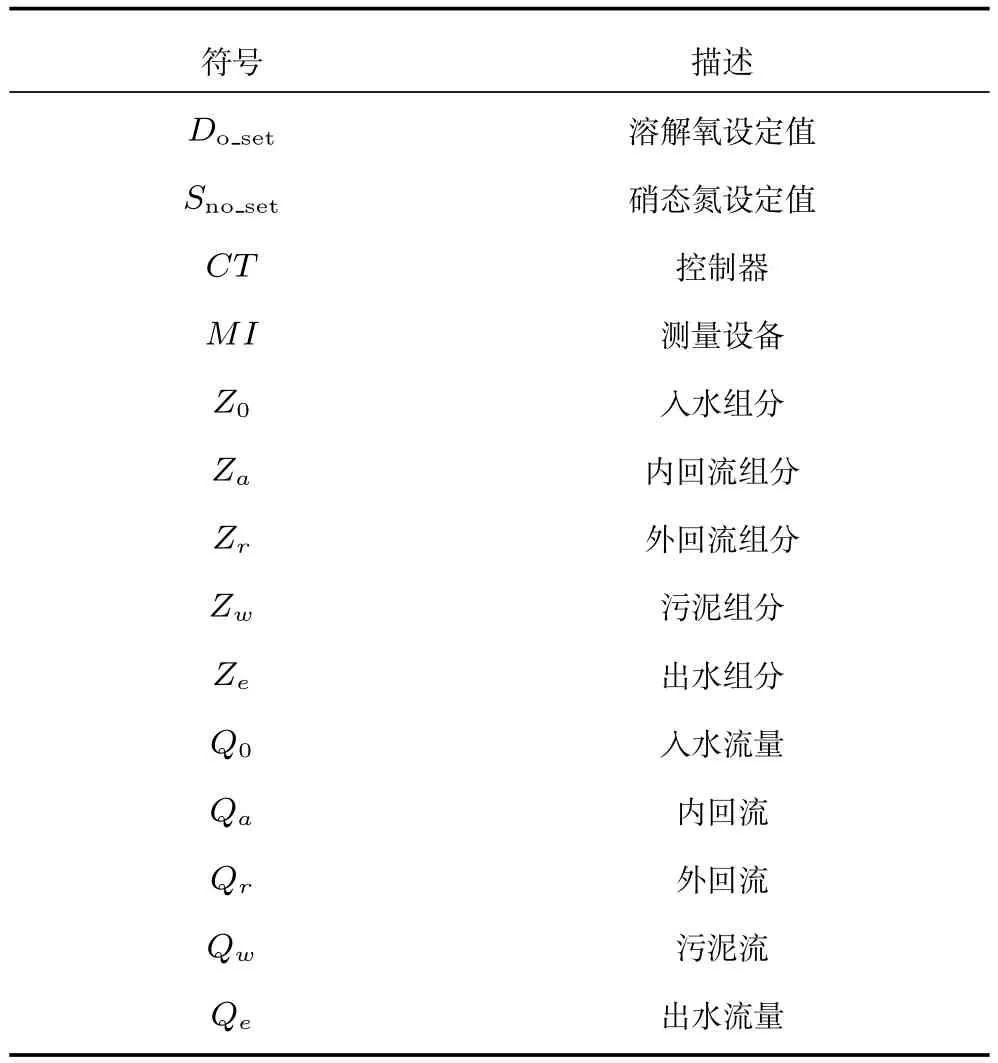
表1 参数描述Table 1 Parameters description
为了解决污水处理过程中能耗过大和底层跟踪控制平稳性较差的问题,本文提出一种基于KBMOPSO的多目标优化控制方法,其控制结构如图2所示.此系统包含知识库、多目标优化模块和底层前馈神经神经网络(Feedforward neural network,FNN)控制器模块.

图2 基于KBMOPSO的多目标优化控制方法Fig.2 Multiple objective optimization control system based on KBMOPSO
在图2中,y和yr分别代表控制变量实际输出以及控制变量设定值,C表示知识库中的案例,e为控制变量设定值与实际输出值之间的误差,w,µ和σ分别代表FNN控制器的后件权值、隶属函数层神经元的中心以及宽度.系统各模块描述如下:
2)知识库.知识库用于存储历史非支配解,以Q0,SNH,in和Stot,in作为工况识别参考变量,将参考变量与最优解建立关系形成知识模型存储在知识库中,通过判定当前工况与知识库中历史非支配解对应工况的相似性,进而在新的优化周期中应用历史非支配解初始化种群,以引导KBMOPSO的搜索区域.
3)底层控制器.采用FNN设计底层控制器,此控制器充分利用神经网络的非线性自适应能力,在设定值以及工况发生变化时,迅速调整参数以映射系统变化的输入输出关系.
2.1 知识库的建立与应用
本文提出一种基于知识的MOPSO智能优化搜索算法,如图3所示.
2.1.1 知识表达
知识表达的一般方法包括属性特征值描述方法[17]、框架表示方法[18]和面向对象的方法[19]等.由于属性特征值描述方法具有简单明了的特点,本文选用其作为知识库中案例的表达形式,如第k个案例形式可表达为

其中,n表示案例的总数目,Xk和Yk分别表示第k个案例的工况识别参考变量和解决方案(历史最优解).

图3 KBMOPSO程序流程图Fig.3 The program flow chart of KBMOPSO
2.1.2 工况检索和工况匹配
由于最近邻法简单实用,本文利用其结构设计相似工况的搜索算法[20−21].污水处理过程当前工况与知识库中第k个历史工况的检索方程可表示为

其中,sim(xi,xi,k)表示X和Xk之间的相似性,wi表示通过专家经验获得的第i个表达属性的权重值.约束条件定义如下:

若满足条件

则第k个历史工况可视为匹配相似工况.其中,wth是分析工况相似程度的阈值.
2.1.3 KBMOPSO种群初始化
如果满足不等式(4)的案例数目是为m,种群大小为N,则KBMOPSO种群初始化为
步骤1.清除种群P;
步骤2.引用满足不等式(4)的历史非支配解作为m个种群初始解;
步骤3.随机初始化N−m个解;
步骤4.初始化结束.
如果满足

表明没有符合条件的历史工况,则KBMOPSO种群初始化为
步骤1.清除种群P;
步骤2.随机初始化N个解;
步骤3.初始化结束.
2.1.4 新工况存储
当式(5)满足条件时,表明系统出现新的处理工况,如图3中所示,将KBMOPSO随机搜索种群初始化后计算得到的最优解作为新工况的解决方案,建立工况识别参考变量与最优解之间关系,形成知识模型存储在知识库中.
2.2 多目标优化模块
多目标优化模块包括目标函数的建立、多目标优化和Pareto解选取.本文首先建立模糊神经网络的能耗和出水水质的数据驱动软测量模型作为目标函数,然后利用多目标粒子群优化算法对目标函数进行优化,最后利用模糊隶属函数法选取最优折衷解,从而获得控制变量的优化设定值.在FNN建模中,将入水流量、溶解氧设定值和硝态氮设定值作为输入量,能耗和出水水质作为输出量,利用BSM1基准平台离线产生500组数据,建立软测量模型.在多目标粒子群优化算法(Multi-objective particle swarm optimization,MOPSO)中,为了能够提供给决策系统足够多和足够好的解,期望算法获得Pareto前沿尽可能收敛且分布均匀.本文参考文献[22],利用动态拥挤距离法设计了一个新颖的MOPSO算法.
在MOPSO中,粒子通过不断调整位置和速度的更新公式来寻找全局最优解,本文所提的MOPSO算法更新公式如下:
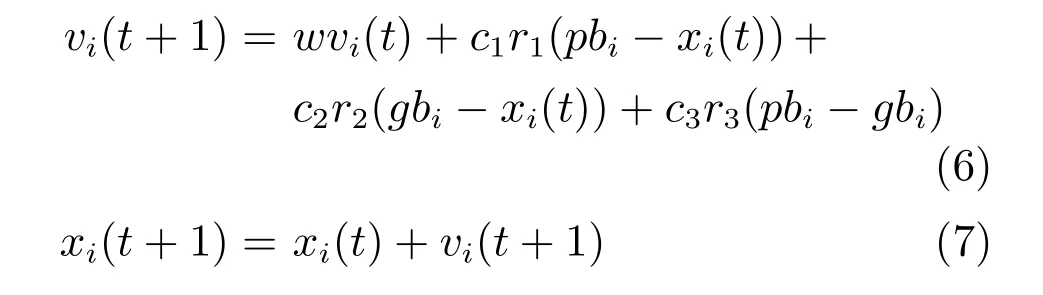
其中,t为迭代次数,w为惯性权重,c1,c2和c3为学习因子,r1,r2和r3为[0,1]之间均匀分布的随机数,pbi和gbi为粒子pi的个体引导者和全局引导者.在式(6)中,通过增加个体引导者和全局引导者之间的随机扰动提供给粒子更多的位置搜索信息,有助于提高算法跳出局部最优的能力.
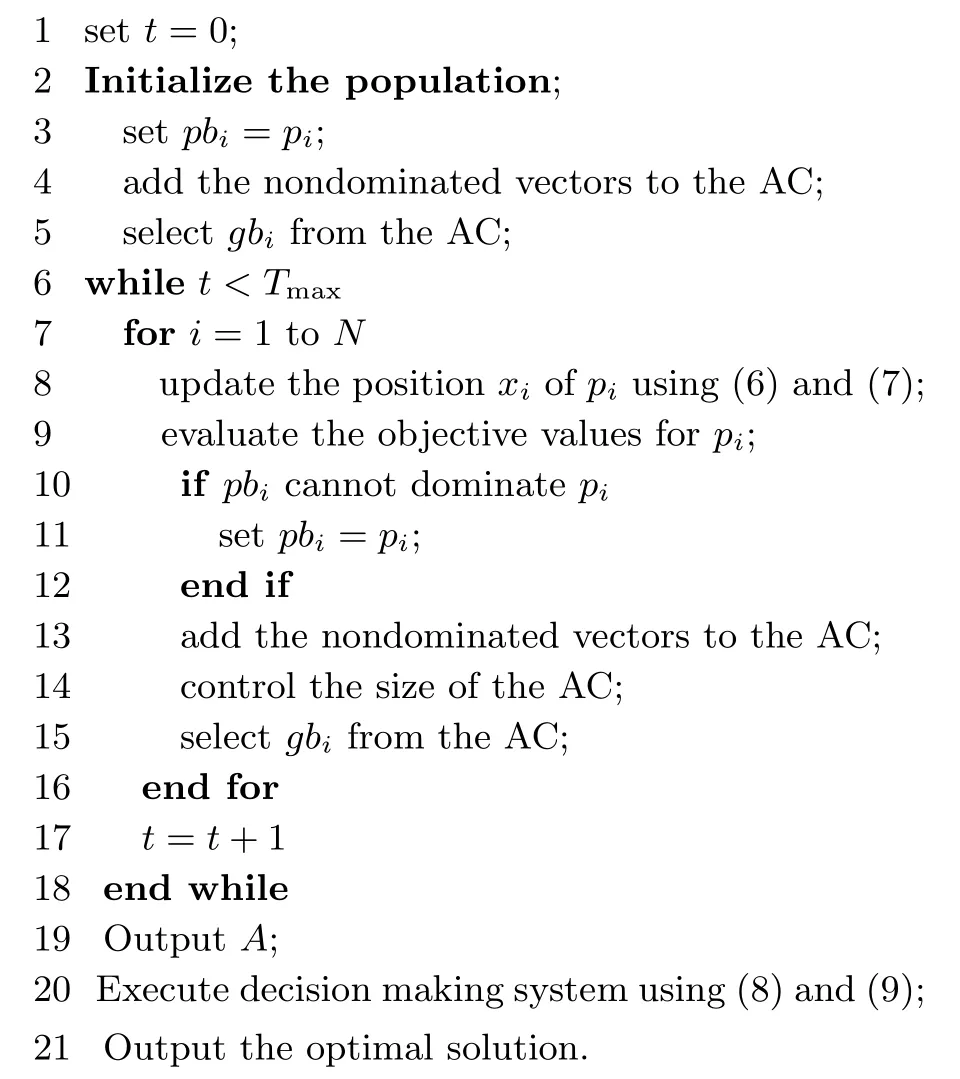
在MOPSO中,利用外部档案(Archive,AC)保存非支配解,通过判断拥挤距离维护外部档案.首先将种群中的非支配解加入外部档案,当外部档案中的非支配解个数超出设定的容量后,动态删除拥挤距离小的非支配解.个体引导者的选择利用Pareto支配关系确定,全局引导者的选择利用规模为2的锦标赛法决定.最终外部储备集中的非支配解作为多目标优化模块的输出结果提交给决策系统.
本文采用模糊隶属函数法设计了智能决策系统.对于第i个目标函数Fi,外部储备集中非支配解xk的满意度定义如下:
其中,Fmax,i和Fmin,i分别是第i个目标函数Fi的最大值和最小值.非支配解xk的满意度为

其中,M是目标个数,|Ar|是外部储备集元素个数.选取µk的最大值对应的解为折衷解.MOPSO算法的伪代码如下:
算法1.MOPSO算法
2.3 底层控制模块
由于污水处理过程控制变量设定值频繁变化,使得底层跟踪控制过程增加了难度,本文基于模糊神经网络(Fuzzy neural network,FNN)设计底层控制器,利用梯度下降法在线更新网络中所含参数,使得控制器的参数可以随着控制变量设定值的变化而调整,改善了优化控制下的跟踪控制性能.FNN结构如图4所示.

图4 FNN结构图Fig.4 The structure of FNN
采用S型FNN建立直接自适应控制器,神经网络输出为

其中,X=[x1,x2,···,xm]为FNN 的输入向量,m为输入变量数,cj=[c1j,c2j,···,cmj]和δj=[δ1j,δ2j,···,δmj]分别为规则层第j个神经元对应的隶属函数层神经元的高斯函数中心和宽度,φj是规则层第j个神经元归一化后的输出,wj为规则层第j个神经元与输出层神经元之间的连接权,j=1,2,···,n,n为规则层神经元数.
控制量u为

其中,∆u(t)=f(X).
FNN的参数学习采用梯度下降算法,定义目标函数为

其中,yd是网络期望输出,y为网络实际输出.令Θ=[w,c,δ]T表示参数向量,则参数更新公式为

其中,η为FNN参数学习率.
3 实验结果及分析
3.1 评价指标
实验基于国际通用仿真平台BSM1进行,评价指标由BSM1定义的曝气能耗AE、泵送能耗PE和出水水质EQ组成.具体公式如下:
3.2 参数设置
所有仿真实验均采用Matlab R2013b编程环境,运行算法的计算机采用四核配置,主频为2.9GHz.控制器的采样周期对控制性能有着重要的影响,本文控制器采样周期为45秒,优化周期为2小时,采用晴好天气数据进行仿真分析.底层控制器由两个自适应FNN组成,通过试错法确定了网络结构2-6-1,为了保证控制器的稳定性,参数学习率η不宜过大,通过经验选择为0.01.
3.3 结果及分析
知识库中初始案例数为15个,采用区域平均分割生成.实验数据源于BSM1文件,晴朗天气共包含14天数据(前7天数据用于训练,后7天数据用于测试).入水流量和入水组分变化如图5和图6所示,图5显示入水流量及组分变动比较剧烈.图6中SS、SNH和SND分别代表入水易生物降解底物、入水氨氮和入水溶性可生物降解有机氮.
案例生成曲线如图7所示,图中显示案例在第7天左右达到41个时已包含所有案例,之后优化时新案例不再增加,这与BSM1对于数据的设置模式相符(前7天数据和后7天数据类似),表明了本文中所提方法关于知识库案例生成机制设置的合理性.
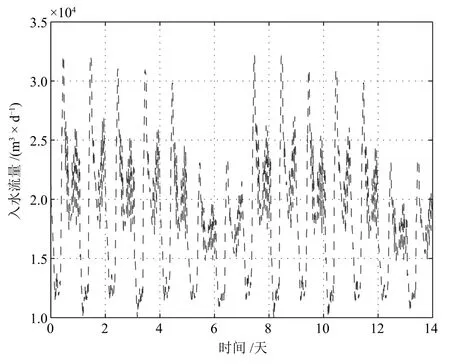
图5 晴朗天气入水流量Fig.5 In fluent flow in dry weather

图6 晴朗天气入水组分Fig.6 In fluent component in dry weather
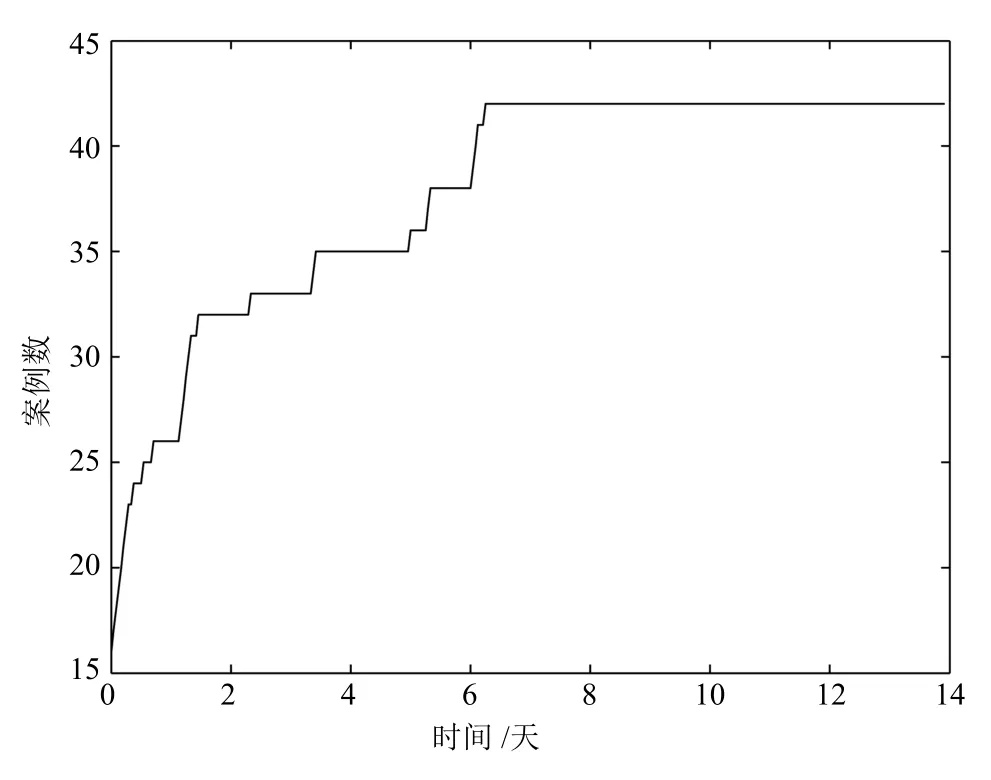
图7 案例数Fig.7 The case numbers
图8 和图9分别给出了能耗和水质的FNN建模效果.从图8和图9可以看出,通过数据驱动建立的模型精度较高,可以作为多目标优化算法的目标函数.图10给出了KBMOPSO与MOPSO在某个优化周期获得的Pareto解集以及通过智能决策系统选取的最优折衷解.从图10可以看出,KBMOPSO比MOPSO的收敛性更好,获取的优化设定值能够使污水处理过程达到节能降耗的目的.
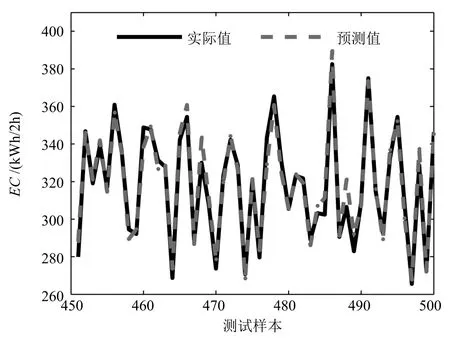
图8 能耗建模效果Fig.8 Model performance of EC
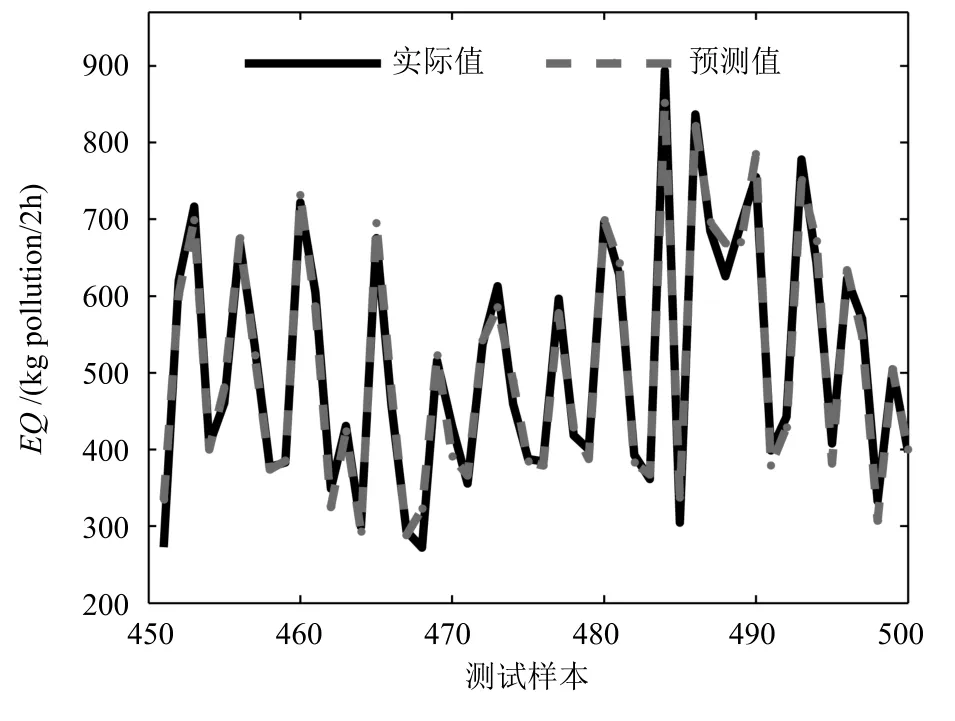
图9 出水水质建模效果Fig.9 Model performance of EQ
图11 和图12分别给出了设定值优化结果及跟踪效果和出水水质参数变化情况.由图11可以看出,KBMOPSO能够根据处理工况的变化自适应调整优化设定值.优化设定值的调整趋势与入水流量和入水水质参数的变化一致.同时,利用FNN实现的底层跟踪控制能够满足对控制精度的需求.由图12可以看出,相比PID恒定值控制,KBMOPSO控制方法出水Ntot明显降低,出水SNH等都没有较大变化.KBMOPSO方法的出水水质指标也有一定程度的下降.

图10 Pareto最优解集及最优折衷解确定Fig.10 Pareto optimal solutions and identify of optimal

图11 设定值优化结果及跟踪效果Fig.11 Optimization and tracking results of the set point values

图12 出水水质参数变化情况Fig.12 The change of water quality parameters

表2 不同算法性能比较Table 2 Performance comparison for different algorithm
表2给出了不同算法之间的性能比较.从表2可以看出,KBMOPSO方法的总能耗为865.9kWh/d,出水水质5092.4kg pollution/d,相比PID恒定值控制,分别下降了6.62%和0.7%.可见,基于KBMOPSO的优化控制方法,可以在不降低出水水质指标的前提下,有效地降低了能耗,节约了运行总成本.
4 结论
针对污水处理过程能耗较大的问题,提出一种基于知识的智能优化控制方法.该方法采用具有案例表达、检索和修订等功能的知识模型对MOPSO的搜索过程进行引导,实现了对溶解氧和硝态氮设定值的实时调优,采用模糊神经网络构建底层控制器,实现污水处理过程的底层精确跟踪控制.所提方法在实现出水水质达标的前提下,有效地降低了能耗,节约了操作成本.仿真实验结果也验证了混合智能优化方法能够有效降低系统运行总成本,取得了较好的节能效果.
1 Shannon M A,Bohn P W,Elimelech M,Georgiadis J G,Mari˜nas B J,Mayes A M.Science and technology for water puri fication in the coming decades.Nature,2008,452(7185):301−310
2 Hamitlon R,Braun B,Dare R,Koopman B,Svoronos S A.Control issues and challenges in wastewater treatment plants.IEEE Control Systems,2006,26(4):63−69
3˚Amand L,Carlsson B.Optimal aeration control in a nitrifying activated sludge process.Water Research,2012,46(7):2101−2110
4 Carlsson B,Rehnstrm A.Control of an activated sludge process with nitrogen removal–a benchmark study.Water Science and Technology,2002,45(4−5):135−142
5 Wahab N A,Katebi R,Balderud J.Multivariable PID control design for activated sludge process with nitri fication and denitri fication.Biochemical Engineering Journal,2009,45(3):239−248
6 Harja G,Nascu I,Muresan C,Nascu I.Improvements in dissolved oxygen control of an activated sludge wastewater treatment process.Circuits,Systems,and Signal Processing,2016,35(6):2259−2281
7 Ostace G S,Baeza J A,Guerrero J,Guisasola A,Cristea V M,Agachi P S,Lafuente J.Development and economic assessment of different WWTP control strategies for optimal simultaneous removal of carbon,nitrogen and phosphorus.Computers and Chemical Engineering,2013,53:164−177
8 Qiao J F,Bo Y C,Chai W,Han H G.Adaptive optimal control for a wastewater treatment plant based on a data-driven method.Water Science and Technology,2013,67(10):2314−2320
9 Han Guang,Qiao Jun-Fei,Han Hong-Gui,Chai Wei.Optimal control for wastewater treatment process based on Hopfield neural network.Control and Decision,2014,29(11):2085−2088(韩广,乔俊飞,韩红桂,柴伟.基于Hop field神经网络的污水处理过程优化控制.控制与决策,2014,29(11):2085−2088)
11 Zhang R,Xie W M,Yu H Q,Li W W.Optimizing municipal wastewater treatment plants using an improved multi-objective optimization method.Bioresource Technology,2014,157:161−165
12 Sweetapple C,Fu G T,Butler D.Multi-objective optimisation of wastewater treatment plant control to reduce greenhouse gas emissions.Water Research,2014,55:52−62
13 Hreiz R,Roche N,Benyahia B,Lati fiM A.Multi-objective optimal control of small-size wastewater treatment plants.Chemical Engineering Research and Design,2015,102:345−353
14 Qiao J F,Zhang W.Dynamic multi-objective optimization control for wastewater treatment process.Neural Computing and Applications,2016.1−11,DOI:10.1007/s00521-016-2642-8
15 Mendes R,Rocha I,Pinto J P,Ferreira E C,Rocha M.Differential evolution for the offline and online optimization of fed-batch fermentation processes.Advances in Differential Evolution.Berlin:Springer-Heidelberg,2008.299−317
16 Wang Y,Li B.Investigation of memory-based multiobjective optimization evolutionary algorithm in dynamic environment.In:Proceedings of the 2009 IEEE Congress on Evolutionary Computation.Trondheim,Norway:IEEE,2009.630−637
17 Chai Tian-You.Operational optimization and feedback control for complex industrial processes.Acta Automatica Sinica,2013,39(11):1744−1757(柴天佑.复杂工业过程运行优化与反馈控制.自动化学报,2013,39(11):1744−1757)
18 Porter B W,Bareiss R,Holte R C.Concept learning and heuristic classi fication in weak-theory domains.Arti ficial Intelligence,1990,45(1−2):229−263
19 Cunningham P.A taxonomy of similarity mechanisms for case-based reasoning.IEEE Transactions on Knowledge and Data Engineering,2009,21(11):1532−1543
20 Cover T,Hart P.Nearest neighbor pattern classi fication.IEEE Transactions on Information Theory,1967,13(1):21−27
21 Zhou P,Chai T Y,Wang H.Intelligent optimal-setting control for grinding circuits of mineral processing process.IEEE Transactions on Automation Science and Engineering,2009,6(4):730−743
22 Cheng S X,Zhan H,Shu Z X.An innovative hybrid multiobjective particle swarm optimization with or without constraints handling.Applied Soft Computing,2016,47:370−388
猜你喜欢
昆钢科技(2022年2期)2022-07-08
中国应急管理科学(2022年2期)2022-05-23
建材发展导向(2022年2期)2022-03-08
当代水产(2021年10期)2022-01-12
湖北农机化(2021年7期)2021-12-07
今日农业(2021年20期)2021-11-26
建材发展导向(2021年23期)2021-03-08
科学技术创新(2020年12期)2020-06-22
华人时刊(2018年15期)2018-11-10
消费导刊(2017年24期)2018-01-31