多变量逆解耦自抗扰控制及其在精馏塔过程中的应用
2017-03-10 05:20程赟陈增强孙明玮孙青林
自动化学报 2017年6期
程赟 陈增强 孙明玮 孙青林
化工生产是一类普遍存在时变、耦合、时滞的多输入多输出过程对象.化工过程控制往往是在实际工作点附近进行抗干扰控制或者进行稳态调节,因此需要在工作点附近进行线性化,得到系统的传递函数矩阵.以精馏塔的Wood-Berry模型为例[1],系统的传递函数矩阵由一阶时滞子系统组成.系统的输入为回流流量和蒸汽流量,系统的输出分别为甲醇馏出液和塔底产物的百分比.从传递函数矩阵中可以很明显的看出,输入输出之间具有强烈的耦合特性,且每个子系统都具有不同的时滞时间.这使得系统的辨识与控制具有极大的挑战.
在工业现场辨识中,通过施加阶跃信号或不同频率的正弦信号来获取系统的阶跃响应或频率响应[2].得到响应曲线后,人们通过图解的方法求解系统的传递函数[3−4],此种方法在工业现场中得到了广泛地应用.但如果得到的系统响应中混有大量噪声,图解法的计算精度会受到很大的限制.Wang等设计一种改进的频率响应测试实验[5],采用不对称型的矩形信号来获取重要频率的信息,实现了在有噪声环境下系统模型的辨识. Bi等研究一阶时滞系统在阶跃响应下的辨识方法[6],通过对阶跃响应求积分,将系统的积分方程转化为最小二乘辨识问题求解模型.Wang等在此基础上研究了n阶时滞系统阶跃响应下的辨识方法[7−8].Ahmed等进一步提出了在非稳态初始条件下辨识的方法[9].近些年来,渐近法[10]、子空间法[11]等多变量系统辨识方法在化工过程控制得到了广泛的应用,但在处理多变量时滞系统的辨识时仍有许多问题有待进一步研究.
对于化工过程多变量系统,由于其各输出通道间存在耦合,使得原有的单变量控制方法很难直接运用到多变量系统中.模型预测控制作为多变量系统控制方法之一,被广泛地应用于工业过程控制中[12−14].由于预测控制需要时刻求解优化问题,所以整个系统的计算时间和成本都花费较大,这极大地限制了预测控制方法的应用场合.另一种解决方法即为系统设计解耦器,使系统输入输出变量之间的传递函数变为对角矩阵,然后利用单变量的控制方法对每组通道逐一进行控制.常见解耦方法包括:对角矩阵法、相对增益法、特征曲线法等.但当对象传递函数阶数和输入输出变量维数加大时,常见方法设计出的解耦器复杂性大大增加.逆解耦方法[15−17]利用反馈的思想极大地简化了解耦器的复杂程度,结构形式简单,不受系统复杂程度的影响,并可以通过对反馈结构的调整确保解耦器的可实现性,该解耦方法在实际应用中取得显著的效果[18−20].
解耦器是通过被控对象的传递函数矩阵设计出来的,当被控对象的数学模型辨识不准确时,系统的解耦性能将受到影响.化工对象模型的不准确性和外界扰动是不可避免的,这时我们需要一种鲁棒性强的控制方法来获得较好的控制效果.自抗扰控制技术(Active disturbance rejection control,ADRC),由韩京清先生于1998年正式提出[21],该方法将模型的不准确性与外界扰动归结为总扰动,采用扩张状态观测器(Extended state observer,ESO)进行实时估计,并进行补偿,从而实现对总扰动的抑制.ADRC是一种鲁棒性较强的控制方法[22],且与预测控制、鲁棒控制等相比较,ADRC具有结构简单、需要调节参数少等特点.所以在多变量解耦控制中得到了广泛的应用.如Zheng等针对连续搅拌反应釜设计了基于ADRC的解耦控制器[23].张园等针对强制循环蒸发系统设计了ADRC解耦控制器,并给出了控制参数优化的方法[24].Sun等将逆解耦与ADRC相结合,在四水箱液位控制中取得良好的控制效果[20].
本文针对精馏塔的 Wood-Berry模型[1]和Ogunnaike-Ray模型[25]进行辨识并设计自抗扰解耦控制器.主要工作包括:研究有噪声环境中,一阶、二阶时滞系统在阶跃响应测试下的辨识方法;针对辨识模型,采用逆解耦实现多变量系统的解耦;针对解耦后的一阶、二阶单变量时滞系统设计ADRC控制器.
本文综合运用了过程建模、多变量系统逆解耦、自抗扰控制等先进控制技术进行控制系统的综合设计.主要创新之处在于以下两点:
1)传统的自抗扰控制设计通常不考虑被控对象的模型,ESO的阶次选取以及控制器的参数整定等方面主要依赖于调试经验,当系统存在强耦合、时变性、大时滞等特性时,控制器的调试有较大困难.而本文将过程建模辨识与自抗扰解耦控制相结合,在假设模型未知的情况下,通过辨识的结果设计逆解耦自抗扰控制器,充分利用可获得的系统的已知信息,并根据模型实际情况对解耦器进行改进,确保解耦器的物理可实现性;针对时滞系统采用改进ESO,使观测器获得较大的带宽,更好估计系统总扰动.通过仿真对比验证了所提出的辨识与控制相结合的综合设计方法的有效性与实用性.
2)以往的针对多变量耦合系统的自抗扰控制,主要采用如下两种方法:第一种方法是把各回路间的耦合作用直接看作扰动,利用自抗扰控制器的抗干扰能力在一定程度上降低其他回路对自身回路扰动的影响,但是当耦合作用较强时,这种方法的解耦效果就有一定局限性.第二种方法是先对多变量系统进行前馈解耦,然后对解耦后的各回路设计自抗扰控制.但是该方法需要比较准确地知道过程的模型信息,当过程模型与实际系统模型存在较大的建模误差时,前馈解耦的效果并不理想.本文提出基于逆解耦和自抗扰控制结合的方法控制强耦合的多变量系统,经过仿真实验验证了当模型存在较大的建模误差时,仍具有很好的解耦及动态性能.
1 系统模型的辨识
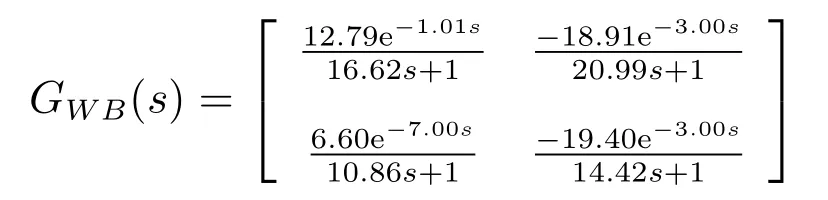
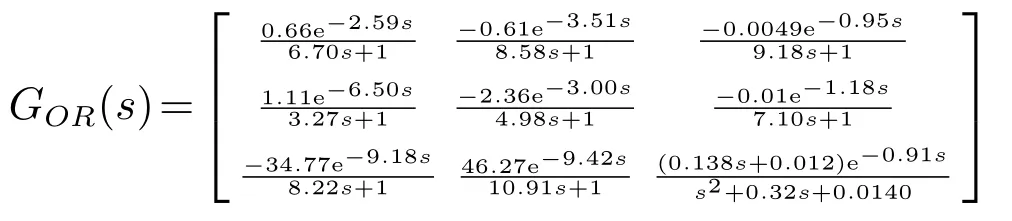
精馏塔的Wood-Berry(WB)模型和Ogunnaike-Ray(QR)模型如式(1)和式(2)所示,可以看出系统模型是由一阶、二阶时滞传递函数组成.本文针对一阶、二阶时滞对象研究在阶跃响应下模型辨识的方法.
1.1 一阶时滞系统辨识
假设一阶时延系统的传递函数如式(3)所示:

单位阶跃响应下,系统的输出y(s)可以表示为:

其中:λ=1/T.在有白噪声n(t)干扰情况下,系统的输出响应y(t)可以表示为:

由式(5)可知:K=y(∞)−n(∞).通过对系统到达稳态时的一段数据求取平均值,可以计算得到参数K的取值.
假设∆y(t)=y(t)−K,则有:

设t1>τ,∆y(t)在区间[0,t1]上的积分可以表示为:
将式(6)代入到式(7)中可以得到:

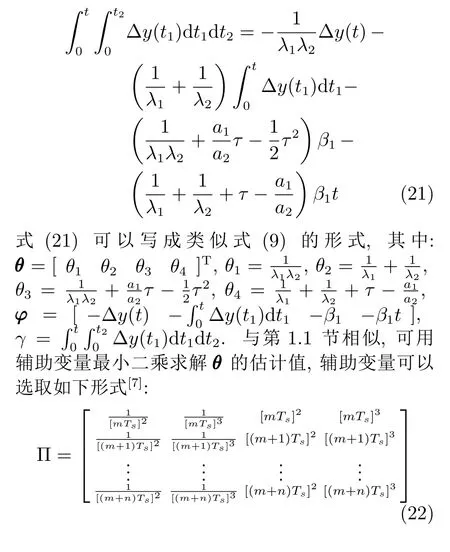
通过式(9),可将系统参数利用最小二乘方法辨识出来.对系统的阶跃响应进行采样,设采样时间为Ts,提取从第m个采样点到第m+n个采样点的数据,将其表示为如下的矩阵方程形式:

利用最小二乘方法,可以求出参数θ的估计值:

考虑到∆中含有噪声的积分项,最小二乘会产生有偏估计.这里采用辅助变量法,提高辨识的准确性,辅助变量Π选取如下[7]:
式(9)中参数θ采用辅助变量最小二乘的估计值可以表示为:

1.2 二阶时滞系统辨识
二阶时滞系统的辨识过程与一阶时滞类似,这里假设系统的传递函数如下所示:

单位阶跃响应下,系统的输出y(s)可以表示为:

由式(16)可知:β1=y(∞)−n(∞).通过对系统到达稳态时的一段数据求取平均值,可以计算得到参数β1的取值.设 ∆y(t)=y(t)−β1,t1>τ,∆y(t)在区间[0,t]上的一次积分和二次积分可以表示为:

通过式(16)和式(17)可得:
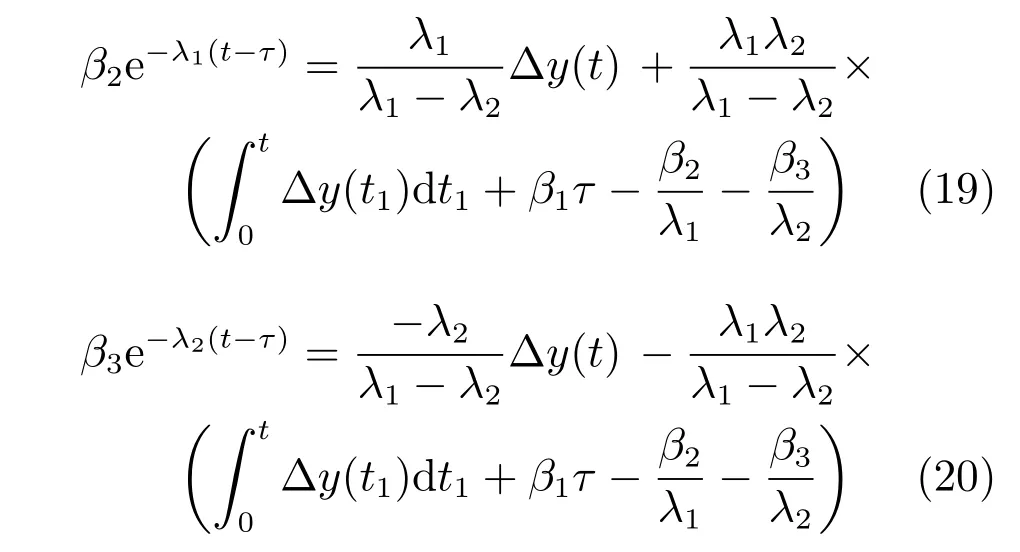
将式(19)和式(20)代入式(18)可得:
2 逆解耦器设计
两输入两输出(Two input two output,TITO)系统逆解耦器的结构如图1所示,被控对象的第一通道输入u1等于该通道控制器产生的信号c1与另一通道输入u2的线性组合.其中d12=−g12/g11,d21=−g21/g22.
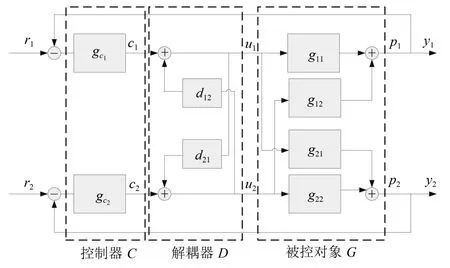
图1 TITO系统逆解耦器结构图Fig.1 Inverted decoupling structure of TITO system
将其推广到n个输入n个输出的系统中,可以得到如下关系式:
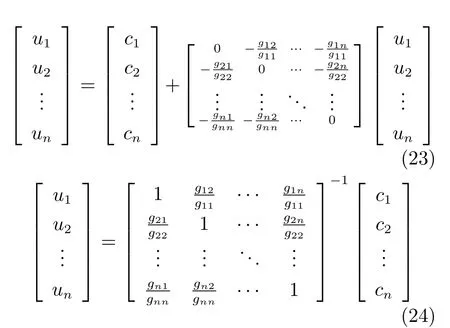
解耦后被控对象的传递函数可以表示为式(25)所示,从式中可以看出解耦后的传递函数矩阵为对角矩阵.
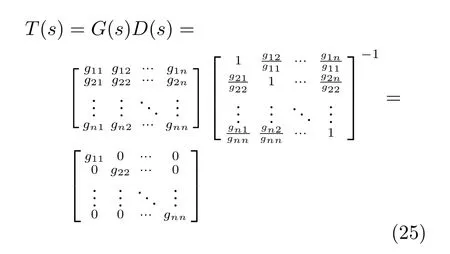
从式(23)中,我们可以看出逆解耦器设计形式简单,反馈通道上为两个传递函数相除.这一步需要考虑比值的传递函数是否可物理实现的问题,如出现传递函数分子阶次大于分母阶次,传递函数时滞时间为负等情况.针对本文Ogunnaike-Ray模型,解耦通道的g13/g11,g23/g22会导致传递函数中e−τs的τ<0,传递函数无法实现.这里考虑对解耦器做如下改进:在解耦器与被控对象第三个输入之间u3处加入一个时滞环节e−Ts,T=max(τ11−τ13,τ22−τ23),即相当于将被控对象传递函数矩阵的第三列的传递函数加上T秒的延迟时间,形成新的传递函数矩阵,确保解耦反馈通道上的传递函数可实现.
3 自抗扰控制器设计
ADRC在时滞系统控制中已有了广泛的应用,并取得良好的控制效果[26−29].经过逆解耦后,原本耦合严重的MIMO系统变成了对角传递函数矩阵,这样我们就可以通过对每个通道分别设计自抗扰控制器,实现对原系统的解耦控制.观察Wood-Berry模型和Ogunnaike-Ray模型可以发现,对角线上的传递函数大都为一阶时滞系统,仅Ogunnaike-Ray模型第三通道上为二阶系统,但其相对阶次也为一阶,可通过一次积分将系统变为一阶系统来处理.这里将一阶时滞系统传递函数(3)改写为时域形式:

其中:w(t−τ)为系统外部扰动,b0为K/T的估计值,成为总扰动,是系统内部不确定性和外部扰动之和. ADRC的核心思想就是将系统的总扰动f通过ESO观测出来.这里将总扰动看成系统的扩张状态x2,则式(26)可用如下状态空间方程表示:

其中:z1,z2为原系统状态x1,x2的观测值.ωo称为观测器的带宽[30].
在满足一定条件下,理论分析结果表明上述ADRC控制器是闭环稳定的,可参考文献[31−32].
考虑到系统存在时滞,观测器(28)的带宽ωo将会受到时滞时间的影响,从而影响总扰动的观测效果.将式(28)作如下改动,在输入u(t)处引入时滞环节,使u(t)和y(t)在时序上可以相互匹配.文献[28]证明了在如此改动下,系统将获得更大的带宽,且给出了系统所能容忍的最大时滞时间.

在得到系统总扰动的观测值z2后,可将系统的控制信号设计为如下形式:

将式(30)代入式(26)可得:

从式(31)可以看出,通过对扰动进行补偿,输入u0至输出y之间近似为一个积分器环节,通过一个比例控制器就可以实现对系统的控制:

4 仿真实验
本节将分别对Wood-Berry模型和Ogunnaike-Ray模型进行辨识实验和解耦控制,以检验本文所述方法的有效性.并将本文解耦控制方法与文献[20]和文献[25]中的方法相比较,检验逆解耦方法的解耦性能以及改进ESO下的ADRC控制效果.系统辨识实验通过阶跃测试得到系统的输入输出数据,在输出数据中加入白噪声,信噪比(Noise-tosignal ratio,NSR)由如下公式定义:

通过均方误差来检验辨识的结果:

4.1 Wood-Berry模型
在NSR=1%环境下得到的辨识结果为:
在NSR=10%环境下得到的辨识结果为:
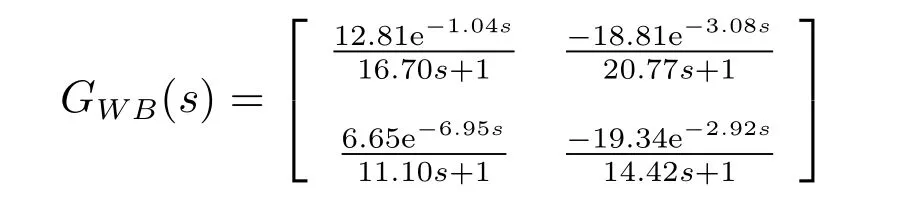
各个子系统辨识模型与实际模型的均方误差E如表1所示.

表1 Wood-Berry模型辨识结果的均方误差Table 1 Mean square error of the Wood-Berry model
文献[20]与文献[25]均为基于精确模型的自抗扰解耦算法,所以这里在精确模型的前提下,将本文的算法与文献[20]和文献[25]的算法作比较,检验逆解耦的解耦性能以及改进ESO后的ADRC控制效果,然后再将辨识数据运用到本文的自抗扰解耦算法中,验证在模型有误差下控制算法的鲁棒性.文献[20]在不解耦的情况下使用3个ADRC控制器实现对Wood-Berry模型的控制,称为3-ADRC方法,文献[25]利用逆解耦方法对模型进行解耦,然后通过ADRC进行控制,称为ID-ADRC方法,本文在逆解耦的基础上,针对时滞系统设计的ADRC控制器,称为ID-TDADRC方法.仿真实验中,在0秒和100秒分别对模型的两个通道设置单位阶跃的参考信号,并在200秒对两通道模型输入处加入幅值为0.1的阶跃扰动,用以检测三种方法的控制效果和抗扰性能.仿真结果如图2所示,上下两幅图分别是模型输出1和输出2的两通道控制效果,表2为各输出通道IAE指标以及总和的比较.从仿真结果中,我们可以看出ID-ADRC方法和本文方法对被控对象进行了解耦,所以输出通道之间几乎没有耦合影响,而3-ADRC方法仅靠ADRC控制器对耦合进行抑制,控制效果不如加入解耦器的ID-ADRC方法和ID-TDADRC方法.由于被控对象存在时滞,传统ADRC方法的观测器带宽受到限制,导致系统的跟踪速度和抗扰能力降低.本文通过改进ESO,观测器可以获得更大的带宽,更好估计系统总扰动,整个系统的响应速度和抗扰性能都较ID-ADRC方法大大提高.所以本文控制效果和抗扰性能具有一定优势.

表2 三种算法IAE指标对比Table 2 Comparison of IAE for three methods
假设模型不知道的前提下,利用本文的辨识数据设计逆解耦器和ADRC控制器.在仿真条件不变的情况下,系统的控制效果如图3、图4和表3所示.由于辨识参数与实际参数有偏差,解耦效果会不彻底,通道间存在相互影响,这里利用ADRC控制器可以观测出扰动,并及时消除.

图2 三种方法跟踪轨迹以及抗扰性能Fig.2 Tracking and disturbance rejection performance of three methods
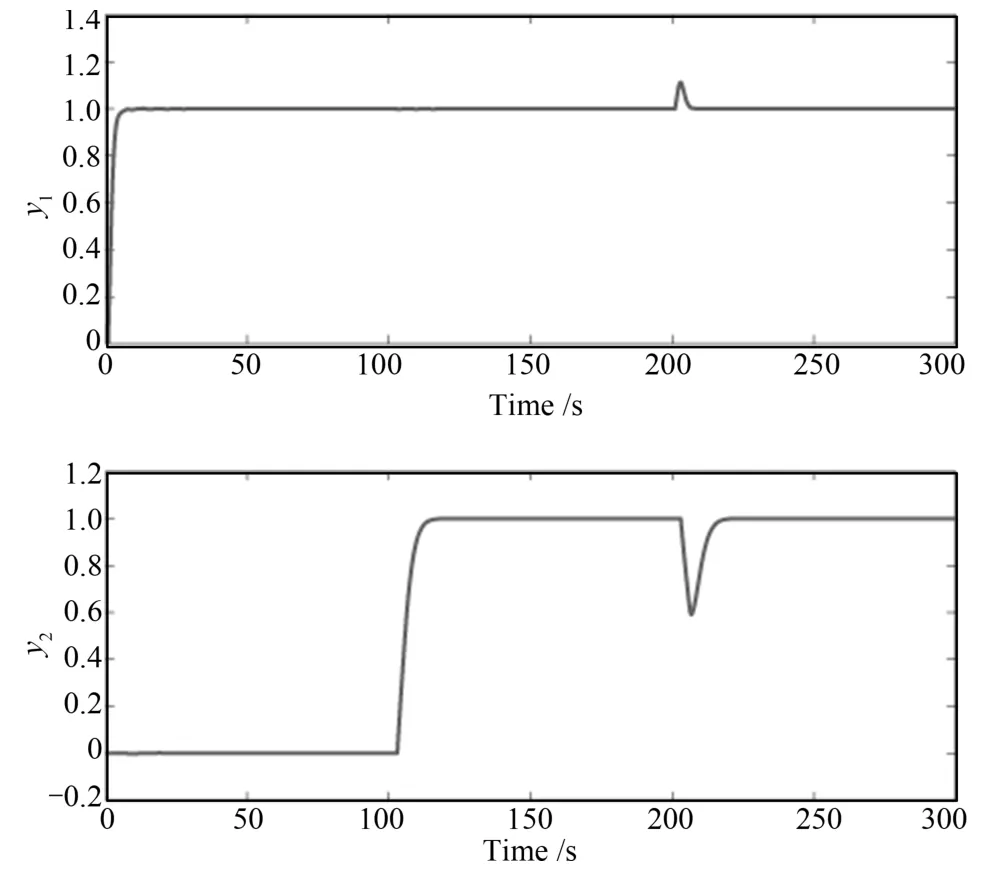
图3 采用NSR=1%下辨识数据控制效果Fig.3 Control effect by using identi fication data of NSR=1%
4.2 Ogunnaike-Ray模型
在NSR=1%环境下得到的辨识结果为:

在NSR=10%环境下得到的辨识结果为:
各个子系统辨识模型与实际模型的均方误差如表4所示.
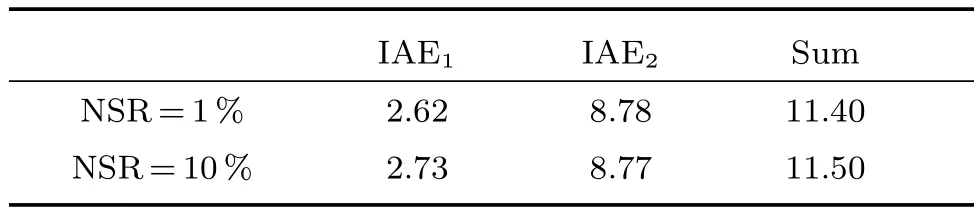
表3 采用辨识数据控制下的IAE指标Table 3 IAE by using identi fication data

图4 采用NSR=10%下辨识数据控制效果Fig.4 Control effect by using identi fication data of NSR=10%
与上节类似,将本文的算法与文献[20]和文献[25]的算法作比较,检验逆解耦的解耦性能以及改进ESO后的ADRC控制效果.然后再利用本文的辨识数据设计逆解耦器和ADRC控制器.仿真实验中,在0秒、50秒和200秒分别对模型的三个通道设置单位阶跃的参考信号,并在350秒对三通道模型输入处加入幅值为0.1的阶跃扰动.三种算法的控制效果比较如图5所示,各输出通道IAE指标以及总和的比较如表5所示.从图5和表5可以看出本文所提出的方法在解耦效果和扰动抑制方面具有一定优势.
利用本文的辨识数据设计逆解耦器和ADRC控制器.仿真参数同上,控制效果如图6和图7所示,IAE性能指标如表6所示.从图5、图6和表6中可以看出,当噪声较小时,模型参数精确时,控制效果及抗扰性能出色.但当噪声增大,辨识参数出现偏差时,解耦效果受到影响.尤其为系统解耦后的第三通道为二阶系统,当模型参数辨识不准确时,受其他两通道影响明显,ADRC控制器需要150秒左右消除受影响后发生的振荡.
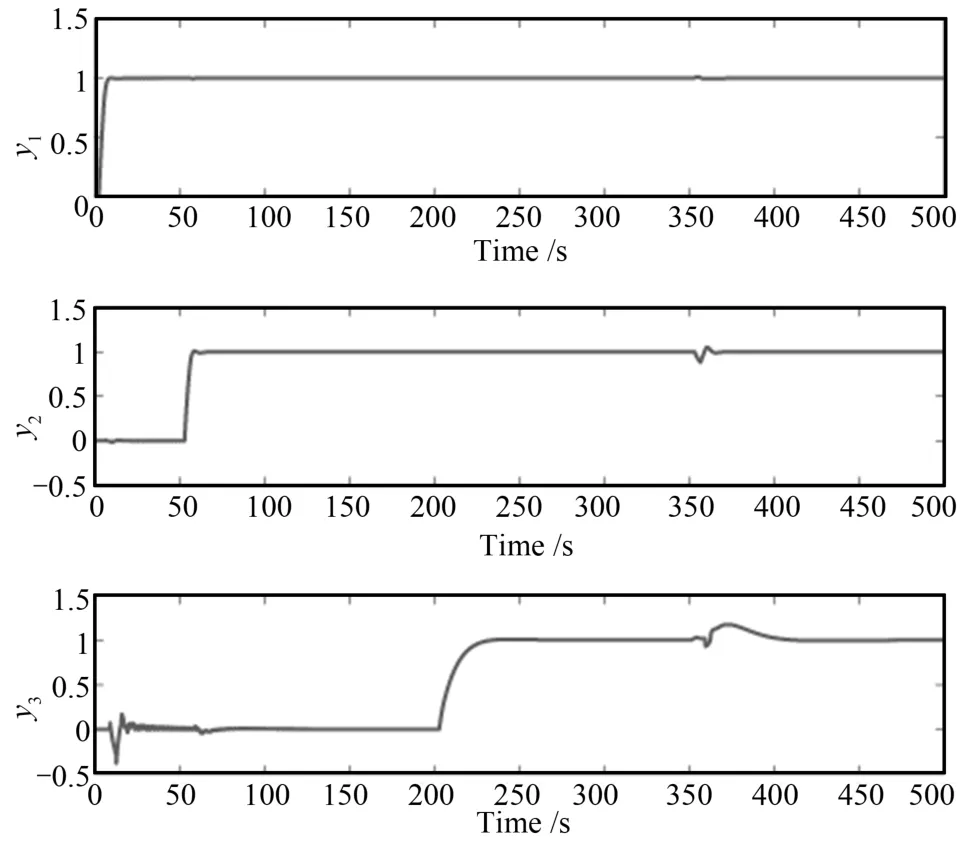
图6 采用NSR=1%下辨识数据控制效果Fig.6 Control effect by using identi fication data of NSR=1%

表5 三种算法IAE指标对比Table 5 Comparison of IAE for three methods
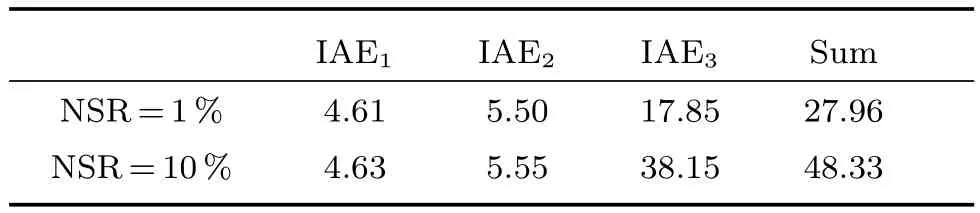
表6 采用辨识数据控制下的IAE指标Table 6 IAE by using identi fication data

表4 三种算法IAE指标对比Table 4 Comparison of IAE for three methods
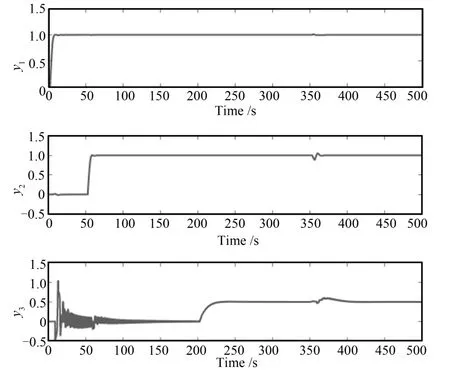
图7 采用NSR=10%下辨识数据控制效果Fig.7 Control effect by using identi fication data of NSR=10%
5 结论
本文以精馏塔的Wood-Berry模型和Ogunnaike-Ray模型为例,通过模型在时域上进行积分变化,将系统辨识问题转化为最小二乘问题求解.利用辨识出的参数设计基于逆解耦技术的解耦器,将模型的传递函数矩阵转化为对角矩阵.并对解耦后三个通道设计自抗扰控制器,针对时滞系统,通过改进ESO,增大观测器带宽,获得更好的控制效果.最后通过仿真实验,证明本文方法的有效性,针对Ogunnaike-Ray模型第三通道在辨识参数存在误差时,控制效果不是十分理想的问题,今后工作中可以考虑将ADRC中的比例控制器更换为先进控制器,进一步提高控制器的控制性能,及时消除模型不准确带来的影响.
1 Wood R K,Berry M W.Terminal composition control of a binary distillation column.Chemical Engineering Science,1973,28(9):1707−1717
2 Rake H.Step response and frequency response methods.Automatica,1980,16(5):519−526
3 Unbehauen H,Rao G P.Identi fication of Continuous Systems.Amsterdam,Netherlands:North-Holland,1987.
4 Gustavsson I.Survey of applications of identi fication in chemical and physical processes.Automatica,1975,11(1):3−24
5 Wang Y G,Cai W J,Ge M.Decentralized relay-based multivariable process identi fication in the frequency domain.IEEE Transactions on Automatic Control,2003,48(5):873−878
6 Bi Q,Cai W J,Lee E L,Wang Q G,Hang C C,Zhang Y.Robust identi fication of first-order plus dead-time model from step response.Control Engineering Practice,1999,7(1):71−77
7 Wang Q G,Zhang Y.Robust identi fication of continuous systems with dead-time from step responses.Automatica,2001,37(3):377−390
8 Wang Q G,Guo X,Zhang Y.Direct identi fication of continuous time delay systems from step responses.Journal of Process Control,2001,11(5):531−542
9 Ahmed S,Huang B,Shah S L.Identi fication from step responses with transient initial conditions.Journal of Process Control,2008,18(2):121−130
10 Zhu Y C,Patwardhan R,Wagner S,Zhao J.Toward a low cost and high performance MPC:the role of system identification.Computers&Chemical Engineering,2013,51(14):124−135
11 Van Overschee P,De Moor B L.Subspace identi fication for linear systems:theory-implementation-applications.US:Springer,1996.
12 Lee J H.Model predictive control:review of the three decades of development.International Journal of Control,Automation and Systems,2011,9(3):415−424
13 Xi Yu-Geng,Li De-Wei,Lin Shu.Model predictive control:status and challenges.Acta Automatica Sinica,2013,39(3):222−236(席裕庚,李德伟,林姝.模型预测控制―现状与挑战.自动化学报,2013,39(3):222−236)
14 Yang Jian-Feng,Zhao Jun,Qian Ji-Xin,Niu Jian.Adaptive nonlinear model predictive control for a class of multivariable chemical processes.Journal of Chemical Industry and Engineering(China),2008,59(4):934−940(杨剑锋,赵均,钱积新,牛健.一类化工过程多变量系统的自适应非线性预测控制.化工学报,2008,59(4):934−940)
15 Wade H L.Inverted decoupling:a neglected technique.ISA Transactions,1997,36(1):3−10
16 Luan X L,Chen Q,Albertos P,Liu F.Compensator design based on inverted decoupling for non-square processes.IET Control Theory&Applications,2017,11(7):996−1005
17 Garrido J,Vázquez F,Morilla F.An extended approach of inverted decoupling.Journal of Process Control,2011,21(1):55−68
18 Garrido J,Vázquez F,Morilla F,Hgglund T.Practical advantages of inverted decoupling.Proceedings of the Institution of Mechanical Engineers,Part I:Journal of Systems and Control Engineering,2011,225(7):977−992
19 Garrido J,Vázquez F,Morilla F.Inverted decoupling internal model control for square stable multivariable time delay systems.Journal of Process Control,2014,24(11):1710−1719
20 Sun L,Dong J Y,Li D H,Lee K Y.A practical multivariable control approach based on inverted decoupling and decentralized active disturbance rejection control.Industrial&Engineering Chemistry Research,2016,55(7):2008−2019
21 Han Jing-Qing.Auto-disturbance-rejection controller and its applications.Control and Decision,1998,13(1):19−23(韩京清.自抗扰控制器及其应用.控制与决策,1998,13(1):19−23)
22 Zheng Q,Gao Z Q.Active disturbance rejection control:between the formulation in time and the understanding in frequency.Control Theory and Technology,2016,14(3):250−259
23 Zheng Q,Chen Z Z,Gao Z Q.A dynamic decoupling control approach and its applications to chemical processes.In:Proceedings of the 2007 American Control Conference(ACC007).New York,USA:IEEE,2007.5176−5181
24 Zhang Yuan,Sun Ming-Wei,Chen Zeng-Qiang.Robust design of linear active disturbance rejection decoupling control for forced-circulation evaporation system.CIESC Journal,2015,66(S2):263−270(张园,孙明玮,陈增强.强制循环蒸发系统线性自抗扰解耦控制的鲁棒设计.化工学报,2015,66(S2):263−270)
25 Tian L L,Li D H,Huang C E.Decentralized controller design based on 3-order active-disturbance-rejection-control.In:Proceedings of the 10th World Congress on Intelligent Control and Automation(WCICA).Beijing,China:IEEE,2012.2746−2751
26 Wang Li-Jun,Li Qing,Tong Chao-Nan,Yin Yi-Xin.Overview of active disturbance rejection control for systems with time-delay.Control Theory&Applications,2013,30(12):1521−1533(王丽君,李擎,童朝南,尹怡欣.时滞系统的自抗扰控制综述.控制理论与应用,2013,30(12):1521−1533)
27 Zhao S,Gao Z Q.Modi fied active disturbance rejection control for time-delay systems.ISA transactions,2014,53(4):882−888
28 Zheng Q L,Gao Z Q.On active disturbance rejection for systems with input time-delays and unknown dynamics.In:Proceedings of the 2016 American Control Conference(ACC).Boston,USA:IEEE,2016.95−100
29 Tang De-Cui,Gao Zhi-Qiang,Zhang Xu-Hong.Design of predictive active disturbance rejection controller for turbidity.Control Theory&Applications,2017,34(1):101−108(唐德翠,高志强,张绪红.浊度大时滞过程的预测自抗扰控制器设计.控制理论与应用,2017,34(1):101−108)
30 Gao Z Q.Scaling and bandwidth-parameterization based controller tuning.In:Proceedings of the 2003 American Control Conference.Denver,USA:IEEE,2003.4989−4996
31 Zheng Q,Gao L Q,Gao Z Q.On stability analysis of active disturbance rejection control for nonlinear time-varying plants with unknown dynamics.In:Proceedings of the 46th IEEE Conference on Decision and Control.New Orleans,USA:IEEE,2007.3501−3506
32 Chen Zeng-Qiang,Sun Ming-Wei,Yang Rui-Guang.On the stability of linear active disturbance rejection control.Acta Automatica Sinica,2013,39(5):574−580(陈增强,孙明玮,杨瑞光.线性自抗扰控制器的稳定性研究.自动化学报,2013,39(5):574−580)
猜你喜欢
农业工程学报(2022年13期)2022-10-09
灌溉排水学报(2022年6期)2022-07-13
化工自动化及仪表(2021年6期)2021-11-26
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
水泥工程(2020年4期)2020-12-18
电子技术与软件工程(2020年17期)2020-02-02
自动化学报(2019年6期)2019-07-23
北方工业大学学报(2019年5期)2019-03-30
自动化仪表(2017年8期)2017-08-30
中国海洋大学学报(自然科学版)(2014年6期)2014-02-28