
激光制导炸弹半实物仿真模型的校核与验证
2017-03-16 03:17张培忠郑建福宁金贵苏伟丽李仕华吴宏权
兵器装备工程学报 2017年2期
张培忠,郑建福,宁金贵,苏伟丽,李仕华,吴宏权
(1.中国白城兵器试验中心, 吉林 白城 137001; 2.白城师范学院, 吉林 白城 137001)
【装备理论与装备技术】
激光制导炸弹半实物仿真模型的校核与验证
张培忠1,郑建福1,宁金贵1,苏伟丽2,李仕华1,吴宏权1
(1.中国白城兵器试验中心, 吉林 白城 137001; 2.白城师范学院, 吉林 白城 137001)
为了检验激光制导炸弹半实物仿真模型的准确性,建立了激光制导炸弹的飞行动力学、运动学方程及其计算程序,将激光制导炸弹、激光目标模拟器、五轴转台与仿真计算机联接,构建半实物仿真系统,进行半实物仿真实验,获得仿真数据;运用制导炸弹的概念和飞行力学理论校核仿真模型的正确性;利用无人机挂载激光制导炸弹实施投弹试验,分析、对比试验数据与仿真数据,验证仿真模型的准确性。
兵器科学与技术;制导炸弹;仿真模型
在研究、设计、改进、鉴定制导炸弹的过程中,需要进行各类试验获取数据,依此不断改进设计。试验会造成炸弹样机、飞机架次以及其他方面的大量消耗,为了减少消耗,通常采用半实物仿真试验。为了保证仿真试验结果的准确性和可信度,需要对仿真模型进行校核、验证与确认。
制导炸弹一般由激光或电视导引头、前过渡舱、侵彻战斗部、引信、尾部控制舱等组成。为了进行仿真试验,需要用数学方程式建立仿真模型,制导炸弹仿真模型包括4个模块:导引头系统模块、弹体运动学和动力学系统模块、弹体与目标相对运动模块和制导控制系统模块。在半实物仿真试验中,导引头系统、制导控制系统都是利用了制导炸弹实物,而弹体运动学和动力学系统模块、弹体与目标相对运动模块则利用计算机解算[1],半实物仿真原理如图1所示。
图1 制导炸弹半实物仿真原理
1 仿真建模
1.1 坐标系定义
利用4种经典坐标系建模:弹体坐标系Ox1y1z1、地面坐标系Axyz、弹道坐标系Ox2y2z2、速度坐标系Ox3y3z3(文中符号均采用弹箭飞行动力学的通用符号,下文同)。各个坐标系之间的转换关系也是经典的[2]。
1.2 制导炸弹受的力和力矩

1.3 制导炸弹飞行动力学、运动学方程
弹体质心动力学方程[4]
(1)
弹体绕质心转动的动力学方程[4]
(2)
弹体质心的运动学方程[5-6]
(3)
弹体绕质心转动的运动学方程
(4)
角度换算关系
sinβ=cosθ(cosγsin(ψ-ψv)+ sinϑsinγcos(ψ-ψv))-cosϑsinγsinθ
sinα=(cosθ(sinϑcosγcos(ψ-ψv)- sinγsin(ψ-ψv))-sinθcosϑcosγ)/cosβ
sinγv=(cosαsinβsinϑ-sinαsinβcosγcosϑ+ cosβsinγcosϑ)/cosθ
弹体—目标相对运动方程组
2 仿真模型校核
运用理论检查和确定仿真模型是否正确表达了概念模型也就是仿真计算程序是否符合概念模型的数理理论、逻辑理论,实现仿真模型校核[7,8]。以某外贸型激光制导炸弹进行半实物仿真试验。在半实物仿真实验室中,将激光制导炸弹的导引头、弹控计算机、GPS制导、惯性导航、舵机等所有部件接入半实物仿真回路,如图2所示。调试弹道计算程序、仿真控制程序。依据仿真试验大纲进行半实物仿真试验,获得炸弹的速度、角速度、炸弹的坐标、弹道角、姿态角、攻角、侧滑角、速度倾角等仿真数据,如图3~图6所示。

图2 半实物仿真实验室
图3 激光制导炸弹速度仿真数据

图4 激光制导炸弹弹道仿真数据
图5 激光制导炸弹弹道角仿真数据
图6 激光制导炸弹姿态角仿真数据
制导炸弹借助于飞机、无人机投放,当它离开飞机、无人机以后,靠自身惯性、重力飞行,没有火箭推力,也不作旋转运动,因此在无侧风作用时,其运动过程中只有向前飞、向下降落的速度,仿真计算的制导炸弹的位移、速度、姿态角也与制导炸弹的动力学、运动学理论相符合。当导引头控制舵片偏转以修正视线角时,炸弹有较小的偏航速度,没有滚转角速度,相应地偏航位移、偏航角、滚转角就很小,甚至为0,表明姿态角收敛,保证了目标始终处在激光导引头视场内,激光导引头一直在跟踪由模拟器产生的目标。图3~图6的结果说明仿真程序正确表达了制导炸弹概念模型,仿真程序通过了模型校核[9-11]。
3 仿真模型验证
模型验证是在仿真模型通过校核以后,进一步检验仿真模型是否准确地反映了实物系统构思、假设、情景、现象,尤其要通过实验、试验手段检查仿真模型的输出是否与实物系统、构思、假设、情景、现象的输出一致[7,8]。利用某型无人机挂载某外贸型激光制导炸弹进行验证,见图7。利用经纬仪测试制导炸弹飞行轨迹,在激光制导炸弹上安装遥测装置,并由遥测车收集制导炸弹速度、姿态角数据。依据飞行试验大纲,进行激光制导炸弹的投弹试验,获得了炸弹的飞行速度(见图8)、飞行轨迹(见图9)和飞行姿态角(见图10),测试脱靶量。依此数据与仿真数据对比,验证仿真模型。

图7 某型无人机挂载激光制导炸弹
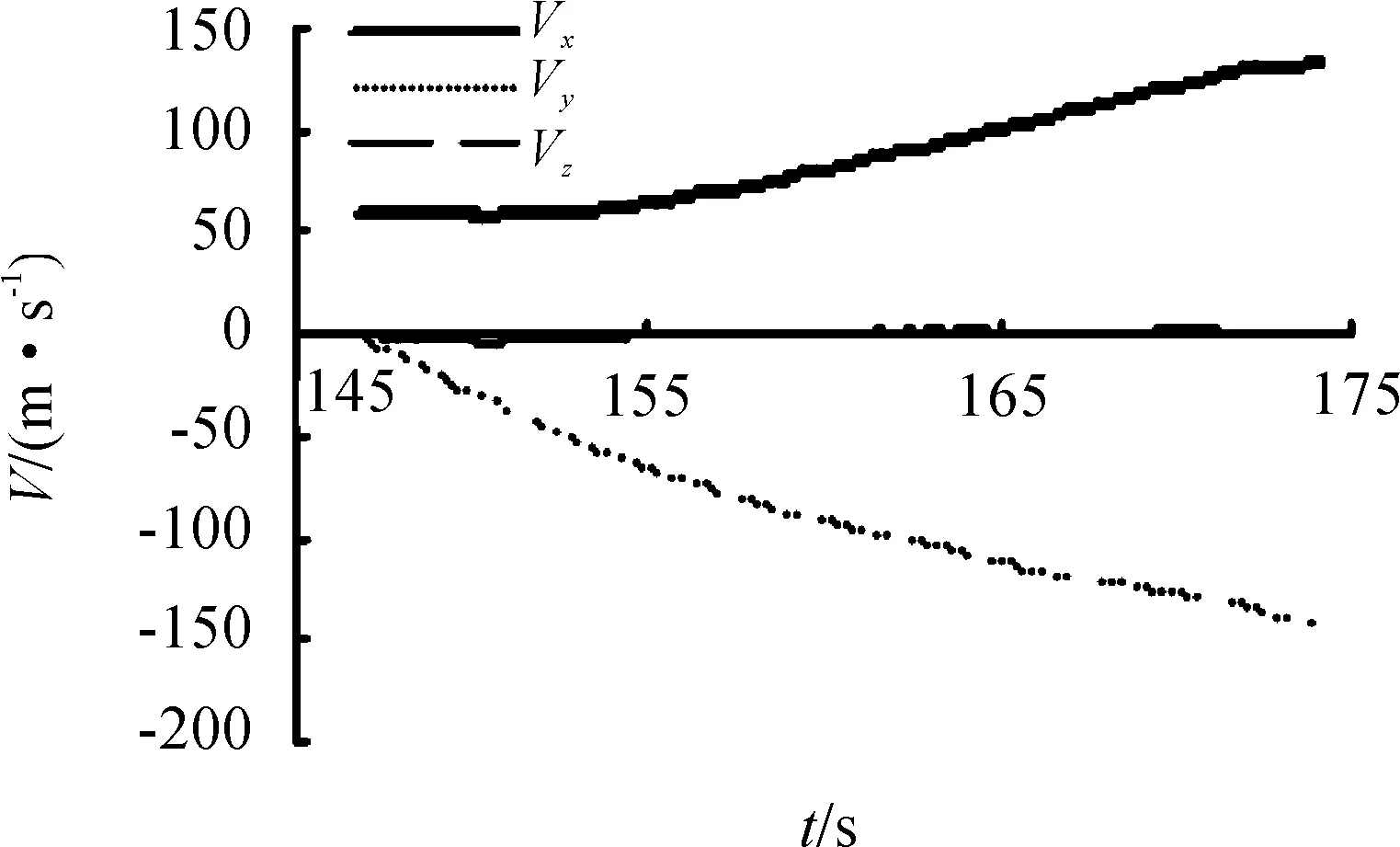
图8 激光制导炸弹速度实测数据
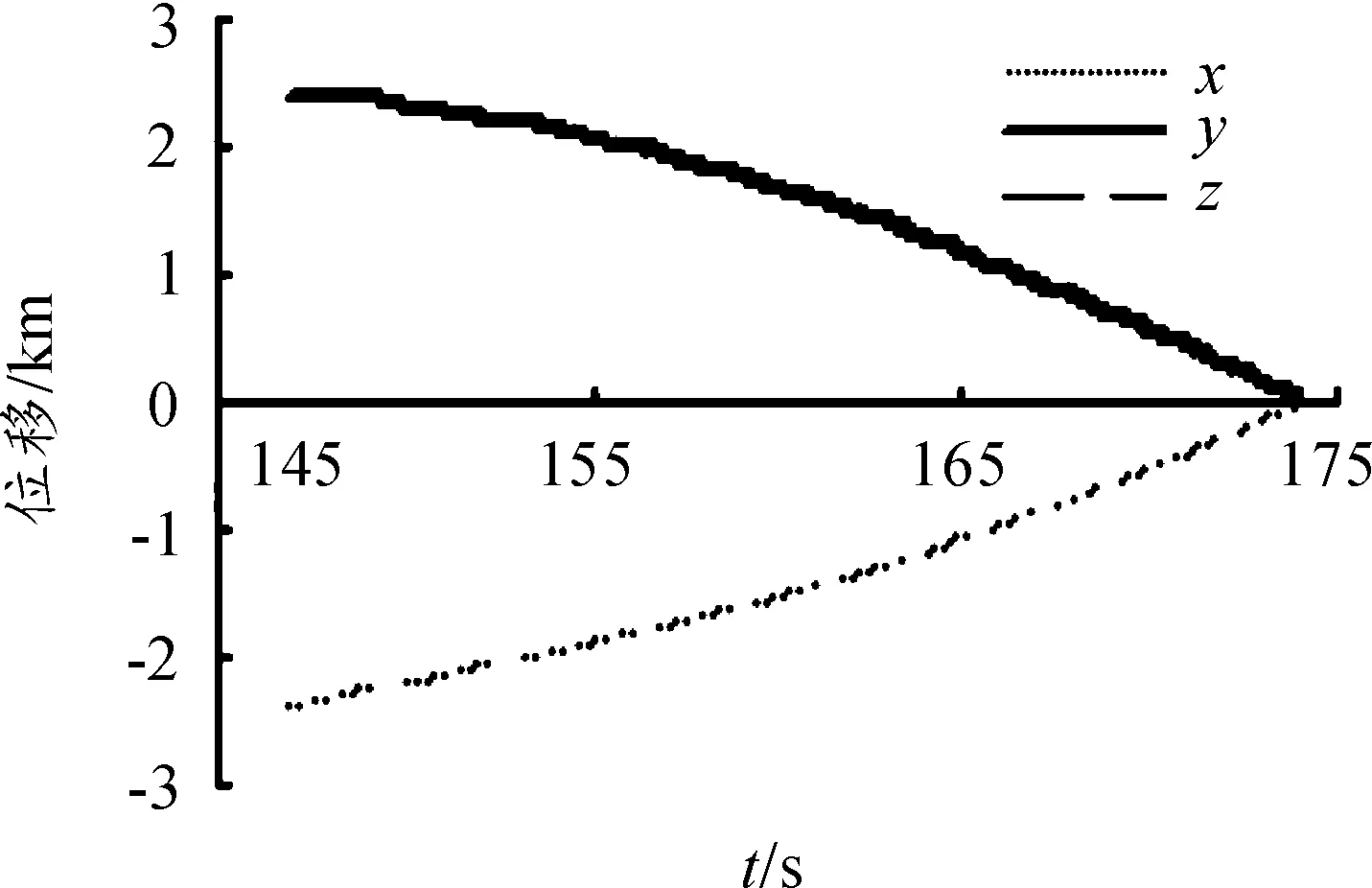
图9 激光制导炸弹弹道实测数据
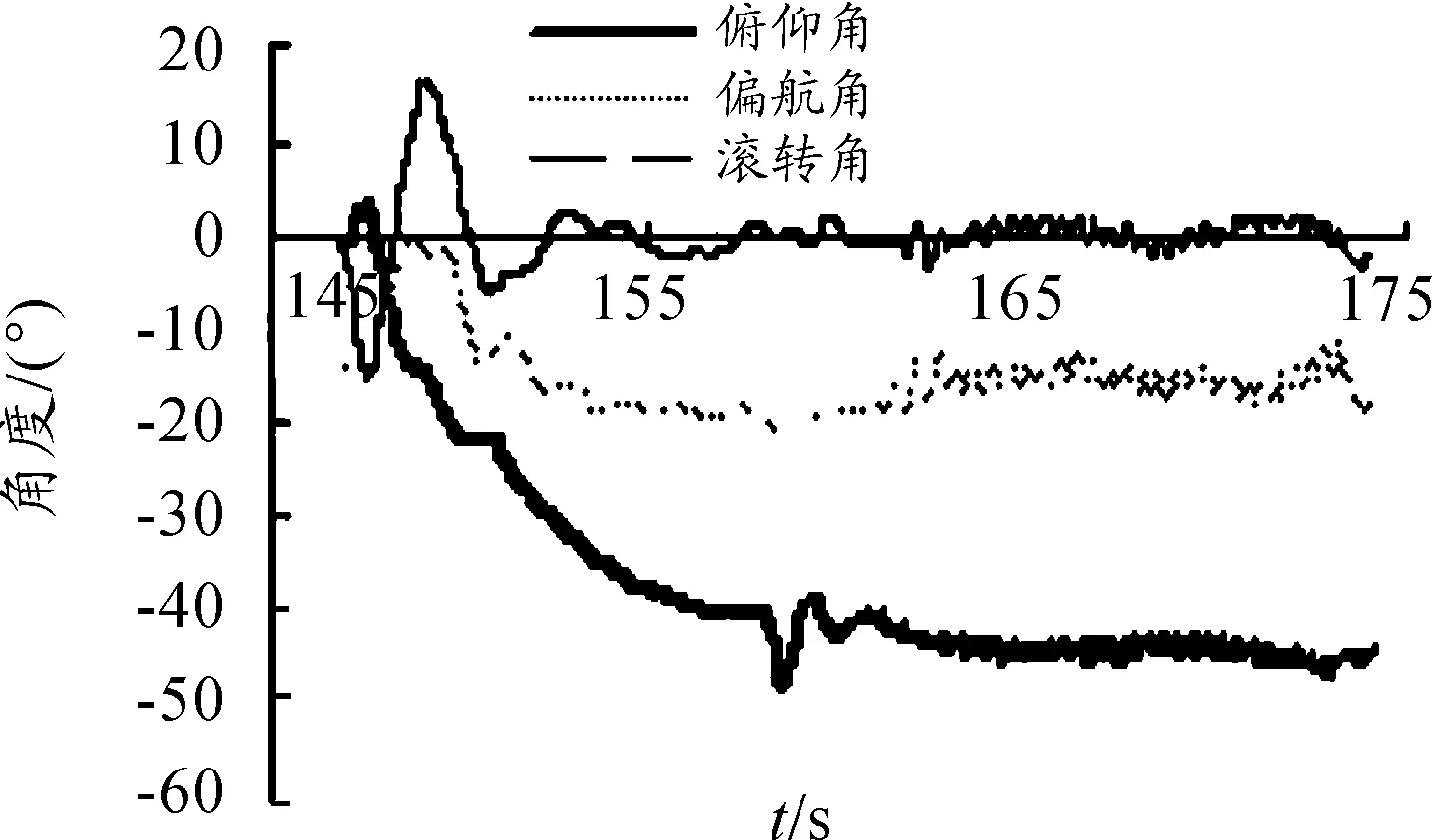
图10 激光制导炸弹姿态角实测数据
从图11(a)、图11(b)可以看出,不同投弹高度、速度、抛射角的条件下,各条仿真弹道均无脱靶,实际试验结果也是炸弹命中了目标。从图6、图10显示的制导炸弹姿态角仿真与测试结果表明,制导炸弹的姿态角处于收敛状态,激光导引头始终跟踪目标、炸弹击中目标。图12显示的制导炸弹飞行速度仿真与测试结果基本一致。试验结果验证了仿真模型[12-13]。
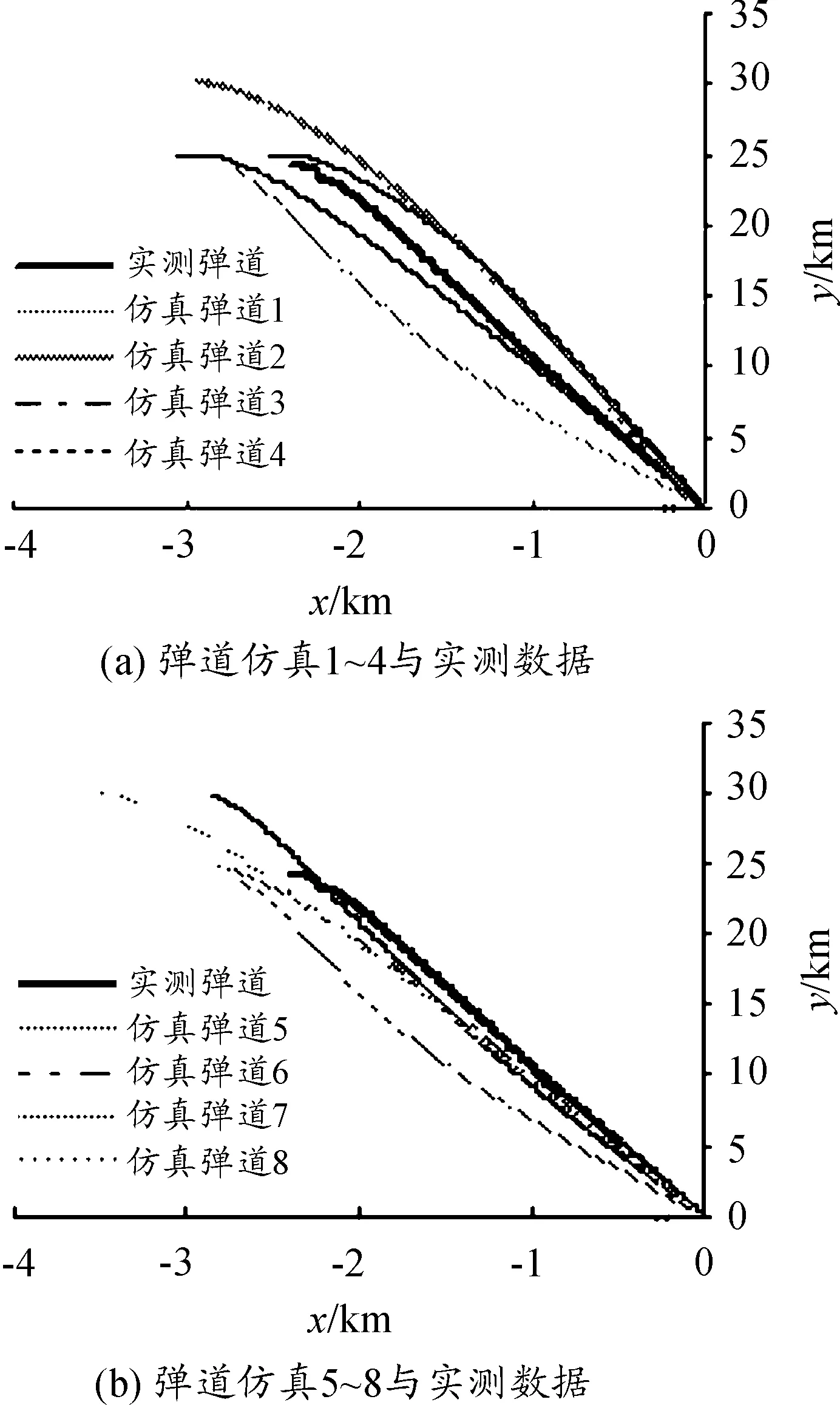
图11 弹道仿真与实测数据
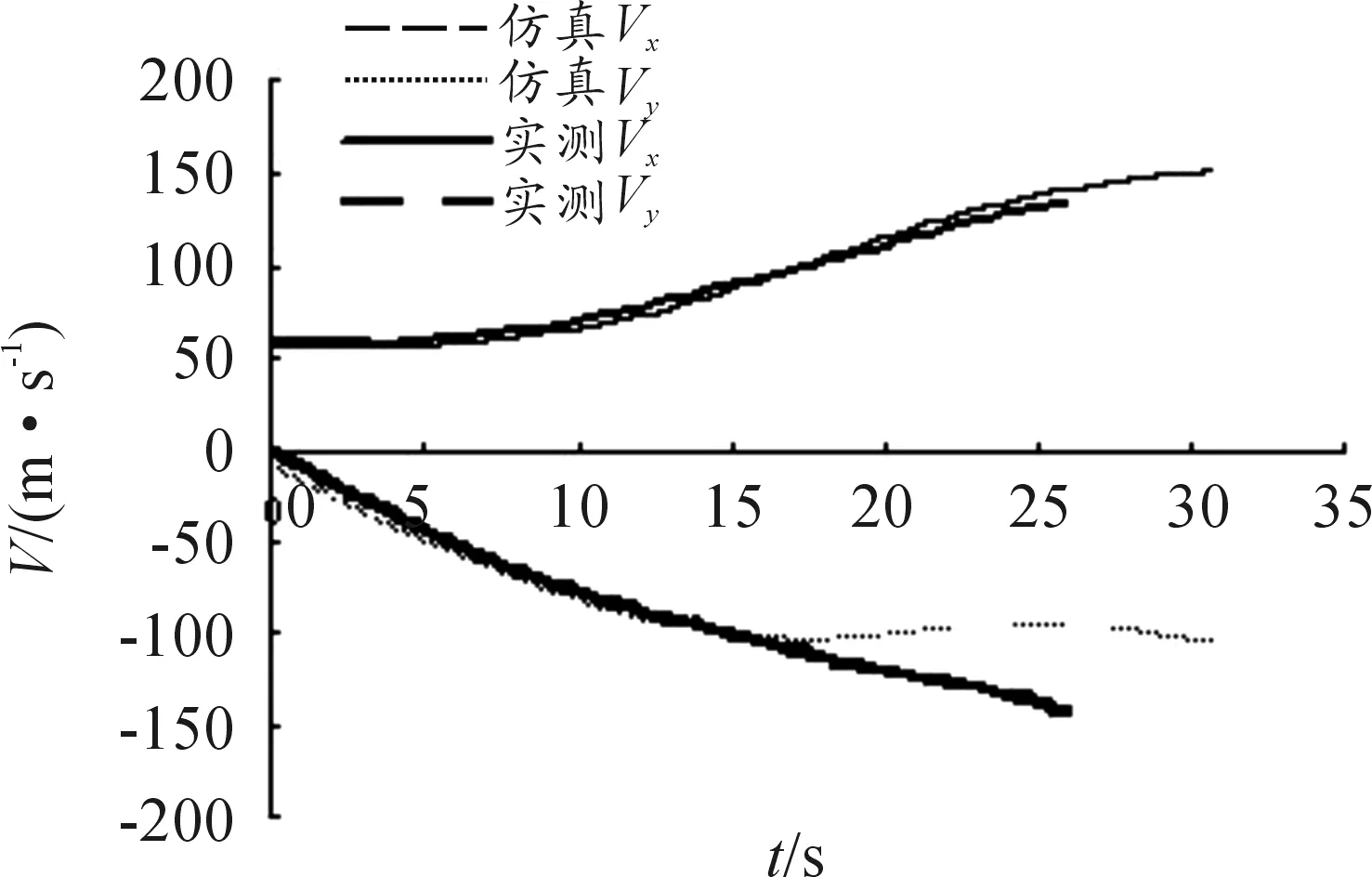
图12 速度仿真与实测数据
4 结论
建立了激光制导炸弹仿真模型,对某外贸型激光制导炸弹进行了半实物仿真试验,获得仿真数据校核模型,利用无人机挂载激光制导炸弹进行投弹试验,获得飞行实测数据,验证了仿真模型。通过研究得出以下结论:
1) 利用半实物仿真试验获得制导炸弹的位移、速度、姿态角仿真数据,可以从概念上、理论上检查仿真程序,校核仿真模型概念、理论的正确性;
2) 利用制导炸弹飞行试验获得炸弹的位移、速度、姿态角实测数据,可与仿真数据比较、分析,检查仿真程序计算结果的准确性;
3) 通过制导炸弹投弹试验获得脱靶量,与仿真计算的脱靶量一致,验证了仿真模型。
[1] 单家元.半实物仿真[M].北京:国防工业出版社,2008.
[2] 袁子怀.有控飞行力学与计算机仿真[M].北京:国防工业出版社,2001:67-73.
[3] 韩子鹏.弹箭外弹道学[M].北京:北京理工大学出版社,2008:127-143.
[4] 钱杏芳.导弹飞行力学[M].北京:北京理工大学出版社,2008:28-48.
[5] 吴宏权.基于预报误差的模型参数辨识仿真研究[J].系统仿真学报,2013(4):920-936.
[6] WU Hongquan.Error modeling and simulation foe directional testing of block[Z].SIMUL TECH,2015:461-468.
[7] 焦鹏.炸弹制导仿真系统VV-A理论和方法研究[D].长沙:国防科技大学,2010.
[8] 刘藻珍.系统仿真[M].北京:北京理工大学出版社,1998:193-203.
[9] 郭师虹,杨宝民.仿真可信性分析新方法研究[J].西安建筑科技大学学报(自然科学版),2001,33(3):271-273.
[10]李鹏波,张金槐,LiPengbo,等.仿真可信性的研究综述[J].计算机仿真,2000,17(4):12-14.
[11]金振中,向杨蕊.武器系统仿真结果可信性分析及其应用[J].系统仿真学报,2009,21(12):3599-3602.
[12]HE Chi.Design of firing impulse simulation and analysis of its key technology.SIMUL TECH,2015:453-460.
[13]李鹏波.仿真可信性及其在炸弹系统一体化研究中的应用[D].长沙:国防科学技术大学,1999.
(责任编辑 周江川)
Verifying and Validating Hardware-in-the-Loop Simulation Model of Laser Guided Aerial Jamming
ZHANG Pei-zhong1, ZHENG Jian-fu1, NING Jin-gui1,SU Wei-li2, LI Shi-hua1, WU Hong-quan1
(1.Ordnance Test Center of Baicheng China, Baicheng 137001, China;2.Baicheng Normal University, Baicheng 137001, China)
In order to check the accuracy of the hardware-in-the-loop simulation model of laser guided aerial jamming, the flying dynamics equations, kinematics equations and computing program of laser guided aerial jamming were established. The laser guided aerial jamming, laser target simulator, five-axis were conjunct in the simulating loop. The flying dynamics equations and kinematics equations computing software were input in simulating computer. By the hardware-in-the-loop simulation, the simulating results were gotten. Beyond the concept of guided aerial jamming and the theory of flying dynamic, the simulation model was verified. In the flying projecting test, a laser guided aerial jamming was projected from pilot-less aircraft. Comparing the test results with simulating results, the accuracy of the hardware-in-the-loop simulation model was validated.
ordnance science and technology; guided aerial jamming; simulation model
2016-09-30;
2016-10-25
张培忠(1966—),男,博士,研究员,主要从事火炮、自能动武器与弹药工程研究,E-mail:zhangpeizhong9966@163.com。
10.11809/scbgxb2017.02.003
张培忠,郑建福,宁金贵,等.激光制导炸弹半实物仿真模型的校核与验证[J].兵器装备工程学报,2017(2):9-12.
format:ZHANG Pei-zhong, ZHENG Jian-fu, NING Jin-gui,et al.Verifying and Validating Hardware-in-the-Loop Simulation Model of Laser Guided Aerial Jamming[J].Journal of Ordnance Equipment Engineering,2017(2):9-12.
O303;TJ413+.2
A
2096-2304(2017)02-0009-04
猜你喜欢
大电机技术(2022年5期)2022-11-17
舰船电子工程(2019年10期)2019-11-13
兵器装备工程学报(2019年10期)2019-11-08
空天防御(2019年3期)2019-08-23
船舶标准化工程师(2019年4期)2019-07-24
火力与指挥控制(2019年6期)2019-07-20
科学与财富(2019年4期)2019-04-04
大陆桥视野·下(2016年3期)2016-05-05
工业设计(2015年7期)2015-10-21
专用汽车(2015年7期)2015-03-01
