针对主动浮标的阵型优化方法
2017-03-21 01:33孙启豪蔡爱华丁海兰何建伟刘金荣李岩檐
中国电子科学研究院学报 2017年5期
孙启豪,蔡爱华,丁海兰,何建伟,刘金荣,李岩檐
(1.电子科技大学,四川 成都 611731;2.中国电子科学研究院,北京 100041)
0 引 言
在反潜作战中,声纳浮标是一种重要的反潜探测设备。针对不同的搜潜情况所采用相应的浮标阵型[3-6]。对于主动浮标,在实际情况中,浮标的搜潜距离根据潜艇航向与浮标位置点夹角的不同而有所差异。目前针对主动浮标这种特性进行阵型优化的研究文献较少,文章针对主动浮标的这种性质提出了一种阵型优化方法,并论述了其合理性。
1 潜艇位置散布规律及对应的常见阵型
在执行应召搜潜任务时,主要分两个方向讨论潜艇的位置散布。分别是敌潜艇速度未知,航向未知和敌潜艇速度已知,概略航向已知。

(1)

(2)
故在潜艇速度未知,航向未知的情况下,概率密度呈中心对称分布,此时宜采用中心对称的搜索阵型。常见的圆形包围阵如下图。

图1 圆形包围阵

(3)
当已知潜艇速度,则潜艇位置的距离散布概率密度函数为:
(4)
因为已知概略航向α,按照“3σ”原则,故认为航向误差服从正态分布,其标准偏差为σθ=Δα/3,得出航向散布的概率密度为:
(5)
故:
φ(r,θ)=φr(r)φθ(θ)
(6)
所以潜艇速度未知,航向已知的情况下,概率密度呈方向性轴对称分布。此时宜采用轴对称的拦截搜索阵型。常见的弧线拦截阵和直线拦截阵示意如下:

图2 弧线拦截阵与直线拦截阵
2 主动浮标搜潜距离与潜艇航向之间的关系
在现实搜潜任务中。主动浮标声脉冲信号的入射方向和潜艇航向的夹角会影响回波信号的强度,即影响主动浮标的搜潜距离。故在实际情况中,主动浮标的搜潜距离会随着潜艇航向与浮标点之间的夹角变化而变化,并不是一个规则的圆形。当潜艇航向与浮标点之间夹角呈90度时,搜潜距离达到理论的最大值。而当潜艇航向与浮标点处于同一条线上时,搜潜距离急剧下降以致难以发现潜艇。浮标的搜潜半径根据潜艇航向的不同呈现“蝴蝶”的形状。潜艇的目标强度和入射波的弦角的关系如下图所示[2]:

图3 潜艇目标强度和入射弦角的关系
如图4,当潜艇航向与浮标点呈90°或270°角时(A,C方向),主动浮标可达到理论最大搜潜半径。而当潜艇航向与浮标点呈0度或180度角时(B,D方向,即正对浮标点航行或背对浮标点逃逸)。搜潜距离极大下降,此时容易产生漏警的情况。

图4 潜艇航向相对浮标点的方向
为便于研究,在仿真分析中,通常采用潜艇航向与浮标点位置的夹角的不同来界定浮标的搜潜距离。在本文中,采用潜艇航向与浮标点位置夹角呈0° ~15°,165°~180°时,主动浮标无法搜索到潜艇;夹角呈15°~75°,105°~165°时,主动浮标的搜潜距离只有最大搜潜半径的一半;夹角呈75°~105°时,主动浮标达到最大搜潜距离。如图:

图5 潜艇航向与浮标点的夹角所对应的搜潜距离
3 用“浮标组”优化主动浮标阵型
根据上文讨论的理想阵型在主动浮标搜潜中的缺陷,当潜艇正对浮标点航行时将很有可能无法搜索到潜艇。所以需要对主动浮标的这种特性进行优化。为了研究方便,考虑极端情况下搜索不到潜艇的可能。即总是考虑当潜艇航向与浮标位置点呈90°或270°角时搜索潜艇。
为了解决这个问题,本文提出两个浮标做为一个浮标组,这两个浮标分别过对方的圆心。如图:

图6 浮标组
此时的临界状态是潜艇正对A浮标航行,A浮标无法发现潜艇,而通过如此布阵,敌潜艇航路一定与B浮标搜潜圆域相切(如图7所示),且航向与B浮标位置点呈90度,B浮标对潜艇达到理论搜潜的最大距离,经过一定时间潜艇将会被发现。
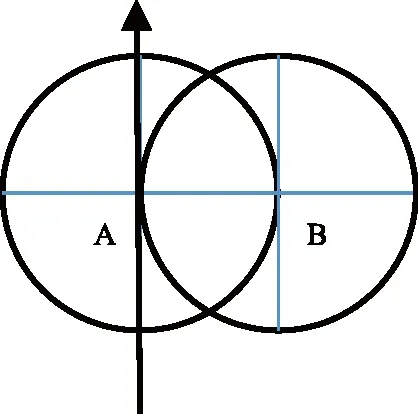
图7 潜艇正对A浮标航行且与B浮标搜潜圆域相切
而当潜艇以其它方向进入A浮标时其弦心距d必然小于浮标的搜潜半径,经过一定时间会被浮标搜索到(如图8所示)。

图8 潜艇以其它方向进入浮标搜潜区域时的弦心距
故通过采用这种浮标组的方式能有效的提高搜潜概率。下面给出直线阵和包围阵的优化示例。
直线阵的布设可以采取这样的浮标组相切的方式。如图9,在极端情况下,潜艇会从B与C的切点经过,此时浮标B与浮标C都能搜索到潜艇。而当潜艇以其它航向进入浮标阵时,其弦心距一定小于浮标的最大搜潜半径。故经过一定的时间潜艇位置将满足主动浮标的搜潜条件而被搜索到。
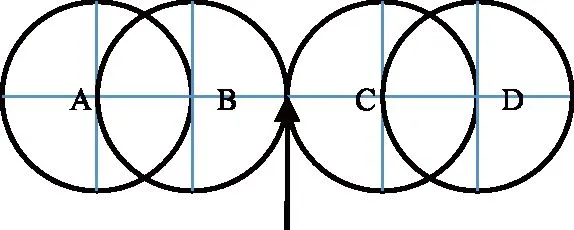
图9 直线拦截阵的优化阵型
下面给出包围阵的优化方式:
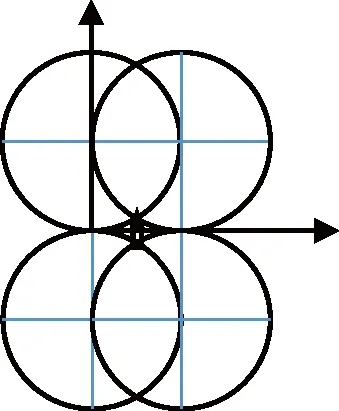
图10 包围阵的优化阵型
与直线阵同理,在这种阵型下,不论潜艇以何种角度航行,在理论上经过一定的时间潜艇位置将满足主动浮标的搜潜条件而被搜索到。可以避免因为主动浮标的搜潜特性而产生的漏警。
4 仿真分析
以4枚主动浮标包围阵为例,设潜艇初始位置散布服从正态分布,潜艇航速服从瑞利分布,利用蒙特卡洛方法求时间t(布阵时间与延迟时间之和)时的搜潜概率。
浮标的搜潜半径假定为4 km,采用潜艇航向与浮标点位置夹角呈0° ~15°,165° ~180°时,主动浮标无法搜索到潜艇;夹角呈15° ~75°,105° ~165°时,主动浮标的搜潜距离只有最大搜潜半径的一半;夹角呈75° ~105°时,主动浮标达到最大搜潜距离。设定仿真次数为50给出图例如下:

图11 图例
红色小圆表征t时刻未被主动浮标搜索到的潜艇的位置。蓝色小方块表征t时刻成功被主动浮标搜索到的潜艇的位置。小圆小方块上的直线表征时刻t该潜艇的航向。大圆表示主动浮标的最大搜潜区域。
设定抽样次数为5 000次,普通主动浮标包围阵的仿真结果图为:

图12 普通包围阵的仿真结果图
t时刻搜潜概率算得约为27%。
采用浮标组优化后的主动浮标包围阵的仿真结果图为:

图13 浮标组优化后的仿真结果图
t时刻搜潜概率算得约为44%。可见采用浮标组优化后的阵型搜潜概率提升十分明显。
5 考虑主动浮标的搜潜盲区时的情况
在实际情况中,主动浮标的中心是存在一个搜潜盲区的,如图:

图14 搜潜盲区
当潜艇处在盲区中时,主动浮标时无法搜索到目标的。下面给出当考虑搜潜盲区时,普通包围阵的仿真结果和利用浮标组优化后的仿真结果。
假定浮标中心存在半径为1 km的搜潜盲区,当t时刻潜艇处在搜潜盲区时浮标无法发现目标,抽样次数为5 000次。
普通浮标阵型的仿真结果图为:

图15 考虑搜潜盲区时普通包围阵的仿真结果图
t时刻的搜潜概率算得约为23%。
采用浮标组优化后的主动浮标包围阵的仿真结果图为:

图16 考虑搜潜盲区时浮标组优化后的仿真结果图
t时刻搜潜概率算得约为39%。
通过仿真结果可见,采用浮标组形式的主动浮标阵型在考虑搜潜盲区的情况下比一般的搜潜阵型搜潜概率有明显的提高。
6 结 语
本文先讨论了潜艇位置散布规律及对应的常见浮标搜潜阵型,并说明了在实际搜潜任务中,主动浮标的搜潜距离会随着潜艇航向的变换而变化。进而分析了目前常见的浮标搜潜阵型对这个特性考虑不足容易导致漏警的弊端。最后提出了一种针对主动浮标的阵型优化方法,并给出了仿真验证结果。不但完善了浮标搜潜阵型,并且为主动浮标阵型的研究提供了新的思路,对实际的阵型优化也具有相当的参考价值。
[1] 屈也频.反潜飞机搜潜效能评估与决策建模[M].北京:国防工业出版社,2011:16-49.
[2] 高学强,杨日杰,杨春英.潜艇规避对主动声纳浮标作战效能影响研究[J].系统工程与电子技术,2008,30(2):300-303.
[3] 蔡爱华,何建伟,王鹏.浮标布阵投放航线实验与误差分析[J].中国电子科学研究院学报,2016,11(1):21-24.
[4] 丛红日.声纳浮标阵搜潜效能通用仿真模型研究[J].系统仿真技术,2010,6(2):104-109.
[5] 谢振华,李林,程江涛.圆形浮标阵搜潜效能评估研究[J].舰船电子工程,2011,31(12):168-170.
[6] 秦锋,孙明太,周利辉.主动声纳浮标对纯机动规避潜艇探测效能研究[J].青岛大学学报工程技术版,2013,28(3):46-51.
猜你喜欢
中国畜禽种业(2022年8期)2022-09-17
趣味(数学)(2022年4期)2022-07-02
垂钓(2022年3期)2022-05-14
垂钓(2022年1期)2022-02-09
舰船电子工程(2021年5期)2021-06-04
小哥白尼(神奇星球)(2020年5期)2021-01-18
垂钓(2019年2期)2019-09-10
小雪花·初中高分作文(2019年2期)2019-06-27
资源再生(2017年4期)2017-06-15
为了孩子(3~7岁)(2016年5期)2016-05-14