基于嵌入式PLC运动控制器开发及其风机控制应用研究
2017-03-23 07:38王欣
科学与财富 2016年34期
关键词:控制器
王欣
(武汉工程大学邮电与信息工程学院 武汉 430073)
摘 要:随着科学技术的快速发展,机械生产自动化、智能化发展特征日益突出,将PLC运动控制器应用于风机控制当中,注重对控制系统功能进行实现。为了达到这一目标,需要对PLC运动控制系统设计情况进行较好的把握,使PLC功能得到较好的发挥,以满足风机控制实际需要。
关键词:嵌入式PLC;控制器;风机控制
前言:基于嵌入式PLC运动控制器的开发,注重对PLC系统的自动化和智能化特征进行把握,将其应用于风机控制当中,能够提升风机应用的智能化水平,从而更好地满足实际生产需要。PLC平台上实现运动控制器功能,需要对运动控制器的逻辑控制和运算功能进行把握,从而保证运动控制功能得以有效发挥。
一、嵌入式PLC结构分析
基于嵌入式PLC运动控制器开发和应用过程中,要对PLC结构进行把握,从而保证嵌入式PLC系统功能得以实现。一般来说,嵌入式PLC结构是一种开放式的结构,在PLC内核基础上,设置驱动接口,从而使用户对PLC硬件系统的应用,发挥自动化控制功能。关于嵌入式PLC结构的结构特征,具体内容如下:
第一,PLC的核心为实时内核,在进行任务调度过程中,能够使系统具有实时化的处理能力,从而保证控制系统功能和作用得到较好的发挥[1]。
第二,嵌入式PLC结构设计过程中,要对驱动程序进行把握。驱动程序的应用,主要由内核提供接口。
第三,嵌入式PLC结构在运行过程中,采取了一种梯形图程序,通过相应的运算,对系统指令进行处理。
二、嵌入式PLC運动控制器开发
在对嵌入式PLC运动控制器开发时,需要对开发流程和实现原理进行较好的把握,这样一来,才能够发挥嵌入式PLC运动控制器的功能。
(一)嵌入式PLC开发流程分析
在对嵌入式PLC开发过程中,主要从底层硬件开发、驱动开发和梯形图开发三个方面入手,其开发的关键点在于驱动程序的开发[2]。
1、PLC底层硬件设计
在对嵌入式PLC底层硬件设计过程中,要保证PLC硬件具有较为灵活的拓展性,能够根据系统运行需要,对PLC硬件进行相应调整,以保证系统性能得到较好的发挥,所以需对I/O接口进行合理的利用,对信息传输通道进行较好的分配。
2、用户驱动开发
用户驱动开发设计过程中,对于嵌入式PLC系统功能实现具有重要的影响。驱动开发采取了嵌入式PLC内核,并且借助于PLC内核,实现驱动接口连接。
驱动开发,还需要将驱动任务进行合理的分配,保证驱动运行过程中,PLC的控制功能得到较好的发挥[3]。
3、梯形图设计
在对梯形图设计时,需要针对于PLC系统工作情况,完成设计。嵌入式PLC系统开发过程中,梯形图设计关系到了PLC系统运行流程,在这一过程中,梯形图与PLC控制系统情况是否具有一致性,会对系统功能产生较大的影响。
(二)嵌入式PLC运动控制器功能实现
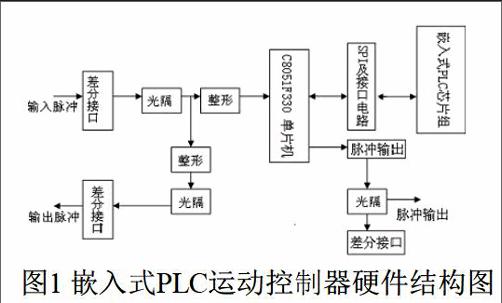
嵌入式PLC运动控制器硬件结构图如图1所示,为了保证其功能实现,需要选择有效的中央处理单元,这一过程中,可以对性能先进的单片机进行应用。例如C8051F120单片机或是8031、8096单片机等。
嵌入式PLC运动控制器功能软件实现,主要包括了三个模块,分别是位置模块、速度模块和相应的计数模块。位置模块定位过程中,主要以脉冲数量进行定位,并需要对脉冲的频率进行控制。位置模块是一种高速模块,这就需要保证高
速脉冲精确输出,通过利用C8051F120单片机和PCA阵列,可以实现其功能;速度模块功能的实现,需要对PCA阵列进行把握,该计数器以一种特定的频率进行循环技术,并且当计数值与模块数值一致的情况下,会使系统进行运动[4];计数模块功能的实现,用户会对初始频率进行指定,通过利用PCA模块,可以对脉冲频率进行较好的计算。
三、基于嵌入式PLC运动控制器在风机控制中的应用分析
嵌入式PLC运动控制器在风机控制中应用时,需要对风机驱动任务进行把握,并能将风机驱动任务进行合理分配。
通过利用接口函数和PCA可实现风机位置模块驱动开发。可以应用于风机底层硬件初始化,PCA模块则针对于I/O初始化。在进行具体设计过程中,利用非实时性的接口,风机控制过程中的底层硬件配置可以在这一接口实现。
当底层硬件配置设计完成后,需要针对于风机控制的调速接口进行设计。用户对初始频率进行指定,并对这一段内的脉冲个数进行设置,从而对该段的速度进行调节。一般来说,每一次频率线性的变化,会在PCA内进行下一次的脉冲调节,这就需要对PCA中的数值进行重新更新,且会导致CPU的消耗增大。为了解决这一问题,就需要对PCA中的任务进行合理的分配。通过利用PLC运动控制器,可以设计合理的调速方案,并对每一周期的变化值进行确定,从而保证脉冲信号的科学性和合理性。除此之外,为了保证风机控制目标实现,位置模块在设计过程中,需要利用到PLC的D寄存器和S线圈,保证控制更加灵活、可靠,以满足风机控制需要。
结论:嵌入式PLC运动控制器在应用过程中,其具有较强的灵活性,能够更好地满足控制需要。在将PLC控制系统应用于风机控制当中,要注重对位置模块、速度模块和计数模块进行较好的设计,从而保证其控制功能得到有效发挥。
参考文献
[1] 付子鑫,李璇,周纯杰. 基于嵌入式PLC的运动控制器实现[J]. 可编程控制器与工厂自动化,2015,01:29-34.
[2]《煤矿机械》2011年总目次索引[J]. 煤矿机械,2011,12:263-280.
[3] 许家忠,王东野,温武,张浩. 基于嵌入式运动控制器的钻床控制系统[J]. 自动化技术与应用,2010,10:19-21+36.
[4]《制造业自动化》2010年总目录[J]. 制造业自动化,2010,15:219-236.
猜你喜欢
煤气与热力(2021年12期)2022-01-19
通信电源技术(2016年4期)2016-04-04
应用科技(2015年5期)2015-12-09
电子设计工程(2015年13期)2015-02-27
电测与仪表(2014年8期)2014-04-04
电测与仪表(2014年3期)2014-04-04
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28
自动化博览(2014年4期)2014-02-28
自动化博览(2014年4期)2014-02-28