基于警戒区模型的空中交通管制冲突解脱程序探讨
2017-03-23 07:48吕焱
科学与财富 2016年34期
吕焱
(中国民航厦门空中交通管理站 361006)
关键词:空中交通;冲突解脱程序
近年来,随着我国经济的快速发展,民用航空运输业同步高速发展,主要表现在航班量的大幅增长,据统计全国的飞行流量每年以10%以上的速度增长。国内外航空公司如雨后春笋般涌现。在有限的空域范圍内,空中交通状况越来越复杂,空中安全形势越来越严峻,这给专门负责空中安全保障的空管系统带来了巨大的挑战。尤其最近一年来,跟民航空管相关的不安全事件频发,给每一位战斗在一线的对空管制员敲响了警钟。而对于管制员来说,熟练的掌握并执行管制冲突解除程序是保障安全的重要一环,也是保障安全的最后一根救命稻草。
1、冲突预测
在我们的日常工作中,我们是一个团队在配合工作,我们当然已经有许多互相发现,弥补,制约彼此出错的措施。但我们还是不可避免的会出现各种失误,进而触发冲突。总而言之,冲突不可避免。问题的关键是管制员该如何提早进行冲突预测。
冲突预测是管制工作中需要每时每刻都在进行的思维活动。成熟的管制员善于利用时空间隙,在飞机较少或冲突不大的情况下预先对未来某一时间段的空中交通状况进行思考,根据已获得的动态信息,如:飞机预计进入本区域边界的时间、高度以及飞机的性能,对未来可能出现的飞行冲突作出大致估计,盘算冲突的解决办法,进而为下一步决策奠定基础。
2 、冲突预测模型
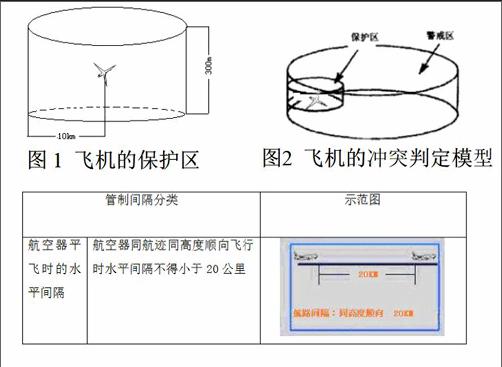
关于冲突预测一般有两种方式,一种是基于距离标准的预测方法;一种是基于时间标准的预测方法,具体采用哪种方式可以根据具体的情况来定。下面我们以在雷达管制中常用的基于距离标准的预测方法来实施预测,我们知道管制间隔标准是建立在多维空间的基础上,可以认为它是以圆柱体的形式存在于多维空间之中,飞机的移动实际上是一个圆柱体在空间的移动。因此在配置飞行间隔时,不能只考虑到水平面的间隔,而不考虑垂直的间隔,实际上管制间隔标准中的水平间隔是包含垂直间隔的。具体的模型如下所示:
以雷达间隔标准为依据,可以建立如上图所示的防撞模型,取以飞机为中心的安全间隔范围内的三维区域为飞机的“保护区”,即一个半径为10km,高为300m的圆柱体。在任何情况下,飞机的“保护区”都是绝对不允许相互重叠的。换言之,一旦“保护区”重叠,飞行冲突已经发生。
为了使管制员注意潜在的冲突,我们通常的做法是在保护区的基础上定义了比安全区更大的三维空间——“警戒区”。这样,用于飞行冲突判定的模型即为由保护区和警戒区组成的双层模型构成,见图2。
警戒区的确定各个地方有各个地方的差别,有大有小,比如说在某管制区域是按照下面的规则执行的。这个警戒区的圆柱高是300m,半径根据下面的情况而定。
警戒区对于飞行冲突能起到一个缓冲的作用,让飞机在保护区重叠前有时间来进行冲突调配。
3、冲突解脱方法
在雷达管制中,实现冲突解脱,管制员通常使用三种方法1、改变航向2、调速3、改变飞行高度层。
改变航向
改变航向实际上就是我们说的水平避让。应该遵守的避让原则:当冲突航空器处于避让航空器180°(不含)到360°方位时应指挥航空器紧急右转避让,当冲突航空器处于避让航空器0°(不含)到180°方位时应指挥航空器紧急左转避让。但军航活动或危险区等限制也应作为考虑的因素。改变航向是处理紧急冲突最常用,最有效的方式。
改变飞行高度层
目前管制员在工作时调配飞行冲突用得最多的是调配飞行高度层,在一个平面内当探测到两架飞机即将发生冲突时,可以通过改变其中一架飞机的高度来进行冲突解脱,必要的时候也可以同时对两架飞机的飞行高度进行调整,同时控制两冲突飞机的上升率或下降率来进行冲突解除。改变高度层通常用在冲突不紧急时候使用,也是比较有效,常用的方式。
调速
调速在雷达管制中效率最低,它通常用在微调间隔中,比如说控制两机的同高度间隔,落地间隔等。有时因为机型或者是环境因素,调速不能解决问题,通常管制员配合上面两种方法同事使用。机组通常也不愿意长时间被控制速度。总的来说,调速仅仅用在冲突不紧急的情况下。
4、冲突解除原则
水平避让原则:一般情况下当冲突航空器处于避让航空器180°(不含)到360°方位时应指挥航空器紧急右转避让,当冲突航空器处于避让航空器0°(不含)到180°方位时应指挥航空器紧急左转避让。但军航活动或危险区等限制也应作为考虑的因素。
垂直避让原则:根据冲突航空器的实际高度差及接近率使用“停止上升/下降”,“最大上升率上升/下降率下降”等术语,使冲突可以最快得以化解,同时应附带水平避让指令。
管制指令原则:向冲突航空器通报冲突情况包括方位距离。同时在指令中应包含能让机组感受到很紧急的词比如‘立即左/右转90度紧急避让冲突。
冲突解除在管制工作中经常碰到,要处理好需要管制经验和技术的长时间积累和磨练。这个问题的解决其实涉及到两类人员,一是管制员;二是飞行员。管制员负责发现冲突并立即发布冲突解除指令,飞行员负责配合管制员执行指令,这两个环节缺一不可。一方面管制员要尽可能的早发现冲突,为冲突解除赢得时间,并及时作出合理的预案。另一方面飞行员要听到管制指令后尽快的感受到风险并做出响应。这就要求管制员不仅要果断决策,而且在管制指令上也要简洁明了,语气上还要让飞行员感受到冲突的急迫性,让其立即配合。以下为案例分析:
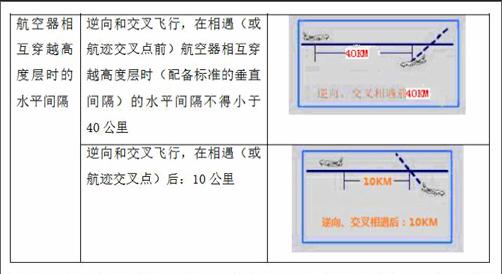
案例1 某日,航班A、B,北京时间14:50管制员指挥A从9200米下到7800米,A在14:53分保持7800米,此时航班A、B依次同向同高度飞行,两机水平间隔为40公里左右,因为接到前方管制区间隔限制需要两机拉大水平间隔,管制员指挥位于前面的航班A保持高度右转盘旋。14:58:45,当A、B两机相距约18公里时,协调席管制员发现两机存在飞行冲突,提醒管制席管制员,管制席管制员立即指挥A机左转航迹010避让,指挥B机以2000英尺/分钟的下降率下到7200米,并左转航迹180避让。14:59:29,A机左转至航向010,B机左转至航向180,B机下到高度7620米并继续下降,垂直间隔180米,水平间隔6公里。
分析:首先我们从结果看,两机的水平和垂直间隔都突破了我们在前面提到的保护区圆柱体最小间隔10公里和300米。这个结果就决定了局方对这次事件的定性。我们再看整个过程可以发现从管制员发指令到两机机组按要求执行完指令用了45秒的时间。这段时间就是前面提到的管制员的冲突预测和冲突解脱的时间,对于管制员来说极其重要。在这儿我们不管这个预案的合理性,我们只是要明白冲突解除预案合理,两机的最后的间隔就大,对我们就有利。而这个时间段的长短除了跟管制员的决策预案以及管制指令的发布有关外,跟机组的感受风险和做出响应的速度也密切相关。
结语
管制员在实际工作中,每天对着雷达屏幕要监视成百上千架飞机,随着这些飞机动态的不停变化,管制员也不停地做着很多的冲突预判,然后做出冲突解脱的方案并实施。当前随着航班量的大幅度增长,航线结构的日趋复杂,管制员肩上压力与日俱增,保障空中安全这个艰巨的任务变得越来越难。管制员对每一架飞机的动态的错漏忘都有可能造成无法挽回的危险事故。随时都有可能致管制员于万劫不复之地。所有每一个管制员必须苦练自身的管制技能,成熟自身的管制心态,熟练掌握冲突解除的各种有效措施,做到合理预案、果断指挥,冷静处理,化险为夷。争取使冲突早发现于警戒区范围之外,早化解冲突于保护区范围之外。
猜你喜欢
太原科技大学学报(2022年6期)2022-12-26
警察技术(2022年3期)2022-06-22
小天使·四年级语数英综合(2021年3期)2021-05-10
中国人民公安大学学报(自然科学版)(2019年3期)2019-10-23
新商务周刊(2018年15期)2018-12-06
航空知识(2017年2期)2017-03-17
西南石油大学学报(社会科学版)(2016年1期)2016-12-01
太空探索(2016年3期)2016-07-12
太空探索(2016年8期)2016-07-10
工业设计(2016年6期)2016-04-17