
自适应空间机动目标跟踪算法
2017-03-30 01:28林浩申刘刚何兵
中国空间科学技术 2017年1期
林浩申,刘刚,何兵
火箭军工程大学,西安 710025
自适应空间机动目标跟踪算法
林浩申,刘刚*,何兵
火箭军工程大学,西安 710025
在空间目标跟踪问题中,目标机动导致的模型不匹配问题会导致滤波算法出现滞后现象。为了对空间机动目标进行快速跟踪,在平方根容积卡尔曼滤波(Square-root Cubature Kalman Filter,SCKF)的基础上,引入强跟踪滤波(StrongTracking Filter,STF)的思想,推导得到了次优渐消因子在SCKF中的等价描述。并通过建立以矩匹配方法为基础的自适应机制,设计了兼顾滤波精确性和鲁棒性的自适应强跟踪平方根容积卡尔曼滤波(Adaptive Strong Tracking Square-root Cubature Kalman Filter,AST-SCKF)算法。仿真结果表明,在目标机动前,AST-SCKF算法和SCKF算法的位置收敛精度相差不足1%;在目标机动后,AST-SCKF算法的位置和速度的收敛精度相对SCKF算法分别提高了95.19%和30.50%,同时,其收敛速度相对SCKF算法分别提高了57.20%和24.68%。
空间目标定位;机动目标;仅测角;自适应滤波;容积卡尔曼滤波;强跟踪滤波;渐消因子;机动检测
随着空间技术的不断发展,空间目标的实时机动技术成为完成复杂空间任务的关键技术之一,因此,如何对机动目标进行快速跟踪和精确定轨成为了空间目标监视领域的核心问题。
天基观测平台凭借其不受天气、国界等因素影响的特点得到广泛的应用,其中依靠目标辐射的光学信号或无线信号等方式进行无源探测的方式,因其隐蔽性好、耗能少等优点1]成为空间监视的重要手段,因此本文重点研究天基平台无源定位问题。
在空间目标无源定位问题具有维度高和非线性强的特点,当目标不机动时,常用的扩展卡尔曼滤波(Extended Kalman Filter,EKF)、无迹卡尔曼滤波(Unscented Kalman Filter,UKF)UKF和容积卡尔曼滤波(Cubature Kalman Filter,CKF)等算法都能表现出满意的跟踪性能2],但在目标机动时,容易出现滤波算法收敛延迟以及精度不高的问题。为了解决目标机动带来的问题,文献3-4]将次优的渐消因子引入到EKF算法中,提出了强跟踪滤波(Strong Tracking Filter,STF)算法,该算法通过在线调整滤波增益矩阵,保证输出残差保持相互正交,达到提取残差中有效信息的目的,增强了算法对状态突变和参数突变的抗扰动能力,但以EKF为基础的STF算法不可避免地要计算复杂的雅克比矩阵。
文献5]中提出了一种基于UKF的强跟踪滤波器,文献6]以此为基础来产生粒子滤波中的密度函数,打破了传统强跟踪滤波算法中EKF所带来的局限性,但UKF的参数设置的难度会随着状态维度的增加而增加7],粒子滤波的计算量会随着状态维度的增加呈指数增长。近年来,基于求积容积方法的CKF算法被提出,其良好的性能使得其在姿态控制和导航等领域得到广泛应用8]。但计算机的舍入误差会导致该算法的协方差矩阵出现非对称和非正定性问题9],为了解决这一问题,文献10]提出了基于QR矩阵分解的平方根容积卡尔曼滤波(Square-root Cubature Kalman Filter,SCKF)算法。
因此本文重点研究了如何提高SCKF算法跟踪机动目标的能力,通过引入次优渐消因子增强了算法的鲁棒性,通过建立机动检测机制兼顾了算法的精确性。仿真结果表明该算法能对空间机动目标进行快速精确的跟踪,具有一定的研究和实用价值。
1 基于天基测角的空间目标被动跟踪模型
1.1 空间目标运动模型
由于地球中心的引力远大于其他作用力,通常可以采用由开普勒第一定律推导出的二体运动方程来描述航天器的运动11-12]。根据二体运动规律,在J2000.0坐标系中,目标的运动方程为
(1)

1.2 考虑地球非球形J2项摄动的运动模型
实际的空间目标运动是一个非常复杂的过程,空间目标会受到地球非球形摄动、地球大气阻力摄动、太阳光压摄动以及其他天体引力摄动12],文献13]比较了不同轨道高度上空间目标所受到各种摄动的量级水平,结果表明:J2项非球形摄动为主要摄动力,尤其是针对低轨目标。
考虑到J2项摄动,空间目标的状态微分方程为12]
(2)
式中:J2=1.082 626 1×10-3为地球引力场二阶球谐系数,Re=6 378 136.0 m为地球平均赤道半径。
1.3 考虑目标机动的运动模型
随着空间任务的日趋复杂,空间目标在线机动越来越常见,轨道机动是指航天器在控制系统作用下,依靠其动力装置,改变飞行轨道的过程14]。机动方式可按照推力的持续时间分为脉冲式机动和连续式机动。其中脉冲式机动需要优化的参数少,并有成熟便捷的Lambert转移理论支撑,得到广泛应用,因此本文仅考虑脉冲式机动,空间目标在机动时刻获得瞬时脉冲速度Δv=Δvx,Δvy,Δvz],而位置保持不变。其中,Δvx,Δvy,Δvz分别表示目标在轨道坐标系中径向、横向和法向的速度增量。
1.4 仅测角观测模型
假设天基平台通过无源探测的方式仅获得空间目标的角度信息,对俯仰角βk和方位角δk定义如下15]:
(3)


(4)

2 自适应强跟踪平方根容积卡尔 曼滤波(AST-SCKF)算法
2.1 次优渐消因子的等价描述
文献3]得出结论:但当模型状态突变时,为了保持输出残差序列的高斯白噪声特性,通过在线调整滤波增益矩阵Kk,可以迫使滤波器保持对实际系统状态量的跟踪,为了提高系统的实时性,通常采用次优算法计算渐消因子λk,次优渐消因子的推导成为了强跟踪算法的核心。文献3]中在EKF的基础上详细推导了渐消因子λk的计算方法:
(5)
(6)
(7)

本文在SCKF中引入次优的渐消因子后,需要对渐消因子重新推导计算,可以得到Nk和Mk的等价形式为
Nk=Vk-βRk-
(8)

(9)

(10)
(11)
(12)
Nk=Vk-βRk-

(13)
(14)
求得Nk和Mk后即可根据式(5)和式(6)计算渐消因子λk。
2.2 机动检测
次优渐消因子的引入,解决了空间目标机动带来的状态突变问题,但在空间目标未机动的情形下,渐消因子降低了原有SCKF算法的跟踪精度。基于空间目标机动能力和机动次数都受到燃料限制的特点,本文设计了一种基于机动检测的自适应滤波机制,其检测方式如下:
(15)
式中:S≥1表示可调阈值系数,针对不同的实际背景,需要人为设置;γk表示残差序列。若公式(15)成立,则表示目标未进行机动;否则,则表示目标进行了机动。
根据机动检测的结果,当未检测到目标机动时,滤波器保持在传统的SCKF滤波状态;当检测到目标机动行为时,滤波器切换至带渐消因子的SCKF算法状态。
2.3 算法流程设计
文献16]详细给出了SCKF算法的推导过程及滤波流程;文献3]详细给出了STF算法的推导过程及滤波流程;根据前述部分的推导,本节所提出的AST-SCKF算法的计算步骤为:
1)滤波器初始化:

(16)
若k>1,则执行步骤2)~步骤5)。
3)根据式(15)进行目标机动检测,如果检测到目标机动则进入步骤4),否则进入步骤5)。

3 仿真结果及分析
3.1 作战想定
假设高轨道的天基观测平台通过无源探测的方式获取低轨空间目标的角度信息,并对空间目标进行跟踪,而空间目标试图通过一次脉冲式的强机动摆脱跟踪。其中观测平台与空间目标的轨道六要素(半长轴、偏心率、轨道倾角、升交点赤经、近地点幅角、过近地点时刻)分别为:(10 508.1,0.000 577 8,63.244 7,231.733 5,144.160 8,0)和(6 708.9,0.000 490 3,42.782 6,66.624 8,315.370 6,0)以此为基础,通过龙哥库塔转阿达姆斯积分方法得到理论轨道数据。
3.2 参数设置
假设目标机动时刻为1 500s,在相对坐标系内的速度增量为Δv=30,30,30]m/s。

3.3 性能指标
为了准确描述算法的性能,便于算法性能的比较分析,设立如下标准:
1)均方根误差:对k时刻的均方根误差定义为
RMES (k)=
(17)

2)收敛时间:当位置的RMES连续100s低于5 km时认为位置收敛,当速度的RMES连续100s低于5 m/s时认为速度收敛。机动前的收敛时间以仿真零时刻为计时起点,机动后的收敛时间以机动时刻为计时起点。
3)收敛精度:以机动前一时刻的RMES作为机动前的收敛精度,以仿真结束时刻的RMES作为机动后的收敛精度。
3.4 仿真结果
分别采用SCKF算法和AST-SCKF算法对上述场景中的空间目标进行跟踪。仿真结果如图1~图3所示。
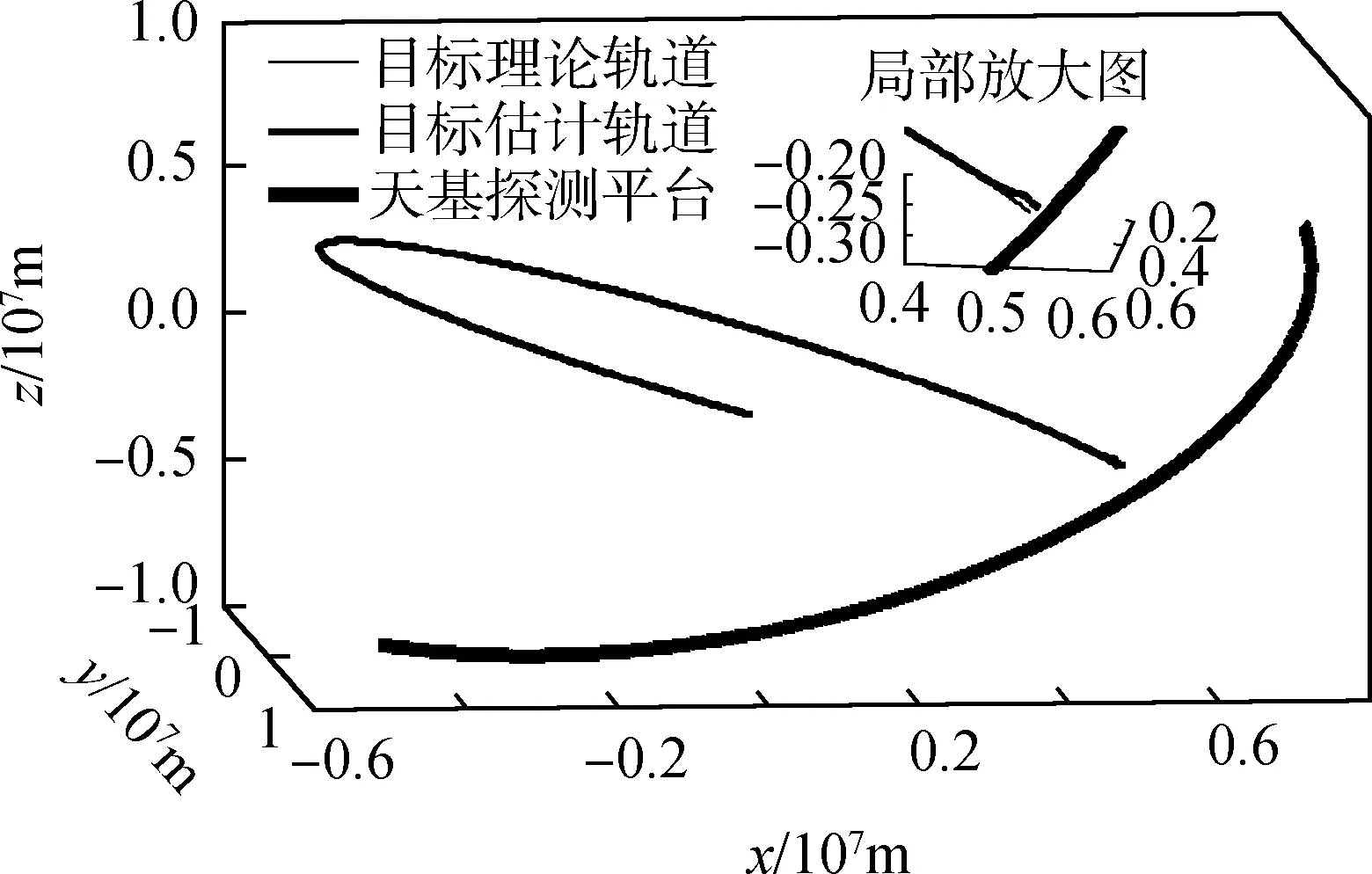
图1 基于AST-SCKF算法的跟踪效果Fig.1 Tracking effect based on AST-SCKF
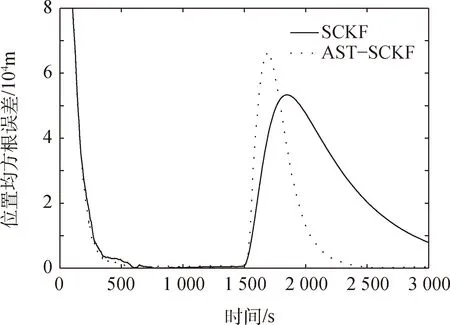
图2 位置均方根误差比较Fig.2 Comparison of position root-mean square error
分析图2和图3中的AST-SCKF算法的RMES曲线,可以得到该自适应滤波器的状态切换情况,如表1所示。
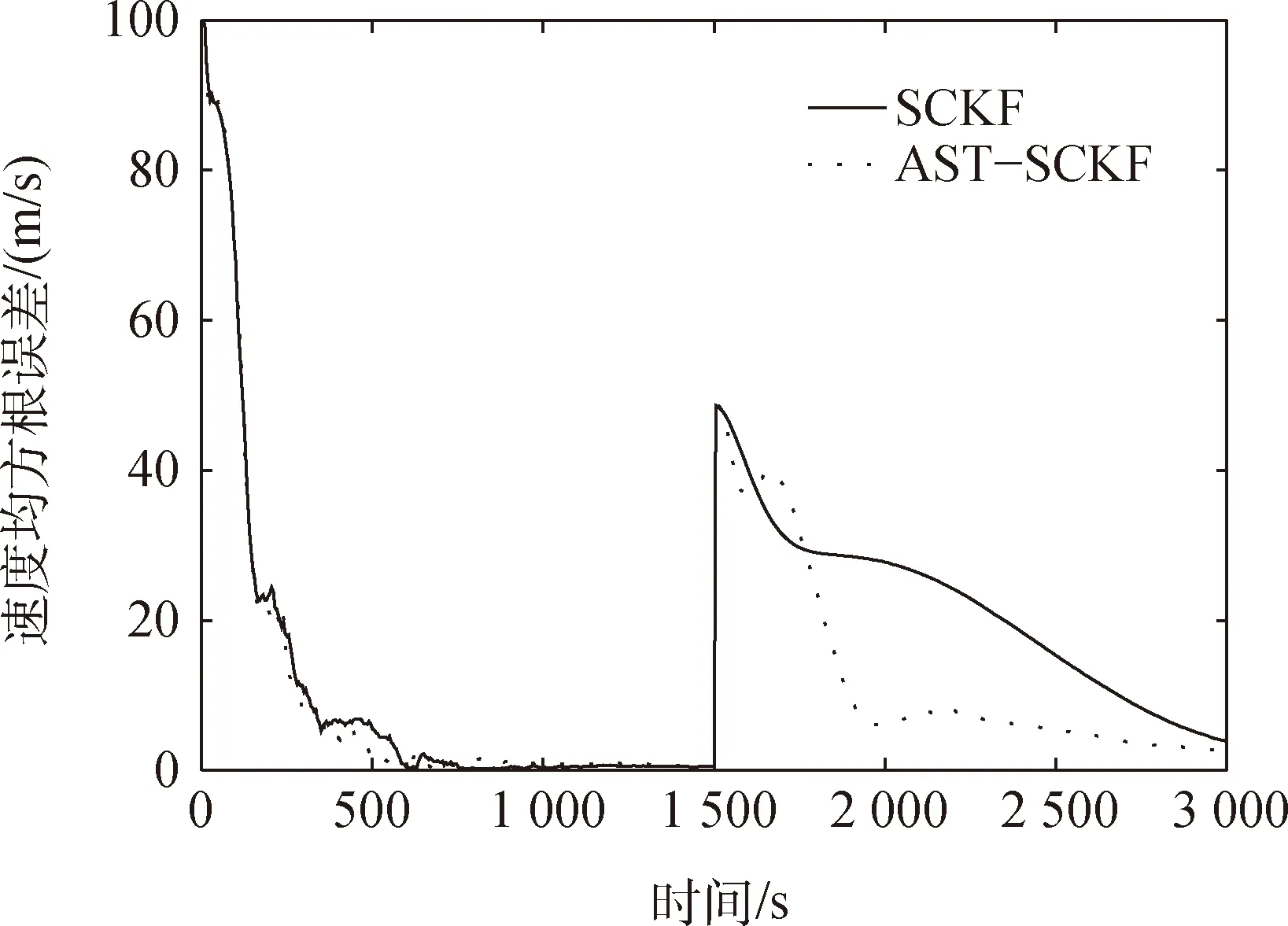
图3 速度均方根误差比较Fig.3 Comparison of velocity root-mean square error
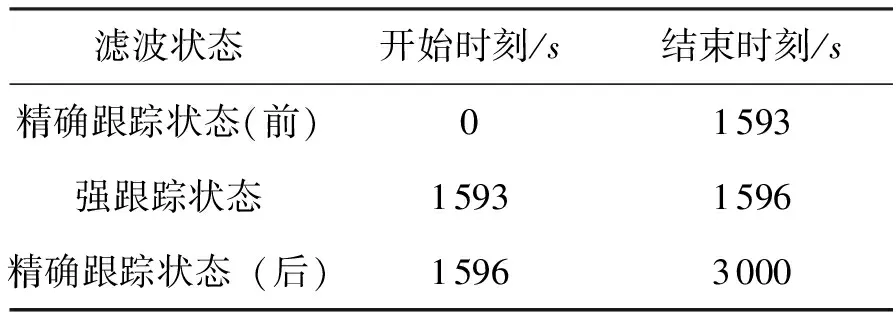
滤波状态开始时刻/s结束时刻/s精确跟踪状态(前)01593强跟踪状态15931596精确跟踪状态(后)15963000
通过表1可以看出,在仿真开始时,滤波器处于精确跟踪的状态;目标与1 500s机动后,滤波器在1 593s检测到目标机动,并自主切换到强跟踪状态,通过一个滤波周期(3s)的调整,迅速切换回精确跟踪状态,直至仿真结束。结果一方面表明了第2.2节中机动检测机制的合理性,同时反映了AST-SCKF算法对滤波精确性和鲁棒性的有效结合。
根据第3.3节中建立的性能指标评价标准,对AST-SCKF算法和SCKF算法在目标机动前后的跟踪性能进行比较如表2和表3所示。
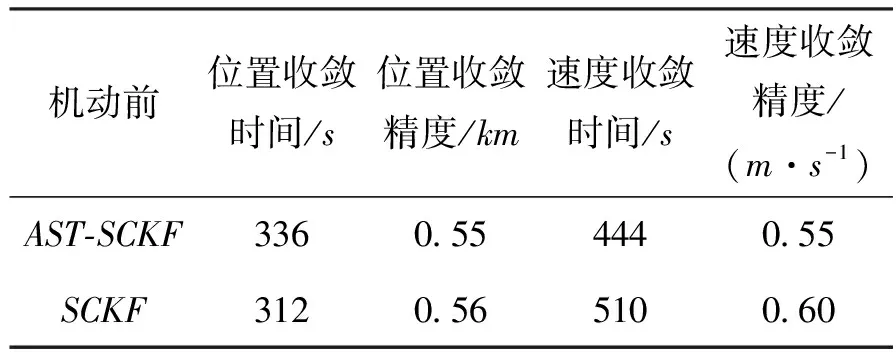
表2 目标机动前SCKF与A-SCKF性能比较
仿真结果表明,在目标机动前,AST-SCKF处于精确跟踪状态,AST-SCKF的位置收敛精度和速度收敛精度比SCKF算法分别提高了0.02%和8.33%,收敛速度分别提高了-0.75%和12.94%,显示了机动前两种算法的性能相当;1 500s目标发生机动造成目标的状态突变,SCKF滤波器出现严重的滞后,而AST-SCKF滤波器能在目标机动后自适应地切换至强跟踪滤波状态,从而在短时间内再次精确跟踪上目标。
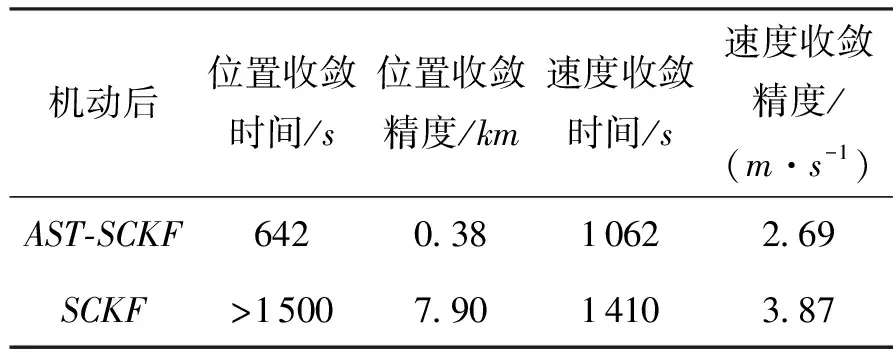
表3 目标机动后SCKF与A-SCKF性能比较
AST-SCKF的位置收敛精度和速度收敛精度比SCKF算法分别提高了95.19%和30.50%,收敛速度分别提高了57.20%和24.68%,显示了AST-SCKF算法的优越性。
4 结束语
本文针对空间机动目标跟踪问题,主要工作和研究结论如下:
1)将STF次优渐消的思想引入到SCKF中,并推导了次优渐消因子在SCKF中的等价表达形式,突破了强跟踪算法基于EKF的局限性,新的算法能在高阶非线性滤波问题中得到较好的应用,比如本文建立的考虑地球非球形摄动的空间目标运动模型。
2)采用矩匹配的方法进行目标机动检验,提出了一种检测自适应滤波方法——AST-SCKF算法,该算法能准确检测目标的机动行为,并通过切换滤波状态来达到滤波鲁棒性和精确性的高度统一。但该检测方式的阈值设置需要一定的先验信息来辅助设置,不具备普遍性;另一方面当前方法对机动行为的检测仍存在一定的延迟现象。
3)通过仿真比较,验证了本文算法在收敛时间和收敛精度上都明显优于传统算法。但本文所研究的机动形式单一,而空间目标的机动形式和机动能力都将不断增强,因此,还需要对机动模型进行完善,同时研究能适应多种机动形式的空间目标的跟踪算法。
References)
[1] 李冬,易东云,程洪玮. 天基光学监视的GEO空间目标短弧段定轨方法J]. 中国空间科学技术,2011,31(3):1-7.
LI D,YI D Y,CHENG H W. Orbit determination for GEO objects with short arcs of space-based optical observationsJ]. Chinese Space Science and Technology,2011,31(3):1-7(in Chinese).
[2] LI X R,JILKOV V P. A survey of maneuvering target tracking-part II:Ballistic target modelsC]∥Proc. SPIE. 2001,4473:559-581.
[3] 周东华,席裕庚,张钟俊. 非线性系统带次优渐消因子的扩展卡尔曼滤波J]. 控制与决策,1990(5):1-6.
ZHOU D H,XI Y G,ZHANG Z J. Suboptimal fading extended Kalman filtering for nonlinear systemsJ]. Control and Decision,1990(5):1-6(in Chinese).
[4] 周东华,席裕庚,张钟俊. 一种带多重次优渐消因子的扩展卡尔曼滤波器J].自动化学报,199l,17(6):689-695.
ZHOU D H,XI Y G,ZHANG Z J. A suboptimal multiple fading extended Kalman filterJ].Acta Automatica Sinica,199l,17(6):689-695(in Chinese).
[5] 王小旭,赵琳,夏全喜,等. 基于Unscented变换的强跟踪滤波器J]. 控制与决策,2010,25(7):1063-1068.
WANG X X,ZHAO L,XIA Q X,et al. Strong tracking filter based on unscented transformationJ]. Control and Decision,2010,25(7):1063-1068(in Chinese).
[6] 宋琛,韩潮,耿建中. 自适应粒子滤波在紫外导航中的应用J]. 中国空间科学技术,2009,29(1):32-40.
SONG C,HAN C,GENG J Z. Application of adaptive particle filtering in ultraviolet sensorsJ]. Chinese Space Science and Technology,2009,29(1):32-40(in Chinese).
[7] Uhlmann J,Julier S,Durrant-Whyte H F. A new method for the non linear transformation of means and covariances in filters and estimationsJ]. IEEE Transactions on Automatic Control,2000,45(3):477-482.
[8] Arasaratnam I,Haykin S. Cubature Kalman smoothersJ]. Automatic,2011,47(8):2245-2250.
[9] 潘泉,杨峰,叶亮,等. 一类非线性滤波器-UKF综述J].控制与决策,2005,20(5):481-489.
PAN Q,YANG F,YE L,et al. Survey of a kind of nonlinear filter—UKFJ]. Control and Decision,2005,20(5):481-489(in Chinese).
[10] 郝燕玲,杨峻巍,陈亮,等. 平方根容积卡尔曼滤波器J]. 弹箭与制导学报,2012,32(2):169-172.
HAO Y L,YANG J W,CHEN L,et al. Square root cubature Kalman filterJ]. Journal of Projectiles,Rockets,Missiles and Guidance,2012,32(2):169-172(in Chinese).
[11] 涂文斌. 空间机动目标跟踪方法研究D]. 上海:上海交通大学,2012:65-85.
TU W B.Research on tracking of maneuvering spatial targetD]. Shanghai:Shanghai Jiao Tong University,2012:65-85. (in Chinese)
[12] 王志刚. 远程火箭与卫星轨道力学基础M].西安:西北工业大学出版社,2006:92-157.
WANG Z G. A long-range rocket and satellite orbital mechanicsM]. Xi′an:Northwest Polytechnical University Press, 2006:92-157(in Chinese).
[13] 李骏. 空间目标天基光学监视跟踪关键技术研究D]. 长沙:国防科技大学,2009:65-95.
LI J. Research on key technologies of space objects surveillance and tracking in space-based optical surveillanceD]. Changsha:National University of Defense Technology,2009:65-95(in Chinese).
[14] 李恒年. 卫星机动轨道确定M]. 北京:国防工业出版社,2013:75-95.
LI H N. Orbit determination for maneuvering satelliteM]. BeiJing:National Defense Industry Press, 2013:75-95(in Chinese).
[15] 刘也,刘磊,曹建峰,等. 单天基平台测向的空间非合作目标跟踪J]. 飞行器测控学报,2014,33(4):328-333.
LIU Y,LIU L,CAO J F,et al. Bearing-only tracking of non-cooperative space objects by a single space-based platformJ]. Journal of Spacecraft TT&C Technology,2014,33(4):328-333(in Chinese).
[16] 林浩申,黄璜,刘刚,等. 基于SCKF算法的空间机动目标跟踪研究J]. 电光与控制,2015,22(3):64-67.
LIN H S,HUANG H,LIU G,et al. Tracking of maneuvering spatial target based on SCKFJ]. Electornics Optics & Control,2015,22(3):64-67(in Chinese).
(编辑:车晓玲)
A localization algorithm for adaptive maneuvering spatial targets
LIN Haoshen,LIU Gang*,HE Bing
RocketForceUniversityofEngineering,Xi′an710025,China
In the space target tracking problem,the model mismatch caused by target maneuvering leads to serious hysteresis. In order to track spatial target faster,the suboptimal fading parameter of strong tracking filter (STF) was introduced in square-root cubature Kalman filter (SCKF),and the equivalent form was derived. On the basis of maneuvering detection,an adaptive strong tracking square-root cubature Kalman filter (AST-SCKF) which combined the accuracy and robustness was designed. The results of simulation show that the difference in positional accuracy between two algorithms is less than 1% before the maneuvering,but after the maneuvering,it turns out that the convergence accuracy of the AST-SCKF was 95.19% higher in position and 30.50% faster in velocity. Meanwhile,the convergence speed of AST-SCKF was 57.20% and 24.68% faster than SCKF in terms of position and velocity respectively.
spatial target localization;maneuvering target;bearing-only;adaptive filter;cubature Kalman filter;strong tracking filter; suboptimal fading parameter; maneuvering detection
10.16708/j.cnki.1000-758X.2017.0010
2016-05-04;
2016-07-28;录用日期:2016-11-24;
时间:2017-02-16 16:46:20
http:∥www.cnki.net/kcms/detail/11.1859.V.20170216.1646.003.html
国家自然科学基金“基于量子生物地理优化的低空UAV编队在线协同航迹规划方法研究”(61403399)
林浩申(1992-),男,硕士研究生,linhaoshen1@163.com,研究方向为信息融合与目标跟踪
*通讯作者:刘刚(1964-),男,教授,pdh_0818@163.com,研究方向为导航制导与控制
林浩申,刘刚,何兵. 自适应空间机动目标跟踪算法J].中国空间科学技术,2017,37(1):26-32.LINHS,LIUG,HEB.AlocalizationalgorithmforadaptivemaneuveringspatialtargetsJ].ChineseSpaceScienceandTechnology,2017,37(1):26-32(inChinese).
P123.46
A
http:∥zgkj.cast.cn
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
北京航空航天大学学报(2021年7期)2021-08-13
当代陕西(2019年12期)2019-07-12
电子制作(2019年11期)2019-07-04
汉语世界(The World of Chinese)(2019年1期)2019-03-18
电子制作(2019年23期)2019-02-23
电子制作(2018年16期)2018-09-26
电子制作(2018年1期)2018-04-04
北京航空航天大学学报(2017年9期)2017-12-18
