基于LAMBDA和DC算法的GPS单历元整周模糊度的快速确定
2017-03-30 08:51田林亚
测绘工程 2017年6期
吴 坤,田林亚,王 涛
(河海大学 地球科学与工程学院,江苏 南京 211100)
基于LAMBDA和DC算法的GPS单历元整周模糊度的快速确定
吴 坤,田林亚,王 涛
(河海大学 地球科学与工程学院,江苏 南京 211100)
仅利用LAMBDA方法求解GPS单历元整周模糊度成功率不高,并且当接收卫星数较多时搜索空间较大。为此,采用TIKHONOV正则化方法削弱单历元模型法方程的病态性,并且基于协方差矩阵选择部分宽巷模糊度,先采用LAMBDA方法进行搜索,再利用高解算效率的DC算法解算剩余宽巷模糊度,最后通过两组不同线性组合的逆变换直接求取原始观测值L1和L2的整周模糊度。实验和计算表明,方法显著提高整周模糊度的搜索效率,并且提高模糊度搜索成功率。
GPS单历元;整周模糊度;模糊度解算;LAMBDA方法;DC算法;TIKHONOV正则化
高精度GPS实时动态定位的难点在于整周模糊度的快速固定。一般准确固定整周模糊度的前提是需要多个历元的数据,并且必须保证在这些历元间不发生周跳[1],否则解算不会成功。鉴于单历元求解整周模糊度无需考虑周跳的影响,国内外学者对单历元固定整周模糊度进行诸多研究,提出诸多算法,如LMS法、双频P码法、DUFCOM法、DC算法等。由于高精度P码观测值是普通用户难以获得的,因此LMS法与双频P码法的实用性受到限制。为了提高解算效率和成功率,一些研究人员提出附加先验信息的求解方法,如附加基线约束的单频单历元LAMBDA方法[2],通过添加附加信息可以提高单历元整周模糊度搜索效率和成功率,但是在一般情况下往往无法准确获得这些先验信息。
在GPS单历元解算模糊度的数学模型中,加入伪距观测值,由于伪距观测值与载波观测值的精度相差较大,会降低浮点解的精度,虽然合理确定权阵可以提高浮点解的精度,但是对于实测数据,权阵的参数不好选取。同时,观测信息较少、卫星的空间分布不均、初始坐标的不准确等问题,也会导致单历元模型中的法方程阵不适定,而随着接收卫星的增多,模糊度的搜索空间又会变大。因此,本文利用TIKHONOV 正则化方法获取可靠的浮点解和协方差阵[3-5],选择方差较小的宽巷模糊度进行LAMBDA方法搜索[6],固定部分模糊度,通过这部分模糊度解算出待定点的坐标,由于解算出的待定点坐标的精度较高,满足DC算法的要求[7-8],因此直接利用DC算法求出剩余模糊度。采用同样的方法再求解出另一线性组合观测值的模糊度,由两组线性组合模糊度的逆变换直接求取原始观测值L1和L2的模糊度[9]。
1 单历元解算整周模糊度的数学模型与病态方程的解法
GPS观测值进行双差(L1/L2)处理后,卫星钟差与接收机钟差均已消除,当两个测站相距不远时,对流层延迟、电离层延迟也已得到充分的削弱,考虑到宽巷载波具有波长较长和噪声较小的优点,观测方程简化为
(1)
式中:C为伪距双差观测值与卫地距之差;LW为宽巷双差观测值与卫地距之差;B为伪距双差观测方程的设计矩阵;I为单位阵;λW为宽巷载波的波长;X为基线改正向量;N为宽巷双差模糊度;εC为伪距双差观测值的噪声;εW为宽巷双差观测值的噪声。
当同时接收至少4颗卫星及以上时,根据最小二乘原理可对式(1)进行解算,法方程及其解为
(2)

单历元最小二乘浮点解会因为法方程的病态性而不准确,同时因为测量噪声无法消除,导致浮点解的可靠性降低。依据TIKHONOV正则化理论,引入平滑因子α和正则化矩阵R,在最小二乘基础上得出可靠的浮点解。
Y=(M+αR)-1L.
(3)
随着αR的加入,法方程的病态性得到削弱,因而能获取可靠的浮点解。根据文献[10],采用平滑因子α和正则化矩阵R效果最好,式中,I为3×3单位阵。

2 双差模糊度的搜索及固定
2.1 LAMBDA算法求解部分模糊度

(4)
搜索空间定义为
(5)
式中:NZB为待定整周模糊度;χ为χ2分布的置信系数。
计算每一组备选模糊度的目标函数值,目标函数Ω为

(6)
对目标函数进行Ratio检验,即函数次最小和最小值之比为
(7)
当Ratio大于某一阈值时(一般取2),可以认为对应的备选模糊度组为正确的模糊度组,可以通过逆变换得到正确的模糊度组,即
NB=Z-1NZB.
(8)
当这部分模糊度(大于3个)确定后,可以直接解算出待定点的坐标。由于载波测量精度较高,通过这部分宽巷载波双差求得的待定点坐标的精度高于0.7 m。
2.2 DC算法求解剩余模糊度
DC算法与LAMBDA方法不同,无需求解法方程,更不需要搜索和固定,只需直接求整计算出整周模糊度的实数解,计算简单方便。通过双频扩波的方法能够使点位坐标的精度高于0.7 m,完全能够满足DC算法的要求,直接解算出剩余宽巷双差模糊度,算式为
ΔNW=Δρ/λW-ΔφW.
(9)
由式(9)解算的是宽巷双差模糊度的实数解,直接取整便得到正确的整周模糊度。
2.3 双差模糊度的解算
鉴于组合观测值的测量噪声过大,定位精度相对较低,宽巷双差模糊度一般不是所需的最终成果,实际需要的是原始观测值L1和L2的整周模糊度N1和N2。对此,只要解算出另一组组合观测值的整周模糊度NS,就可以利用式(10)求解出N1和N2。采用该方法进行单历元模糊度求解,避免宽巷双差观测值转化为精确的伪距观测值以及原始相位双差观测值的计算,提高解算效率。
(10)
式中:m1,m2,n1,n2为观测值的组合系数。
3 实例计算与分析
为了验证本文方法的可行性,采用GPS静态观测一条长度约1 km的基线,采样率为15 s,观测时间为15 min,用本文的方法进行单历元动态求解。首先通过本文研究的单历元模型计算出模糊度的浮点解和协方差阵,基于协方差阵选择3个以上的模糊度使用LAMBDA方法搜索固定,然后利用DC算法求解剩余的模糊度,通过使用两组不同组合的整周模糊度反算出L1/L2的双差模糊度。为了验证本文方法的正确性,利用固定的L1/L2的双差模糊度计算待定点的坐标,并与GPS静态数据处理软件所求的待定点坐标进行比较。
在实验观测时段中,每个历元有9颗卫星的观测数据,卫星星号没有发生变化,但参考卫星发生变化,本文取高度角最大的卫星作为参考卫星,选取4个宽巷双差模糊度参数并采用LAMBDA方法进行搜索固定。在前33个历元中以19号卫星为参考卫星,在后27个历元中以7号卫星作为参考卫星。在这两段时间内,宽巷双差模糊度的值不相同,但是不影响本文方法的解算。以3号卫星和16号卫星为例,在这60个历元中,3号卫星的宽巷双差模糊度参数都是采用LAMBDA方法进行搜索固定,16号卫星的宽巷双差模糊度参数都是采用DC算法直接进行计算固定的,它们的浮点解与固定解如图1所示。

图1 双差模糊度计算结果
由图1可以看出,本文研究的单历元算法求出的浮点解精度较高,由DC算法求出的模糊度浮点解与固定解非常接近,只需要直接取整,显著缩小搜索空间。传统LAMBDA方法与本文方法在模糊度搜索空间大小的对比如表1所示。
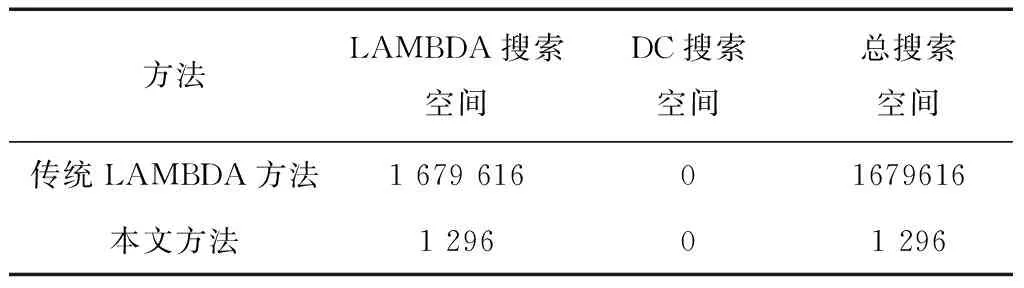
表1 模糊度搜索空间对比 个
将全部模糊度固定后,根据每个历元的宽巷双差模糊度计算的坐标精度如图2所示。
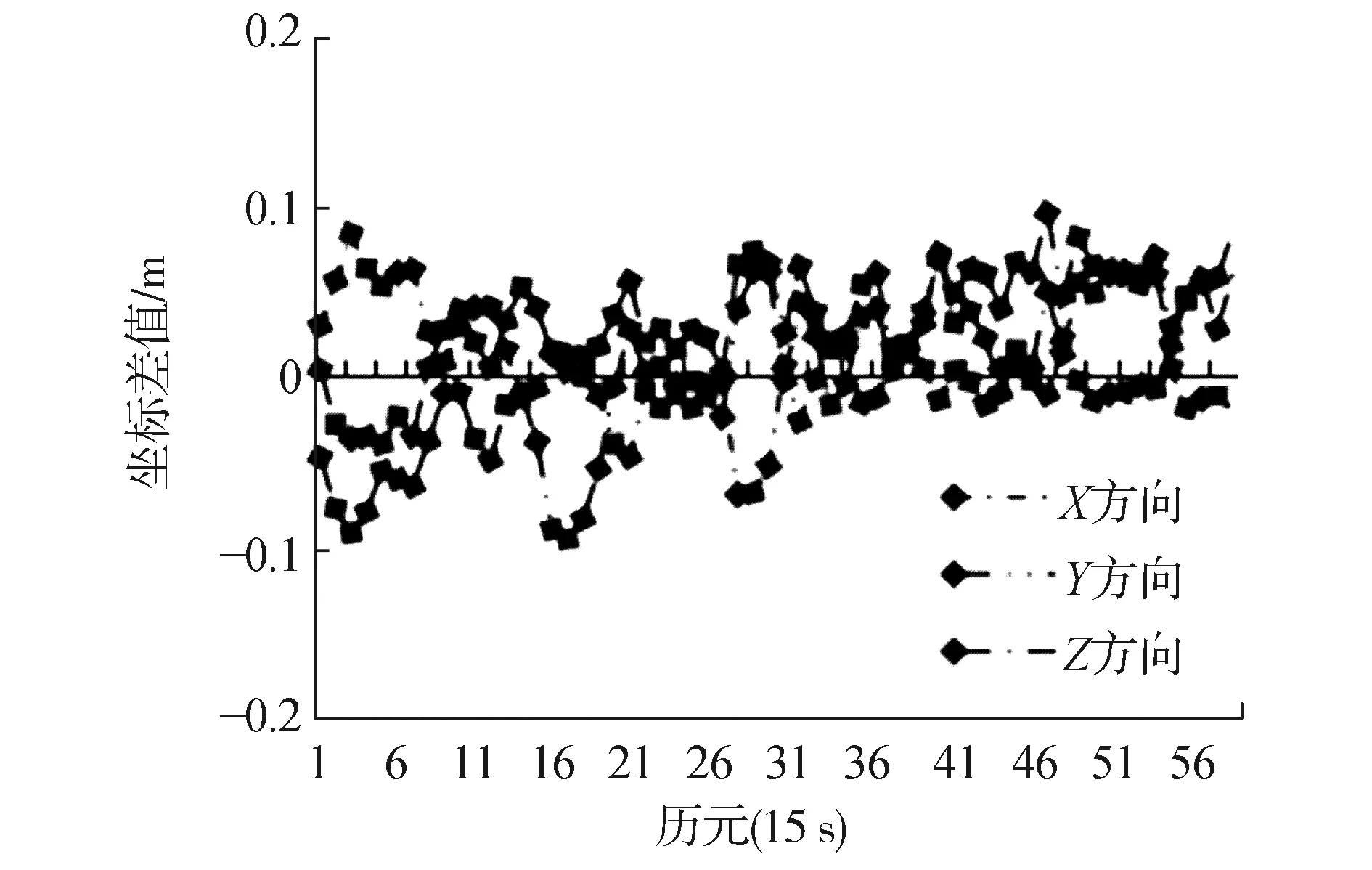
图2 宽巷模糊度解算的坐标差
按照上述方法,再固定一组组合观测值模糊度,将两组组合模糊度代入式(10),可以直接计算出N1和N2。本文选取m2=-1,n2=2的组合系数计算N1和N2,因为该组合波长较长,噪声较小。由固定的L1的模糊度N1求出每个历元待定点的坐标精度如图3所示。 对比图2和图3, 可见组合模糊度不同程度上放大了观测噪声,组合模糊度求出的坐标精度低于原始观测值求出的坐标精度。
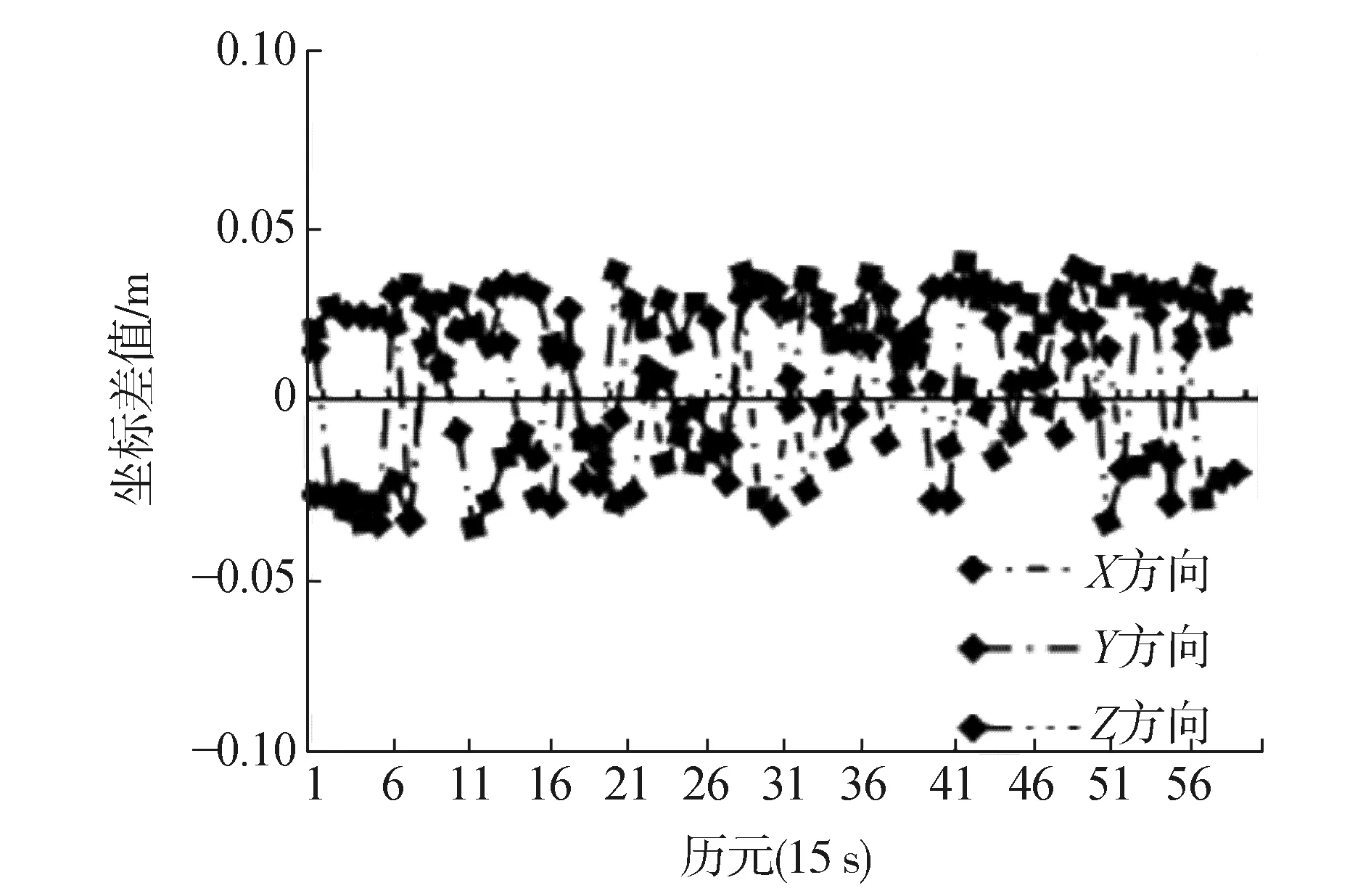
图3 L1模糊度解算的坐标差
4 结束语
仅通过LAMBDA方法求解单历元模糊度,会由于浮点解的不可靠和搜索空间过大而导致搜索失败。本文研究的方法考虑两个方面,使LAMBDA方法的固定成功率得以提高。第一,通过引入正则化矩阵,削弱单历元模型法方程的病态性,得到更为可靠的浮点解和协方差阵;第二,通过选择浮点解方差较小的模糊度,去除那些方差较大、浮点解不可靠的模糊度。通过LAMBDA方法解算出的部分模糊度求解出待定点的坐标,满足实现DC算法的先决条件,结合DC算法极高的解算效率,大大缩小模糊度的搜索空间,只需要固定两组不同线性组合的模糊度便能直接求得N1和N2。实验计算表明,本文研究的单历元整周模糊度解算方法具有较高的搜索效率和成功率。
[1] 蔡昌盛,高井祥.GPS周跳探测及修复的小波变换法[J].武汉大学学报(信息科学版),2007,32(1):39-42.
[2] 唐卫明.附有基线长度约束的单频数据单历元LAMBDA方法整周模糊度确定[J].武汉大学学报(信息科学版),2005,30(5):444-446.
[3] 王振杰,欧吉坤,柳林涛.单频GPS快速定位中病态问题的解法研究[J].测绘学报,2005,34(3):196-201.
[4] 徐爱功.单历元解算整周模糊度及检验方法研究[J].测绘通报,2012(4):1-3.
[5] 李慕清.GPS单历元模型病态方程解算方法研究[J].大地测量与地球动力学,2013,33(1):160-162.
[6] 张勤.基于整周模糊度概率特性的有效性检验[J].测绘科学,2003,28(2):16-19.
[7] 王新洲.GPS变形监测中整周模糊度解算新方法[J].武汉大学学报(信息科学版),2007,32(1):24-26.
[8] 邱蕾.GPS短基线整周模糊度直接解法[J].武汉大学学报(信息科学版),2009,34(1):97-99.
[9] 刘宁.一种新的GPS整周模糊度单历元求解算法[J].武汉大学学报(信息科学版),2013,38(3):291-294.
[10] 孔令杰,黄观文.基于TIKHONOV 正则化的短基线单历元模糊度解算方法研究[J].大地测量与地球动力学,2010,30(2):148-154.
[责任编辑:张德福]
FastFix of GPS single epoch ambiguity resolution based onLAMBDA and DC algorithms
WU Kun, TIAN Linya, WANG Tao
(School of Earth Science and Engineering, Hohai University, Nanjing 211100,China)
The success rate of GPS ambiguity resolution is not high if LAMBDA algorithm is used only. With the number of satellites received exceeding, the space of search will be larger. In order to improve the condition of ill-posed normal equation on single-epoch, TIKHONOV regularization has been used in this paper. On the basis of variance matrix,the part of wide-lane ambiguity is selected to fix with LAMBDA algorithm. The rest of wide-lane ambiguity is fixed, combined with the DC algorithm which has the advantage of extremely high efficiency. Ambiguity of L1 and L2 are solved by means of the inverse linear transformation. The experimental results show this method can improve the efficiency for ambiguity greatly and the success rate of ambiguity resolution.
GPS single epoch;integer ambiguity;resolution of ambiguity;LAMBDA algorithm; DC algorithm; TIKHONOV regularization
引用著录:吴坤,田林亚,王涛.基于LAMBDA和DC算法的GPS单历元整周模糊度的快速确定[J].测绘工程,2017,26(6):30-33.
10.19349/j.cnki.issn1006-7949.2017.06.006
2016-06-07
吴 坤(1992-),男,硕士研究生.
P228
A
1006-7949(2017)06-0030-04
猜你喜欢
北京大学学报(自然科学版)(2022年4期)2022-08-18
测绘学报(2022年5期)2022-05-31
导航定位学报(2022年2期)2022-04-11
大地测量与地球动力学(2022年1期)2022-01-11
中国惯性技术学报(2020年2期)2020-07-24
铁道通信信号(2019年4期)2019-10-10
测绘工程(2019年2期)2019-03-25
测绘通报(2017年10期)2017-11-07