
先进瞄准吊舱动态特性仿真与测试的工程化方法
2017-04-05 08:35迟圣威李世尧王明超施道云
兵器装备工程学报 2017年3期
迟圣威,朱 镭,李世尧,韩 瑞,王明超,施道云
(西安应用光学研究所,西安 710065)
【装备理论与装备技术】
先进瞄准吊舱动态特性仿真与测试的工程化方法
迟圣威,朱 镭,李世尧,韩 瑞,王明超,施道云
(西安应用光学研究所,西安 710065)
瞄准吊舱的伺服单元和结构单元成强耦合关系,为了使系统获得良好的伺服特性,需要对系统谐振进行抑制;利用电机扫频获得系统重要谐振点,给出基于质量特性与传力路径方式双重模式并行的瞄准吊舱分析模型简化方法,并根据吊舱结构特征详细设计和实施了模态测试方案;最后提出一种基于频率区间逼近与振型视觉匹配双重评价指标的模型快速确认方法,它使仿真结果和测试结果能迅速直接进行闭环验证;整个仿真-测试链路方便设计人员掌握,具有很强的工程实用性。
先进瞄准吊舱;伺服特性;双模并行简化方法;模型确认;闭环验证;仿真-测试链路
瞄准吊舱作为一个光机电集成度很高的复杂系统,为了实现高精度稳定瞄准的目的,吊舱自身需要有良好的稳定能力。带宽是评价伺服系统稳定能力的重要指标,在工程实践中,低频谐振对伺服带宽的限制作用非常明显,有效地抑制谐振是瞄准系统发挥作战效能的关键因素[1]。
消除或减小机械谐振对系统品质的影响,主要可以从结构和伺服两个方面采取措施。从结构的角度出发,主要是提高固有频率和增大阻尼。提高固有频率的方法一是提高系统刚度,对于机载平台这样有严格重量要求的产品,低频往往对应整体模态,刚度的提高和设计约束相协调在实际工程中不是一个简单的问题。二是增加系统阻尼,合理选用和布置减振器,不过由于安装空间、位置和减振器自身性能的限制往往和理想的状态有一定的差距。从伺服的角度出发,主要是通过增加定频陷波器、降低系统伺服带宽等措施来抑制谐振[2]。这些方法都会对系统性能产生不利的影响。采用陷波器会降低伺服控制系统的相位裕度;降低带宽会降低系统的动态响应特性。
不论采用哪一种抑振手段,首要问题是全面准确地获得所关注频率下系统振动的完整信息。比如,若采用较为常用的陷波滤波器,则需要获得准确的频率和振幅信息。若采用基于加速度反馈的抑振补偿算法,它的效果更是依赖于数学模型建立的准确度。而通过增加结构刚度提高系统固有频率,也需要观察振型判断结构在该阶振动时的薄弱位置,才能避免设计的盲目性。
一般来说,伺服系统会通过电机扫频判断哪一阶谐振对系统性能造成不利影响。而结构上则通过有限元分析和模态测试对获取该阶模态数据,有限元分析有预试验的作用,它往往能在测试通道有限的条件下指导试验人员更合理的布置传感器。而试验模态分析技术不仅可以验证有限元计算结果,而且由于理论模型和工程样机有一定的差别,从实践的角度出发一般认为模态试验的结果更能说明问题。
1 瞄准吊舱与伺服特性
1.1 先进瞄准吊舱系统
与传统的两轴四框架隔离稳定平台形式不同,先进瞄准吊舱属于典型的二级稳定平台,既通过陀螺稳定平台实现粗级稳定,通过快速反射镜(FSM)实现精级稳定,最终系统稳定精度可以接近甚至达到微弧级,代表未来光电吊舱的发展方向,这种高精度稳定平台对振动的隔离度提出了更高的要求[3]。
当系统装配完成后,需要对伺服系统进行调试和验证。新型光电吊舱采用“三光合一”的共窗口共光路设计,其光学平台上安装有卡赛格林系统、多种传感器、复杂分光系统和其他功能组件(图1),和传统整体稳定平台的分立传感器安装方式有很大不同[4]。二级稳定平台的伺服系统特性也需要通过测试来判断其与传统整体稳定平台相比较性能提升的情况[5-6]。
1.2 伺服扫频分析
伺服系统扫频时,通过频谱分析仪对系统发送正弦信号(图2),控制器负责控制信号的偏差,将信号放大后传递给执行电机,执行电机驱动平台负载响应。最后从安装在平台负载上的陀螺仪采集到反馈信号一路构成闭环回路,一路返回到频谱分析仪。通过频谱分析仪中的数据处理软件将闭环曲线换算成开环曲线(图3),分析系统的谐振频率。
从扫频结果分析,在20 Hz附近和69.14 Hz位置各有一个谐振点。其中69.14 Hz位置处幅值和相位变化较大,伺服系统难以有效抑制该谐振,需要从结构的角度抑制该阶振动。
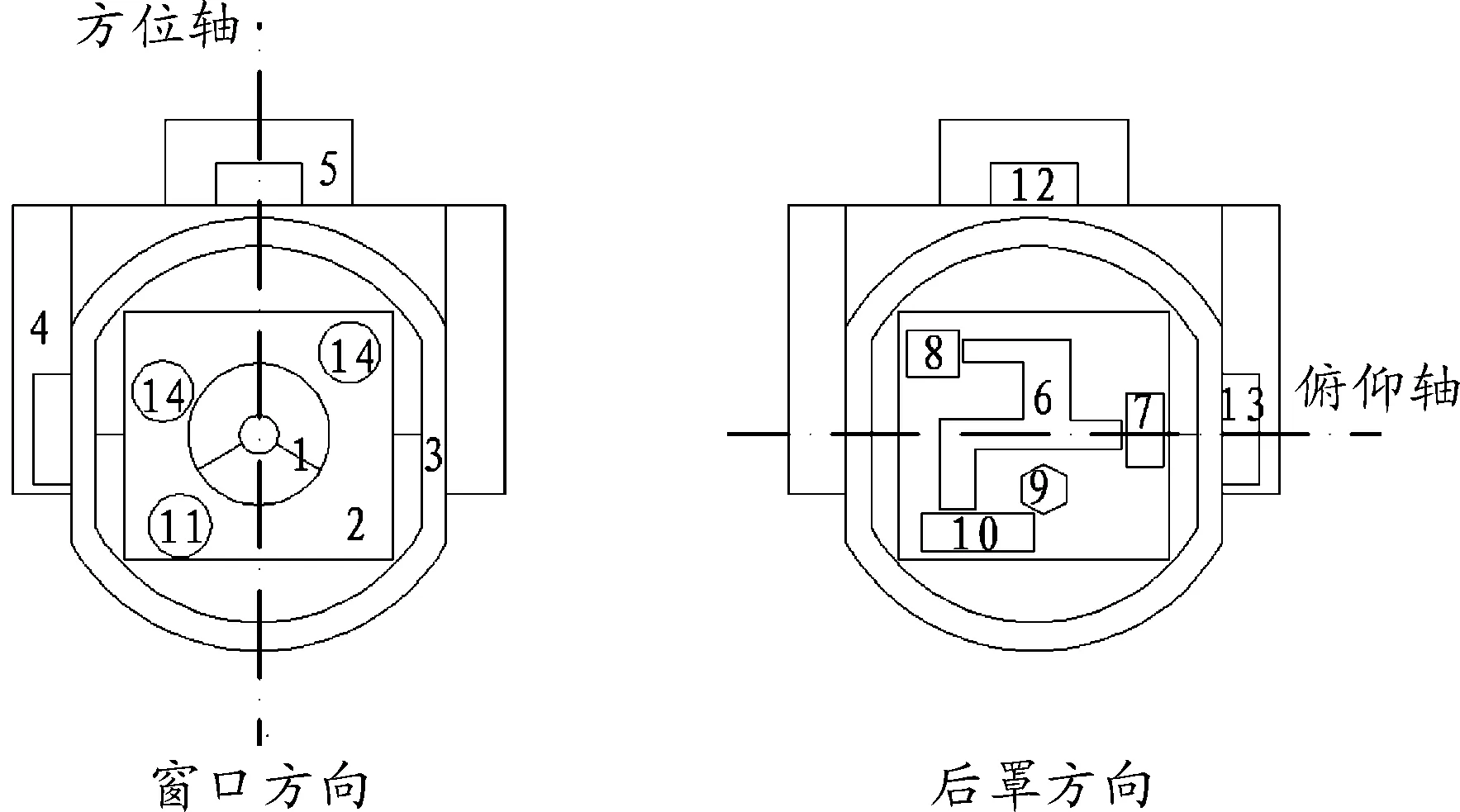
1.卡赛格林系统;2.光学平台;3.内环框架;4.外环框架;5.电子箱;6.分光系统;7.热像传感器;8.电视传感器;9.快速反射镜;10.激光传感器;11.陀螺组件;12.方位电机;13.俯仰电机;14.其他功能组件
图1 二级稳定吊舱结构示意图
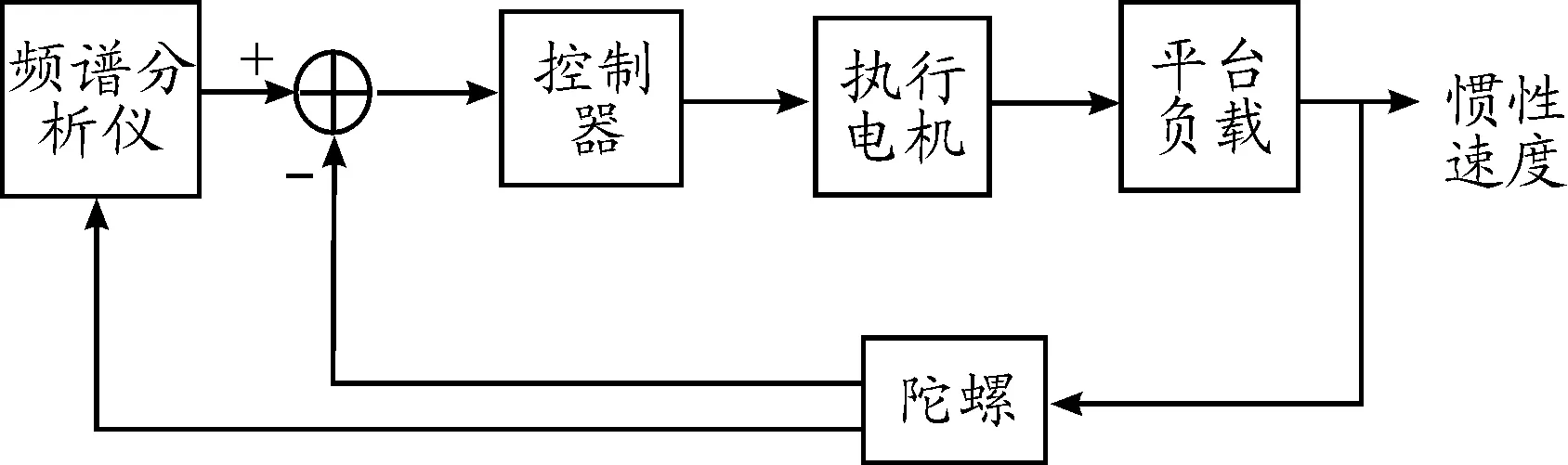
图2 伺服系统扫频示意图
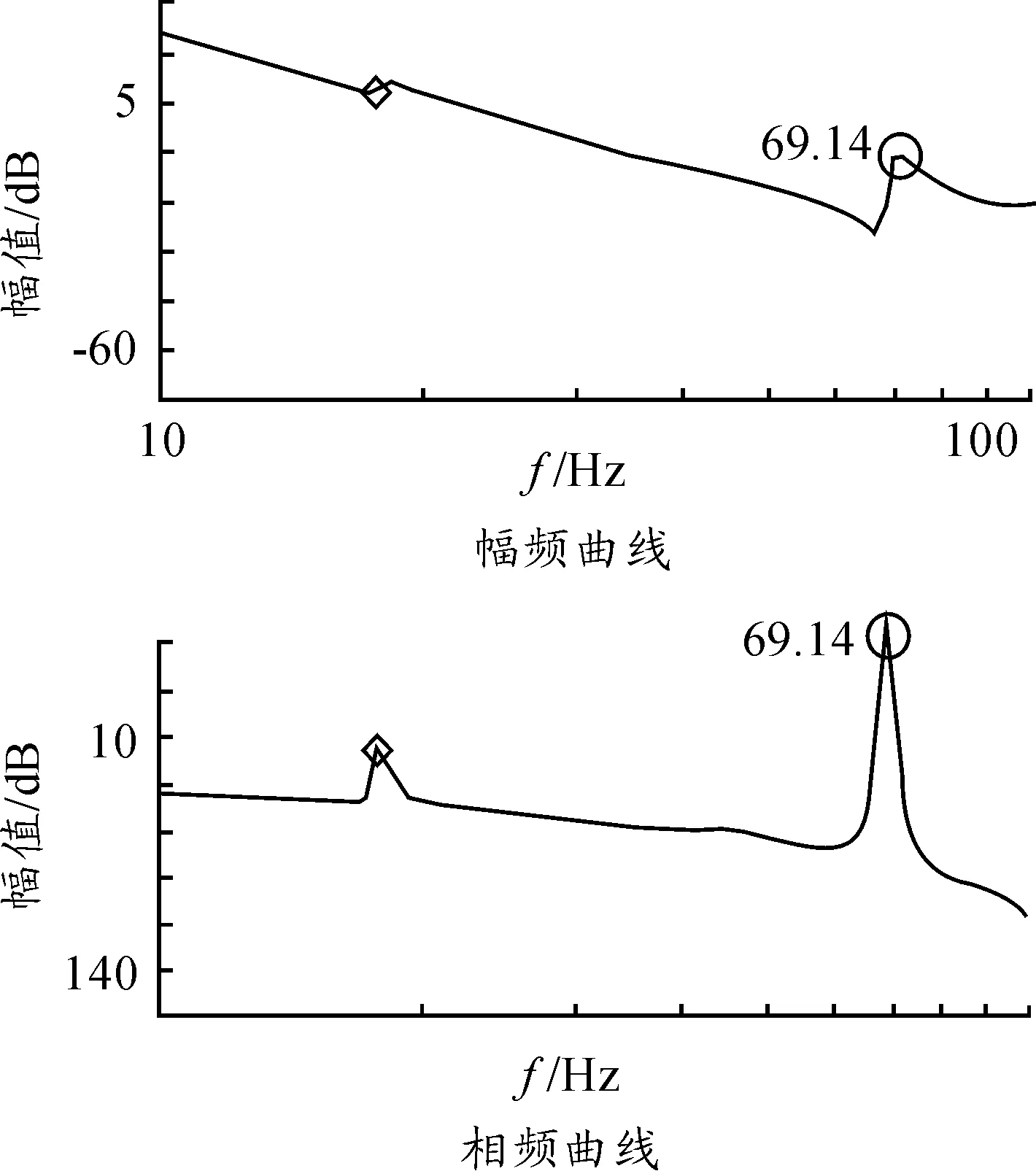
图3 频谱分析
2 瞄准吊舱动力学仿真技术
2.1 双模并行的模型简化技术
有限元分析是获得结构动态特性的有效手段。在对光电吊舱进行系统级的结构有限元分析时,由于计算机资源和运算效率的限制,需要对吊舱进行一定程度的简化[7]。经过长期的探索,提出了基于质量特性与传力路径双重模式并行的简化方法。
1) 光电传感器位于传力路径的最前端,所以在力学仿真时可以直接简化成集中质量点。
2) 非承重工艺件由于自身重量较轻,且不在传力路径上,当它们的质量之和小于总质量的百分之五,可以舍弃。
蒋介石在国民党执政的二十余年间,随着个人权势及外在环境的变化,不同时期对于党义阐述的重点和指向会有不同,其宣导的对象亦在不断扩大,但随着国民党在大陆失败的临近,其宣导的效果及实际影响的范围不断衰微。
3) 机电组件物理力学特性不明,但位于结构传力路径中,可以在原始几何外形的基础上,通过等效质量原则对该组件赋予相应密度。同时以最为接近的材料(如各种常用金属)做参考,赋予弹性模量等物理参数。
4) 轴承等标准件成对使用时,由于其质量特性相同,可以合并以减小计算规模。高效率的模型简化方式往往对精度不利,但从系统级仿真角度出发,合理简化的结果应该在所需的精度范围内。
2.2 动力学分析网格特性与计算结果
模态分析的网格划分和应力计算有一定的区别[8],特别是伺服系统往往最关心前几阶模态,且一般都是整体模态。此时网格不需要很密,应尽量适度均匀。这样不仅保证了精度也节约了计算资源。如式(1),虽然求解的是特征值问题,但与静力学问题相比计算机所占用的资源依然高出一个数量级。
(1)


表1 有限元前5阶模态频率计算结果
3 瞄准吊舱动力特性的快速模态试验方法
3.1 模态测试方案
由于瞄准吊舱的结构较为复杂,这里选择激励点固定,多点轮流测量的激励方法。模态测试时吊舱的安装状态要与伺服扫频时一致,这样也就确定了吊舱的固定边界条件。根据伺服扫频的频段选择刚度相对较差的橡胶锤头。对于现场实测,由于调试时间紧张,相对于产品的移动,采用便携式测试系统是更为方便和实用的选择。M+P振动测试系统(图4)有多个分立的模块,每一个模块都有十几个通道,可以分别携带。这种方法的缺点是通道相对较少,一次只能模拟出5个点(每个点有x,y,z三个方向)。但可以通过改变测点位置后多次测量,最后将多次测量数据合成,得到最后系统的频响函数[9-10]。

图4 模态试验设备
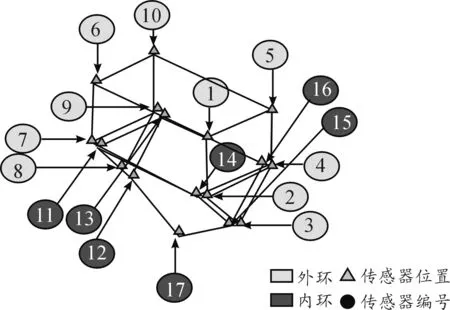
图5 内外环布点位置
为了获得合理的测试结果,一般认为对于作为固定边界条件的工装其第一阶固有频率要比产品高3~5倍才能让误差降低到可以接收的范围。有时受到条件的限制,简单的将调试工装作为测试工装使用。因为考虑搬运、装调的人机工效,此类工装一般质量较轻,刚度较差,有时伺服上电后工装还会出现明显晃动。在这种条件下测试会导致测试结果具有大的误差甚至错误。扫频测试中20 Hz附近的谐振点不是由吊舱本身产生的(图3),而是由不合理的调试工装产生的,通过更换刚性更好的调试工装可使该谐振点消失。所以,务必选择动态特性好的测试工装。
3.2 系统辨识
频响函数是在频域内描述的被测系统动力学特征,实测所得的频响函数是模态参数识别的依据,模态参数辨识一般分为两个阶段。第一阶段运用多参考时域法(PTD)辨识出模态频率,通过式(2)中系数矩阵[α]转换到Z域中矩阵多项式,求解该多项式特征方程的特征值,再将其转换到频域即可求出模态频率λi。特征向量就是模态参与向量[L]。
(2)
第二阶段运用多参考点最小二乘频域法计算出模态振型。在选取的频率范围内,通过一致性图确定合理的模型阶数。频响函数矩阵[H(ωi)]和每一阶的模态振型{ψ}之间的关系由式(3)含有模态频率成份的对角阵[B(λi)]和模态参与向量[L]联系起来[11]。最终的辨识结果如图6所示。
(3)
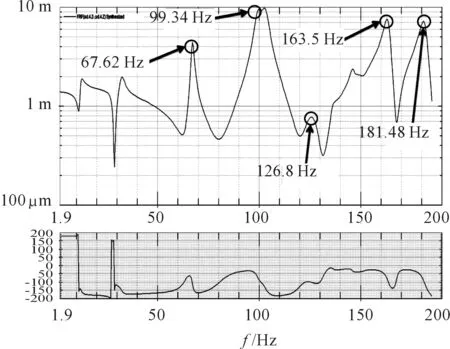
图6 模态辨识结果
4 模型确认与结构改进
一般对动力学模型进行精确确认需要运用模态置信准则,即用MAC值大于一定百分比来说明两个模态之间的相关性。事实上,一般设计人员缺乏更为深入的动力学知识,对于类似的判据缺乏了解,而频率和振型的概念却是设计人员普遍掌握的。在工程应用中仅仅通过仿真振型和试验振型配对,直接观察有限元软件和模态测试软件中的振型动画就能够判断所获得的模态结果是否准确,这就是所谓模态振型的视觉比较。
通过频率区间逼近量的确认(定量)和振型视觉匹配(定性)双重评价指标判别计算和测试的正确性,其优点在于可以直接获取结果,不需要进一步后处理,非常适用于进度较为紧张和模型较为复杂的实际工程产品。
从表2可以看出实测和仿真的结果吻合非常好,频率预测误差都在3%以下。而对第一阶模态的振型动画进行观察,可以看出,两者的振型描述是一致的,都是绕方位轴一阶弯曲,沿左右方向并倾斜一定的角度。
通过观察振型动画(图7),对靠近上部安装面弯曲相对较大位置适当加强。在随后的伺服扫频过程中69.14 Hz位置的峰值没有出现,显著地提高了二级稳定吊舱的性能。
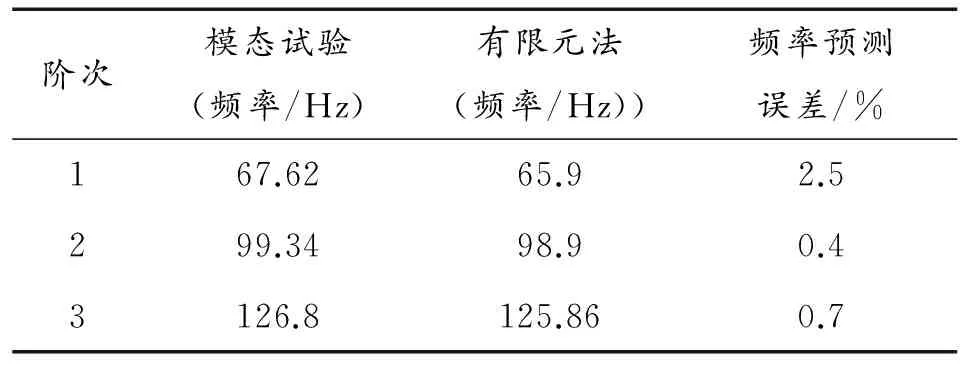
表2 仿真与试验结果
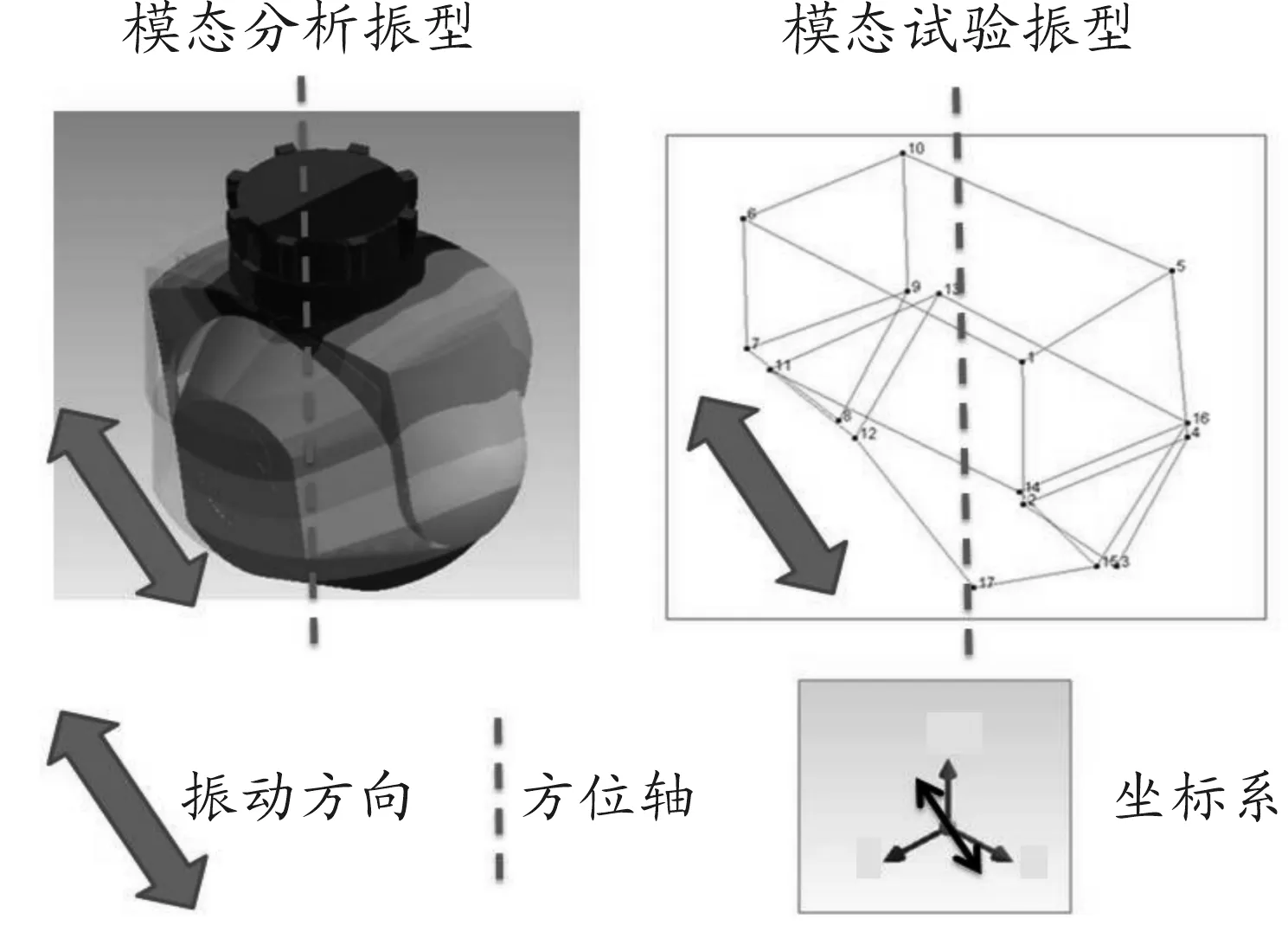
图7 振型视觉匹配
5 结论与展望
瞄准吊舱的动态特性十分复杂,大多数情况下无法直观显示,从仿真和测试分析中可以快速定位影响伺服性能的结构薄弱环节。在实际设计工作中,结构仿真和测试技术已经逐渐成为设计人员的基本功,仿真和测试工作设计化是未来瞄准吊舱仿真和测试技术发展的方向。除了仿真软件和测试设备的易用性,甚至“傻瓜化”以外,对光电稳瞄系统仿真和测试技术建立简单直观的流程规范亦体现了易用性的内在要求。本文通过对先进瞄准吊舱全链路的仿真-测试流程阐述了这样的思想。基于以上分析,得到如下结论:
1) 选择合理的试验工装可以降低甚至消除其对吊舱本身动态特性的影响,也能更好的满足伺服工程系统调试的要求;
2) 瞄准吊舱双模并行的简化方法不仅能够使仿真模型合理简化,分析过程高效迅速,所占用的资源也大为降低。也能获得较为准确的模型动态特性;
3) 传感器内外环对称安装布局能够很好地模拟瞄准吊舱整体模态振型,而仿真与测试之间通过简单的频率区间逼近和直观的振型动画匹配能快速的验证仿真分析结果。
[1] HILKERT J M,DAVID L A.Structures Effects and Techniques in Precision Pointing and Tracking Systems-A Tutorial Overview[J].SPIE,2010,76961C:1-12.
[2] 吴晗平,易新建,杨坤涛.机械结构因素对光电跟踪伺服系统性能的影响[J].应用光学,2004,25(3):11-14.
[3] 甘至宏,张葆,撖梵梵.机载光电稳定平台框架结构工程分析[J].光学精密工程,2008,16(12):2441-2446.
[4] 徐飞飞,纪明,解静,等.FSM在高精度瞄准线稳定系统中的应用研究[J].应用光学,2012,33(1):9-13.
[5] 张璟玥,纪明,王惠林.机载稳瞄控制系统模型及仿真分析[J].应用光学,2006,27(6):491-496.
[6] 白钊,贺峻峰,迟圣威,等.小型化多视场电视摄像系统光机设计研究[J].应用光学,2016,37(2):157-161.
[7] 迟圣威,纪明,韩周鹏,等.基于两阶段法的机载光电吊舱气动力矩的工程计算方法[J].电光与控制,2016,23(4):74-80.
[8] 迟圣威,朱镭,杨光,等.某机载光电吊舱热环境下光轴平行性建模与分析[J].机械与电子,2014,34(4):46-49.
[9] 王明超,杨光,张卫国,等.基于动力学模型修正的螺纹连接结构建模[J].振动与冲击,2015,34(23):161-165.
[10]张力,刘斌.机械振动实验与分析[M].北京:清华大学出版社,2013:140-186.
[11]刘耀,黄玉美.树脂矿物床身模态参数辨识[J].西安理工大学学报,2013,29(2):133-137.
(责任编辑 周江川)
Engineering Method of Advanced Targeting Pods Dynamic Simulation and Test
CHI Sheng-wei, ZUI Lei, LI Shi-yao, HAN Rui, WANG Ming-chao, SHI Dao-yun
(Xi’an Institute of Applied Optic, Xi’an 710065, China)
Servo unit and structural unit of stabilized sighting pods had a strong coupling relationship. In order to make the system obtain good servo characteristics, system resonance had to be suppressed. We got system resonance with generate frequency-sweep by a motor. And we given stabilized sighting pod analysis model based on the dual parallel mode simplified method of quality characteristics and load transfer path, and detailed designed and implemented modal testing plan. Finally, a double evaluation method based on the frequency range approximation and vibration visual match cam to quickly identify models was peoposed. The results between simulation and test had direct, quick closed-loop verification. And simulation-test link is that traditional designer could easy to learn, which meets strong engineering practicality.
advanced targeting pod; servo characteristics; dual-mode parallel simplified method;model validation;closed-loop verification; simulation-test link
2016-10-11;
2016-11-09 基金项目:“十二五”兵器预研支撑基金项目(6202070139)
迟圣威(1983—),男,博士研究生,工程师,主要从事光电吊舱结构设计、仿真与优化技术研究。
10.11809/scbgxb2017.03.004
迟圣威,朱镭,李世尧,等.先进瞄准吊舱动态特性仿真与测试的工程化方法[J].兵器装备工程学报,2017(3):18-21.
format:CHI Sheng-wei, ZUI Lei, LI Shi-yao, et al.Engineering Method of Advanced Targeting Pods Dynamic Simulation and Test[J].Journal of Ordnance Equipment Engineering,2017(3):18-21.
V271.4;TN30
A
2096-2304(2017)03-0018-04
猜你喜欢
建材发展导向(2022年18期)2022-09-22
科学大观园(2022年14期)2022-07-17
北京航空航天大学学报(2022年6期)2022-07-02
工业建筑(2022年2期)2022-06-29
兰州交通大学学报(2022年2期)2022-04-26
航天工业管理(2020年9期)2020-12-28
铁路技术创新(2020年6期)2020-02-25
空气动力学学报(2018年6期)2018-12-03
航空模型(2016年10期)2017-05-09
