微动机器人视觉伺服控制系统优化
2017-04-10 12:05苑隆寅耿元芳
实验室研究与探索 2017年1期
苑隆寅, 王 哲, 耿元芳
(重庆邮电大学 移通学院,重庆 401520)
微动机器人视觉伺服控制系统优化
苑隆寅, 王 哲, 耿元芳
(重庆邮电大学 移通学院,重庆 401520)

基于双目显微视觉伺服控制和透视成像原理,优化了双目显微视觉伺服控制模型。结果表明:设计的视觉模型不再含有深度信息,直接采用了图像信息从场景中获取视觉信息,图像特征点的误差向量在0~2 s范围内一直收敛到0;当微立方体处于焦平面上时,图中微立方体形状有微小的变化,这表示物体到摄像机的距离是有微小变化的,深度信息是变化的。设计的模型不再需要测量或估计未知点的深度信息,能够实现准确、快速地获取深度信息,实现了微动机器人视觉伺服控制系统优化。
显微视觉; 图像信息; 透视成像
0 引 言
视觉伺服控制主要是机器视觉的闭环控制,从而使控制目标能够最快地接近目标。自Hutchinson提出了单目视觉伺服控制的模型后,其需要了解被控对象的深度信息的问题不断被放大[1-2],于是提出了双目视觉伺服控制方法,随着研究的深入,研究人员发现对微小物体操作成为了该领域应用的主要方向[3-6]。上述微操作系统控制问题涵盖了微机电系统(MEMS)、生物细胞注射、外科手术等多个学科,在微操作技术领域中,显微视觉是一个关键的因素,而显微镜作为一个重要的传感器,起到了指导操作的作用[7-9]。如果操作系统中缺少显微镜,系统将不能自动地处理常规的操作,关键的数据也获取不了[10-12]。通过显微镜获取到的这些视觉信息,可用于控制微操作中的一些参数而使系统能够实现自动控制。显微视觉目前已经应用在微操作系统的很多领域,例如对微物体的位置反馈和物体的抓取以及对微物体的过程检测,物体微变形的定性测量[13-15]。体视显微镜在图像的传输实时性、实时立体成像观测、3D数据获取、使用环境等方面具有独特的优点。基于上述发展背景,本文基于视觉伺服控制进行双目显微视觉伺服控制改进研究,且选用体视显微镜作为微操作系统的视觉传感器。
1 伺服控制
双目显微视觉伺服系统由光学显微镜、操作平台、微操作臂和2个安装在目镜上的CCD摄像机构成。采用标准的立体视觉配置结构:两摄像机平行安装在显微镜的目镜上,其成像平面称为I1平面与I2平面。两成像面的水平轴同线,y轴相同,z1、z2表示两摄像机的光轴,并与X-Y平面垂直。两镜头中心距离O1-O2为B,原点O位于B的中心点。焦距为f,Σw和Σc分别表示世界坐标系和摄像机坐标系且两坐标系完全重合。系统的结构图如图1所示,成像的几何图如图2所示。
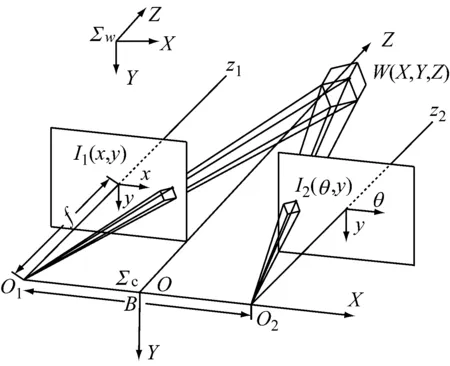
图1 视觉系统结构图
本文假定目标为静止的物体且由一系列的物点组成,为了便于计算,首先取其中1点进行计算。在双目视觉伺服系统中cve和cωe分别表示微操作臂末端执行器在摄像机坐标系下的平移速度和旋转速度,表示为u=(cve,cωe),mi=[x,y,θ]T∈R3表示第i个物点的特征点映射到成像平面上的图像坐标。则图像特征点mi和速度u的关系可表示为
(1)
其中:J(m)反映了图像特征与微操作臂位姿变换关系的矩阵,即图像雅克比矩阵。
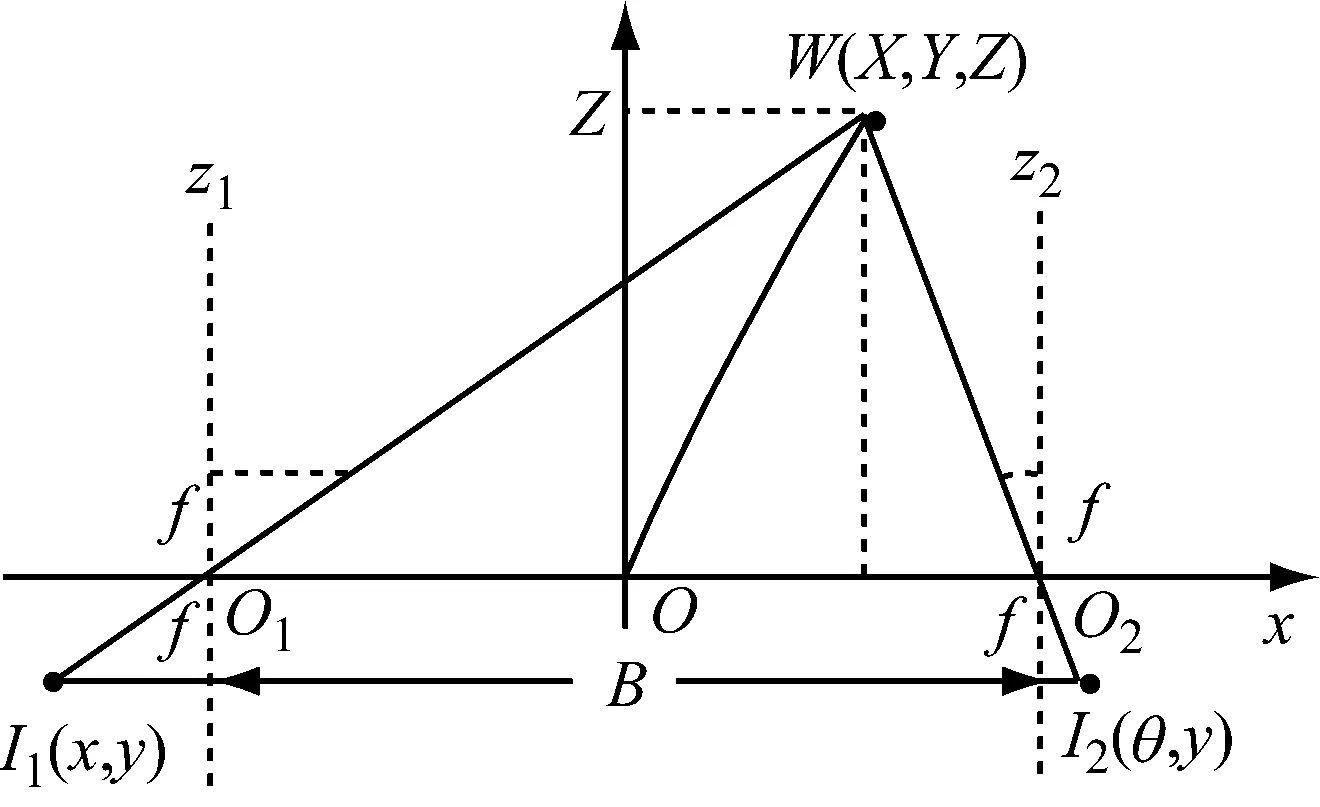
图2 几何结构图
根据小孔成像原理,物点
和成像在I1(x,y),I2(θ,y)平面上的图像特征点的关系为:
(2)
(3)
(4)
根据式(2)和(4)可得
(5)
对式(2)~(4)求导
(6)
根据在变化的坐标系下一个运动点的速度关于一个固定坐标系的一般公式,可推出物点W与u的关系为

(7)
将式(7)代入(6)可得:
(8)
由式(2)可推出
(9)
联立式(5),(8)和(9)可得:
(10)
从式(10)中可得:
(11)
其中,J(m)∈R3×6即为本文所提出的新的显微立体视觉模型,此模型不含深度信息,在物体深度未知或者时变时,不需要估计或测量其深度信息。
假定目标物体是由k个特征点构成的,即m=[m1,m2,…,mk]T∈R3k,则表示wv=-wv个图像特征点的雅克比矩阵为:
(12)

2 系统仿真
通过图像处理方法获取目标物体的4个顶点作为特征点进行系统的仿真实验,特征点单位为pixels。微操作臂的初始空间关节分别为:α=72 626 pixels/m。λ=0.11 m,B=0.027 m,其相关参数如下:杆1长l1=2.6 mm,杆2长l2=2.1 mm,杆1重心lc1=1.35 mm,杆2重心lc2=4.206 mm,杆1质量m1=13.8×10-3kg,杆2质量m2=3.72×10-3kg,杆1惯量I1=8.266 8×10-7kg·m2,杆2惯量I2=5.8×10-6kg·m2,重力加速度g=9.805 m/s2。
仿真结果如图3~6所示。从图2能够验证图像特征点的误差向量在0~2 s是一直收敛到0。由图4和5可见,随着时间的变化,图像特征点也会随之变化,并趋向期望图像特征点。且从图中能够方向验证的目标是微小的立方体,当微立方体处于焦平面上时图中微立方体的形状有微小的变化,这表示物体到摄像机的距离是有微小变化的,即深度信息是变化的。
图6则进一步阐释了其中4个图像特征点的位置误差,从图中结果可证明设计双目控制模型的有效性。
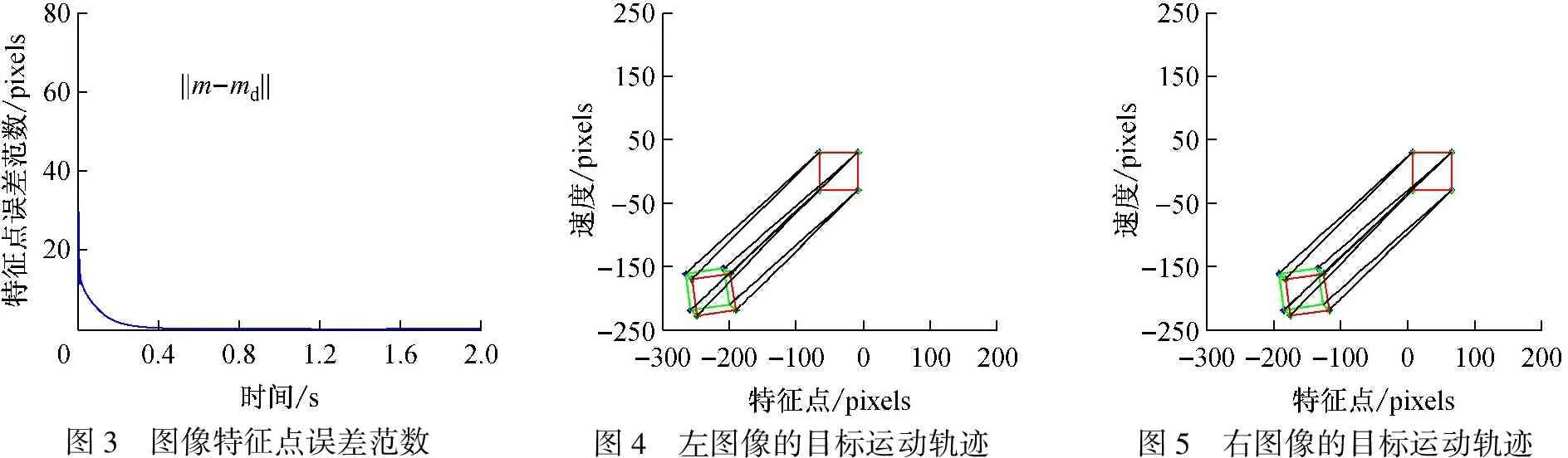
图3 图像特征点误差范数图4 左图像的目标运动轨迹图5 右图像的目标运动轨迹
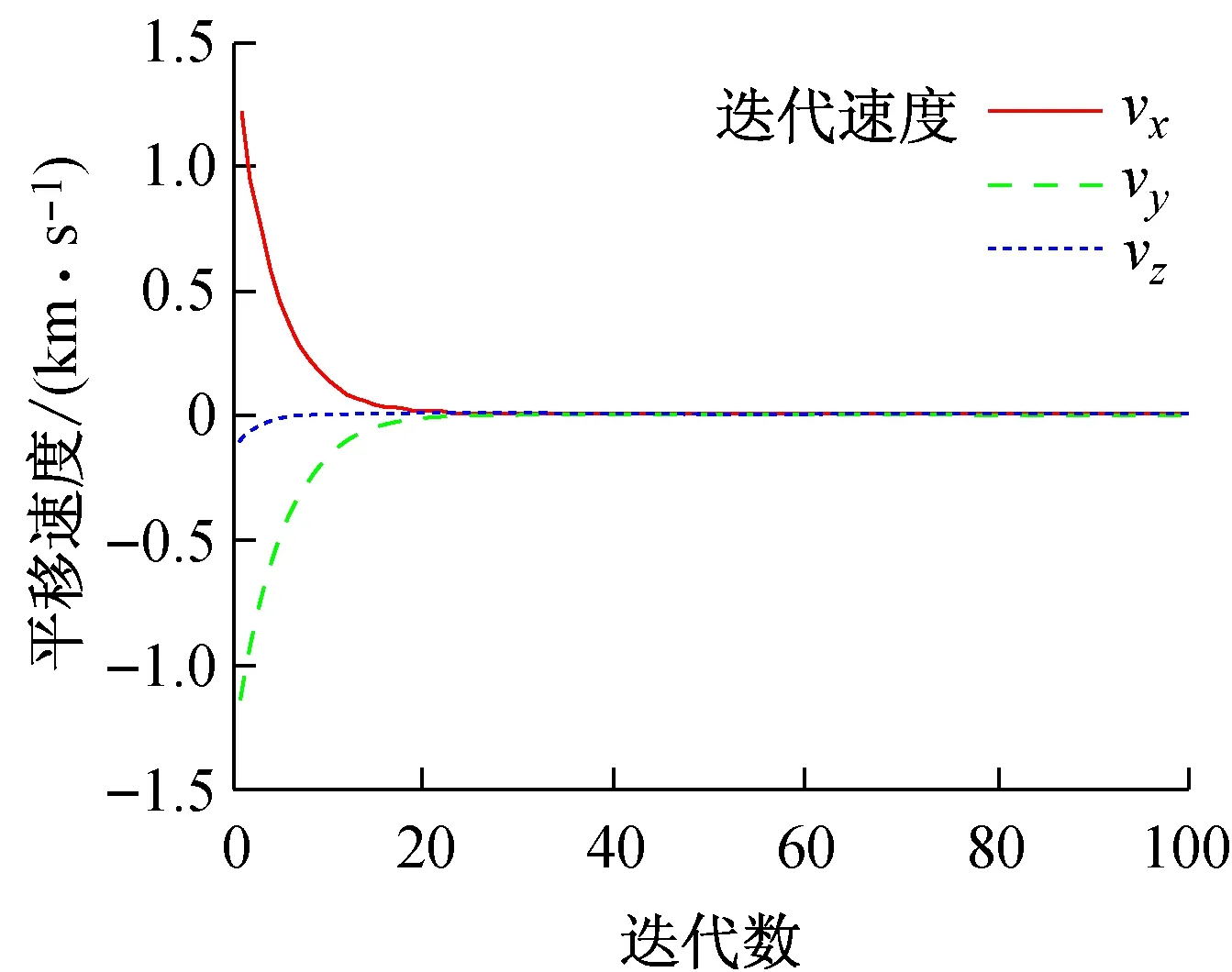
图6 微动平台的速度曲线
3 结 语
本文针对双目显微视觉伺服控制系统,基于针孔透视成像原理,推导出了双目显微视觉伺服控制模型。此视觉模型不含深度信息,直接利用图像信息可以从场景中获取视觉信息且不需要测量或估计未知点的深度信息,实现了准确快速获取深度信息,从而提高了系统的控制性能。
[1] 陈姿言,吴逢铁,何 西,等.体视显微镜与CCD成像系统在高阶贝塞尔光束光斑测量中的应用[J].强激光与粒子束,2014,26(11):27-32.
[2] 吴 磊,阳 宁,刘 俊,等.腹腔镜与显微镜下精索内静脉高位结扎术治疗精索静脉曲张的比较[J].实用医学杂志,2016,32(5):764-767.
[3] 罗 兵,夏大海.扫描电化学显微镜原位表征pH值对核电蒸汽发生器合金腐蚀行为的影响[J].物理化学学报,2014,12(1):59-66.
[4] 张 迁,苏宏伟,韩 磊,等.显微镜下三种精索静脉结扎术治疗精索静脉曲张的临床比较[J].山东医药,2016,56(16):88-89.
[5] 李 鹏,张常麟,王文学,等.扫描离子电导显微镜的研制与实现[J].红外与激光工程,2014,10(6):1894-1898.
[6] 孙 志,王 暄,韩 柏,等.聚酰亚胺薄膜表面电荷的开尔文力显微镜研究[J].中国电机工程学报,2014,32(12):1957-1964.
[7] 翟永平,刘云辉,周东翔,等.稀疏图像内容情况下显微镜自动聚焦算法?[J].软件学报,2013,17(5):1281-1294.
[8] 牛海玉,肖利娟,韩博平,等.采用倒置显微镜法定量浮游植物的数据稳定性[J].湖泊科学,2016,28(1):141-148.
[9] 张桂荣,屈玉福.改进堆栈调焦的显微镜景深扩展技术研究[J].仪器仪表学报,2014,12(z2):84-88.
[10] 朱 君,秦柳丽,宋树祥,等.SPASER技术的MIM波导放大器特性分析[J].红外与激光工程,2016,45(3):0320002-1-0320002-7.
[11] 孙丽存,孟伟东,李 强,等.电子目镜显微镜景深的确定与测量[J].光学精密工程,2013,21(5):1151-1159.
[12] 曹海青,王 渝,杜明芳,等.基于局域预测的动载天线伺服控制策略研究[J].电波科学学报,2014,29(1):106-113,134.
[13] 方春恩,李 伟,杨立锋,等.采用模糊控制和脉冲宽度调制技术的同步真空开关位置伺服控制器设计[J].高电压技术,2012,38(6):1327-1333.
[14] 孙 航,韩红霞,曹立华,等.大型光电经纬仪速度环PID参数模糊自整定研究[J].仪器仪表学报,2013,34(10):2388-2394.
[15] 幸 权,唐 猛,张 兵,等.电机伺服控制PDF策略频域设计方法优化[J].测控技术,2014,33(11):85-88.
Optimization of Micro Robot Visual Servo Control System
YUANLong-yin,WANGZhe,GENGYuan-fang
(College of Mobile Telecommunications, Chongqing University of Posts and Telecommunications, Chongqing 401520, China)
Current monocular visual servo control of a micro robot needs to know the depth of the controlled object. In order to improve the microscopic visual servo control performance, visual servo control is designed based on binocular microscope and X-ray imaging principle, the binocular microscope visual servo control is optimized. The verification results show that the design of the visual model no longer contains depth information, and applies directly to the image information from the visual information in the scene. The error of image feature point vector is in the range of 0 ~ 2 s and always converges to zero. When the cube in the focal plane figure has small change, it means that the distance of the object to the camera has small change, depth of information is changing. Design of the model no longer needs to measure or estimate the unknown point depth information, hence it can realize accurate and fast for depth information, realize the optimization of micro robot visual servo control system.
microscopic vision; image information; X-ray imaging
2016-04-22
国家自然科学基金资助项目(90922007)
苑隆寅(1973-),男,四川广安人,硕士,副教授,现主要从事于数字资源利用和信息系统工程。
Tel.:13883188676;E-mail:yaoyangokok@163.com
TP 242
A
1006-7167(2017)01-0022-03
猜你喜欢
天天爱科学(2022年4期)2022-11-08
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
小学科学(学生版)(2019年11期)2019-12-09
电子制作(2019年20期)2019-12-04
测控技术(2018年4期)2018-11-25
儿童故事画报·发现号趣味百科(2016年7期)2017-02-08
中国公共安全(2017年11期)2017-02-06
办公自动化(2016年18期)2016-12-17
现代计算机(2016年11期)2016-02-28
新闻前哨(2015年2期)2015-03-11