
安川MP系列控制器与多台PC机基于多通道通信的设计与实现
2017-04-21 05:49沐超刘小勤秦来安张固
电气自动化 2017年2期
沐超, 刘小勤, 秦来安, 张固
(1.中国科学院 安徽光学精密机械研究所,安徽 合肥 230031;2.中国科学技术大学,安徽 合肥 230026)
安川MP系列控制器与多台PC机基于多通道通信的设计与实现
沐超1,2, 刘小勤1, 秦来安1, 张固2
(1.中国科学院 安徽光学精密机械研究所,安徽 合肥 230031;2.中国科学技术大学,安徽 合肥 230026)
随着现代工业系统的结构日益复杂化,在工业控制中PLC控制器往往需要与多台上位机设备建立通信连接。以安川MP系列控制器为例,阐述了与多台PC上位机建立连接的原理和实现。详细介绍了安川MP系列控制器基于多传送缓冲器通道机制通信的基本原理。提出采用MSG-RCV通信函数实现控制器与多台PC机通信的方法,并编程实现。对通信效率与控制器高速扫描周期之间的关系进行了分析和讨论。
安川MP系列控制器;多传送缓冲器通道机制;MSG-RCV;高速扫描周期
0 引 言
在现代工业自动化生产中,由主控计算机(PC)与可编程逻辑控制器(PLC)组成的工业控制系统已成为主流的系统结构[1]。通过PC上位机对PLC下位机的数据存储器进行读写操作,来完成对现场设备的时序控制和数据采集等工作,从而实现人机接口通讯的功能。实际的工业生产中由于工程需求,控制系统往往不只有一台上位机,而许多品牌PLC自带通信方式只能与上位机建立一对一的通信,不能满足与多台上位机通信的设计需求。针对此问题本文以安川MP系列控制器为例,阐述PLC与多台PC上位机建立一对多通信的原理及设计方法。
1 安川MP系列控制器为从站时的两种通信方式
在与PC上位机通信时,安川MP系列控制器作为从站,其主要工作是接收由主站(PC上位机)发送的指令数据,并返回响应[2]。安川MP系列控制器提供了两种接收信息的通信方式。
1.1 使用自动接收功能通信
如图1所示,自动接收是指无需人工编写通信梯形图程序,控制器系统通过中断每隔50 ms的下位机低速扫描自动执行信息接收处理。自动接收是安川MP系列控制器通信模块自带的通信方式,如安川通信模块218IFA默认设置传送缓冲器通道CNO 01为自动接收通道,使用此通道可自动接收由上位机发送的指令数据。传送缓冲器通道是指由安川控制器通信模块提供的用于系统通信函数与传送设备之间数据交换的数据缓冲器,该数据缓冲器由单个或多个通道所构成,各通道由“缓冲器通道编号”来加以区分[3]。使用自动接收功能通信实现过程较为简单,但通信速度较慢,灵活性差。

图1 使用自动接收功能通信处理的执行调度
1.2 使用自编MSG-RCV函数的梯形图程序通信
安川MP系列控制器系统通信函数MSG-RCV主要用于接收由远端主站设备通过指定线路发送的信息数据。MSG-RCV函数由7个输入项目和3个输出项目构成,其输入项目“Execute”和“Abort”必须通过梯形图程序切换“ON/OFF”状态来执行处理。使用自编MSG-RCV函数建立通信虽然需要编写梯形图程序,但相对于自动接收方式灵活性强。使用MSG-RCV函数可以在梯形图中变更寄存器的读写偏移和读写范围,在调试过程中可以通过梯形图监视通信处理结果和通信状态。相比低速扫描中处理自动接收的通信方式,在高速扫描中调用含有MSG-RCV函数的梯形图程序来进行通信,可实现更快的信息接收,如图2所示。

图2 MSG-RCV函数规格
2 实现控制器与多台PC上位机建立一对多通信的方法
2.1 多传送缓冲器通道机制
安川MP系列控制器不同型号的通信模块都提供了多个传送缓冲器通道,如218IFA通信模块提供了4个通道,218IF通信模块提供了10个通道。每个传送缓冲器通道的使用代表了控制器与外部设备一条通信连接线路的建立,使用多个传送缓冲器通道可以实现控制器与多台PC上位机建立一对多的通信,通信模块的传送缓冲器通道数反映了与控制器同时建立通信的最大PC上位机数目。而控制器通信模块默认只设置传送缓冲器通道CNO 01为自动接收通道,其它通道不能重复设置为自动接收通道,故安川MP系统控制器自带的通信方式只支持一对一的通信,并不能实现与多台PC上位机建立一对多的通信,建立多通道通信需使用自编MSG-RCV函数的梯形图程序来实现。
2.2 使用自编MSG-RCV函数的梯形图程序实现多通道通信
根据工程需求来选定和配置用于建立通信的传送缓冲器通道,每个通道分别需要通过编写独立的含有MSG-RCV函数的梯形图程序来启用,通过对MSG-RCV函数“通道编号”和“连接编号”参数项的设定来实现传送缓冲器通道与实际连接线路的一一关联,从而进行多通道信息接收[4]。通信模块中传送缓冲器通道CNO 01可设置为自动接收通道,也可以设置为非自动接收通道,即通过使用自编MSG-RCV函数的梯形图程序来启用,但若通道CNO 01自动接收功能设为有效,在梯形图中执行相应的MSG-RCV函数,会造成内存容量及执行时间的浪费。由于在高速扫描中执行MSG-RCV函数比低速扫描中处理自动接收速度要快,所以推荐使用自编MSG-RCV函数的梯形图程序来实现通道CNO 01的通信。
3 多通道通信的设计与实现
3.1 硬件配置与连接
如图3所示,安川MP系列控制器可使用MPE720软件对通信模块中的传送缓冲器通道进行配置通信相关信息。以通信模块218FA为例主要配置信息包括:
(1)连接编号CNO:控制器在进行通信时,以CNO来区分不同上位机,该连接编号也将用于MSG-RCV函数的参数列表(PARAM)中参数项“对方连接编号(PARAM02)”的设定。
(2)Local Port:指定各连接所对应的通信模块使用的端口编号。
(3) Node IP Address和Node Port:设定各连接所对应的PC上位机的IP地址和端口编号,设定时确保目的IP和端口号没有与其它连接发生冲突。
(4)Connect Type:选择传输层的协议(TCP/UDP)
(5)Protocol Type:选择应用层的协议(扩展MEMOBUS/MODBUS.)
(6)Code:选择传输数据类型(BIN/ASCII.)
(7)Automatic:将CNO 01自动接收功能设置为“Disable”。

图3 通信模块218FA参数设定
其它型号的通信模块配置与218FA类似,主要区别是提供的传送缓冲器通道数不同。安川MP系列控制器可使用Ethernet端口通过集线器与多台PC上位机建立连接,如图4所示。

图4 MP2310与多台PC上位机通信概念图
3.2 软件设计
3.2.1 上位机通信接口设计

图5 上位机通信接口设计流程图
在与安川MP系列控制器建立的通信网络中,多台PC上位机通过Ethernet接口连接至下位机通信模块,上位机通信接口程序可选用套接字编程语言来实现,上位机与下位机进行发送确认、数据传送等一系列的Socket通信处理。因实际工业控制现场对通信稳定性要求高,故选用基于TCP/IP协议的“三次握手”机制来进行通信接口设计[5]。在上位机接口设计中,安川MP系列控制器为服务器端被动监听由多台PC上位机发送出来的连接请求和指令信息,即PC上位机为客户端。通信网络中应用层选择扩展MEMOBUS协议,该协议为安川公司控制器的核心通信协议[6],相比传统的MEMOBUS协议,可以提供更丰富的功能和更高效的通信。在扩展MEMOBUS模式下,接收到来自主控制器(PC端)指令信息的子控制器(安川控制器)执行指定的功能代码,并向主控制器(PC端)返回响应信息。通过上述通信过程,主控制器可以读取单个或多个不连续的子控制器的线圈状态和寄存器内容,并可对其修改,从而实现对在多种生产现场的子控制器的集中监视和控制。运用扩展MEMOBUS协议封装通信数据信息,简化了上位机与下位机之间具体的通信过程[7],如图5所示。3.2.2 下位机通信接口设计
下位机安川MP系列控制器的通信接口设计主要是编写在高速扫描中被调用的含有MSG-RCV通信函数的梯形图程序。PLC在一个扫描周期内的工作过程包括5个阶段:CPU自诊断、写输出、读输入、执行程序和处理通信请求,控制器的高速扫描是指优先级最高的扫描处理,在高速扫描中进行通信处理可有效地提高了通信速度。在编写梯形图程序时,需定义MSG-RCV函数的输入项目,主要包括传送设备类别(Dev-Typ)、传送协议(Pro-Typ)、线路编号(Cir-No)、传送缓冲器通道编号(Ch-No)和参数列表首地址(Param)。同时需要设定参数列表中参数项“对方连接编号(PARAM02)”和参数项“写入范围(PARAM12、PARAM13)”,根据设计需求可通过设定参数列表中参数项“线圈偏移(PARAM08)”及“保持寄存器偏移(PARAM11)”来实现读写偏移。设置传送缓冲器通道编号(Ch-No)时,需确保同一线路中通道编号不会发生重复,并与参数项“对方连接编号(PARAM02)”保持设置一致,下位机需通过指定编号与多台PC上位机进行信息传送。每个用于建立通信的传送缓冲器通道都对应着一个独立的MSG-RCV函数来实现配置,如图6所示。
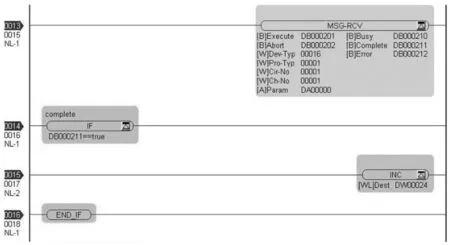
图6 调用MSG-RCV函数的梯形图程序
3.3 通信速度分析
MSG-RCV函数在执行过程中其输入项目“Execute”和“Abort”必须通过梯形图程序切换“ON/OFF”状态来执行处理。例如,通过梯形图将MSG-RCV函数的输入项目“Execute”置为“ON”来执行信息的接收处理,若需连续命令接收信息,必须在一次信息接收处理完毕后将“Execute”置为“OFF”一个扫描周期以上,用于下一次接收时置“ON”,如图7所示。

图7 MSG-RCV函数正常执行时序图
由MSG-RCV函数执行时序图可知,在控制器高速扫描处理中调用含有MSG-RCV通信函数的梯形图程序进行通信时,由于MSG-RCV函数输入项目与输出项目“ON/OFF”状态的切换与输出都是在每个扫描周期内完成,故一次通信处理需要在若干个高速扫描周期完成,高速扫描周期和个数决定了通信处理时间的长短。利用本文设计的程序进行了通信时间的测试,得到和验证了下位机高速扫描处理中调用MSG-RCV函数进行通信时,每次通信时间为4~5个高速扫描周期。测试结果如表1所示。实际工程需要可利用本文分析结果,通过合理地设置下位机的高速扫描周期来有效地提高通信效率[8]。

表1 高速扫描周期与通信时间对照
4 结束语
基于多传送缓冲器通道机制,安川MP系列机器控制器实现了与多台PC上位机建立通信连接。相比于控制器自动接收的通信方式,使用在高速扫描中调用含有MSG-RCV函数的梯形图程序进行通信不仅可以实现多通道通信,还有效地提高了通信效率。本论文所提出的方法对其他品牌PLC与PC上位机通信具有借鉴作用。
[1] 李慧,卫兵,王浩君,等.基于PROFIBUS-DP的ABB机器人与安川MP2310的数据通讯[J].制造业自动化,2014,3(6):34-35.
[2] 张杨,刘宁.PLC与多台上位机PC在局域网中的通信研究[J].机电信息,2015,1(2):13-15.
[3] 高其敏.安川MP2000系列机器控制器以及同步控制的应用[J].伺服控制,2005,15(2):101-102.
[4] 张连第.多轴直线电机运动与定位工业以太网控制技术[D].合肥:合肥工业大学,2012.
[5] 谢希仁.计算机网络[M].5版.北京:电子工业出版社,2008.
[6] 姬琪,王红园.基于MEMOBUS协议的多轴电机控制系统设计[J].电子测量技术,2013,6(5):56-57.
[7] 周敏,李凤婷,吴为民.基于VB的PC机与多台PLC的通信研究[J].计算机工程,2009,12(3):23-24.
[8] 史建民,黄有方,赵婉莹.基于Memobus RTU通信协议的PLC数据优化组合传送方法[J].上海海运学院学报,2003,8(18):67-69.
Design and Implementation of Multi-channel Communication between Yaskawa MP Series Controller and PCs
Mu Chao1,2, Liu Xiaoqin1, Qin Laian1, Zhang Gu2
(1.Chinese Academy of Sciences Anhui Institute of Optics and Fine Mechanics, Hefei Anhui 230031,China; 2. University of Science and Technology of China, Hefei Anhui 230026, China)
With increasing complexity of the structure of modern industrial systems, PLC controllers used for industrial control often need to establish communication connection with several upper computers. Taking Yaskawa MP series controller as example, this paper describes the principle and implementation of the establishment of communication between it and several upper PCs, gives details about the basic principle of communication of Yaskawa MP series controller based on multiple conveyance buffer channel mechanism, and proposes adoption of MSG-RCV communication function to realize communication between the controller and PCs through programming. Furthermore, the relationship between communication efficiency and the high-speed scanning period of the controller is also analyzed and discussed.
Yaskawa MP series controller; multiple conveyance buffer channel mechanism; MSG-RCV; high-speed scanning period
10.3969/j.issn.1000-3886.2017.02.006
TM762
A
1000-3886(2017)02-0019-03
沐超(1988-),男,安徽人,硕士,主要研究方向为先进半导体技术。 刘小勤(1967-),女,安徽人,研究员,主要研究方向为计算机应用技术。 秦来安(1983-),男,河南人,副研究员,主要研究方向为精密仪器及机械。 张固(1995-),男,安徽人,硕士,主要研究方向为先进半导体技术。
定稿日期: 2016-09-05
猜你喜欢
轻兵器(2022年3期)2022-03-21
铁道车辆(2021年4期)2021-08-30
中国设备工程(2018年21期)2018-11-14
车迷(2018年12期)2018-07-26
中国老区建设(2016年3期)2017-01-15
装备制造技术(2016年11期)2017-01-09
山东工业技术(2016年15期)2016-12-01
科学与财富(2016年28期)2016-10-14
现代职业教育·高职高专(2016年7期)2016-07-09
现代制造技术与装备(2016年9期)2016-04-05
