
用于机动目标跟踪的自适应交互式多模型算法*
2017-04-24 07:58周德云刘建生西北工业大学电子信息学院西安7007北方自动控制技术研究所太原00006西北机电工程研究所陕西咸阳7099
火力与指挥控制 2017年3期
王 越,周德云,刘建生,赵 凯,杨 维(.西北工业大学电子信息学院,西安 7007;.北方自动控制技术研究所,太原 00006;.西北机电工程研究所,陕西 咸阳 7099)
用于机动目标跟踪的自适应交互式多模型算法*
王 越1,周德云1,刘建生2,赵 凯3,杨 维3
(1.西北工业大学电子信息学院,西安 710072;2.北方自动控制技术研究所,太原 030006;3.西北机电工程研究所,陕西 咸阳 712099)
针对当前统计模型对弱机动或非机动目标跟踪效果不理想等问题,提出了一种修正当前统计模型与匀速模型的自适应交互式多模型算法,可在线修正当前统计模型的加速度极限值,调整过程噪声方差,提高了当前统计模型的自适应性。同时,通过在常规匀速模型中引入机动检测机制,抑制了常规匀速模型对机动目标跟踪的滤波发散,通过引入强跟踪算法,增强了模型对目标突发机动的自适应跟踪能力。仿真结果表明,该算法充分发挥了当前统计模型和交互式多模型算法的优势,对强机动和弱机动目标都具有很好的效果。
机动目标跟踪,交互式多模型,“当前”统计模型,机动检测
0 引言
机动目标跟踪[1-2]算法大致可分为单模型类算法和多模型类算法。单模型类算法主要包括机动检测算法以及自适应算法,其中可调白噪声法,变维估计法和输入估计法属于机动检测算法[2],而Singer模型、当前统计模型[3]、Jerk模型[4]则属于自适应算法。机动检测算法计算量小,但跟踪精度不高,对目标机动存在较大延时。自适应跟踪算法通过实时调整滤波器结构实现自适应跟踪,跟踪结果比较平稳,但此类算法依赖于对目标机动特性的合理假设,当假设不符时,算法性能有所折扣[5-9]。交互式多模型算法[10]已被证明是一种很有效的机动目标跟踪算法。但若多模型集合中的所有模型均与目标机动不匹配,则会存在较大系统偏差,通过增加模型数量不仅会引起计算量的增加,同时也会加剧模型间不必要的竞争导致性能下降[11-14]。
本文提出一种适用于机动目标跟踪的自适应交互式多模型算法,模型集合采用修正当前统计模型与具有机动检测匀速模型的模型集合。两个模型都具备根据目标机动情况自适应调节滤波器增益的能力。仿真结果表明,该算法对于强机动目标保持了当前统计模型很好的跟踪性能,同时有效地兼顾了非机动和弱机动目标的跟踪能力。
1 目标运动模型
1.1 具有机动检测的匀速(CV)模型
常规匀速模型并不具备自适应跟踪目标的能力,当目标具有明显的机动时,就会带来较大的系统误差,甚至有可能会导致滤波发散。可通过观测目标运动残差信息对目标机动进行检测,实时调整过程噪声方差矩阵,达到自适应调节滤波器增益的目的。为降低单次检验随机性的影响,构建加权平均的统计量
l为窗口长度,本文l=4。为保持对目标机动的快速响应,突出最新残差的作用,新量测数据的残差权重系数取较大值,本算法所选取的权重γ集合为γ={0.15,0.2,0.25,0.4}。显然服从自由度为nz的分布,其中nz是量测向量的维数。


1.2 修正当前统计模型
当前统计模型实质上是一种非零均值时间相关模型,其机动加速度的“当前”概率密度采用修正的瑞利分布描述,非零均值加速度为
经过离散化的当前统计模型状态方程为

关于式(10)中各矩阵的表达式可见参考文献[3]。为保持对目标机动的快速响应,加速度极限值通常取较大值,但加速度极限值取值较大,就会降低弱机动目标的跟踪精度。
交互式多模型算法中的模型概率ui(k)反映了当前时刻该模型与目标运动方式的匹配程度,可用当前统计模型的模型概率ucs修正加速度极限值,当目标处于弱机动状态时,ucs取值较小,当目标处于机动状态时,通过模型交互概率转移矩阵,ucs的取值又会变大,可达到加速度方差和过程噪声矩阵自适应调整的目的。修正当前统计模型加速度方差为

1.3 强跟踪滤波器
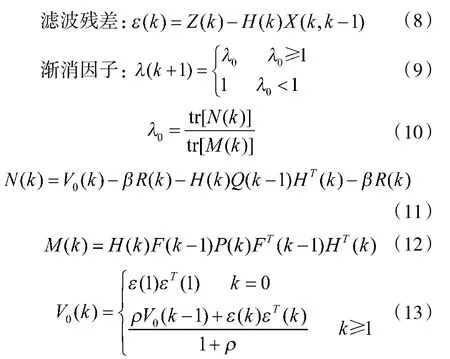
尽管经过修正当前统计模型能较好地跟踪机动目标,但当目标做阶跃机动或加速度突变时,其相应速度仍偏慢,本文在修正当前统计模型的基础上,借鉴强跟踪滤波器[15]的思想,引入渐消因子,实时调节增益矩阵,迫使残差序列依然保持正交,当目标突然机动时,强跟踪滤波仍然能保持对目标的有效跟踪。强跟踪滤波器流程如式(8)~式(13)所示。
式(17)中0≤ρ≤1,为遗忘因子,β≥1为弱化因子,根据仿真经验值确定。当目标运动状态发生突变时,强跟踪滤波器根据残差的增大而调整渐消因子,自适应调整滤波增益,提升了模型对目标运动突变跟踪的性能[16]。
2 自适应交互式多模型算法
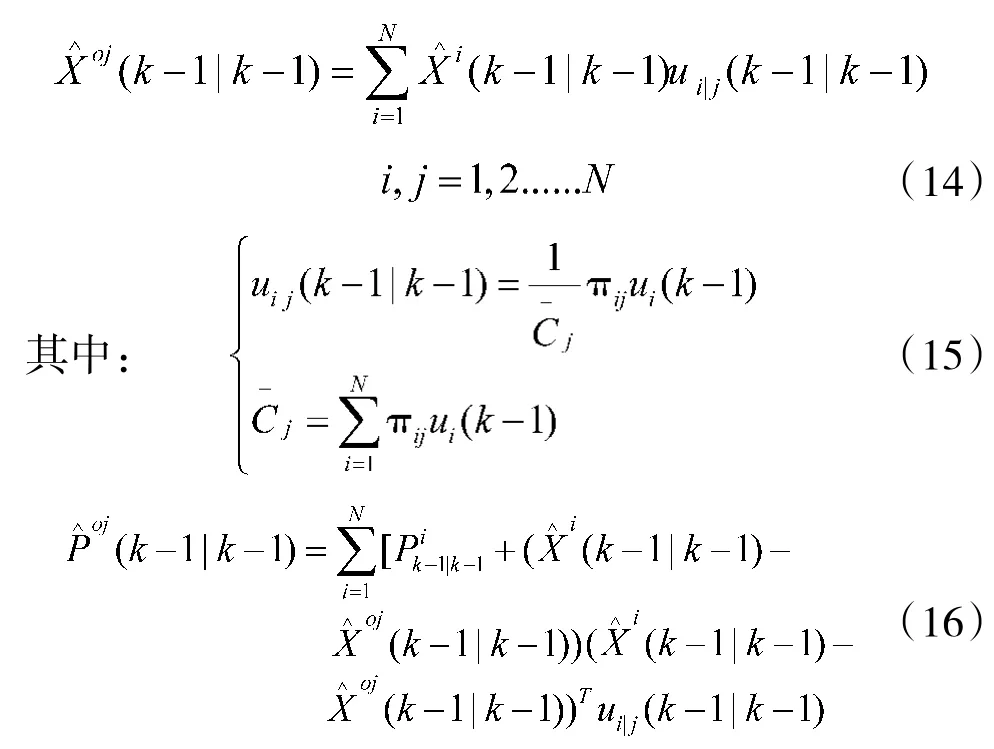
交互式多模型算法是对于目标的不同运动状态,采用不同的模型滤波器,各模型滤波器并行工作,模型之间的概率转移服从马尔科夫过程,估计结果为各模型估计的加权和[10]。本文提出自适应交互式多模型算法的模型集合采用修正当前统计模型与具有机动检测匀速模型的模型集合。算法流程如下:
1)输入交互
2)模型条件滤波
3)模型似然函数计算
4)模型概率修正
5)输出交互


3 仿真试验
为验证本文算法的有效性,对不同机动程度的目标进行了仿真。假定目标在水平面上机动飞行,起始初始位置(2 500 m,-2 000 m),0 s~30 s以(-100 m/s,100 m/s)的速度做匀速运动,30 s~60 s做加速度为(18 m/s2,15 m/s2)匀加速运动;60 s~90 s做加速度为(-12 m/s2,-12 m/s2)匀减速运动;90 s~120 s做加速度为(15 m/s2,-8 m/s2)匀加速运动;120 s~150 s目标恢复匀速运动;全航路时间为150 s。目标运动轨迹如图1所示。

图1 目标运动轨迹
修正当前统计模型中机动频率α为1/20,加速度极限值amax=50 m/s2,a-max=-50 m/s2。两个模型的初始概率均为0.5。模型转移概率矩阵为,, i,j=1,2。
假定采样周期为T=1s,测距噪声均方差为30m,两个坐标轴方向的量测噪声不相关,采用蒙特卡洛仿真,仿真次数为200次。图2、图3为目标X轴和Y轴方向位置RMSE曲线。
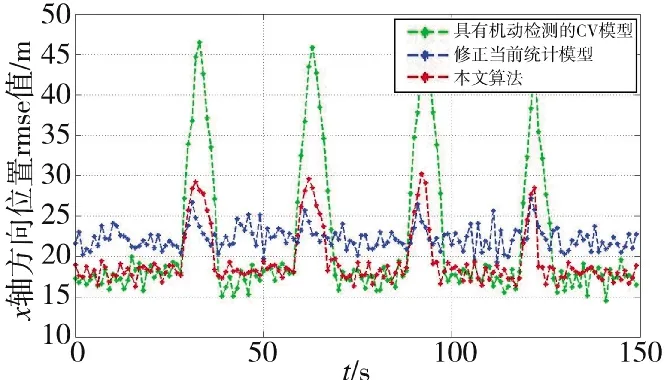
图2 目标X轴位置RMSE曲线
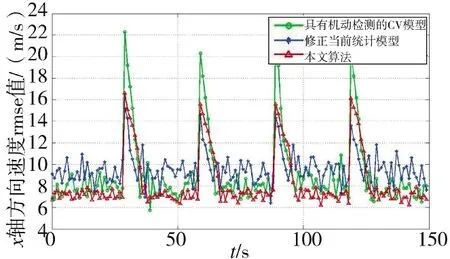
图4 目标X轴速度RMSE曲线

图5 目标Y轴速度RMSE曲线
从图2~图5仿真结果可以看出:
1)具有机动检测的CV模型在目标匀速飞行段精度较高,但对目标机动响应较慢,尤其是当目标做阶跃运动时,位置估计误差峰值较大。修正当前统计模型全航路的跟踪都很稳定,对目标1和目标2的机动响应较快,但在目标匀速飞行段,修正的当前统计模型相比于具有机动检测的CV模型位置和速度跟踪精度都不是很理想。
2)本文算法在目标匀速飞行段,跟踪效果接近于具有机动检测的CV模型,优于修正当前统计模型;当目标强机动时,位置估计误差和速度估计误差峰值较具有机动检测的CV模型有大幅减小,误差峰值和滤波收敛速度均接近于修正当前统计模型,是由于本文算法引入了强跟踪滤波器,使滤波模型快速响应目标机动。本文算法在滤波稳定后的位置估计精度和速度估计精度均优于修正的当前统计模型和具有机动检测的CV模型。
4 结论
本文研究了一种适用于机动目标跟踪的自适应交互式多模型算法,通过模型概率对当前统计模型的加速度极限值进行修正并与匀速模型进行交互,提高了算法对弱机动目标和非机动目标的跟踪能力,该算法通过引入强跟踪滤波器,既保持了当前统计模型对目标做机动快速响应,又保证了滤波精度。仿真结果表明,该算法能够很好地适应目标各种类型的机动,有很好的工程价值。
[1]LI X R,JILKOV V P.A survey of maneuvering targel tracking.PartⅠ:dynamic models[J].IEEE Trans on Aerospace and Elctronic Systems,2003,39(4):1333-1363.
[2]LI X R,JILKOV V P.A survey of maneuvering target tracking Part IV:decision based methods[C]//Proc.of the SPIE ConfeFence on Signal and Data Processing of Small Targets,2002:4728-4760.
[3]周宏仁,敬忠良,王培德.机动目标跟踪[M].北京:国防工业出版社,1991:20-25.
[4]QIAO X D,WANG B S.A motion model for tracking highly maneuvering targets[C]//Proc.of the IEEE Radar Conference,2002:493-499.
[5]王向华,覃征,杨慧杰,等.基于当前统计模型的模糊自适应跟踪算法[J].兵工学报,2009,30(8):1089-1093.
[6]李辉,沈莹,张安,等.交互式多模型目标跟踪的研究现状及发展趋势[J].火力与指挥控制,2006,11(11):1-4.
[7]刘望生,李亚安,崔琳.基于当前统计模型的机动目标自适应强跟踪算法[J].系统工程与电子技术,2011,33(9): 1937-1940.
[8]刘建书,李人厚,刘云龙.基于“当前”统计模型的交互式多模型算法[J].系统工程与电子技术,2008,30(7): 1351-1354.
[9]BAHARI M H,KARSZ A,KHALOOZADEH H.High maneuver target tracking based on combined Kalman filter and fuzzy logic[C]//Proc.of the IEEE Information,Decision and Control,2007:59-64.
[10]SHENG H,YANG J S,ZEG F L.Interacting multiple model tracking algorithm with modified input estimation[J].Acta Eleetronica Sinica,2009,37(12):2810-2814.
[11]QU H Q,PANG L P,LI S H.A novel interacting multiple model algorithm [J].Signal Processing,2009,89(11): 2171-2177.
[12]LEE B J,PARK J B,JOO Y H,et al.Interlligent Kalman filter for tracking a maneuving target[J].IEEE Pcoceedings:Radar,Sonar and Navigation,2004,151(6):344-350.
[13]LI Z G,DUAN H J.A novel Adaptive tracking alogrithm for maneuvering targets[C]//Proc.of the International Conference on Computer Design and Applications,2010:431-435.
[14]LI X R,JILKOV V P.Survey of maneuvering target tracking-Part V:multiple model methods[J].IEEE Trans.on Aerospace and Electronic Systems,2005,4l(4): 1255-132l.
[15]李洋,杜立夫,禹春梅.一种基于复合模型的机动目标跟踪算法[J].四川兵工学报,2015,36(5):127-132.
[16]周东华,叶银忠.现代故障诊断与容错控制[M].北京:清华大学出版社,2000:88-91.
Adaptive Interacting Multiple Model Algorithm for Maneuvering Target Tracking
WANG Yue1,ZHOU De-yun1,LIU Jian-sheng2,ZHAO Kai3,YANG Wei3
(1.School of Electronics and Information,Northwestern Polytechnical University,Xi’an 710072,China;2.North Automatic Control Technology Institute,Taiyuan 030006,China;3.Northwest Institute of Mechanical&Electrical Engineering,Xianyang 712099,China)
Aiming at the problem that the current statistical model has not a good performance on tracking non-maneuvering targets,the adaptive interacting multiple model algorithm based on modified current statistical model and constant velocity model is proposed.The algorithm could online modify the extreme value of acceleration and the variance of process noise in current statistical model,and the adaptability of current statistical model is improved.Meanwhile,maneuvering detection is introduced to restrain the filter divergence of the normal the constant velocity model,and tracking performance is enhanced for sudden maneuvering targets by introducing a strong track filter algorithm.The simulation results show that the algorithm takes full advantage of the current statistical model and the interactive multiple model algorithm,and has a good performance both on weak and strong maneuvering targets.
maneuvering target tracking,interacting multiple model algorithm,current statistical model,maneuvering detection
TP<271.4 class="emphasis_bold">271.4 文献标识码:A271.4
A
1002-0640(2017)03-0137-04
2016-02-05
2016-03-07
军队“十二五”专项预研基金资助项目(40404060102)
王 越(1985- ),男,江苏徐州人,博士研究生。研究方向:目标跟踪与数据融合。
猜你喜欢
快乐语文(2021年35期)2022-01-18
军事运筹与系统工程(2019年3期)2019-08-13
当代陕西(2019年12期)2019-07-12
电子制作(2019年11期)2019-07-04
华东师范大学学报(自然科学版)(2019年2期)2019-06-11
汉语世界(The World of Chinese)(2019年1期)2019-03-18
电子制作(2018年16期)2018-09-26
电子制作(2018年1期)2018-04-04
人间(2015年8期)2016-01-09
