
基于反馈解耦法的旋转火箭弹自适应控制系统设计*
2017-04-24 07:58阮政委周文雅张大力秦黎博大连理工大学航空航天学院辽宁大连116024
火力与指挥控制 2017年3期
阮政委,周文雅,张大力,秦黎博(大连理工大学航空航天学院,辽宁 大连 116024)
基于反馈解耦法的旋转火箭弹自适应控制系统设计*
阮政委,周文雅,张大力,秦黎博
(大连理工大学航空航天学院,辽宁 大连 116024)
火箭弹弹体的旋转将引起俯仰和偏航通道的强耦合,而且在飞行过程中,导弹的动力学参数在不断变化。这些因素加大了旋转火箭弹的控制系统设计难度。采用反馈方法实现了俯仰、偏航两通道的动态解耦,并利用模型参考自适应控制方法完成了两通道的控制系统设计。研究发现,所提方法很好地克服了耦合因素对控制系统的影响,提高了控制系统对动力学参数变化和外界干扰的鲁棒性,满足旋转火箭弹飞行控制系统设计要求。
旋转火箭弹,反馈解耦,自适应控制,鲁棒性
0 引言
旋转火箭弹作为一种对付固定目标、慢速机动目标的轻型战术武器,具有打击精度高,威力大,使用灵活,发射后不管,效费比高等优点。火箭弹能够利用自身的旋转改善气动不对称和推力偏心等干扰因素的影响,提高打击命中精度。与此同时,火箭弹在自旋飞行条件下,由于陀螺效应和马格努斯效应的影响,弹体的俯仰和偏航两通道间存在惯性和气动耦合作用。由于执行机构随弹体滚转,控制指令在传递过程中存在滞后,导致两通道间控制也存在耦合。加之在飞行过程中,火箭弹的动力学参数在不断变化。这些因素加大了旋转火箭弹飞行控制系统的设计难度。
针对旋转飞行器的控制通道耦合问题,袁天保[1]采用动态预补偿法,陈罗婧[2]和高天丰[3]采用前馈补偿法实现了解耦。在控制系统设计方面,基于经典的PID设计方法得到了广泛应用,但随着旋转火箭弹控制性能指标的不断提高,这种方法存在着不足:当系统的气动参数发生改变或受到外部干扰时,难以保证良好的控制效果。随着现代控制理论的发展,一些新控制方法被应用到导弹、火箭弹等飞行器上。陈法扬[4]利用自适应控制方法设计了火箭助飞鱼雷在飞行中段的控制系统,系统达到了抑制外界扰动的目的。史鲲[5]基于Popov超稳定性理论设计了导弹的模型参考自适应控制器,结果表明所设计的控制器具有良好的控制性能和鲁棒性。
综上所述,在设计旋转火箭弹的姿态控制系统时应首先进行解耦,且控制器对系统参数时变和外界干扰应具有强鲁棒性。本文分析了旋转火箭弹俯仰和偏航通道耦合的影响,采用反馈方法实现了两通道的动态解耦,利用模型参考自适应方法完成了解耦后两通道的控制器设计。
1 旋转火箭弹动力学模型
文中以某新型旋转火箭弹为研究对象。操纵力和操纵力矩呈周期性变化,且弹体的旋转频率远大于其固有频率,表现为对舵面偏转所产生操纵力的低通滤波特性。因此,弹体只能对舵偏在一个旋转周期内产生的平均操纵力作出响应。
以舵面随弹体旋转一周换向两次为例,说明周期平均操纵力的作用机理。假设控制系统理想工作,操纵机构无延迟,舵面的最大偏转角为±δm,控制信号的初始相位滞后φ角。图1给出一周换向两次的舵偏角和操纵力在空间的分布情况,控制信号极性和操纵力方向改变发生在点1和2处。图中ωx为弹体绕纵轴的平衡转速,Ox4y4z4代表准弹体坐标系。
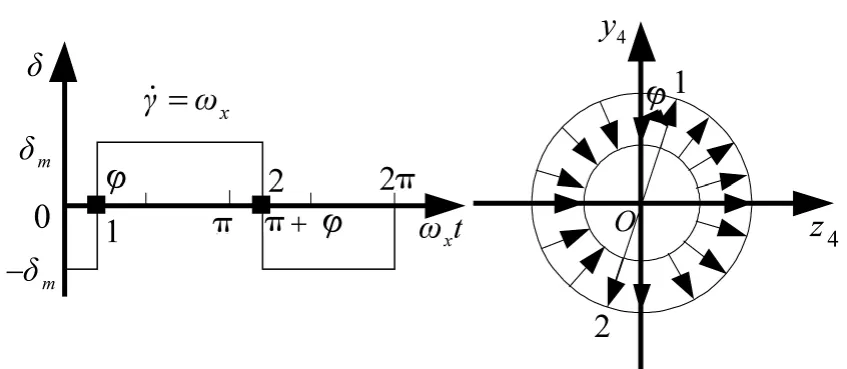
图1 操纵机构换向两次的舵偏和操纵力
在描述旋转火箭弹姿态运动方程时,采用等效舵偏角,同时建立舵面周期平均操纵力下的均态数学模型。文献[6]给出了基于上述假设的旋转火箭弹姿态运动方程:


式中,θ、ψV分别为弹道倾角和弹道偏角;ψ、ϑ分别为偏航角和俯仰角;β*和α*分别为侧滑角和攻角;Y、Z分别为升力和侧向力;My4、Mz4为准弹体坐标系下除操纵力矩外的所有力矩之和在y4和z4轴的分量;Mcy4、Mcz4为准弹体坐标系下操纵力矩在y4和z4轴的分量;γV*为速度倾斜角,它与β*、θ存在如下关系:

利用小扰动线性化方法对上述方程进行线性化,得到扰动运动方程如下:

通过拉氏变换,得到火箭弹的姿态传递函数:

由于Δδez和Δδey为理想动力学系统反馈信号,对弹体的控制作用还需要通过伺服系统实现。将舵机系统Wδ的传递函数用一阶惯性环节表示:

设准弹体坐标系下舵机系统的俯仰和偏航输入信号分别为δez_in、δey_in,输出信号分别为δez_out、δey_out。为了方便弹体姿态运动分析和控制器设计,将舵机系统控制模型由弹体坐标系转换到准弹体坐标系下,其关系式为:

式中,L(t)为准弹体坐标系到弹体坐标系的转换矩阵,即

准弹体坐标系下舵机传递函数矩阵为:

综上,得到火箭弹姿态运动开环传递函数

2 耦合分析与解耦设计
2.1 俯仰和偏航通道耦合特性分析
为了分析旋转火箭弹俯仰和偏航两通道的耦合作用,不妨选取舵偏角δey_in=0°、δez_in为脉冲信号,幅值为5°,周期为4.5 s,占空比为10%,得到俯仰和偏航通道的响应曲线如图2所示。

图2 俯仰通道脉冲输入时俯仰和偏航通道响应
由图2可知,在只有俯仰脉冲信号输入的情况下,除了俯仰通道响应外,偏航通道也存在明显的响应。同理,可验证偏航通道输入对俯仰通道的影响。这表明两通道间存在显著的耦合作用。
2.2 解耦补偿器设计
由于不是所有的运动状态量均能够测得,而系统的输出(即姿态角)是可以准确测得的,故采用反馈解耦法设计动力学解耦补偿器。对于控制耦合,由于舵偏角可测,可直接利用单位阵解耦法设计控制解耦补偿器。这里以前者为例介绍解耦补偿器设计过程。图3给出了利用反馈解耦法实现动力学解耦原理图。
图中R1(s)、R2(s)为参考输入,Y1(s)、Y2(s)为系统输出,Gc1(s)、Gc2(s)为控制器,DF12(s)、DF21(s)为反馈解耦补偿器,GP11(s)、GP12(s)、GP21(s)和GP22(s)为被控对象。
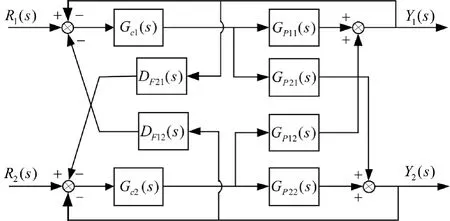
图3 反馈解耦法原理
为消除两通道间动力学耦合作用,解耦补偿器DF(s)设计过程如下。根据图3所示,有

求解上述方程得到反馈解耦补偿器为

注意,解耦补偿器的表达式中包含控制器,其具体形式见下文3.1节。根据单位阵解耦法原理,容易获得控制解耦补偿器DC如下:

3 控制系统设计
基于线性化的姿态运动方程,根据控制性能指标要求,分别利用PID控制方法和模型参考自适应控制方法设计控制器。
3.1 PID控制器
基于PID控制方法得到的控制律形式为:

式中,u1为利用PID控制方法得到的控制量,e为误差信号,kp、ki和kd分别为比例、积分和微分增益。通过根轨迹方法,可确定kp=80,ki=80,kd=9。
至此,利用式(21)可得到动力学解耦补偿器DF,经降阶可得:

采用2.1节中相同的输入信号,在解耦补偿器作用下,偏航通道输出响应如下页图4所示。
由图4可知,解耦补偿器很好地实现了俯仰和偏航通道的解耦。为了验证PID控制器的控制效果,这里以偏航通道为例,给定参考输入为5°,俯仰通道控制约束为:-20°≤δey≤20°。选取以下3种工况进行验证。工况1:理想飞行工况,即不存在参数摄动和外界扰动;工况2:动力学参数a25,b34和b35减小30%;工况3:t=3 s时偏航通道受到5 N·m的外界力矩干扰,用来模拟火箭弹遭遇阵风的情况。图5给出了在上述3种工况下偏航通道的响应曲线。

图4 俯仰通道脉冲输入时偏航通道响应
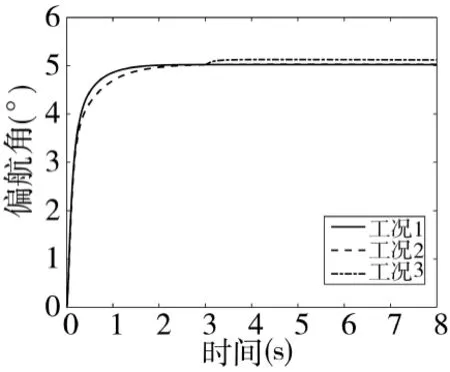
图5 PID控制律下偏航角变化曲线
由图5可知,3种工况下系统均能实现稳定。对于工况2,偏航角达到稳态值的时间变长;对于工况3,系统在恒值干扰力矩作用下出现明显的偏差。
3.2 自适应控制器
为了更好地克服模型参数摄动和外界扰动对姿态回路带来的影响,在完成系统解耦后,采用模型参考自适应控制方法分别对俯仰通道和偏航通道进行控制器设计。图6为模型参考自适应控制系统框图。

图6 模型参考自适应控制系统
这里仍以偏航通道为例,选取参考模型Gm为去除耦合项后的单通道模型:

被控对象的数学模型为:

选择控制律形式如下:

其中,u2为控制量,k为前馈增益;r为参考输入;f0和f1为反馈增益;yp为被控对象输出。
可调系统的动态方程为:

误差方程为:

其 中 ,er=ym-yp,δ1=ap1-am1,δ0=ap0-am0,σ1=bm1-bp1,σ0=bm0-bp0。
设参数误差向量和广义误差向量为:

把式(29)写成矩阵-向量形式:

构造Lyapunov函数为

式中,P为2阶对称正定矩阵,Γ为4阶对角线正定矩阵,即:

取V对时间的一阶导数,则有
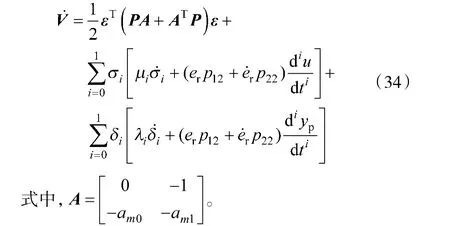
选取正定矩阵Q满足PA+ATP=-Q,可得增益系数k、f0和f1的自适应调整规律为:
通过式(35)所描述的自适应规律调节k、f0、f1和正定对称矩阵Q,可知V˙满足负定,同时可实现模型参考自适应控制。
同样,偏航通道输入幅值为阶跃信号,基于3.1节中的3种工况,偏航通道的响应曲线如下页图7所示。为了比较,将PID控制系统的输出也显示在图7中。
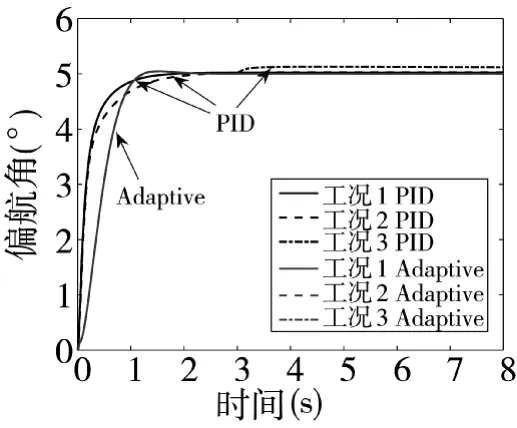
图7 两种控制律作用下偏航角变化曲线
由图7可知,在自适应控制律下,3种工况下得到的响应曲线几乎重合,这说明在自适应控制律下,参数摄动和外界干扰对系统的输出几乎没有造成影响,即系统对于参数摄动和外界干扰具有较强的鲁棒性。
为了对比两种控制律作用下舵偏角的变化情况,工况1对应的等效舵偏角变化如图8所示。可见,PID控制需要的舵偏角更大,初始瞬间已达到了正向饱和值,而自适应控制下的舵偏角初始值只有10°,且变化较为平缓。
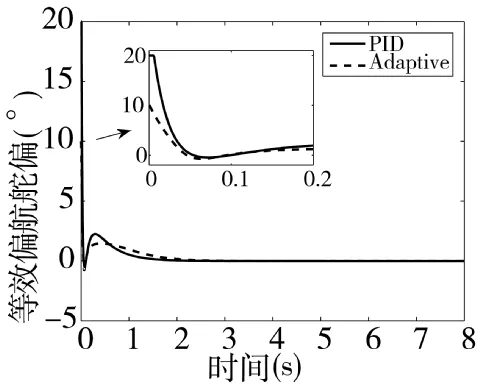
图8 偏航通道等效舵偏角变化曲线
4 结论
为了设计旋转火箭弹姿态控制系统,分别采用反馈解耦法和单位阵解耦法对旋转火箭弹动力学和控制进行了解耦,并针对俯仰和偏航通道分别设计了PID控制器和模型参考自适应控制器。研究表明,在理想飞行工况下,两种控制器均能很好地实现飞行控制,但当系统中存在较为明显的参数摄动和外界扰动时,自适应控制器表现出更为优越的控制效果。
[1]袁天保,刘新建,秦子增.自旋弹道导弹动力学与控制[J].宇航学报,2005,27(2):217-221.
[2]陈罗婧,刘莉,于剑桥.双通道控制旋转导弹自动驾驶仪回路的数学变换及其耦合性分析[J].北京理工大学学报,2007,27(10):847-850.
[3]高庆丰,夏群力,方蜀州,等.一种单通道旋转导弹自动驾驶仪设计方法[J].北京理工大学学报,2011,31(6): 670-674.
[4]陈法扬,康凤举,赵晓冬,等.火箭助飞鱼雷程序弹道自适应控制系统设计[J].火力与指挥控制,2010,35(10): 78-80.
[5]丁玮,洪黎,宋彬.基于AHP法对单兵火箭弹弹丸炸点精度影响因素的分析改进[J].兵器装备工程学报,2016 (5):29-35.
[6]史鲲,张效义,陈勇,等.空面导弹模型参考自适应控制设计与仿真[J].飞行力学,2010,28(3):51-54.
[7]钱杏芳,林瑞雄,赵亚男.导弹飞行力学[M].北京:北京理工大学出版社,2013:248-255.
Design of Adaptive Control System for Spinning Rockets Based on Feedback Decoupling Method
RUAN Zheng-wei,ZHOU Wen-ya,ZHANG Da-li,QIN Li-bo
(School of Aeronautics and Astronautics,Dalian University of Technology,Dalian 116024,China)
The spinning of rockets will cause strong coupling between pitch and yaw channel and the kinetic parameters of rockets are changing significantly during flight,which will make it more difficult to design the control system for spinning rockets.For the coupling of two channels,the feedback method is applied to achieve dynamic decoupling and the model reference adaptive control (MARC)method is used to design the controller for every single channel.The results show that the above methods can reduce the impact of coupling on control system and improve robustness of control system against the changes of kinetic parameters and external disturbance as well as satisfy the requirements of flight control system for spinning rockets.
spinning rockets,feedback decoupling,adaptive control,robustness
TJ<765.2 class="emphasis_bold">765.2 文献标识码:A765.2
A
1002-0640(2017)03-0161-05
2016-02-14
2016-03-18
航空科学基金资助项目(20130163002)
阮政委(1991- ),男,河南南阳人,硕士研究生。研究方向:飞行器动力学与控制。
猜你喜欢
科学技术创新(2022年31期)2022-10-27
舰船科学技术(2022年11期)2022-07-15
导弹与航天运载技术(2022年2期)2022-05-09
廊坊师范学院学报(自然科学版)(2021年2期)2021-09-10
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
玻璃(2019年3期)2019-04-01
汽车文摘(2018年4期)2018-11-27
物理教学探讨(2018年1期)2018-02-13
汽车文摘(2014年10期)2014-12-13
