基于51单片机小球控制系统的设计与实现
2017-04-25 13:27曾维鹏蔡莉莎韩宝如
电子设计工程 2017年8期
曾维鹏,蔡莉莎,韩宝如
(1.海南软件职业技术学院 海南琼海571400;2.海南大学 海南 海口570102)
基于51单片机小球控制系统的设计与实现
曾维鹏1,蔡莉莎1,韩宝如2
(1.海南软件职业技术学院 海南琼海571400;2.海南大学 海南 海口570102)
针对全国电子设计竞赛(J)题通过控制摆杆的高低来实现小球滚动,并根据摆杆与水平平面的夹角和小球在槽内的位置来控制小球在光滑的U型槽内完成各种要求的往复运动的要求。本设计以STC89C52单片机为主控核心,结合角度传感器、光电对管、直流减速电机、LED、蜂鸣器及LCM1602液晶屏构成一套完整的小球滚动控制系统。通过LCM1602液晶屏显示往复运动、位置、周期、偏差4组数据的时间及角度,通过16个LED实时显示小球的运行轨迹,通过实验表明该系统符合设计要求。
单片机;小球滚动控制系统;往复运动
本系统是2015年全国电子设计竞赛的J题,题目要求设计一个U型导轨,导轨一端固定在U型导轨上,另一端固定在顶梁上通过电机控制其上下运动,使小球在导轨上按要求去灵活滚动或定位。小球的运动要求如下:当小球触碰到导轨两端的触发装置时,有明显的声光报警;15 s内自动将导轨从正负15度范围内的任一位置调整至水平状态,小球放置在导轨25~35 cm区间某一位置时静止不滚动;小球在原点从静止开始,15 s内使小球在导轨上做3次往复运动,且运动控制在5~55 cm区间范围内;在往复运动状态下,通过设置命令(按键)使小球在15 s内稳定停止在28~32 cm位置区域内,并至少保持10 s;小球在原点从静止开始,在30 s内完成不少于3次往复运动,往复运动周期在3~8 s间可设置;小球在原点从静止开始,在30 s内控制小球在导轨上以30 cm处为中心,做不少于4次往复运动;往复运动偏离中心的最大位移可在15~25 cm区间设置,且最大位移偏差不超过2 cm[1]。在完成上述基本功能后,本系统还将小球的实时角度位置显示在液晶显示屏上。
1 系统方案论证与比较
1.1 系统结构
小球滚动控制系统由STC89C52单片机、电机和驱动模块、传感器、液晶显示屏等部分构成。由电机来控制绕线从而来使摆杆上下摆动,在摆杆上安装角度传感器和红外传感器用于检测小球在U型槽中所处的位置,初步设计的系统功能框图见图1。
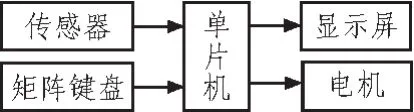
图1 系统框图原型
1.2 方案比较与选择
1)电机方案比较与选择
方案一:选择步进电机:步进电机精度高,速度可调,但慢速调节时电机震动剧烈,时刻影响摆杆上的滚珠平稳活动[2]。方案二:选择普通有刷电机,速度可调,精度不高,速度调节时因电机速度较快,使摆杆摆动的角度较大从而使小球速度过快不好控制[3]。方案三:选择直流减速电机,速度可调,速度较慢,精度适中,稳定性好,能够很好的控制摆杆的角度。综上所述,考虑到本题对小球滚动的往复运动最大距离为50±2 cm,使用步进电机由于存在抖动问题,普通直流电机速度过快难以控制,所以我们选择方案三:直流减速电机[4]。
2)小球位置检测方案比较与选择
方案一:选择超声波传感器,超声波测试距离精准度高,灵敏度高,但检测物的方向不断的改变,且小球的形状为球体,检测难度较大,而且超声波传感器的体积相对较大,不好安装到摆杆上[5]。方案二:选择光电传感器,在U型导轨上的关键位置安装光电传感器,当小球经过改点时反馈信号给主控芯片,该感器灵敏度较高,体积小可随意摆放比较灵活[6]。综上所述,使用光电传感器检测小球的位置可靠,且程序设计较简单,故我们选择方案二来检测小球在U型导轨内的位置。
3)摆杆平衡检测方案比较与选择
方案一:选择角度传感器,精度灵敏度高,稳定性好,能够很好的检测角度,但若装置没有水平放置时角度传感器会有一定的误差[7]。方案二:选择红外传感器,红外传感器精度适中,灵敏度适中,体积适中,能够检测较长的距离,并且所需的控制的例程简单[8]。方案三:角度传感器加红外传感器,这种方案将上诉两种传感器结合起来使用,检测精度高,适应不同的工作环境,能够提高控制系统的可靠性[9]。综上所述,摆杆平衡检测选择选用方案三角度传感器加红外传感器作为摆杆平衡检测模块。
4)供电方案比较与选择选择
方案一:单电源供电,方便占用空间小,连接方便,但是当电机和单片机一起启用时会影响单片机正常运行,和传感器模块与单片机在电路回路中存在干扰,所以该方案不可行。方案二:双电源供电,可以解决单电源供电存在的缺点,可以任意调节电机电压,所以采用该方案。
经过上述论证,我们决定本项目采以STC89C52单片机为主控核心,结合角度传感器、光电对管、直流减速电机、LED、蜂鸣器及LCM1602液晶屏构成一套完整的小球滚动控制系统,系统框图见图2。
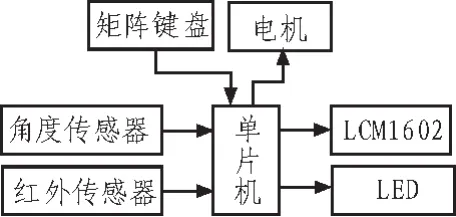
图2 本设计的系统框图
2 小球滚动控制系统设计与检测
2.1 结构系统设计与检测
系统实物图如图3所示,将红外传感器分别安装到摆杆不同标度上,用来记录小球的位置,利用光电传感器加角度传感器判断摆杆的摆动的角度,红外传感器分别装在摆杆的上方和侧方,使摆杆随时能够调节角度。系统通过红外和光电传感器检测小球的位置,然后将数据送到单片机处理,单片机通过控制电机驱动模块L298N控制电机来回转动[10],从而使小球任意滚动,根据不同任务,使用PWM方法控制电机的转速[11],使之符合任务要求。
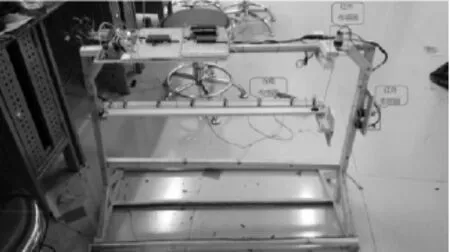
图3 实物图
2.2 小球检测设计与检测
将8个光电传感器与单片机P1口相连,利用光电传感器对小球位置进行检测,将光电传感器放置在摆杆的不同标度,当没有小球经过时,传感器输出低电平,当小球从原点出发经过光电传感器时,传感器输出高电平,将数据送入单片机处理[12]。
2.3 摆杆平衡检测设计与检测
将3个红外传感器与单片机P2口相连,利用红外传感器检测摆杆是否调整到水平状态,然后将上方红外传感器调整到刚好检测到水平位置,接着调整侧边的红外传感器刚好检测到水平位置,双向检测摆杆使摆杆能更精确检测水平位置[13]。
2.4 摆杆摆动角度设计与检测
利用电机驱动模块L298N控制模块驱动减速电机[14]。将红外和光电传感器检测到的数据传送到单片机进行处理,单片机再经过PWM算法改变输出频率,再将数据送给电机驱动模块控制电机旋转,通过绕线最终控制摆杆[15]。
3 电路与程序设计
3.1 电路设计
红外传感器和光电传感器和单片机连接将检测到的信号送到单片机,单片机再进行信号处理,将处理后的数据送至与单片机连接电机驱动模块[16],从而控制电机正反转,再通过连接在单片机的矩阵键盘切换不同任务,从而达到控制小球运动的不同的效果。显示电路是单片机与LCD1602显示模块组成,将小球所用的时间和摆杆的角度记录显示。
3.2 程序结构设计
根据任务要求,需要设置多个不同的功能,所以采用矩阵键盘作为输入。在程序设计方面,通过键盘扫描,判断按键,再根据按键设置电机的工作方式[17],以实现不同的任务,程序流程图见图4。
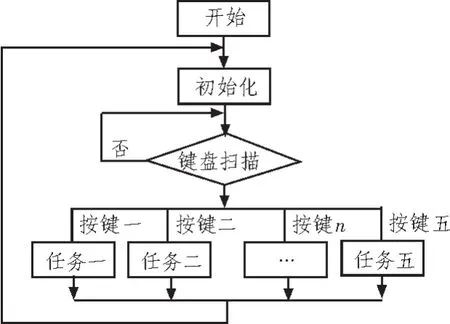
图4 流程图
4 系统测试方法及数据
测试前,将门型框架摆正,保证整个框架在水平位置,启动电源,便可进行测试[18],测试时,根据任务要求,按下相应的按键便能完成对应的任务,任务进行时,液晶屏实时显示任务时间和摆杆角度,16个LED实时显示小球在U型导轨内的位置信息。系统测试数据如表1~表4。
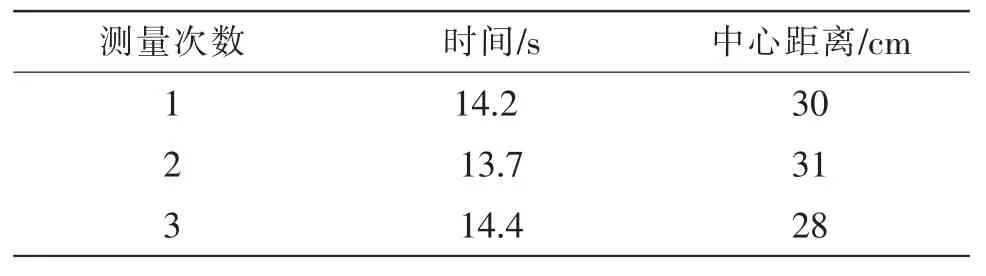
表1 测试数据1

表2 测试数据2
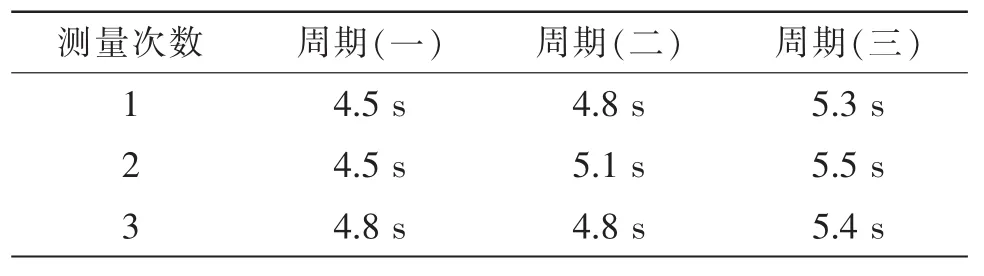
表3 测试数据3
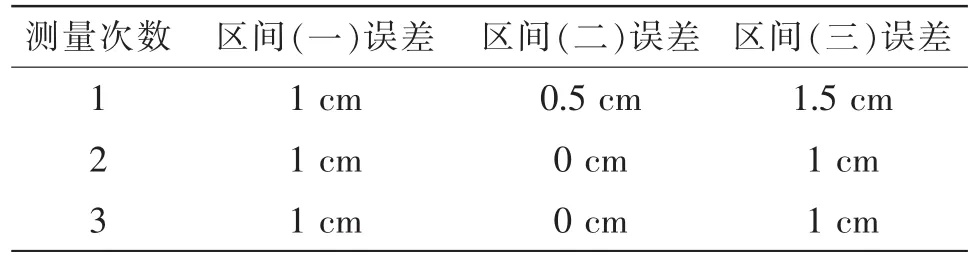
表4 测试数据3
根据以上数据表明,所设计的小球控制系统符合设计要求,而且整个系统较为稳定,误差范围较小。
5 发挥与创新
本系统在完成赛题基本运动要求的基础上进行了以下3点创新:采用LCM1602液晶屏模块进行实时时间显示;采用 LCM1602液晶屏模块加ADXL345角度传感器模块进行实时角度显示;采用16个LED加红外光电对管传感器实时显示小球在导轨上的轨迹。
6 结 论
本系统以单片机为控制核心,根据各种传感器采集的信息,控制直流减速电机正反转来控制导轨上下运动,从而达到控制小球在U型导轨中往复滚动的目的。在系统设计中,力求硬件线路简单,充分发挥软件编程灵活的特点,来满足系统设计的要求。当然本系统在算法[19]和硬件电路方面仍需要进一步优化。 经过整个竞赛团队的努力,本系统的设计在比赛中也取得了全国一等奖的优异成绩。经过竞赛也使学生的动手能力得到进一步的提高。
[1]全国电子设计竞赛组委会.小球滚动控制系统(J题)[EB/OL].http://www.nuedc.com.cn/index.asp.
[2]王玉琳,王强.步进电机的速度调节方法[J].电机与控制应用,2006,33(1):53-56.
[3]李洁.基于有刷电机的电动助力转向系统结构参数优化[D].沈阳:沈阳理工大学,2014.
[4]李雪东,张平华,邓知辉.基于直流电机控制与驱动模块的研究与应用 [J].中国集成电路,2008(12):75-77.
[5]栗桂凤,周东辉,王光昕.基于超声波传感器的机器人环境探测系统[J].传感器与微系统,2005,24(4):59-61.
[6]胡媛媛,邓世建,王书婧.基于红外光电传感器的智能寻迹小车设计[J].电子设计工程,2011(7):141-143.
[7]王艳永,邓方,孙健.改进的自适应神经模糊推理系统的角度传感器误差补偿方法[J].控制理论与应用,2013(10):1342-1347.
[8]吴建平,殷战国,曹思榕,等.红外反射式传感器在自主式寻迹小车导航中的应用 [J].中国测试技术,2004(6):21-23.
[9]王博,郝文昌,王志超,等.自由摆平板控制系统的分析与设计[J].电子技术,2012(8):43-47.
[10]张洁,刘萍,卢慧.基于单片机AT89C52的多功能探测小车设计[J].电子测量技术,2014,37(8):85-88.
[11]李维军,韩小刚,李晋.基于单片机用软件实现直流电机PWM调速系统[J].机电一体化,2004(5):49-51.
[12]靳展,刘铮,林玉池.光电传感器特性参数测试系统的设计[J].传感技术学报,2012(12):1678-1681.
[13]张晔,杨卫,岳元,等.基于热释电红外传感器探测距离影响因素的研究 [J].红外与毫米波学报,2010(6):448-451.
[14]周游,景艳梅,何文学.智能寻迹系统设计[J].仪表技术,2012(3):25-27.
[15]云中华,刘洪春,李勇峰,等.STM32的方位角度与倾斜数据测量仪系统设计[J].单片机与嵌入式系统应用,2015(10):35-36.
[16]锁军,刘翠翠,李树芃,等.新型三相倍压整流电路的研究与实现[J].西安工程大学学报,2016,30(6):783-790.
[17]王亮,王文策,程斌,等.基于Simulink的发电机励磁系统整流单元的建模与仿真 [J].陕西电力,2011(7):25-28.
[18]于 康,孙亚非,陈晓江.X射线衍射残余应力测试方法及应用[J].火箭推进,2015(2):102.
[19]薛诚尤,聂万胜,何博.基于基元反应的总包机理建模及算法优化[J].火箭推进,2015(1):36.
Design and implementation of ball control system base on 51 small single-chip
ZENG Wei-peng1,CAI Li-sha1,HAN Bao-ru2
(1.Hainan Software Profession Institute,Qionghai 571400,China;2.Hainan University,Haikou 570102,China)
The system by controlling the pendulum level to achieve a small ball rolling,and according to the angle between the horizontal plane of the pendulum and the ball in the slot position to control the ball in a smooth U-groove to complete the various requirements of reciprocation requirements.This design takes STC89C52 microcontroller as the core,combined with angle sensor,photoelectric to tube,DC motor,LED,buzzer and LCM1602 liquid crystal screen.By LCM1602LCD display time and angle of four sets of data,comprising a shuttle,the location,period,error,a total of four sets of data.By 16 LED display real-time trajectory of the ball.Experiments show that the system meets the design requirements.
micro-control-unit;controlsystem of ball rolling;reciprocating motion
TN4
:A
:1674-6236(2017)08-0068-04
2016-03-24稿件编号:201603325
2015年海南省教育科学规划课题(QJY1251558)
曾维鹏(1982—),男,海南澄迈人,硕士,副教授。研究方向:智能诊断、智能规划等。
猜你喜欢
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26
工程技术研究(2021年1期)2021-03-20
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
动漫界·幼教365(中班)(2020年8期)2020-06-29
家教世界·创新阅读(2020年4期)2020-06-03
家教世界(2020年10期)2020-06-01
塑料包装(2019年6期)2020-01-15
中国特种设备安全(2019年7期)2019-09-10
设备管理与维修(2019年14期)2019-06-16
现代机械(2018年5期)2018-11-13