
某型涵道无人飞行器控制系统设计
2017-04-25 06:04付江玲曹东吕迅竑
单片机与嵌入式系统应用 2017年4期
付江玲,曹东,吕迅竑
(南京航空航天大学 自动化学院,南京211106)
某型涵道无人飞行器控制系统设计
付江玲,曹东,吕迅竑
(南京航空航天大学 自动化学院,南京211106)
涵道无人飞行器是一种可垂直起降的新型航空器,控制系统是其核心组成部分。从工程应用需求出发,针对涵道飞行器设计了一种具有高性能价格比、结构紧凑、低功耗的控制系统;提出基于PID的飞行控制策略并给出了控制系统总体结构,设计硬件与软件系统实现飞行器的姿态和轨迹控制,并进行飞行仿真试验验证。验证结果表明,设计方案合理可行,具有很高的应用价值。
控制系统;涵道无人飞行器; MPC5644A;PID控制
引 言
纵观国内外涵道无人飞行器的研究现状,其发展仍处于起步上升的阶段,与之相应的控制系统都不成熟,也正因为如此,对其进行系统的研究具有重大意义。本文针对单旋翼涵道无人飞行器,基于某工程项目的实际需求,设计了一款飞行控制系统,并进行了飞行仿真实验,实现了人工飞行、指令飞行和自主飞行,为下一步试飞试验奠定了坚实基础。
1 某型涵道无人飞行器介绍
涵道无人飞行器主要由上下载荷舱、涵道机身、动力推进系统、控制舵面、起落架组成。本文采用UG软件对涵道无人飞行器进行三维立体建模,经虚拟装配后的总体结构如图1所示。
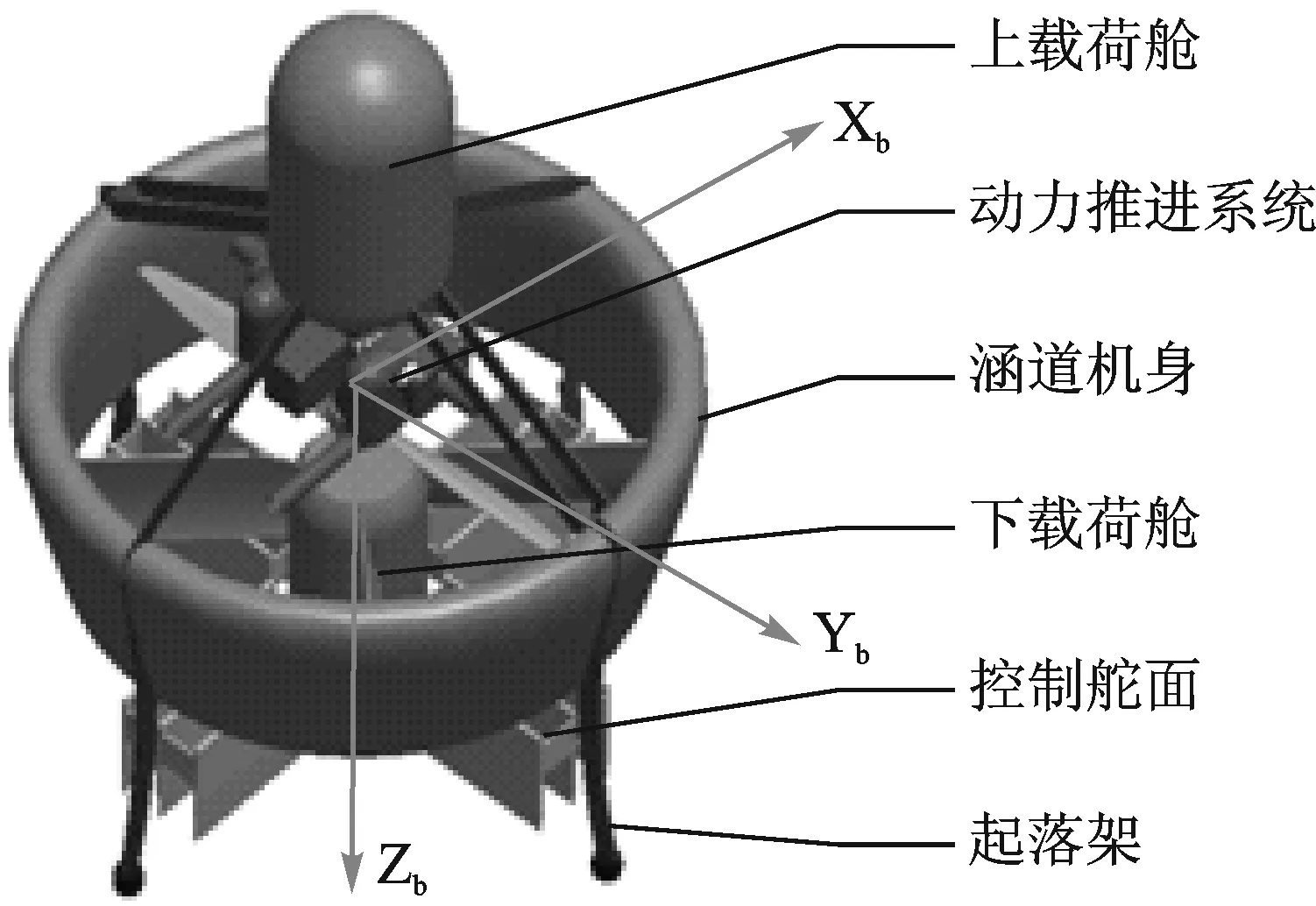
图1 涵道无人飞行器总体结构示意图
该飞行器最大特点是将螺旋桨包裹在涵道机身内,由涵道和螺旋桨共同构成它的升力系统。飞行器在垂直起降或悬停时,通过发动机带动螺旋桨旋转,为飞行器提供主要升力;在前飞或高速飞行时,涵道可看作一种环形机翼,与固定翼类似,为飞行器提供气动升力,涵道螺旋桨则提供主要的前进力。
涵道无人飞行器载体坐标系OXaYaZa,原点位于飞行器的质心,指向飞行器的前方为X轴正方向,指向飞行器的右方为Y轴正方向,垂直于X轴并指向地面为Z轴正方向。
涵道底部四个控制舵面在飞行器中的布局如图2所示,四个舵面协调配合实现飞行器的姿态控制。俯仰控制是通过控制舵面2、4的同向偏转来实现,当舵面2、4同时向载体轴Xb正向偏转时,螺旋桨下方的气流向载体轴Xb负方向流动,根据牛顿第三定律飞行器得到向前的推力分量,使其实现前飞运动,同理实现后飞运动。滚转控制是通过舵面1、3的同向偏转来实现的,与俯仰控制同理,只是控制方向变成了载体轴Yb方向,产生的效果是向右或向左运动。航向控制是通过舵面1、3和舵面2、4的差动偏转来实现,当舵面1、3和舵面2、4的偏转方向相反、偏转角度一致时,所产生的反扭力矩相互抵消,飞行器无偏航运动。垂向控制通过调节涵道螺旋桨转速来改变升力与重力比,以实现飞行器上升、下降或悬停。
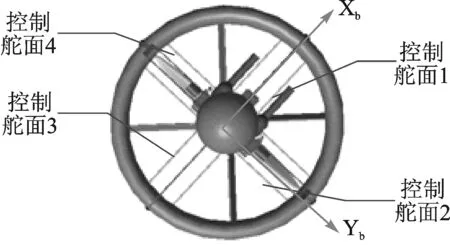
图2 控制舵面分配图
2 控制系统总体设计
2.1 控制策略设计
涵道无人飞行器独特的物理结构决定了可用的控制方法就是控制螺旋桨的转速和四组控制舵面的偏转,实现飞行器内环姿态控制和外环轨迹控制。
涵道无人飞行器具有强操纵耦合性,通常将飞行器的俯仰、滚转和偏航三个通道分为三个独立的控制回路,并通过解耦控制得到各个通道的舵面控制量。
姿态控制原理框图如图3所示,姿态角控制内回路采用双闭环控制,角速率反馈能够改善系统阻尼,提高系统稳定性;外回路姿态角反馈与给定指令信号比较,经PID计算,输出舵机控制量,驱动控制舵面偏转[7]。飞行器在悬停时,惯性传感器测量的航向角与实际值偏差很大,因此采用磁航向计和惯性测量传感器组合的方式进行航向信息的确定和跟踪。

图3 姿态控制原理框图
轨迹控制系统保持对飞行器的质心运动稳定和控制。导航系统输出的信号有飞行器的姿态、航向、坐标位置、应飞航线、侧偏距和待飞距等,轨迹控制系统根据导航信号改变飞行器的运动状态,引导飞行器进入并稳定在预定的航迹线上。根据涵道无人飞行器的运动特点,航迹控制系统可划分为纵/横向位置控制子系统和高度控制子系统。
纵/横向位置控制原理框图如图4所示,纵/横向位置控制子系统以俯仰/滚转姿态控制为内环,速度控制为中间环,加上位置测量传感器构成外回路[8]。飞行器在航迹跟踪过程中受到阵风等扰动因素的影响,位置发生偏移,飞行器偏离预定航迹线,纵/横向位置控制回路的参考坐标由机体坐标系切换至航迹直线段坐标系,采用基于侧偏距和待飞距的位置控制策略。
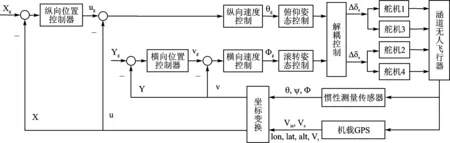
图4 纵/横向位置控制原理框图
高度控制原理框图如图5所示,高度控制子系统采用双闭环的控制策略,以垂向速度反馈控制为内回路,高度反馈构成外回路,采用PI控制,加快给定高度指令的响应速度。当飞行器处于近地面飞行状态时,GPS传感器所测值精度不高,需运用超声波高度计和GPS融合方式来实时获取飞行器高度。
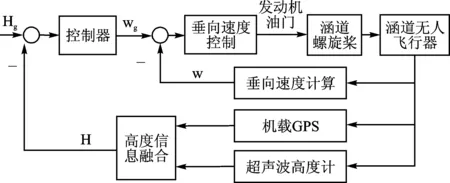
图5 高度控制原理框图
2.2 总体结构设计
涵道无人飞行器控制系统总体结构如图6所示。在物理层面上,控制系统主要分为地面和机载两大部分;在逻辑上,地面控制站和机载控制系统又相互耦合,互为关联。
机载控制系统是涵道无人飞行器系统的控制中心,其内部组成部件根据功能的不同可分为飞行控制计算机、惯性测量传感器、舵机、无线通信模块、自动/手动切换模块和电源模块。地面控制站是飞行器的指挥中心,控制飞行器的垂直起飞、着陆以及空中飞行的整个过程,具有飞行操纵和指令、飞行监控及显示、飞行定位和飞行自动指令等功能。
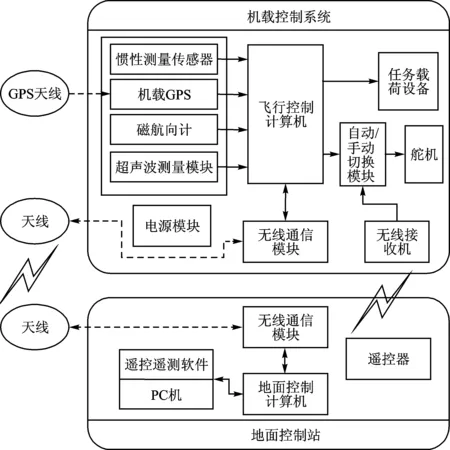
图6 涵道无人飞行器控制系统总体结构
3 硬件设计
飞行控制计算机作为涵道无人飞行器控制系统的核心部件,与控制系统的各个部分相连,最终实现对飞行器的控制与管理功能,其性能的好坏直接影响控制系统的性能和飞行安全。因此,本节重点对涵道无人飞行器飞行控制计算机进行硬件设计。采用模块化设计思想,飞行控制计算机主要由中央处理器模块、传感器模块、外围接口模块、舵机驱动模块和电源模块组成,其硬件结构如图7所示。
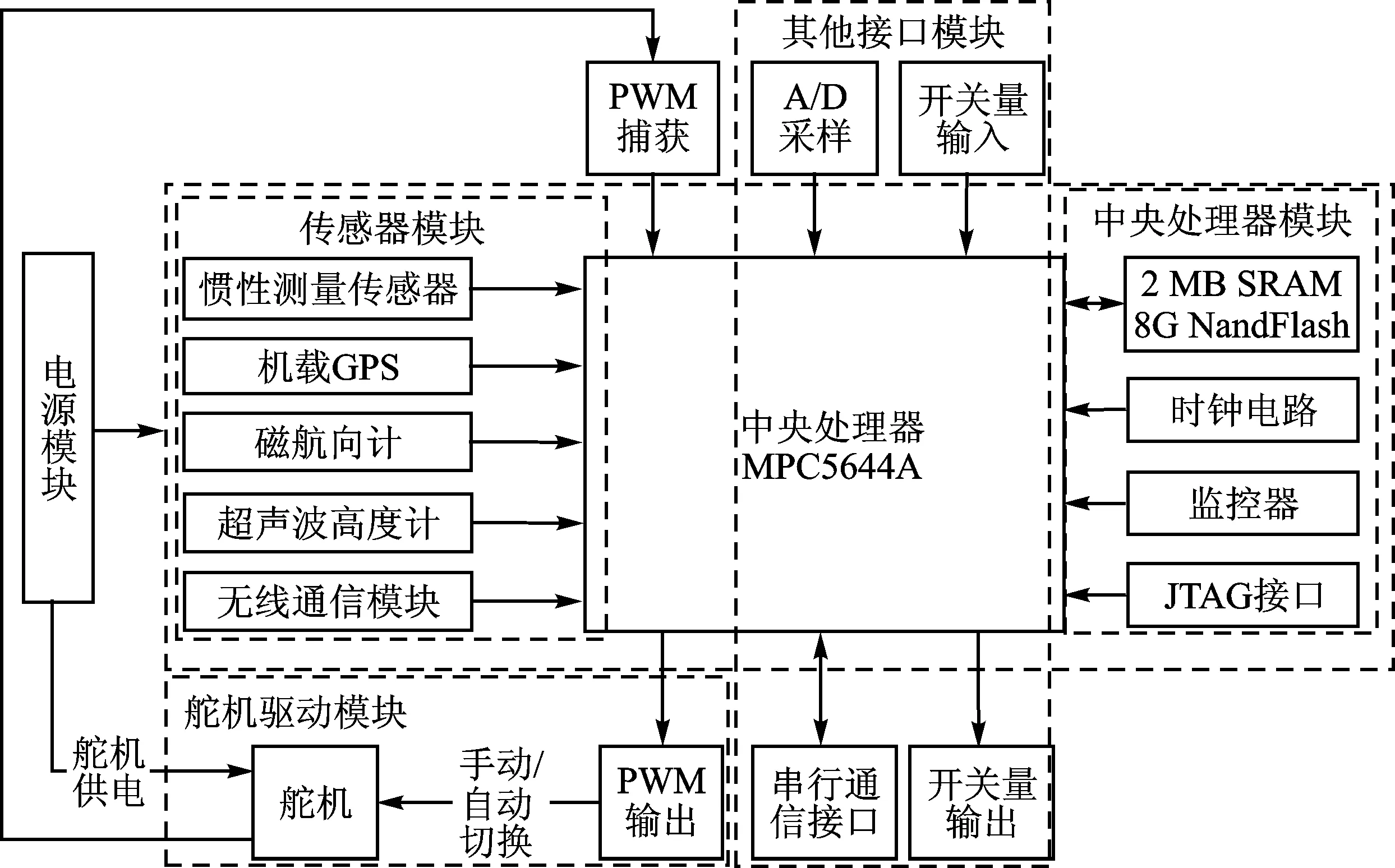
图7 飞行控制计算机硬件结构图
3.1 中央处理器模块设计
中央处理器模块采用MPC5644A[8]为主控芯片,主要由系统时钟、存储单元、系统监控器和调试接口组成。从系统功耗和稳定性方面考虑,结合MPC5644A具有可编程时钟源控制的特性,采用外部有源晶振作为快时钟,内部振荡器模块作为慢时钟,两个时钟之间可以自由切换。CPU内部存储器不能满足控制系统大量数据存取和计算的需求,因此选用2 MB的32位IS61WV51232和8 GB的S34ML08G1作为系统数据和程序扩展存储器,并通过外部总线接口EBI实现与CPU的通信。监控器采用ADI公司的ADM8695芯片实现系统的上电、外部和掉电复位功能、硬件看门狗功能以及瞬间掉电保护功能。中央处理器模块具体电路如图8所示。
3.2 传感器模块设计
由上节可知,控制系统传感器包括惯性测量单元、磁航向计、超声波高度计和无线通信模块,各传感器选型及其接口如表1所列。

表1 涵道无人飞行器控制系统传感器配置
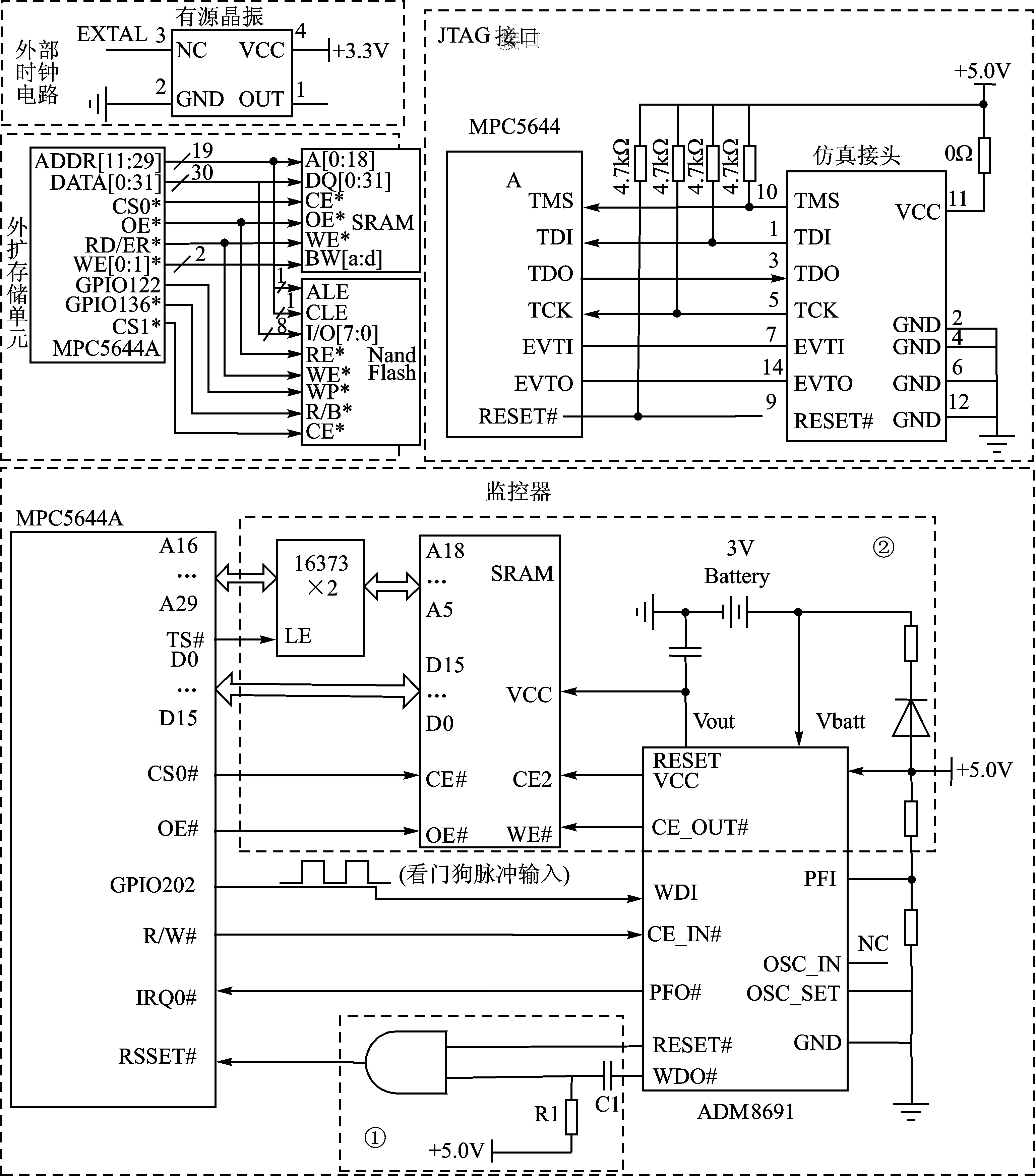
图8 中央处理器模块电路连接示意图
由表1可知,系统传感器接口均为UART接口,考虑能够兼容其他通信设备接口,设计支持RS232/422/485通信协议的串口。MPC5644A 的eSCI和 eTPU模块具有UART功能,支持TTL电平,选用可编程收发器MAX3160,实现支持多协议可转换的串口扩展,具体电路如图9所示。
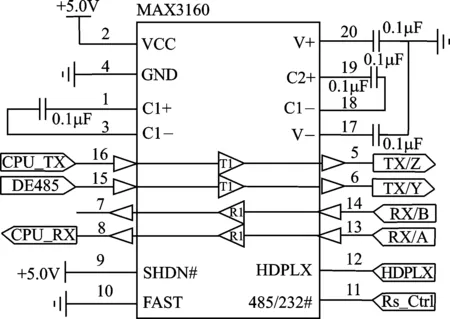
图9 MAX3160串口电平转换电路原理图
3.3 A/D采样接口设计

3.4 开关量接口设计
系统通过开关量接口控制系统开关设备,开关量输入/输出功能可由CPU的GPIO引脚实现。考虑到开关量信号的高传输速率和稳定性要求,DI信号(5/12 V DC或地/开格式)须经光电耦合器隔离、转换后,变为TTL电平信号;DO信号采用光耦继电器实现信号保护与抗干扰功能,并由跳线转换为外部设备能接收识别的5/12 V DC或地/开电平格式。具体电路如图11所示。
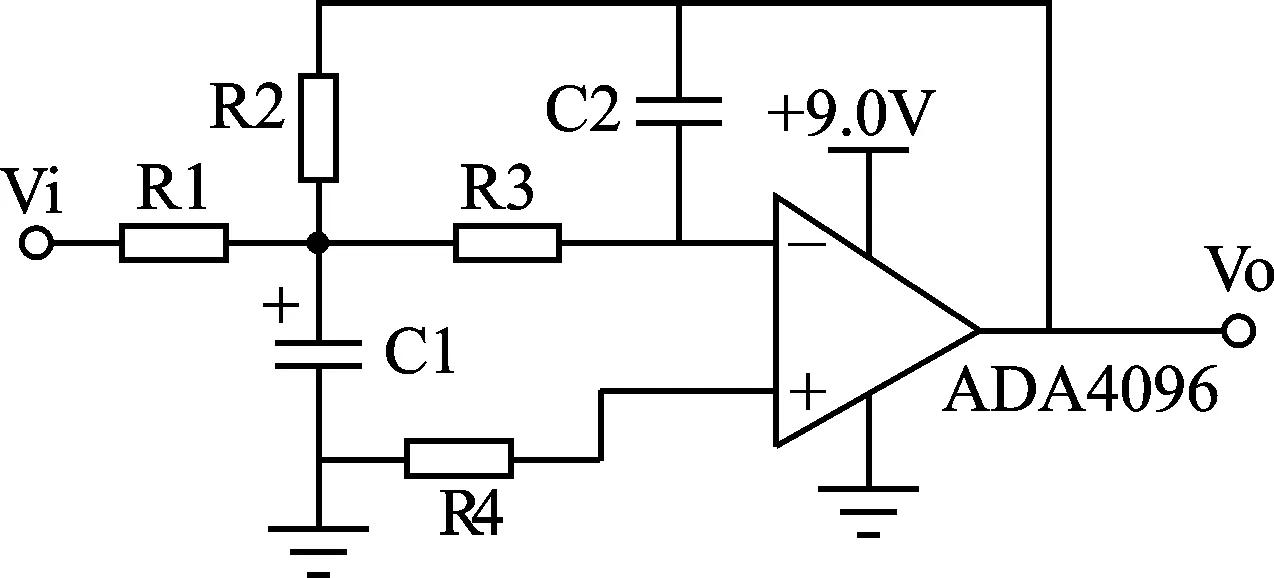
图10 模拟量输入信号调理电路
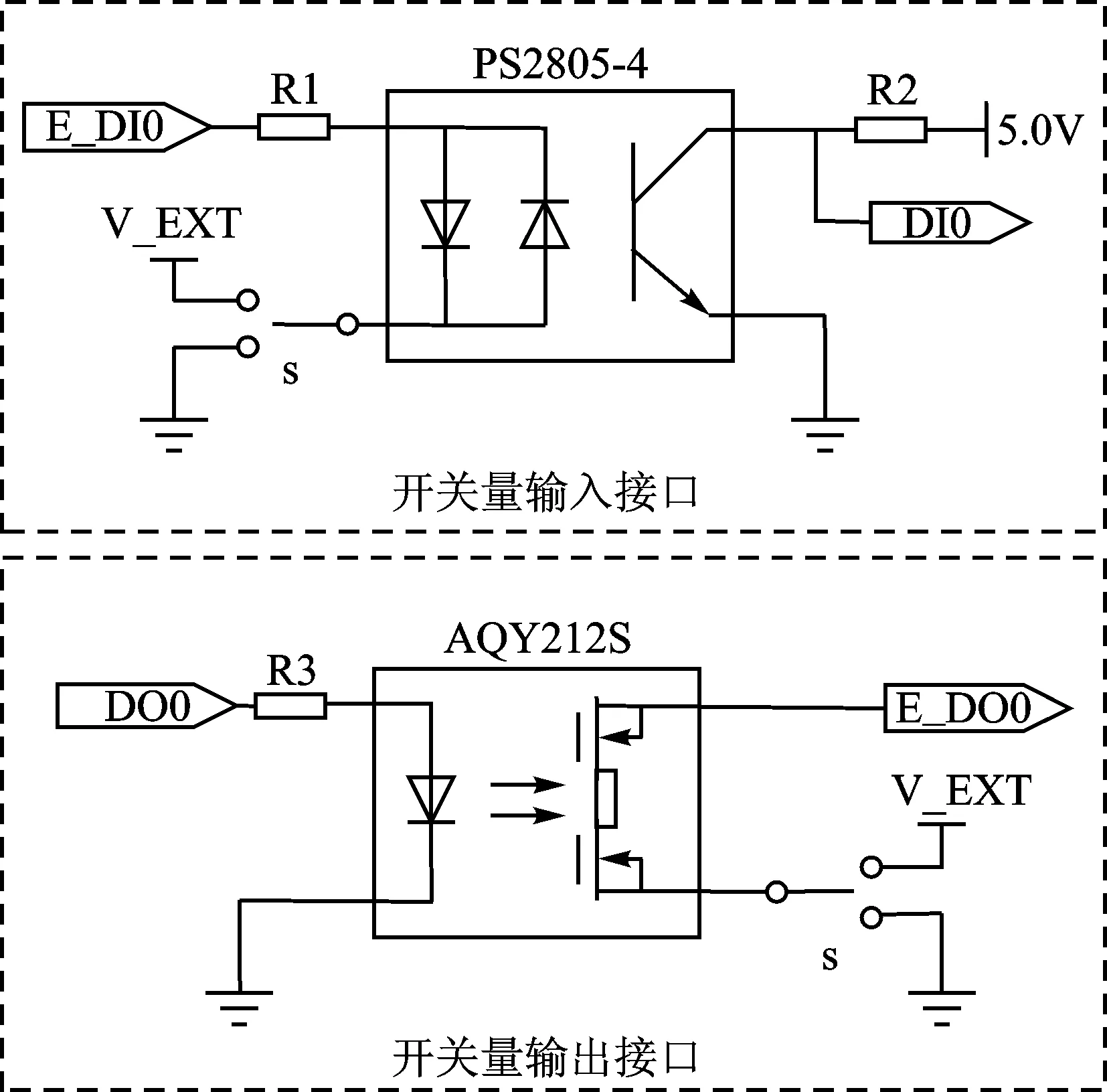
图11 开关量输入/输出接口电路
3.5 舵机驱动模块设计
系统执行机构选用德国VOLZ的DA14系列舵机,其工作电压在4.8~5 V,它是由TTL电平的PWM脉冲信号控制,控制信号的有效脉宽为7~20 ms,有效脉冲长度为0.9~2.1 ms。利用MPC5644A的eMIOS模块实现PWM信号精确地捕获和输出,为提高PWM信号的稳定性和抗干扰能力,采用信号驱动器、光电耦合隔离器和信号整形芯片实现PWM捕获/输出信号的调理。PWM捕获电路与PWM输出电路的设计基本相同,但信号流向是相反的。以PWM捕获接口电路为例,其设计原理图如图12所示。
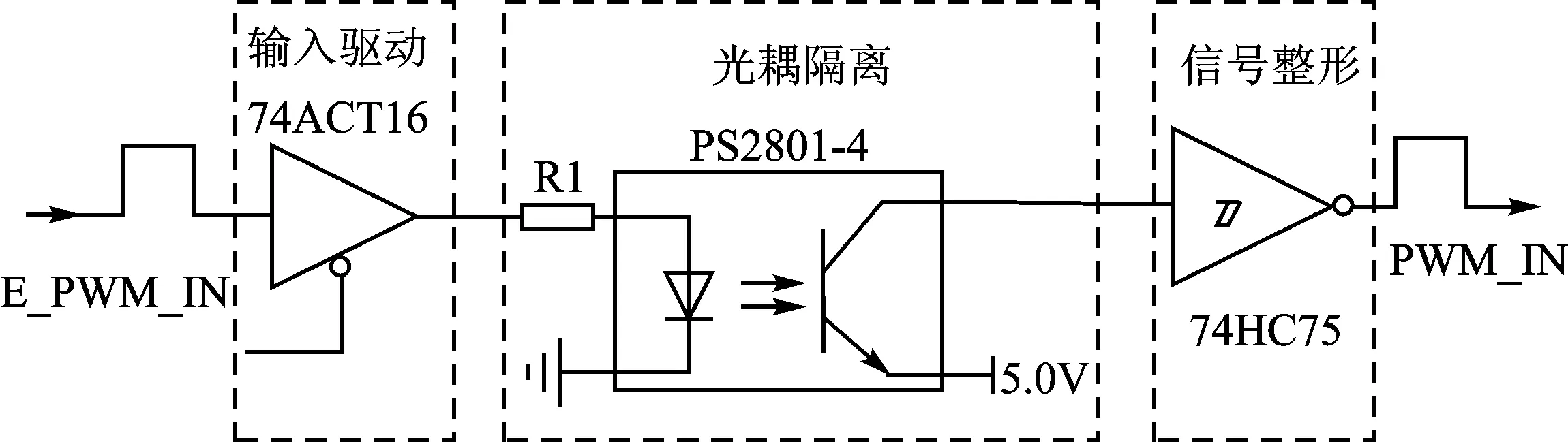
图12 PWM捕获接口电路
3.6 电源模块设计
电源模块是涵道无人飞行器飞行控制系统的能量供给源泉,是构成控制系统必不可少的组成部分。通过对系统各个模块主要器件的供电需求分析,电源模块采用两级变换结构。I级变换是从12 V直流电源降压至9 V和5 V电压,II级变换是将5.0 V降压至所需的3.3 V和 1.2 V电压。具体电压模块分配如图13所示。
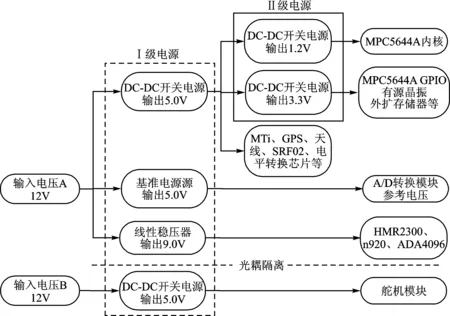
图13 系统电源电压分配图
电流较大、效率要求高的中央处理器和舵机模块,宜选用低压变换式开关电源。每路舵机的工作电流幅值变动较大,易对控制系统其他电路产生干扰,采用单独供电方式,与其他模块的电源地线严格隔开,并通过光电隔离装置进行隔离。对于需要进行小信号处理的滤波电路,可选用纹波小、稳定度高的线性稳压器LDO。因此,I级电源采用开关电源和线性稳压器配合工作的方式,12 V转9 V采用TI公司的TPS70933线性稳压器;12 V转5 V采用ADP2303异步降压DC-DC开关调节器;另外,模拟量输入模块基准参考电压5 V精度要求高,采用REF02CS精密基准电压源。II级电源5.0 V转3.3 V和1.2 V,主要为CPU内核及CPU外围基础模块供电,此级采用DC-DC开关调节器ADP2303。
4 软件设计
为了提高软件设计效率和软件质量,对控制系统软件部分进行层次结构划分。从逻辑层面进行构建分层,将软件结构设计为3个层次,从下到上依次为驱动层、接口层和应用层以及各层之间的衔接协议定义与格式,如图14所示。
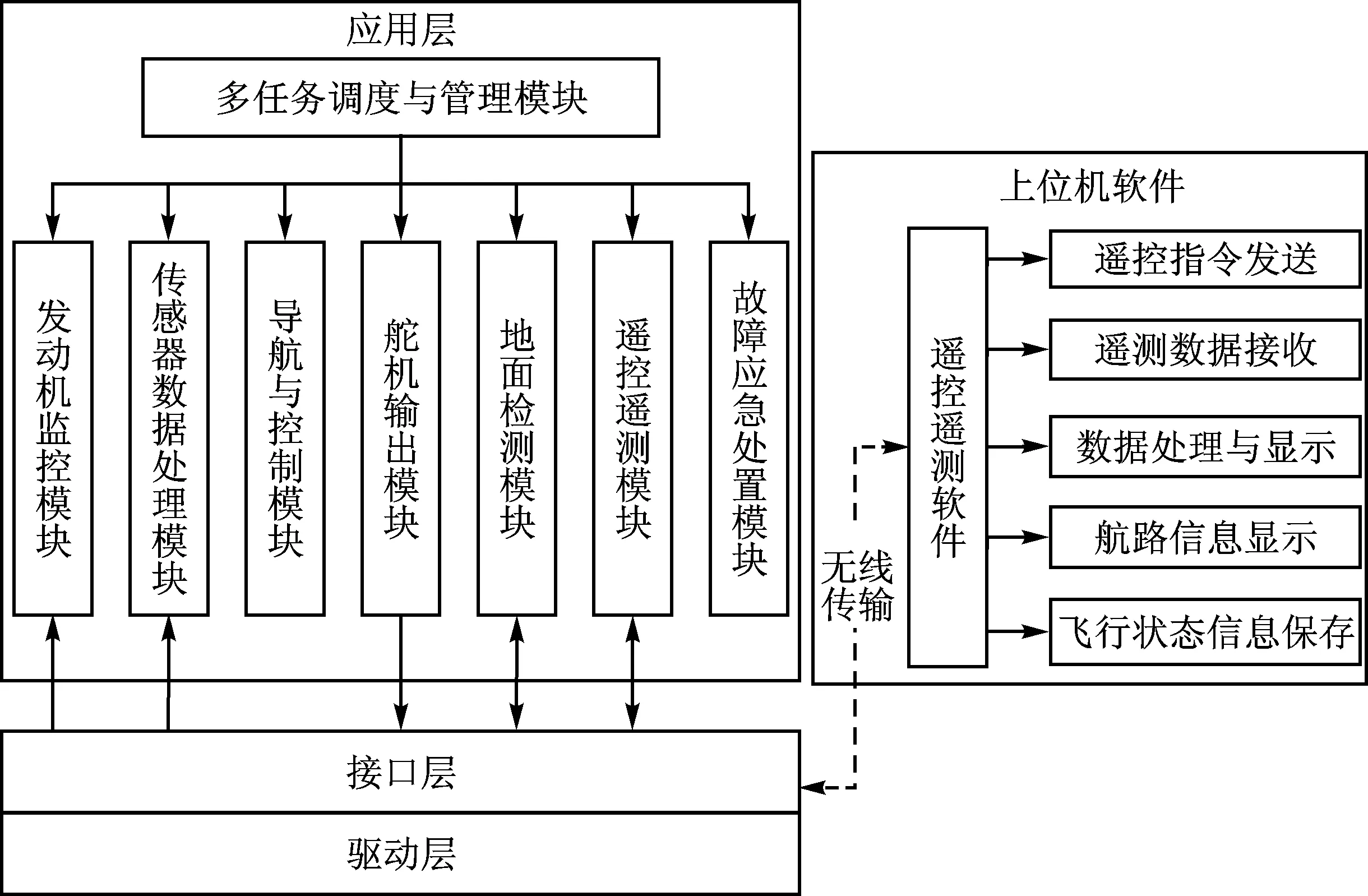
图14 软件层次结构及功能模块
驱动层包括系统初始化、中断服务程序、各接口驱动等程序。接口层联结底层驱动程序和上层应用软件,向下完成各个驱动程序的接口标准化封装和注册,向上提供实现具体应用功能的统一标准接口,避免因硬件平台不同而产生接口差异,增加应用软件的可重用度。应用层是软件的主体部分,该层按功能可划分为以下模块:
① 多任务调度和管理模块:所有功能模块都是由一个或若干个任务组合而成,在软件中设计任务管理内核,用于创建、调度多个任务。任务不分优先级,软件根据控制逻辑来确定任务调度的前后。
② 传感器数据处理模块:对GPS、MTi、磁航向计、超声波高度计的信息进行数据采集和数据融合。
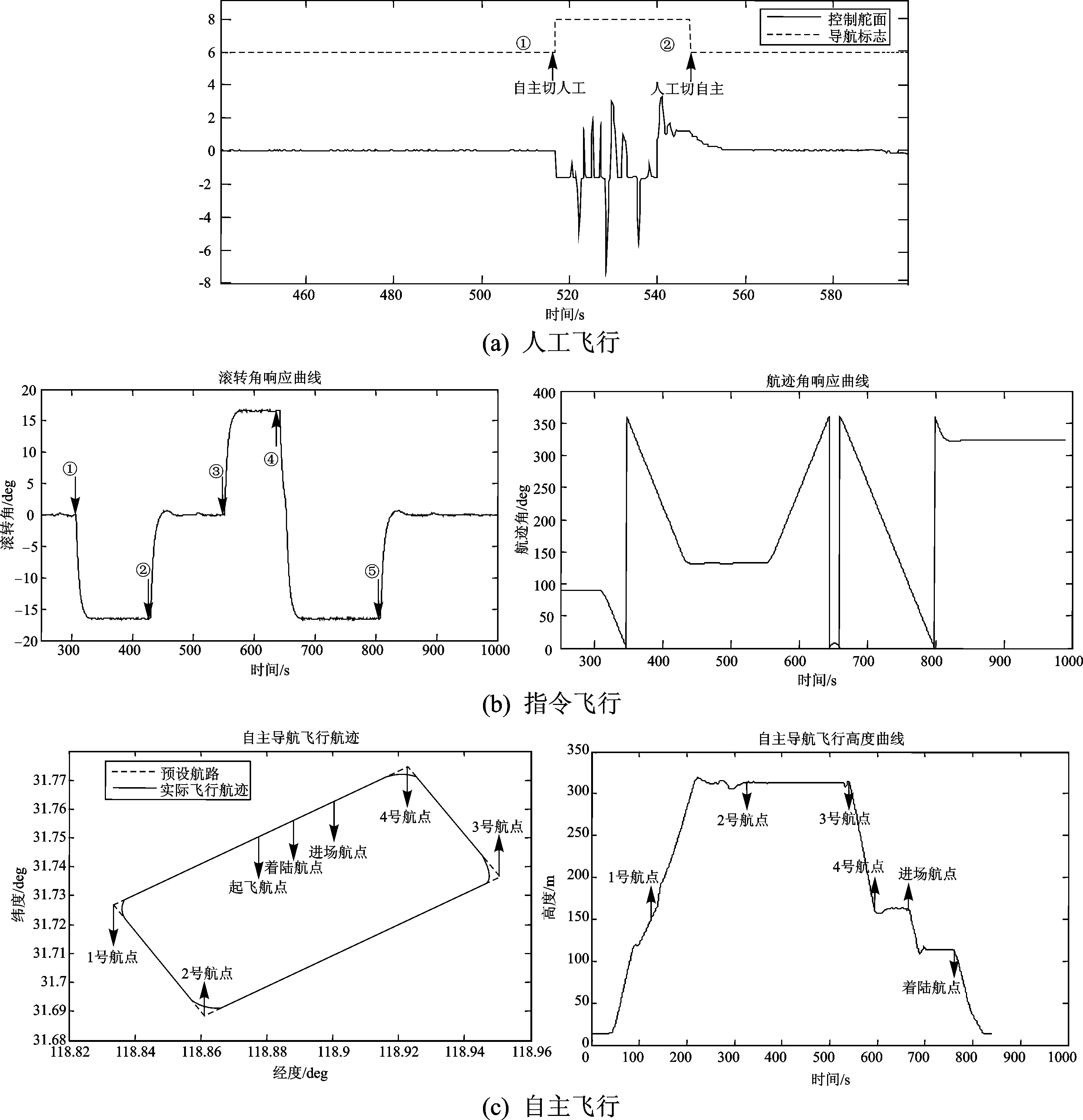
图15 涵道无人飞行器飞行仿真试验效果图
③ 舵机输出模块:系统需要实时解算控制律得出舵机输出值,控制控制舵面以达到飞行器的有效控制。
④ 导航与控制模块:负责无人机不同导航模式下的调度舵机输出模块,并实现姿态控制、速度控制和位置控制。
⑤ 地面检测模块:实现对全系统状态检测与故障诊断功能,此模块只能在无人机处于地面空闲状态时方可进行。
⑥ 遥控遥测模块:系统接收遥控指令,进行相应控制逻辑切换,达到飞行器姿态和轨迹的实时控制。同时,将自身的状态信息通过以遥测数据帧的形式发送给地面站。
⑦ 发动机监控模块:在飞行器全飞行包线中,为满足对飞行高度、速度等控制需求,通过对发动机油门的控制,改变发动机的转速和推力。
⑧ 故障应急处置模块:对全系统所有的设备状态进行实时监测,一旦有异常或故障状态发生,将根据情况进行故障应急处置(主要应急故障包括遥控链路故障、GPS定位故障、高度故障、发动机故障停车)。
上位机软件运行与PC机,通过无线通信链路与机载控制系统完成信息交互,主要功能模块包括遥控指令发送、遥测数据接收、数据处理与显示、航路信息显示和飞行状态信息保存。
5 系统试验
涵道无人飞行器控制系统设计完成后,搭建试验仿真平台,主要进行飞行器分别在人工飞行、指令飞行和按轨迹自主飞行模式的飞行仿真试验,各飞行模式下的飞行曲线效果如图15所示。试验结果证明了控制系统设计的可行性和有效性。
结 语
本文围绕涵道无人飞行器控制系统展开,在研究飞行器物理结构和飞行原理的基础上,提出三级串回路的飞行控制策略,据此给出系统主要资源配置并设计了控制系统总体结构。以飞行控制计算机为重点,设计了基于 MPC5644A控制计算机硬件系统,在基础上开发了一套机载控制软件和上位机软件,并应用于飞行器中。该款控制系统经飞行仿真试验验证,达到预期效果,为涵道无人飞行器控制系统设计提供了一种新的解决方案。
[1] 任小璐.涵道式无人飞行器系统的建模与控制策略研究[D].哈尔滨:哈尔滨工业大学,2008.
[2] 李远伟,奚伯齐,伊国兴,王常虹.小型涵道式无人机的研究进展[J].哈尔滨工业大学学报,2010(5):700-704.
[3] Jean Michel Pflimlin, Philippe Souères, Tarek Hamel, Robert Mahony.Position Control and Attitude Stabiliza -tion of A Ducted Fan Vtol UAV in Crosswind[J].IFAC Proceedings Volumes,2006,3915.
[4] 赵洪亮.小型涵道式无人机控制系统设计实现[D].哈尔滨:哈尔滨工业大学,2009.
[5] 刘立.一种小型涵道无人机研究设计[D].北京:北京邮电大学,2009.
[6] 谢建国.新型涵道无人飞行器飞行控制策略研究[D].南京:南京航空航天大学,2013.
[7] 张辉,黄祥斌,韩宝玲,等.共轴双桨球形飞行器的控制系统设计[J].单片机与嵌入式系统应用,2015(12):74-77.
[8] 王梦,谢建国,夏鹏巍.新型涵道无人飞行器基本控制律设计[J].电子设计工程,2013,21:158-160.
[9] MPC5644 Reference Manual.NXP Semiconductor, 2010.http://www.nxp.com.
付江玲(硕士研究生),主要从事先进飞行器设计方向的研究。
Control System of Ducted Fun UAV
Fu Jiangling,Cao Dong,Lv Xunhong
(College of Automation Engineering,Nanjing University of Aeronautics&Astronautics,Nanjing 211106,China)
The ducted fun UAV(Unmanned Aerial Vehicle) is a vertical take-off and landing(VTOL) aircraft.The control system is the key component of the ducted fun.From the engineering application requirements,a control system with high performance-price ratio,compact structure and low-power consumption is designed and implemented for the ducted aircraft.The control strategy and the overall structure of the control system are introduced.The hardware and software system are designed to realize attitude and trajectory control and flight simulation experimental test is taken.The experiment results indicate that the solution is correct and workable.
control system;ducted fun UAV;MPC5644A;PID control
TP273
A
迪娜
2016-11-18)
猜你喜欢
装备环境工程(2022年9期)2022-10-13
凤凰动漫(军事大王)(2022年1期)2022-04-19
兵器装备工程学报(2021年12期)2022-01-11
自动化学报(2019年6期)2019-07-23
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
电子制作(2018年2期)2018-04-18
电子制作(2018年1期)2018-04-04
科学与财富(2018年1期)2018-03-03
制造业自动化(2017年2期)2017-03-20
