
基于小波变换的磁悬浮轴承冗余位移传感器故障诊断方法
2017-04-27 05:25胡业发
制造业自动化 2017年4期
胡 俊,胡业发,程 鑫,宋 劭,陈 强
(1.武汉理工大学 机电工程学院,武汉 430070;2.中国舰船设计研究中心,武汉 430070)
基于小波变换的磁悬浮轴承冗余位移传感器故障诊断方法
胡 俊1,胡业发1,程 鑫1,宋 劭2,陈 强1
(1.武汉理工大学 机电工程学院,武汉 430070;2.中国舰船设计研究中心,武汉 430070)
对位移传感器进行故障诊断,采用冗余位移传感器技术,可有效的提升磁悬浮轴承系统的可靠性。针对磁悬浮轴承系统中交叉冗余方式的位移传感器,提出了一种结合硬件冗余和小波分析的磁悬浮轴承传感器故障诊断方法。通过冗余传感器输出值间的数值关系来初步判断系统中是否存在故障传感器,结合传感器输出值经小波变换后的信号中的局部极大值来进一步识别已故障了的传感器,并判断故障类型。基于MATLAB的仿真模型进行了仿真分析。仿真结果表明,提出的方法不仅能有效地识别故障传感器,判断传感器的故障类型,还能为磁悬浮轴承传感器容错控制提供基础。
磁悬浮轴承;冗余位移传感器;小波分析;故障检测
0 引言
由于磁悬浮轴承具有无机械摩擦、无机械磨损、无需进行润滑,易于实现高速转子,支承特性可控等突出优点,因此被用于空间技术、高精度磨床、真空泵、离心机、压缩机以及人工心脏泵等[1]。但由于磁悬浮轴承系统的具备开环不稳定特性,必须依赖位移传感器构成闭环控制来实现转子稳定,因此位移传感器成为了磁悬浮轴承系统的关键环节。
常规的位移传感器采用电涡流传感器,具备灵敏度高、分辨率高且无需与被测物体直接接触等优点;但为节省空间,其探头经常放置在转子附近位置,其工作环境比较恶劣,容易发生故障。而一旦发生故障,转子控制闭环被破坏,转子必将失控而跌落,造成恶劣后果。因此,应对传感器进行故障诊断尤为重要[2,3],并采用冗余传感器技术来提高磁悬浮轴承系统可靠性。
冗余位移传感器技术的原理是在同一方向设置多个传感器,每个传感器都对转子信号进行实时监控检测,当多个传感器工作正常时,其检测值皆送入控制器进行处理;当某个传感器出现故障时,就使用余下的传感器替代已故障的传感器从而使系统正常工作[4]。这样在磁悬浮轴承工作时,若某传感器失效,仍然可以通过其他传感器继续获取有效位置信息,从而保持磁悬浮轴承系统的稳定性。可见冗余传感器技术能显著提供磁悬浮轴承系统的可靠性,但如何判断冗余多位移传感器中的故障是亟待解决的问题。
小波变换现在已经开始广泛应用于传感器故障检测。李辉[5]等研究了单输入单输出传感器系统下利用连续小波分析的极值点来诊断传感器故障的方法,该方法通过小波变换后的高频信息的极值点来分析信号的突变由此来判断传感器故障。龚瑞昆[6]提出一种具有较高抗噪声能力且对模型依赖度小的离散小波传感器故障诊断方法。鲁军等[7]将小波分析用在磁控形状记忆合金振动传感器信号处理及故障诊断,不仅可以准确地检测到信号突变点而且可以有效地滤除信号中的干扰成分。可见,基于小波分析进行故障诊断,不仅对模型的依赖度小,更具有灵敏度高、故障诊断率高以及高的抗噪干扰能力。
但小波变换只能检测信号的突变,信号有突变时不一定是传感器发生了故障,也可能是执行器控制器等发生故障。因此,针对信号在小波变换不同尺度下信号特征有所差异的特点[8],并结合实际应用中冗余电涡流位移传感器硬件布置方案,可以充分应用小波分析灵敏度高,对模型依赖小,同时也克服小波变换对于磁悬浮轴承冗余位移传感器应用中的不足,因此,文章采用了通过将小波变换与传感器冗余技术相结合的磁悬浮位移传感器故障诊断方法,通过多传感器之间的位置冗余关系来判断故障是否存在,通过传感器信号的小波变换结果来确定传感器故障故障类型。
1 位移传感器硬件冗余与故障分析
冗余位移电涡流位移传感器布置形式采用如图1所示交叉冗余布置形式,传感器正常运行时采用S1和S2传感器,一旦这两个传感器中有一个出现异常时,就启用备用的S3传感器和无异常传感器构建新的测量系统,该布置形式可为磁悬浮轴承位移传感器的容错控制提供硬件基础。
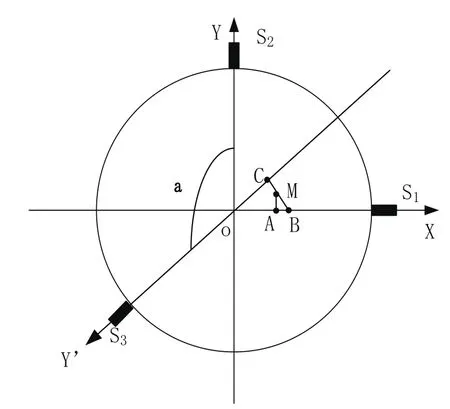
图1 传感器冗余布置形式
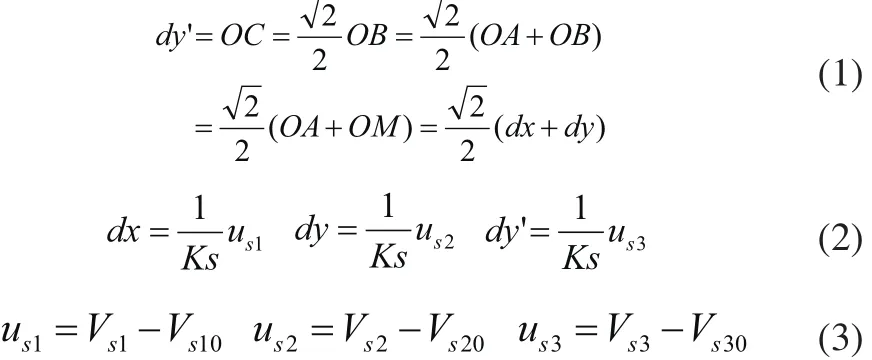
式(1)中,M为转子轴心,dx、dy和dy′分别为转子轴心在传感器S1、S2和S3方向的位移坐标值,us1、us2和us3为传感器输出值的偏移量;式(2)中,Ks为传感器增益,默认三个传感器为同一型号,其性能相同,传感器增益相同;式(3)中Vs1、Vs2和Vs3为传感器S1、S2和S3的输出值,Vs10、Vs20和Vs30为标定的传感器中心位置的坐标值,即转子刚好悬浮在中心位置时传感器S1、S2和S3的输出值。
由式(1)和式(2)可以得到:

实际情况下,几个传感器的特性不可能完全相同,而且传感器安装时会出现位置偏差,使得X、Y与Y’轴的中心并不重合。定义一个允许误差容量M,若三个传感器的输出值符合式(5)时:

认为传感器处于正常状态未发生故障,若不符合式(5)时,则认为三个传感器中有一个发生了故障(因为本研究是为磁悬浮轴承的容错控制提供基础的,因此认为只有一个传感器发生了故障)。但无法判断具体哪个传感器发生了故障,因此需要结合小波变换对三个传感器的输出值进行分析来判断具体哪个传感器发生故障及故障时间。
基于复杂网络的虚拟品牌社区意见领袖识别研究——以魅族Flyme社区为例 魏思敏,张宪华,张祯,孟庆春,张夏然(11-26)
2 冗余位移传感器小波变换故障诊断
小波分析是由傅立叶变换的基础上发展而来,已经广泛用于信号及图像的处理,系统故障的诊断与检测等领域,它的原理是信号平移和伸缩下的不变性,在信号能表达原有信息的基础上,将信号分解成不同频率和尺度下的分量,从而使得信号具有良好的时域和频域的特征[9]。
一维连续小波变换(CWT)表达式为:
实际上磁悬浮转子稳定悬浮时,传感器输出信号本身存在波动和噪声干扰,可以通过小波变换的模极大值来确定突变点,来更准确的判定具体的故障突变时间点,采用通过设定一个阈值的方法,略去小波系数模值小于某一值的信息,这是因为信号在正常波动以及噪声干扰时的小波变换模值是比较小,通过设定这一阈值λi可以去除转子稳定悬浮时信号本省波动及噪声部分的影响。提取磁悬浮转子稳定悬浮时传感器正常情况下时的输出信号,假设其信号经过小波变换后重构的高频分量为di,小波分解的高频分量小波系数为cdi则阈值计算方法如下 :

当模值(小波系数绝对值)大于λi时的点为信号的奇异点。对应传感器发生故障的点,综合考虑小波分解后高频分量及其模极大值即可判断传感器的故障类型和时间。
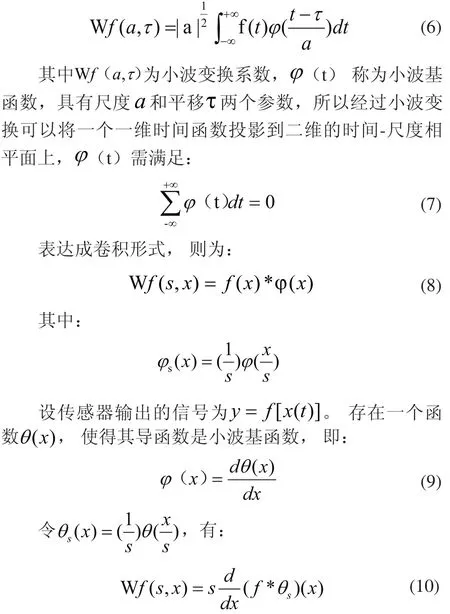
诊断方法的基本流程图如图2所示,具体步骤如下。
图2 诊断方法的基本流程图
1)首先确定阈值M和λi:标定传感器中心位置Vi0,在传感器未发生故障,磁悬浮轴承转子稳定悬浮的情况下采集三个传感器的输出信号Vi,计算阈值M,对传感器的输出信号进行小波变换,计算小波变换后的高频信号的小波系数的绝对值|cdi|,确定阈值λi,使得

3)判断发生故障的传感器及其故障类型:对传感器1和传感器2的输出信号分别进行小波变换得到小波变换后高频信号的小波系数的绝对值|cdi|,若传感器1的输出值满足|cdi|>λi则认为传感器1故障;若传感器2的输出值满足|cdi|>λi则认为传感器2故障;若传感器1和传感器2的输出信号均满足|cdi|≤λi,则发生故障的传感器为传感器3。通过重构信号的高频部分变化来判断传感器故障的类型。
时,认为三个传感器中存在至少一个传感器发生了故障。
3 仿真与分析
基于MATLAB/simulink建立其仿真模型,来模拟传感器的几种典型故障从而提取传感器的各种故障信号。如图3所示为磁悬浮轴承静态悬浮时的仿真框图,功放传递函数:
转子力学模型:
对转子施加一个幅值为100N,频率为400Hz的正弦信号来模拟转子转动时的离心力f(t)的干扰,由于传感器在实际测量时不可避免的会引入噪声干扰,因此对系统施加一个方差为0.01V,采样频率为1kHz的高斯白噪声e(t)来模拟存在强噪声干扰。仿真时间为4s,t=2s时对传感器1施加故障,V1,V2和V3分别为得到的传感器的输出信号。
对传感器1的输出信号进行了一维连续小波分解。小波基函数选用了“db5”函数,分解层数为4。d4为分解后的高频细节信息,a4为低频逼近信息,|cd4|为高频信号d4的系数的绝对值即模值分布(其中令小波系数绝对值小于阈值的为0),小波尺度a=16,设定阈值为λ4=0.048。综合考虑a4,d4和|cd4|来判断传感器是否发生故障以及故障的类型和发生时间。
图3 仿真系统的基本框图
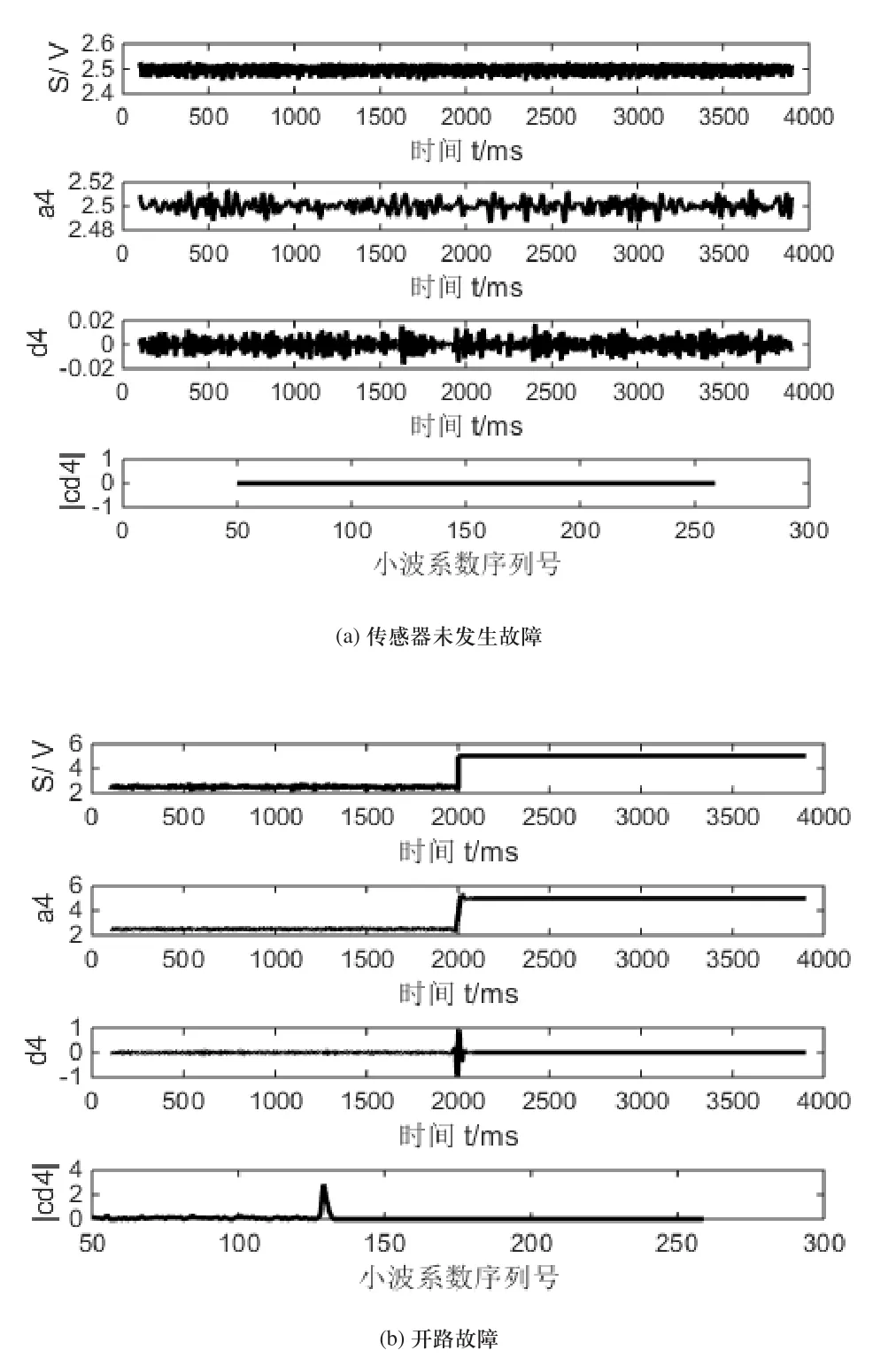
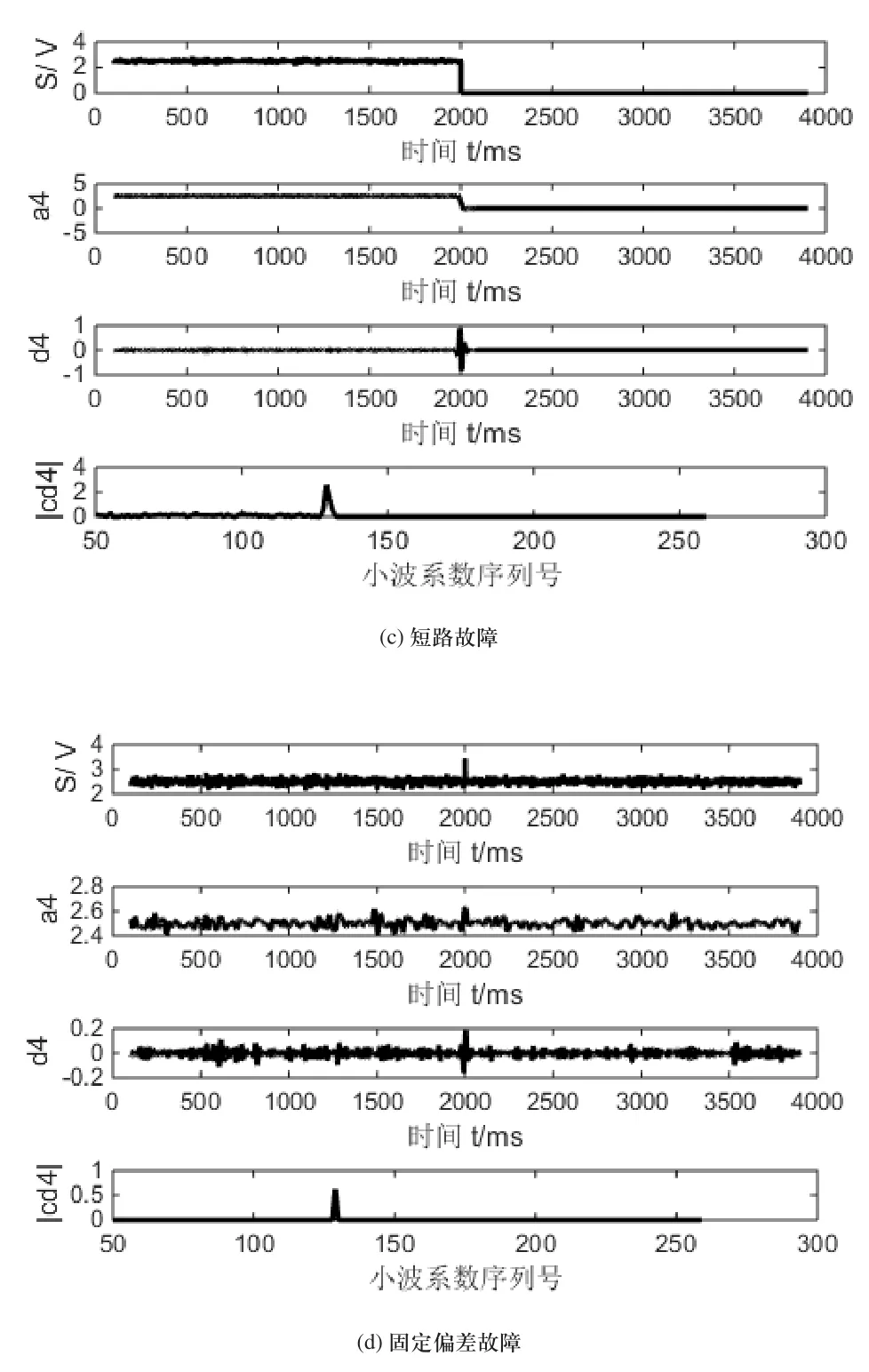
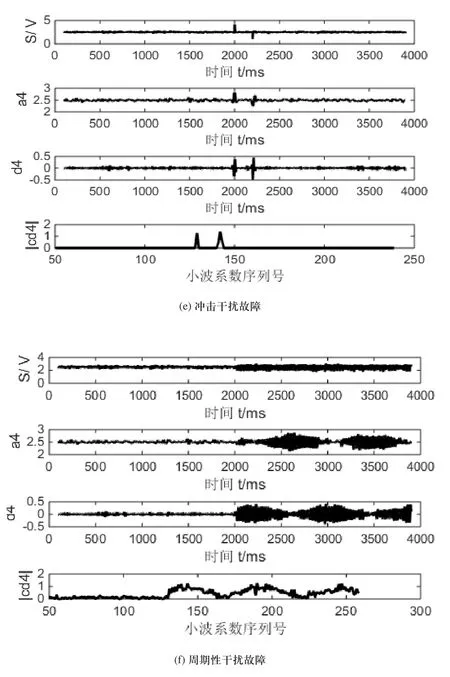
图4 传感器信号的小波分析
如图4所示,传感器未发生故障时|cd4|恒为零,当|cd4|存在不等于0的点时,传感器的输出信号存在突变,即传感器发生故障。根据突变点的位置即可判断故障发生的时间位置,t=a×n(a为小波变换的尺度,n为小波系数序列号)。在图4(b)、(c)、(d)、(e)和(f)中均可明显看出|cd4|存在不等于0的点,根据|cd4|信号中突变点的情况可以将突变分为三种类型。
1)如果|cd4|信号中只存在一个突变点,如图4(b)、(c)、(d)所示,观察低频信号a5,若故障发生后传感器输出恒为5V,如图4(b)中a5低频信号可以看出t=2000ms后信号恒为5V,即可判断传感器发生了开路故障;若故障发生后传感器输出恒为0V,如图4(c)所示,即可判断传感器发生了短路故障;若故障发生后传感器输出信号仍在2.5V左右波动如图如图4(d)所示,则可判断传感器发生了偏置故障。
2)如果|cd4|信号中只存在相邻很近的两个突变点,如图4(e)所示,即可判断传感器发生了冲击干扰故障,在冲击信号的上升沿和下降沿存在两个突变点。
3)如果|cd4|信号突变后信号为周期性信号,如图4(f)所示,突变点后的|cd4|信号为正弦波动信号,即可判断传感器发生了周期性干扰故障。
4 结论
推导了冗余位移传感器其三个输出值之间的固定关系,提出了一种结合硬件冗余和小波变化的磁悬浮轴承冗余传感器故障诊断方法。该方法可以克服单一采用小波分析无法判断信号突变是由传感器故障引起这一缺点,而且减少了采用硬件冗余判断传感器故障时所需要的传感器数量,并且为磁悬浮轴承位移传感器的容错控制提供了硬件基础。
[1] 曾励,王晓青.磁悬浮轴承的原理及现状[J].现代制造工程,1999,(5):29-30.
[2] 崔东辉,徐龙祥.基于自适应滤波的主动磁悬浮轴承位移传感器故障识别[J].南京航空航天大学学报,2009,41(3):364-369.
[3] 陈卫兵,茅靖峰.磁悬浮系统的变速趋近律滑模控制[J].制造业自动化,2010,32(6):80-83.
[4] 崔东辉,徐龙祥.基于坐标变换的径向主动磁轴承容错控制[J].控制与决策,2010,25(9):1420-1425.
[5] 李辉,张安,徐琦,黄治军.连续小波变换在传感器故障诊断中的应用[J].传感技术学报,2005,18(4):777-781.
[6] 龚瑞昆.离散小波变换在传感器故障诊断中的应用[J].仪器仪表学报,2001,22(Z1):237-239.
[7] 鲁军,李侠,王重马,于庆洋,高琳,吴立天.基于小波分析的MSMA振动传感器信号处理与故障检测[J].电工技术学报,2015,30(10):354-360.
[8] 赵劲松,李元,邱彤.一种基于小波变换与神经网络的传感器故障诊断方法[J].清华大学学报(自然科学版),2013,(2):205-209,221.
[9] 李宏男,孙鸿敏.基于小波分析和神经网络的框架结构损伤诊断方法[J].地震工程与工程振动, 2003, 23(5):141-148.
Fault diagnosis of redundant displacement sensor for magnetic bearings based on wavelet transform
HU Jun1, Hu Ye-fa1, CHENG Xin1, SONG Shao2, CHEN Qiang1
TP227
A
1009-0134(2017)04-0079-05
2017-02-03
国家自然科学基金项目资助(51575411)
胡俊(1991 -),女,山西文水人,硕士研究生,研究方向为磁悬浮轴承控制系统及其传感器故障诊断。
猜你喜欢
哈尔滨轴承(2022年2期)2022-07-22
中国特种设备安全(2022年3期)2022-07-08
小猕猴智力画刊(2022年4期)2022-05-23
哈尔滨轴承(2022年1期)2022-05-23
科技风(2021年19期)2021-09-07
哈尔滨轴承(2021年2期)2021-08-12
小学科学(学生版)(2021年4期)2021-07-23
哈尔滨轴承(2021年1期)2021-07-21
电子制作(2019年13期)2020-01-14
军事文摘(2017年16期)2018-01-19
