
基于编码器的自动划线装置设计
2017-05-17 10:31李鑫潘俊贤李彪张志强李卫
中国高新技术企业 2017年6期
李鑫+潘俊贤+李彪+张志强+李卫
摘要:在机械加工中,为了确定加工的位置,常常需要划线定位,普通的手持式人工划线装置容易引起较大的人为误差。为了减小该误差,文章设计了两种基于编码器的自动划线装置,一种适用于长形毛坯、管材等,另一种适用于块状毛坯。两种设计结构简单,电路精简,具有较好的实用性。
关键词:编码器;自动划线;钢丝绳传动;机械加工;划线定位 文献标识码:A
中图分类号:TP391 文章编号:1009-2374(2017)06-0018-02 DOI:10.13535/j.cnki.11-4406/n.2017.06.009
在机械加工过程中,为了对工件的加工位置进行定位,经常会涉及到对工件进行划线。我们常用一些手工工具进行测量和划线,但是手工划线时不稳定,容易产生人为误差。为了减小误差,我们设计了一种基于编码器的自动划线装置。
编码器(Encoder)把角位移转换成电信号,以方便传输和存储。本装置采用增量型AB向编码器,增量式编码器将位移轉换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。
本文详细阐述了该划线装置的机械结构和电路设计,我们在制作了实物后进行了测试,确定该装置的精度满足要求。
1 机械结构设计
经过我们的调研,发现需要加工划线的主要是两种情况,一种是加工长形棒材和一些管材,如铝方管,角铝;另一种是短小的毛坯料,如铝块等。因此我们分别设计了两种结构,分别适用于不同形状的毛坯。
1.1 长形工件划线装置
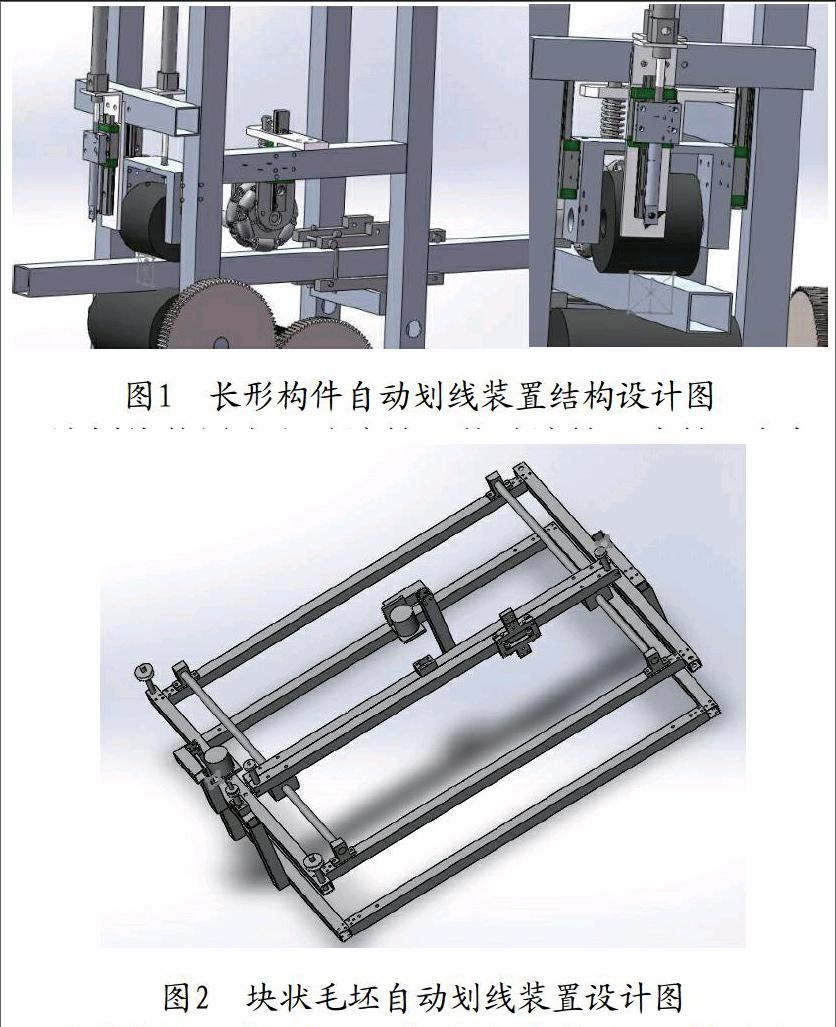
第一种装置用于对长形棒材或管材进行划线,如铝方管、钢材等。结构设计如图1所示:
该划线装置由主动滚轮、从动滚轮、齿轮、气缸、全向轮等构件组成。工作时,将工件通过平台置于主动轮弧形槽内,弧形槽具有限位作用,前方刀具平面限制铝方管轴向移动。电机通过齿轮传动,带动主动轮转动,气缸击出,压紧工件,依靠摩擦作用,工件向外延伸,后方全向轮上配置了一个编码器,全向轮直径20mm,全向轮每转动360°,输出800个脉冲,由:
通过角编码器输出的脉冲数,将旋转位移转换成直线位移,即可计算出管件外升的准确距离,精度较高,满足使用要求。
1.2 块状毛坯划线装置设计
对于块状毛坯,我们则设计了另一种基于编码器的自动划线装置,如图2所示:
该结构由一个X轴、一个Y轴框架构成。X轴采用光杠加直线轴承方式传动,Y轴采用导轨滑块传动,两者均用钢丝绳与编码器连接,均可以保证较高的精度,同时该结构配备了一个可以升降的z轴,z轴上有划线刀具,整个机构属于3自由度机械结构。
工作时,X轴和Y轴均通过钢丝绳与滑轮和编码器连接,钢丝绳将直线位移转化为角位移。块状毛坯固定在装置中间,分别拉动X轴和Y轴,做一个类似于机床加工的对刀过程,将编码器调零,然后直接划线,方便快捷,避免了人为误差的产生。
2 电路设计
2.1 工作原理分析
整个系统电路方面的功能由编码器和STM32C8T6单片机最小系统组合实现,我们使用的编码器为增量型AB向编码器,其工作原理为每转过单位的角度就发出一个脉冲信号,又因为A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,而且通过取A相、B相的上升和下降沿可以进行2或4倍频。我们现在所用的是400转2倍频,即转一圈发出800个脉冲。
脉冲信号的采集由单片机实现,利用STM32的定时器中的计数功能,使用编码器模式,识别编码器的正反转。在正转时,定时器中的计数器累加计数,反转是计数器递减计数。
当需要测量时,在测量初始位置时将计数器置零,而后开始测量。在程序中将编码器走过的角位移转化为被测量工件的长度,最终通过OLED屏幕显示出来。
2.2 程序设计
3 实物制作及测试
根据上面的结构设计和电路设计,我们将机械结构和电路结合起来,制作了两套分别针对长形材料和块状毛坯划线的装置。
为了验证该自动划线装置的功能,我们分别进行了测试。实验证明这两种装置划线方便快捷,而且精度均在0.08mm左右,满足一般使用要求。
4 结语
测试结果表明这两种基于编码器的自动划线装置具有较高的精度,满足平常加工的要求。其结构设计和电路设计稳定简单,使用方便。同时我们还将继续优化程序的设计,选用更适合的编码器提高精度,改善装置中的夹具,在划线时更加方便,完善后可以考虑将这个产品市场化。
参考文献
[1] 谢进,万朝燕,杜立杰.机械原理[M].北京:高等教育出版社,2009.
[2] 吴昌林,张卫国,姜柳林.机械设计[M].武汉:华中科技大学出版社,2011.
[3] 陶俊,袁建军,张伟军,万志成.钢丝绳传动四自由度机械臂的机构设计[J].机械与电子,2008,(1).
[4] 闫婉,袁建军,张伟军.钢丝绳传动5自由度机器人机构设计[J].机电一体化,2011,(6).
(责任编辑:黄银芳)
猜你喜欢
成都信息工程大学学报(2018年3期)2018-08-29
制造技术与机床(2017年7期)2018-01-19
电子设计工程(2017年20期)2017-02-10
山东工业技术(2016年15期)2016-12-01
现代工业经济和信息化(2016年6期)2016-05-17
现代工业经济和信息化(2016年5期)2016-05-17
电子器件(2015年5期)2015-12-29
探测与控制学报(2015年4期)2015-12-15
机械工程师(2015年10期)2015-02-02
电测与仪表(2014年13期)2014-04-04
