
一种电感数字传感器的循迹小车控制系统设计
2017-05-24 14:45张菁,赵鹏
计算机测量与控制 2017年5期
张 菁,赵 鹏
(榆林学院 能源工程学院,陕西 榆林 719000)
一种电感数字传感器的循迹小车控制系统设计
张 菁,赵 鹏
(榆林学院 能源工程学院,陕西 榆林 719000)
针对传统的以红外反射式传感器为主的循迹小车存在受强光干扰不灵敏、循迹线的铺设色差及线宽要求较高的缺点,提出了以单片机为控制器,LDC1000电感数字转换器和外接线圈作为循迹传感器,结合光电测速电路、驱动电路、LCD显示电路等,实现在跑道标识为一根直径为0.9 mm的细铁丝的平面跑道上稳定运行;具备在运行途中检测跑道上的金属片,实现报警和计数功能;具备实时显示小车运行时间、速度和距离的功能;实验证明,该系统集测量精度高、显示直观及工作性能稳定等优点,采用的非接触、无磁体的感应技术对以导体为循迹标识的小车的设计有一定的指导意义。
单片机;循迹小车;电感数字转换器;循迹传感器
0 引言
智能小车是一个集环境感知、规划决策、自动行驶等功能为一体的控制系统,广泛应用于高温、高压及有毒害气体等人难以现场工作的特殊环境下的救援及辅助探测等工作。市面上广泛存在的循迹小车的循迹模块采用的是红外对射反射式光电传感器,其主要工作于具有白底黑线的跑道上,根据黑白颜色的反射系数不同,实现循黑线行走,在一些特殊场合的使用受到限制[1]。本设计利用电感数字传感器,根据电磁感应原理,使小车按铺设的铁丝为引导轨迹前进,同时兼具金属检测功能,弥补了传统循迹小车的不足。
1 系统结构及原理
小车选用后轮为两轮驱动结构,前方为万向轮起支撑作用,根据后轮的转速调节实现转向的控制;控制器采用国产宏晶科技的STC系列单片机,其中,电源电路为锂离子电池供电;时钟电路为单片机提供稳定的时钟基准,是单片机系统正常运行的前提;复位电路具备上电复位和手动复位两种功能;报警电路实现循迹小车在运行过程中检测到金属片后的报警提示;转速测量电路用来实现运行速度的检测;LCD显示电路用来实时显示小车的运行时间、速度、距离及检测到的金属片的数量;循迹传感器用来搜寻跑道上的金属线;驱动电路则用来提高单片机I/O的带负载能力[2-3]。具体结构如图1所示。

图1 系统结构图
2 理论分析与计算
2.1 检测原理分析
LDC1000的电感检测原理的实质为电磁感应。在LDC1000的线圈上加交变电流,线圈周围产生交变磁场,该磁场范围内的金属表面会产生涡流,涡流的电流与线圈电流方向相反,产生的感应磁场也相反。同时,涡流是金属物体的距离、大小、成分的函数。如果交变电流只加在线圈上,则在产生交变磁场的同时会消耗较大的能量,采用将电容并联在线圈上构成LC并联谐振电路,从而明显降低能量损耗[4-5]。设计中通过检测LDC000的等效并联阻抗RP的大小确定线圈与金属线的距离,实现对金属线的循迹和对金属片的检测功能。
2.2 小车运行距离的计算
转速测量电路是由光电传感器发出的光被目标反射或阻挡时,接收器感应出相应的电信号。由于光电传感器的输出为脉冲信号,单位时间内输出脉冲的数量即小车运行的转数,利用车轮周长与转数的乘积就可以求出小车运行的距离。
3 软硬件设计
3.1 控制电路设计
硬件电路主要包含时钟电路、复位电路、LCD显示电路、驱动电路、光电测速电路及报警电路。其中时钟频率为12 MHz;复位电路是为了预防程序跑飞而设计的,可使单片机及系统各部件处于确定的初始状态,并从初态开始工作,本系统具备上电复位和手动复位两个功能,其中上电复位利用电容的冲放电实现,手动复位利用按键触发实现,其实质为给单片机RST引脚一个高电平并维持2个机器周期;LCD显示电路采用图形液晶显示器LCD12864,为了节省单片机的I/O资源,设计中采用LCD的串行连接方式;光电测速电路采用凹槽式光耦,中间为齿盘与小车电机转轴相连,经过对红外发射光的阻断和导通,其输出端就会产生相应的电平变化,通过单片机计数器的计数和数据处理转换为相应的转速[6];报警电路则利用PNP三极管驱动蜂鸣器实现,当检测到金属片时发出提示音。具体电路如图2所示。
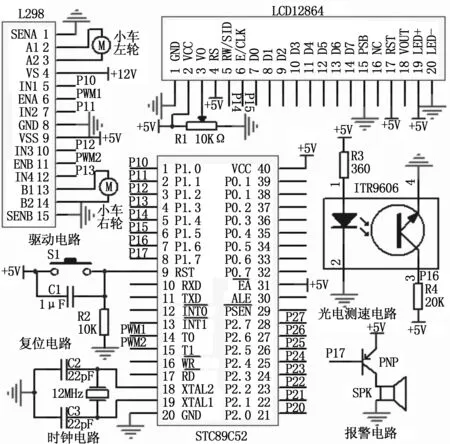
图2 控制电路
3.2 数据采集电路
LDC1000在工作时使用线圈作为感应元件,来测量导电目标内的涡流损耗和总电感,其中导电目标可以是任何导体。在使用LDC1000设计时,由于传感器可以为绕线、PCB上的线圈、用导电油墨印刷的线圈,甚至可以是简单的弹簧,而且无需接触,避免磁体间的磨损,延长系统的使用寿命。设计中采用0.9 mm的铁丝作为循迹轨迹,2 mm厚的不锈钢金属片作为待检测的金属片,LDC1000的线圈采用双层PCB线圈,直径为14 mm,间距和线宽均为4mil。LDC1000对CFA与CFB引脚间的滤波电容的选择较为苛刻,需要选择低泄露,温度稳定性好,压电噪声低的电容,最优的电容值在 20 pF 到 100 nF 之间。电容值由 LC 的谐振时间常数决定,设计中选用温度特性较好的I类陶瓷电容其容值为20 pF,耐压值大于10 V[7-8]。为了减小寄生参数,滤波电容应该尽量靠近芯片且走线要短,数字地与模拟地分开并最终汇聚于一个节点,有利于提高系统的抗干扰能力。具体电路如图3所示。
3.3 主程序设计
主程序是程序的入口,单片机根据数据采集电路中采集的等效并联阻抗RP的值,判断是否为金属线,如果偏离金属线则作出相应控制[9],运行时间的计数通过单片机内部定时器实现。具体流程图如图4所示。

图4 主程序流程图
为确保等效并联阻抗RP的值在采样区间内,同时又保证足够的精度,必须通过寄存器RPMAX和RPMIN合理设置RP的取值范围。对于金属线的循迹RPMAX的设置则通过置于小车底盘的LDC1000的线圈距离金属线最远处,此时涡流损耗最小,RPMAX的值逐渐减小,code值接近3000时选择此时的RPMAX的值;RPMIN的设置则通过将线圈放置于金属线最近处,此时涡流最大,RPMIN的值逐渐增大,code值接近25000时选择此时的RPMIN的值。
4 系统测试
4.1 驱动电路的测试
驱动电路的实质为驱动输出电流,小车的运行速度与小车底盘驱动电机转速和工作电压较为密切,但过高的电压可能对驱动器L298芯片和电机的正常工作产生影响。调试阶段,采用直流24 V开关电源供电,虽然满足电机的工作电压,同时也未达到L298的最高工作电压46 V,瞬间峰值电流3 A,持续工作电流2 A,额定功率25 W的要求,但上电瞬间L298驱动芯片烧毁,原因在于采用开关电源供电,上电瞬间电压大于L298的耐压值,导致芯片被击穿。设计过程中应加散热卡,避免长时间运行导致的过热保护。同时,不同品牌的L298耐压值有差异,设计中建议选择正规厂家的产品。
4.2 PWM调速
系统速度的设置采用PWM调速的原理,利用单片机定时器T0,设定脉冲宽度为t,脉冲周期为T,D=t/T为占空比。则小车运行速度为:
Vd=Vmax×D
(1)
其中:Vmax为小车电机的最大速度。利用Proteus软件对占空比可调的波形进行仿真,其仿真图如图5所示。

图5 PWM调速仿真图
对于小车速度控制符合经典控制理论的基本特点,其中利用转速测量电路检测当前速度,利用PID控制算法实现对其速度的稳定控制,其PID控制系统结构如图6所示。

图6 PID控制结构图
根据小车的特性得出电机转速与电压、运行速度的传递函数,利用单片机软件结合PID算法实现其速度的稳定控制[10]。
4.3 小车的运行检测
以一根直径为0.9 mm的铁丝为循迹对象,在直道上最大运行速度为0.1 m/s,在圆弧半径为20厘米的弯道上,运行速度最大为0.03 m/s。小车在运行途中无偏离跑道的现象,实时速度及运行距离显示正常,系统运行稳定。具体运行实物如图7所示。

图7 小车实物图
5 结论
本文从系统结构、理论分析与计算、软硬件设计及系统测试的角度对基于电感数字传感器的循迹小车的控制系统进行深入的介绍,利用仿真和实物测试相结合的形式证明了系统的可行性。电感数字传感器LDC1000对是否偏离金属线铺设的跑道的检测,实质是对等效并联阻抗RP大小的判断,如果跑道所铺设的金属线的材质、直径或LDC1000的线圈与跑道的垂直距离任何一个发生变化,必须重新设置RP的取值范围。如果RP超出设置范围就会被钳位,如果RP的范围设置过大,而RP的实际取值范围过小则会浪费LDC1000内部A/D转换器的精度,必要时要使用阻抗分析仪。
[1] 余炽业,宋 跃,雷瑞庭.基于STC12C5A60S2的智能循迹小车[J].实验室研究与探索,2014,33(11):46-49,121.
[2] 王 玲,张 强,李雪梅.智能自主寻迹小车测控系统的研究与设计[J].中国工程科学,2014,16(3):92-98.
[3] 尤 扬.基于模糊控制的新型循迹智能小车设计[D].沈阳:沈阳工业大学,2015.
[4] 杨维祎,郭 颖,王雪峰,等.基于TI电子竞赛的金属探测系统设计[J].国外电子测量技术,2015,34(2):54-57.
[5] 张泽华,王晓蕾,张雷雷.基于LDC1000电感数字传感器的墙体电线位置测量仪设计[J].电子设计工程,2015,23(21):79-81.
[6] 沈维佳.多传感器小车的控制系统设计与研究[D].南京:南京理工大学,2015.
[7] 项贤军,周荣晶,王才峄.基于STM32的智能探测小车控制系统设计[J].电子测量技术,2016,39(4):86-89.
[8] 黄 健.一种新型数字电感传感器的设计及应用[J].计算机测量与控制,2015,23(7):2597-2599.
[9] 汤莉莉,黄 伟.基于Aandroid手机蓝牙控制的智能小车设计[J].现代电子技术,2016,39(12):132-134.
[10] 廖先浩.智能小车弯道控制的研究与实现[D].重庆:重庆大学,2014.
Control System Design of Tracking Car with Digital Inductance Sensor
Zhang Jing, Zhao Peng
(School of Energy Engineering, Yulin University, Yulin 719000, China)
With regard to the disadvantages, such as insensitivity under the interference of highlights, the high requirements of the tracking line’s chromatic aberration and line width, of the traditional tracking car, which is mainly based on reflected infrared sensors, this article proposes a control system design which uses Micro Control Unit as a controller, LDC1000 digital inductance converter and external coil as tracking sensor, combines opto-electronic testing velocity circuit, drive circuit and LCD display circuit, etc. Such control system could realize a stable running on a flat runway with a runway identification of a thin wire whose diameter is 0.9 mm. The control system has the function of detecting sheet metals on the runway while running, could realize the alarming and counting functions; and has the function of the real-time display of the car's running time, speed and distance. The experiment indicates that this system has the advantages like a high precision, a clear display and a stable performance, adopts the non-contact, non-magnet sensor technology and has a certain guiding significance to the design of the cars using conductor as tracking identifications.
micro control unit; tracking car; digital inductance converter; tracking sensor
2016-09-08;
2016-12-23。
陕西省教育厅专项科研计划(15JK1864)。
张 菁(1979-),女,陕西府谷人,讲师,硕士,主要从事电路设计与故障诊断方向的研究。
1671-4598(2017)05-0080-03
10.16526/j.cnki.11-4762/tp.2017.05.022
TP273
A
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
电源学报(2022年1期)2022-02-25
通信电源技术(2021年9期)2021-09-23
快乐语文(2020年36期)2021-01-14
电源学报(2020年3期)2020-06-28
汽车与驾驶维修(维修版)(2019年4期)2019-05-09
文苑(2018年22期)2018-11-19
电子制作(2018年8期)2018-06-26
电子制作(2017年1期)2017-05-17
新少年(2017年1期)2017-03-15
