
基于微动调制的FMCW SAR无源压制干扰方法
2017-05-24 14:45朱启明强海斌翁海超
计算机测量与控制 2017年5期
朱启明, 梁 颖, 李 阳, 强海斌, 翁海超
(中国人民解放军95980部队,襄阳 441100)
基于微动调制的FMCW SAR无源压制干扰方法
朱启明, 梁 颖, 李 阳, 强海斌, 翁海超
(中国人民解放军95980部队,襄阳 441100)
调频连续波(FMCW)合成孔径雷达(SAR)体积小、重量轻、成本低、功耗低等优点,在无人机等小型飞行平台中具有较大的应用潜力,对FMCW SAR的干扰也将成为目前干扰技术研究的重点;在构建旋转微动目标回波模型的基础上,分析了FMCW SAR旋转微动目标的干扰特性,并进一步提出了一种基于微动调制的FMCW SAR无源压制干扰方法;该方法利用旋转角反射器在距离向和方位向上形成的二维干扰条带,能够实现对被掩护目标的有效保护;文章详细分析了对FMCW SAR实施干扰时旋转角反射器的参数选择方法,并利用仿真实验验证了理论分析与所提无源压制干扰方法的有效性。
调频连续波合成孔径雷达;旋转角反射器;无源压制干扰
0 引言
调频连续波(frequency modulated continuous wave, FMCW)合成孔径雷达(synthetic aperture radar, SAR)与传统的脉冲式SAR相比,具有体积小、重量轻、成本低、功耗低等优势[1-3],其接收端采用“dechirp”处理体制,回波信号与参考信号进行混频,产生较小的差频带宽,能够降低对视频接收通道、后端A/D采集设备和信号处理速度的要求[4]。同时,调频连续波雷达很大的时宽带宽积,使其难以被传统的侦察机截获,具有良好的低截获概率[5]。这些特点使其非常适合应用于军用小型飞行平台,大大提高了SAR在军事应用中的作战能力。世界各国分别对FMCW SAR系统的研制展开研究[6-8],特别的美国Brigham Young大学研制的采用FMCW SAR工作体制的MicroSAR系统重量仅为2 kg[8]。
如何保护己方重要目标不受敌方的SAR识别和提高己方SAR的抗干扰能力,一直是从事干扰技术研究和SAR成像技术研究的重要课题之一。对SAR的无源压制干扰主要是依靠角反射器或锡箔条等雷达散射面积较大的干扰目标放置在被掩护目标周围,使被掩护目标淹没在强干扰目标旁瓣中,以达到干扰的效果。基于微动调制的SAR无源压制干扰进一步利用了旋转角反射器旋转在距离向和方位向上形成的微动干扰条带,实现对重要目标的有效掩护[9-10]。FMCW SAR信号为保证较低的发射功率,通常设置较长的脉冲持续时间,因此在FMCW SAR信号处理中,通常需考虑载机连续运动引起的距离变化,因此与传统的脉冲式SAR信号处理模式不同。本文通过构建FMCW SAR旋转目标回波模型,首先分析了旋转目标对FMCW SAR成像的干扰特性,并对旋转角反射器的参数选择进行了论述,提出一种利用旋转角反射器实现FMCW SAR无源压制干扰的方法。最后的仿真实验验证了理论分析与所提无源压制干扰方法的有效性。
1 干扰信号模型
FMCW SAR成像几何模型如图1所示,载机沿x轴方向以速度v飞行,飞行高度为h。假设场景方位向中心处存在一旋转目标点P,旋转半径为r,旋转频率为fP(角频率ωP=2πfP),初始相位为θ0,旋转中心与雷达平台之间的距离为R0。
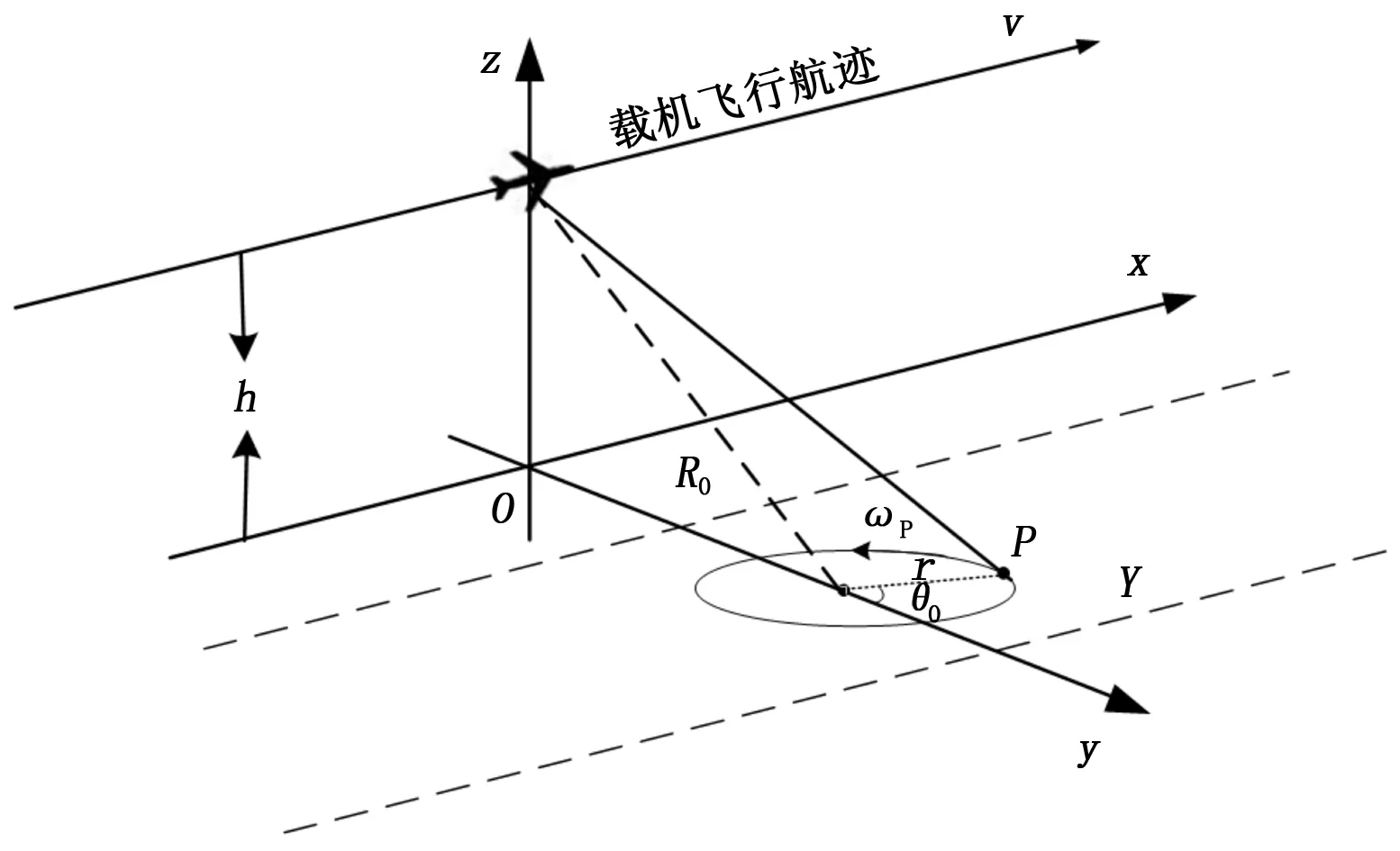
图1 FMCW SAR成像几何模型
由于FMCW信号是在一个脉冲持续时间内连续的发射信号,且脉冲持续时间较长,传统的脉冲式SAR所采用的“一步一停”工作模式不再适用,需考虑平台连续运动引起的距离变化。因此,旋转点P与载机之间的瞬时斜距应表示为:
(1)
其中:t=tk+tm为全时间,tk和tm分别表示快时间和慢时间。将式(1)进一步展开为关于快时间tk的一次项:
(2)
(3)
式(2)中第二项为旋转点在脉冲持续时间内引起的距离变化;第三项为载机连续运动引起的脉内多普勒频移项,在后续的处理可通过在方位多普勒频域构造多普勒频移补偿函数对该项进行补偿。
雷达发射FMCW信号,旋转点回波信号经去调频处理后,差频信号可表示为:
(4)
其中:σP为旋转点P散射系数,c表示光速,λ为载波波长,RΔ(t)=R(t)-Rref,Rref为参考距离。是(4)中最后一项为剩余视频相位(RVP)项,是FMCWSAR采用去调频处理所产生的特有的相位项,对该项的补偿可在方位多普勒频域完成[8]。本文在后续的分析处理中忽略了该项的影响,将式(2)带入上式得:
(5)
其中,第一个指数项为距离成像因子;第二个指数项为方位向成像因子;第三个指数项为载机连续运动引起的多普勒频移项,该项为快时间和慢时间的耦合项,对多普勒频移的补偿,需在方位多普勒频域完成。对式(5)进行方位向傅里叶变换,并构造多普勒频移补偿函数完成补偿:
HD(tk,fa)=exp(-j2πfatk)
(6)
其中:fa表示方位多普勒频率。经多普勒频移补偿后回波信号变换到二维时域,表达式为:
(7)
2 干扰特性分析及参数选择
本文以改进的距离-多普勒(R-D)算法[10]为例,对FMCWSAR旋转目标的干扰特性进行分析。首先进行距离压缩处理,即对式(7)进行快时间的傅里叶变换得:
(8)
(9)

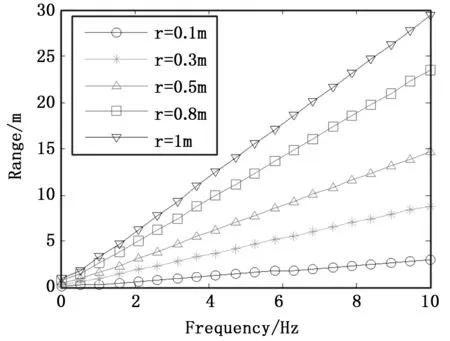
图2 旋转频率与等效旋转半径的关系曲线
对于静止点目标,回波信号经距离压缩后在距离-慢时间谱图表现为一条线,经距离徙动校正后,这条线被校正在同一个距离单元内,对其进行方位脉压处理即可获得该静止点的二维成像结果。但是旋转点回波受旋转点的影响,使回波产生了正弦相位调制,经方位脉压处理后其回波信号表达式为:
(10)
(11)
由式(10)可知,旋转点目标回波经方位脉压处理后,表现为一系列窄脉冲信号的叠加,相邻窄脉冲信号之间的时间间隔为:
(12)
窄脉冲信号的数量,即m的取值范围受Bessel函数Jm(B)的影响。对式(11)作变量代换x=-2πx′,得:
(13)
为避免产生混淆,式(13)仍写为:
(14)
由式(14)可知,Jm(B)实际为一正弦调频信号的傅里叶变换,其频带宽度即为m的取值范围,因此m的取值范围为:
m∈(-B,B)
(15)

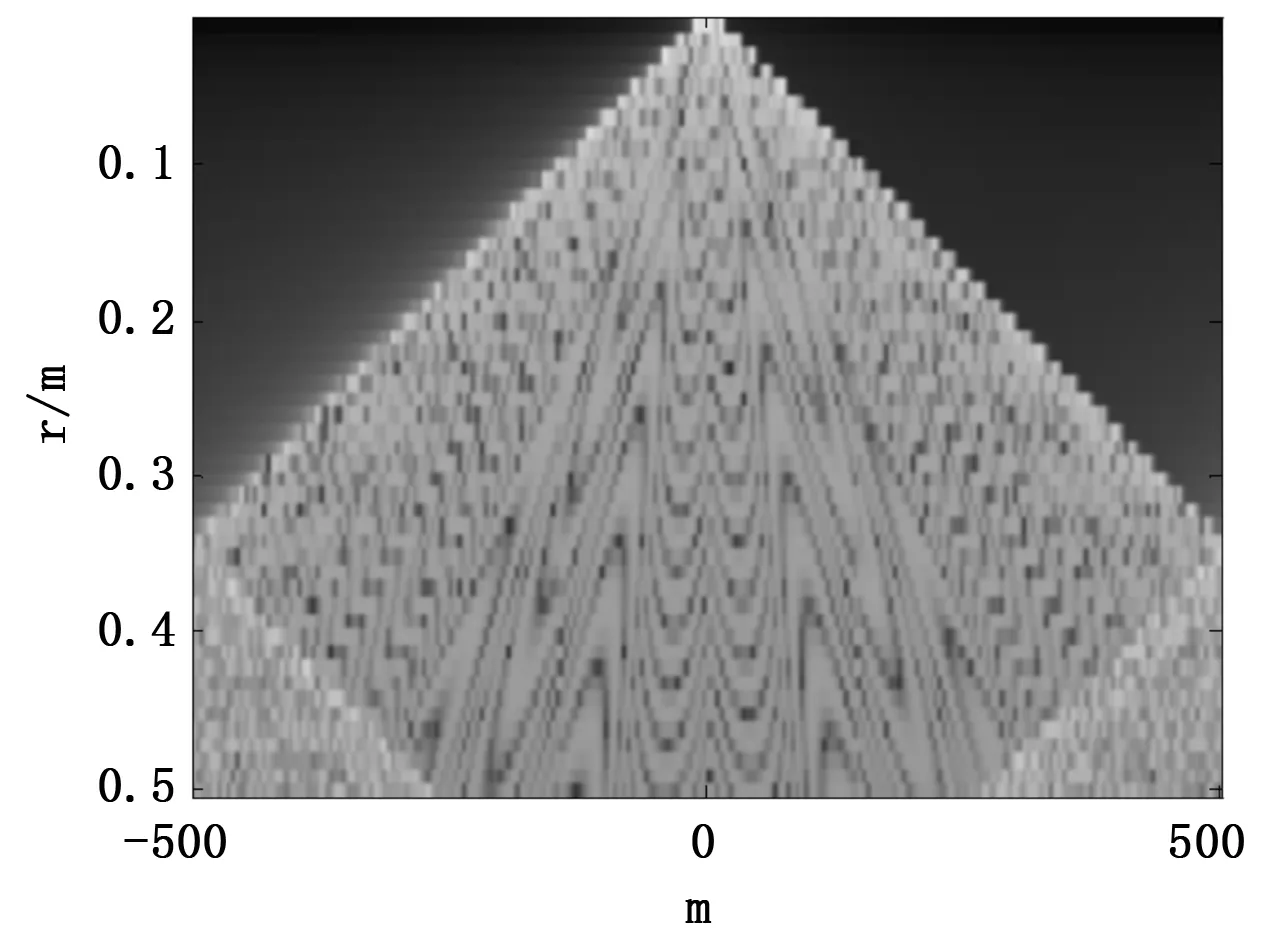
图3 Jm(B)幅度变化图
根据以上旋转目标对FMCWSAR的干扰特性分析,可采用旋转角反射器实施无源压制干扰,通过角反射器在距离向和方位向形成的二维条带实现无源压制干扰。方位向主要是旋转角反射器回波经方位脉压处理后形成的窄脉冲实现干扰,窄脉冲间隔决定了方位向干扰效果。要使窄脉冲覆盖整个方位向条带,即Δx<ρa,ρa为方位向分辨率,则角反射器的旋转频率应满足:
(16)
方位向干扰范围由窄脉冲间隔和窄脉冲个数决定,根据窄脉冲间隔计算在方位向干扰范围为La时所需的方位向窄脉冲个数为:
(17)
其中:Ts为合成孔径时间。由于窄脉冲个数满足以下关系式:
(18)
其中:floor{·}表示向下取整。由此可确定旋转角反射器的旋转半径为:
(19)
(20)
3 计算机仿真验证
设FMCWSAR系统载频为35GHz,带宽为300MHz,脉冲持续时间为1ms,系统采样频率为1.25MHz。FMCWSAR工作在正侧视条带模式,载机飞行速度为200m/s,场景中心点距离载机距离为20km,合成孔径时间为0.86s,距离分辨率及方位分辨率均为0.5m。
3.1 干扰特性分析
首先对旋转目标的干扰特性进行仿真分析,旋转点参数设置如表1所示。
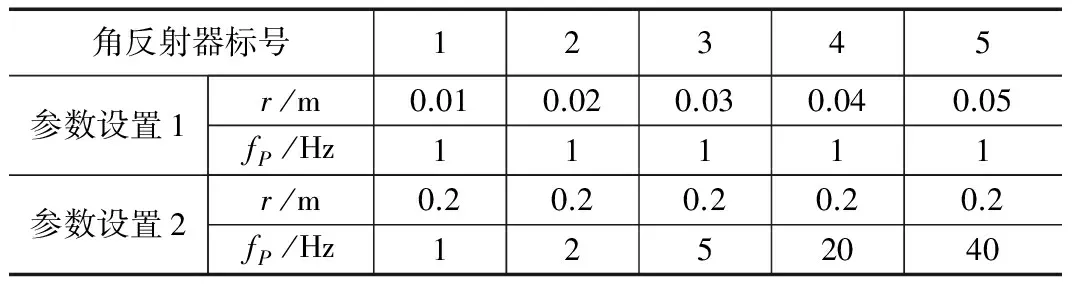
表1 旋转角反射器参数设置
图4给出了在不同参数设置情况下采用R-D算法FMCWSAR旋转目标二维成像结果。在参数1设置条件下,5个旋转角反射器相应的等效旋转半径依次为:0.012m,0.025m,0.037m,0.050m,0.062m,均小于距离分辨率,因此其二维成像结果表现为沿方位向的直线。5个旋转角反射器的旋转频率相同,即二维成像结果中窄脉冲间隔相同,而旋转半径依次增大,相应地窄脉冲个数依次增大,在二维成像结果中表现为干扰调大依次增加;在参数2设置条件下,虽然5个角反射器的旋转半径相同,但是旋转频率各不相同,其等效旋转半径也不同,分别为:0.25m,0.35m,0.76m,2.94m,5.87m。1、2号旋转角反射器的等效旋转半径仍小于距离分辨率,因此其二维成像结果仍表现为沿方位向的直线,而3~5号旋转角反射器的等效旋转半径大于距离分辨率,其二维成像结果表现为沿方位向的条带形式,同时旋转频率大的其窄脉冲间隔大。
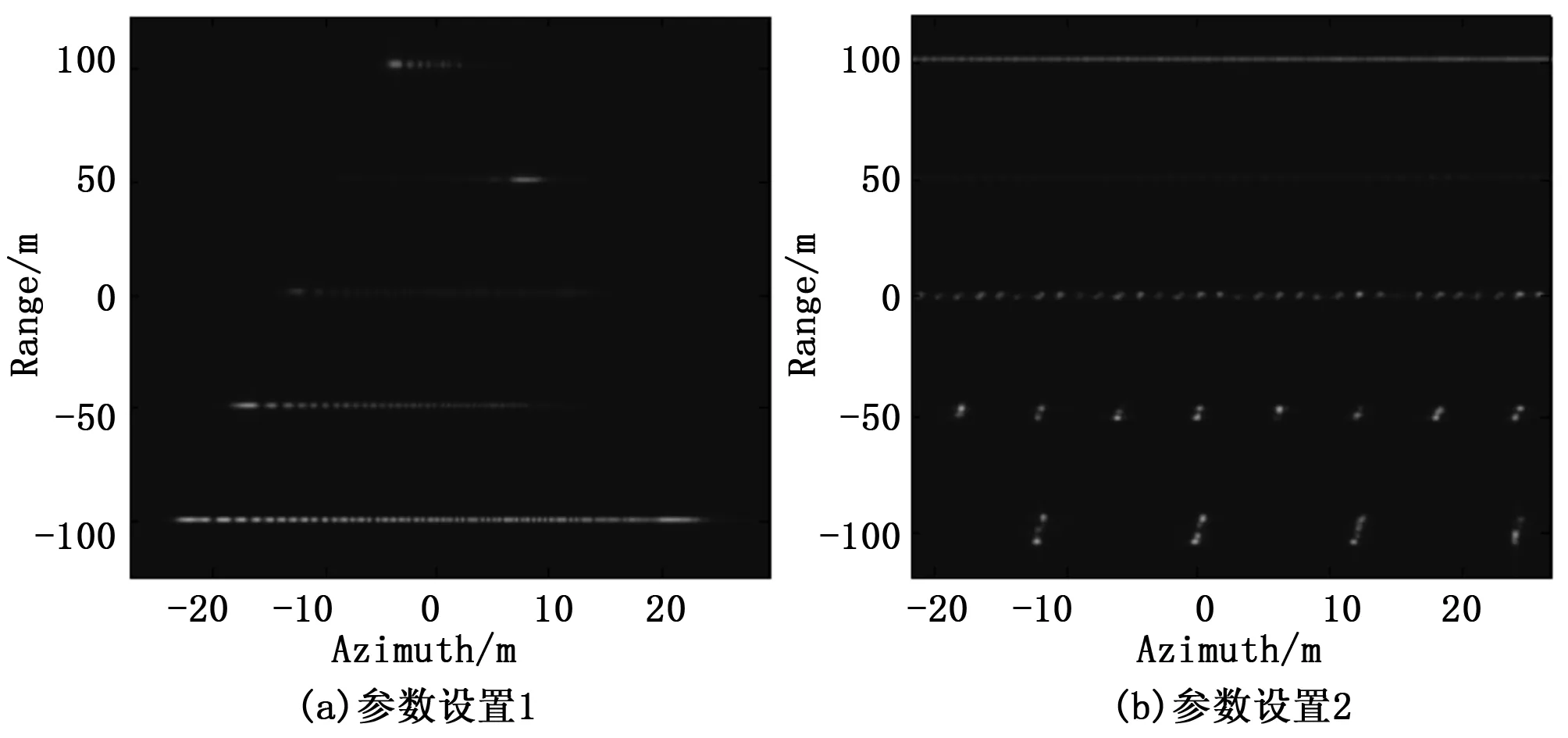
图4 成像特性分析
3.2 干扰效果分析
掩护模型采用66点飞机散射点模型为例,如图5(a)所示,在不存在干扰条件下其二维成像结果如图5(b)所示。
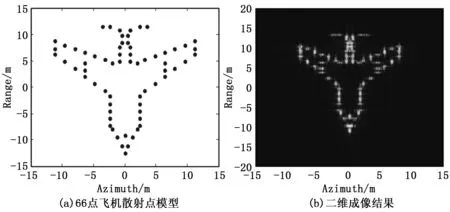
图5 掩护目标模型
根据理论分析结果及掩护模型的尺寸,可设置不同的角反射器参数对其进行掩护,旋转角反射器参数设置如表2所示,旋转角反射器的散射系数是目标点散射系数的30倍。图6给出了不同旋转角反射器参数设置情况下,对FMCWSAR实施无源压制干扰的二维成像结果。
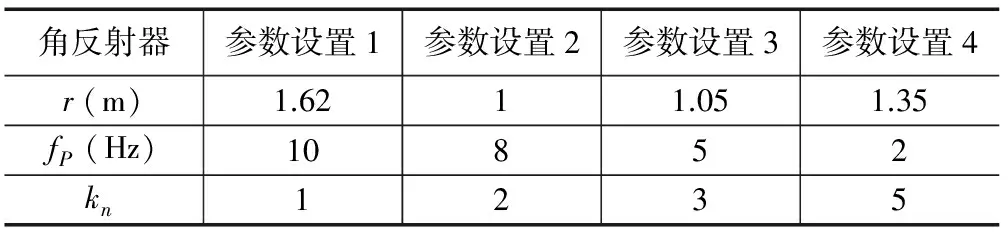
表2 旋转角反射器参数设置
图6给出了不同旋转角反射器参数设置情况下,对FMCW SAR实施无源压制干扰的二维成像结果。不同的参数设置均能使距离向干扰条带覆盖整个被掩护目标,随着旋转频率的降低,方位向形成的窄脉冲间隔不断减小,因此其在方位向干扰效果也不断变好。在参数设置4的情况下,飞机模型已完全淹没在旋转角反射器的回波调制噪声中。

图6 干扰结果
在实际应用中,可根据被掩护目标的具体情况,选择适当的角反射器参数对FMCW SAR系统进行无源压制干扰。
4 结论
FMCW SAR由于其自身的优越性,必将受到越来越广泛的关注,而对FMCW SAR的干扰也将成为干扰技术研究领域的研究热点之一。本文通过分析旋转目标对FMCW SAR的干扰特性,提出了一种基于旋转微动调制的FMCW SAR无源压制干扰方法。通过旋转角反射器在距离向和方位向形成的二维干扰条带,实现了对重要目标点有效掩护。仿真实验验证了理论分析结果与所提无源压制干扰方法的有效性。
[1] Meta A and Hoogeboom P. Development of signal processing algorithms for high resolution airborne millimeter wave FMCW SAR[A]. Rroc. IEEE Int. Radar Conf.’ 05[C]. Arlington, U.S.A, 2005: 326-331.
[2] Meta A, Hoogeboom P and Ligthart L P. Signal processing for FMCW SAR[J]. IEEE Transactions on Geoscience and Remote Sensing, 2007, 45(11): 3519-3532.
[3] Wang R, Luo Y, Deng Y, et al. Motion compensation for high-resolution automobile FMCW SAR[J]. IEEE Geoscience and Remote Sensing Letters, 2013, 10(5): 1157-1161.
[4] Liu Y, Deng Y, Wang R, et al. Efficient and precise frequency-modulated continuous wave synthetic aperture radar raw signal simulation approach for extended scenes[J]. IET Radar Sonar Navig., 2012, 6(9): 858-866.
[5] Adve R. Bistatic FMCW SAR signal model and imaging approach[J]. IEEE Transactions on Aerospace and Electronic Systems. 2013, 49(3): 2017-2028.
[6] M Edrich. Design overview and flight test results of the miniaturized SAR sensor MISAR[A]. Proc. EuRAD’04[C]. Amsterdam, the Netherlands, 2004: 205-208.
[7] Duersch M I. BYU. Micro-SAR: A very small low-power LFM-CW synthetic aperture radar[Z]. Brigham Young University, 2004.
[8] R Wang, OLoffeld, H Nies, et al. Focus FMCW SAR Data Using the Wavenumber Domain Algorithm[J]. IEEE Trans on GRS, 2010, 48(4): 2109-2118.
[9] 刘 阳, 王雪松. 微动特性干扰对基于FrFT的多孔径SAR/GMTI的效果分析[J]. 电子学报, 2011, 9(9): 2039-2045.
[10] 韩国强, 马效尊, 邢世其,等. 对SAR微动调制干扰效果仿真分析[J]. 现代防御技术, 2013, 41(1): 176-182.
[11] 梁 毅. 调频连续波SAR信号处理[D]. 西安: 西安电子科技大学, 2009.
[12] Rigling B D. Image-quality focusing of rotating SAR targets[J]. IEEE Geosci. Remote Sens.Lett., 2008, 5(4): 750-754.
Passive Barrage Jamming Method for FMCW SAR Based on Micro Motion Modulation
Zhu Qiming, Liang Ying, Li Yang, Qiang Haibin, Weng Haichao
( Unit 95980 of PLA, Xiangyang 441100,China)
The frequency modulated continuous wave (FMCW) synthetic aperture radar (SAR) has the properties of compact size, lightweight, low cost and low power dissipation, which provides great potential in the application of small unmanned aerial vehicle (UAV) platforms. The imaging characteristic of rotating target for FMCW SAR is analysed based on the construction of received signal model. In development, a passive barrage jamming method for FMCW SAR based on micro motion modulation is proposed. This method makes use of the rotating angular reflectors to form jamming strips in range and azimuth 2D direction, and then the target screened is protected effectively. The choice of the parameters of rotating angular reflectors is discussed in detail. Finally some simulations are given for validating the theoretical derivation and the effectiveness of the proposed passive barrage jamming method.
FMCW SAR; rotating angular reflector; passive barrage jamming
2016-10-16;
2016-12-15。
朱启明(1986-),男,湖北襄阳人,硕士研究生,主要从事计算机科学与应用方向的研究。
梁 颖(1986-),男,河北唐山人,工程师,博士,主要从事信号处理方向的研究。
1671-4598(2017)05-0155-03
10.16526/j.cnki.11-4762/tp.2017.05.043
TN957
A
猜你喜欢
数字海洋与水下攻防(2020年5期)2021-01-04
北京航空航天大学学报(2020年10期)2020-11-14
小型内燃机与车辆技术(2020年1期)2020-03-27
汽车电器(2019年1期)2019-03-21
雷达学报(2018年5期)2018-12-05
雷达学报(2018年5期)2018-12-05
宇航计测技术(2018年3期)2018-09-08
科技与创新(2017年3期)2017-03-17
电脑知识与技术(2016年22期)2016-10-31
科技与创新(2015年23期)2015-12-08
