
基于主元证据理论在车辆识别中的应用
2017-05-24 14:45宋晓茹
计算机测量与控制 2017年5期
赵 楠,高 嵩,宋晓茹,马 贝
(1.西安工业大学 电子信息工程学院,西安 710021; 2.西安工业大学,西安 710021)
基于主元证据理论在车辆识别中的应用
赵 楠1,高 嵩1,宋晓茹1,马 贝2
(1.西安工业大学 电子信息工程学院,西安 710021; 2.西安工业大学,西安 710021)
车辆识别技术作为智能交通管理系统中的研究热点和难点;在车辆识别技术中,应用Dempster- Shafer证据组合规则融合冲突信息时会产生不合理的结果;基于修正证据源的思想,提出了一种新的权重系数确定方法,该方法从证据主元角度分析,确定各组证据主元,利用该主元求出证据相容度、可信度,进而确定证据权重系数;通过新的证据冲突衡量方法,确定冲突值,归一化权重,修正证据源,按ER规则融合各组证据对目标进行识别;仿真部分以实际路面车辆车型识别为算例,将该方法与其他方法对比,结果表明:该方法能更有效地融合高度冲突的证据,减小计算复杂度,目标识别的准确性提高20%。
主元;权重系数;证据冲突;归一化;目标识别
0 引言
随着我国经济建设的蓬勃发展,机动车拥有量急剧增长,车辆识别技术在智能交通管理系统中被广泛的应用。由于基于单传感器的车辆识别获取信息有限,难以满足实际要求,因此利用多个传感器构成系统,分别识别同一目标,融合探测的信息,形成决策,有助于提高车辆识别的准确性。多传感器信息融合方法中,DS证据推理是常应用于目标识别领域中的一种非精确推理方法。在实际的多传感器系统中,不同传感器获得的目标信息往往存在冲突甚至完全矛盾,DS证据推理不能有效处理冲突信息,进而影响识别效果。针对这一问题,许多学者进行了研究并提出了一系列的改进方法.一类学者认为Dempster规则存在缺陷,需对其进行修正[1-2];文[1]中合成公式是一个加权和的形式,该合成公式在Yager的基础上进行改进,把合取冲突k,1-k作为加权系数,分配给证据平均支持度q(A)、DS中的m(A),该方法虽然克服了Yager的不足,但对目标识别率不高。一类学者认为原因不在于Dempster规则,而在于对问题建模不准确,需要对证据进行预处理,然后再进行组合[3-5]。
各种改进方法虽能提高证据理论融合能力,但基于以上分析,仍存在不足。为确保融合的快速性,识别的准确性,减少计算复杂度。本文提出一种基于主元证据理论改进方法,并通过实际路面车辆型别识别算例,以期该改进方法使高度冲突的合成结果更为理想,对车型识别精度较高。
1 DS证据理论概述与ER规则
Dempster-Shafer(DS)证据理论是1967年Dempster[6]首先提出的,其学生Shafer于1976年针对统计问题做了系统的发展[7]。DS证据理论是种不确定推理方法,对于不确定的、不清楚的信息提供了强有力的合成方法,这使得DS证据理论在多传感器目标识别领域有了广泛的应用。
1.1 DS证据理论的基本概念
在DS证据理论中,识别框架Θ指所研究对象的全集,Θ元素之间相互排斥且为离散值。对于问题域中的任何命题A,都包含于2Θ。定义映射m:2θ→[0,1](2θ为Θ的幂集)记为Ω,则称m为框架Θ上的基本信任分配(basicprobabilityassignment,BPA),且满足:
(1)m(φ)=0;
(2)0≤m(A)≤1,∀A⊆Θ,
DS证据理论提供了一个非常有用的合成公式,使我们能合成多个证据源提供的证据。公式定义如下:
(1)
其中:
(2)
(3)

对多组证据Dempster规则为:
(4)
(5)
k称为n组证据的合取冲突。
1.2 证据推理规则(ER规则)
ER规则使用一种新的证据预处理方法,即加权信度分配(weightedbeliefdistributionWBD),设mi的权重为wi,则其WBD的定义为:
(6)
与证据折扣不同[8],这里1-wi不是分配给了识别框架Θ,而是赋给了框架的幂集Ω,表示的是受m权重限制而保留未分配的信度值;它可以重新分配给框架中的任意子集,具体视其它证据的权重而定。
将原始BPA表示成WBD之后,ER规则使用 Dempster 规则对证据进行合成运算:
(7)
其中:
(8)

2 DS证据理论不足
通过上节分析可知合取冲突k越大,证据冲突越大,k越小,证据冲突越小。对于冲突较小的证据,DS证据推理能得到较好的结果。但对于冲突较大的甚至完全对立的证据,DS证据理论失去融合能力,由于DS将冲突丢弃,有悖于常理的融合结果,如下例所示。
例1:令辨识框架Θ={w1,w2,w3},m1,m2和m3为Θ上来自相异源的三组基本信任分配:
m1({w1})=1,m1({w2})=0
m2({w1})=0.2,m2({w2})=0.8
m3({w1})=0.1,m2({w2})=0.9
采用Dempster规则融合,结果合取冲突k=0.98,融合三组证据结果为:
m1({w1})=1,m2({w2})=0。以上三组证据中,第一组证据对焦元{w2}的信度为0,后两组证据强烈支持焦元{w2}。合成结果中,焦元{w2}的信度值仍然为0,易知该结论与常理相悖的,本来由后两个证据高度支持的w2合成结果为零,这显然是不合理的,因此DS证据理论组合规则失效。
例2:令辨识框架Θ={w1,w2,w3},m1和m2为Θ上来自相异源的两组基本信任分配:
m1({w1})=1,m1({w2})=0
m2({w1})=0,m2({w2})=1
采用Dempster规则融合,合取冲突k=1,合成规则中分母为0,证据无法合成。
上述两个例子可以看出,对于高度冲突的证据运用DS证据理论融合后得到的结果往往有悖于常理。导致发生悖论的原因可以分为两类:一类是冲突分配不合理,如例1;一类是证据高度冲突,如例2。
3 基于主元的证据理论合成方法
DS证据理论在面对高度冲突证据会产生与直觉相反的融合结果,根本原因在于其丢弃了冲突部分的信息。应当意识到,冲突本身也是一种信息,对冲突信息的有效利用,可以提高融合结果的准确性。由于证据源自身条件和工作环境的影响,它们所提供的证据在合成过程中的重要程度不一样,对于多组证据冲突,必定有证据组较大程度支持假设,因此,引入证据主元,利用证据主元在证据合成过程中确定可描述证据重要程度的权重系数。
设在证据合成过程中n个证据源同时提供证据,证据集E={E1,E2,···,En}Ei的权重系数为wi,则所有的权重系数组成了证据源的权重向量:

1)依证据源提供的证据给辨识框架内各命题分配基本概率值,并建立证据源的权重向量,W={w1,w2,w3,...}权重系数确定方法见3.1节。
2)衡量证据间的冲突程度。由文[5]可得权重归一化与否对合成结果有影响,判断权重是否归一化,见3.2节。
3)各个证据权重系数确定后,代入ER规则得到调整后的命题概率分配。
(9)
(w2m2(Θ)+(1-w2))+w2m2(A)(w1m1(Θ)+(1-w1))]
(10)
新的合成公式既继承了ER规则的优势,又充分考虑了各证据的重要性,符合实际。
3.1 基于主元的权重系数确定
介绍证据主元之前,引入下面例子。
例3:令辨识框Θ={w1,w2,w3,w4},m1,m2,m3和m4为Ω上来自相异源的四组证据的基本概率赋值:
m1({w1,w2})=0.99,m1({w4})=0.01
m2({w2,w3})=0.99,m2({w4})=0.01
m3({w1,w3})=0.99,m3({w4})=0.01
m4({w4})=1
由DS证据理论前三组两两合取冲突:k1,2=0.0198,k1,3=0.0198,k2,3=0.0198,k1,4=0.99,k2,4=0.99,k3,4=0.99根据合取冲突易得,前三组证据两两间的差异程度相同,则三组证据两两间冲突程度小,也许前三组证据可以归为一类。然而,这三组证据采用Dempster规则融合,得到m123({w4})=1融合结果将全部的信任分配给了三组证据之间存在隐藏冲突,即三组证据强烈支持命题的交集为空:{w1,w2}∩{w2,w3}∩{w1,w3}=φ。前三组证据和第四组证据存在高度的隐藏冲突。
在实际车辆识别工程实践中,可能会出现多组证据间存在隐藏冲突的情况。因此,需要研究证据类中隐藏冲突判别方法。文[9]中定义主元。
定义1:一组非空证据,有n个非全集焦元,依据其信度从大到小排序,A1,A2,···,Ap,Ap+1,···An,称前p个焦元为证据的主焦元,如果这p个焦元的信度值满足以下两个条件:
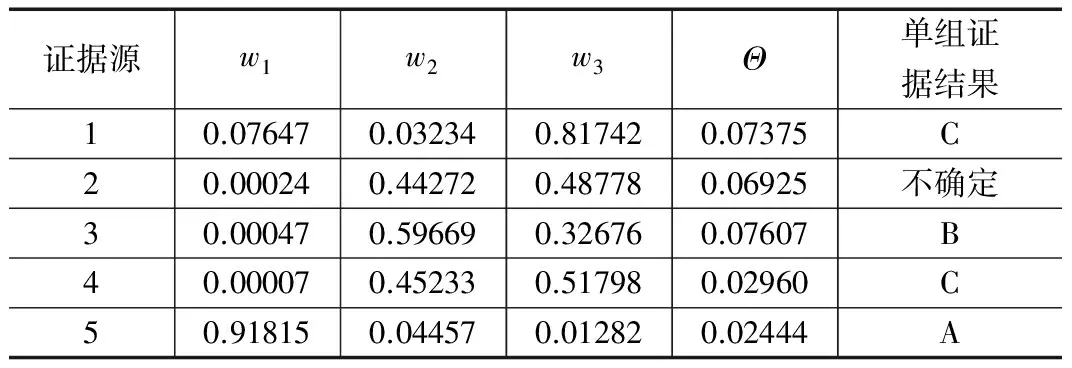
(2)m(A1)-m(Ap) 证据主元即为这p个主焦元的并集,记为LE=A1∪A2∪···∪Ap。 证据之间发生的严重冲突或完全冲突往往是由于某个或少数证据的严重不相容性引起的,受“少数服从多数”的决策思想的启示,在证据合成过程中,引起严重冲突或完全冲突的某个或少数证据的影响作用较小,所以其权重系数就小。本文采用基于以上介绍的证据主元方法来确定各证据的权重系数。其步骤可总结如下: 1)定义2:一个证据E所提供的信息含量e(E)可表示为: (11) 其中:|Ai|是焦元集Ai的基数;n(A)是焦元集的个数。 定义一组证据被另外一组证据支持的程度等于这组证据的主元与另外一组证据的主元相容程度。 2)定义3:假设由n组证据组成的证据集E={E1,E2,···,En}对应证据主元集合LE={le1,le2,···,len},则证据ej的主元对证据ei的主元的相容程度为: j=1,2,···,n (12) 3)系统中对证据体mi的支持程度: (13) 4)mi的支持度归一化得mi的可信度: (14) 5)证据Ei的权重系数wi: wi=si·ei (15) 如此便可确定各证据的权重系数组成的权重向量W={w1,w2,w3,...}。权重向量确定后,可以对证据提供的辨识框架中基本概率赋值进行调整,代入(10)中进行证据合成。 3.2 衡量证据冲突归一化权重 Jousselme证据距离能够在一定程度上衡量证据冲突程度。两组基本信任分配分别为m1、m2,证据的Jousselme证据距离表示为: (16) 其中: (17) 其中:m1,m2分别是基本信任分配m1,m2的矢量形式;|·|为模计算。dBPA∈[0,1],dBPA越大,两证据间的距离越大,接近性程度越小,差异性越大。文[9]通过例子得出,Jousselme证据距离不能完全衡量证据间接近性程度,不能正确衡量两组完全冲突的非类别证据间冲突程度,因此提出修正证据距离,公式如下: (18) 其中: (19) 修正证据距离衡量两组证据的接近性程度,满足以下4个特性: (1)mdBPA(m1,m2)∈[0,1]; (2)mdBPA(m1,m2)=0,当m1=m2; (3)mdBPA(m1,m2)=1,当且仅当 (∪Ai)∩(∪Bj)=φ; (4)由于[m1,m1]+[m2,m2]≤2,mdBPA(m1,m2)≥dBPA(m1,m2)当且仅当m1,m2同时为类别证据时,等号成立。文[9]提出了新的二元组,cfM(m1,m2)=[k,mdBPA],采用基于合取冲突和修正证据距离的二元组。构建基于二元组的二元函数cfm,定量地分析证据冲突程度。二元函数cfm: (20) cfm为衡量证据冲突程度的量,cfm越小,证据冲突证据越小。经过验证cfm能够较好地衡量证据冲突程度。因此可以通过冲突程度,判断权值是否归一化。归一化公式: (21) 4.1 主元DS用于车辆目标识别的方法 DS理论用于多传感器数据融合时,由各传感器获得信息,并由此产生对某些命题的度量,即为证据理论中的证据,并利用这些证据通过构造相应的基本概率分布函数,对所有的命题(包括鉴别框架)赋予一个可信度,构成一个证据体,每个传感器相当于一个证据体,而多传感器数据融合的实质,利用基于主元DS合并规则将各个证据体合并成一个新的证据体,根据决策准则对目标进行分类。主元DS方法用于多传感器识别系统数据融合方法,如图1。 图1 主元DS方法用于多传感器识别系统 4.2 主元DS融合方法的目标识别的决策准则 由图1可知,主元DS融合规则融合各个传感器测得数据,得到合成后的基本可信度,如何得到最后的决策结果?在目标识别中,本文给出以下目标分类决策规则。 规则1:目标类别应具有最大的可信度; 规则2:目标类别的可信度值与其它类别的可信度值的差必须大于某一阈值; 规则3:不确定性区间长度必须小于某一阈值; 规则4:目标类别的可信度值必须大于不确定性区间长度。 为了验证改进证据理论在车辆识别数据融合应用中的有效性。以文[10]车型识别为例,对DS证据规则、Yager方法、文[1]方法以及本文的改进方法进行比较,分别求出各种方法对车型的识别率。 本次实验采用五个传感器对车型进行识别,柴油机汽车、汽油机汽车和重型汽车分别在水泥路上行驶,同时有干扰存在,有5个传感器置于不同的位置进行识别,其中有三只地振动传感器,两只声传感器,将传感器测得数据进行处理,利用文[11]中小波变换得到特征向量,得到的特征向量构造基本置信函数[12],这样使得通过传感器测得的数据进行证据化,获得相互独立的识别证据,应用各种融合方法合成证据,以期得到准确可靠的识别结果。本例中证据理论识别框架:A柴油机汽车,B汽油机汽车,C重型汽车。五个传感器对识别目标的基本概率赋值见表1。 表1 五组证据源基本概率赋值 利用本文改进方法确定五组证据主元见表2。 表2 五组证据主元 单一传感器对目标进行识别,由表1得出,第一组证据:重型汽车识别率高达0.8,即认为目标为重型汽车;第二组证据:汽油机汽车与重型汽车识别率基本相同,都达到了0.4以上,即无法确定目标类型;第三组证据:汽油机汽车识别率为0.5,即认为目标为汽油机汽车。同理,第四组、第五组证据分别认为目标为重型汽车、柴油汽车。五组独立证据对同一目标识别得到结果差别较大,因此单组证据不能对目标进行精确识别。 4种方法分别得到融合结果见表3。为了方便表示,采用i(i=1,2,3)表示wi。 不同四种方法融合结果由表3可以看出,DS融合规则无法有效地解决高度冲突证据;Yager提出的方法,将高度冲突全部分配给了不确定项,不确定度高达到0.929 7,这种情况在实际识别中是不合理的;文献[1]在Yager的基础上改进,虽能克服Yager的不足,但是对于本例中车型识别率只有0.302 46,识别率不高,不确定性信度分配高达0.573 3,融合结果不理想;本文改进的方法考虑到证据的相互关联的特性、各个证据的有效性,是基于主元的合成方法,计算复杂度降低,尤其当证据基元和证据数量都比较大时,这种优势更为明显,并且通过归一化权重,对多组证据进行融合,结果对重型汽车 表3 四种方法融合结果 识别率为0.546 3。经以上数据综合判断基于主元证据理论能有效的解决高度冲突的证据,融合结果优于其他三种方法,不确定性信度分配降到最小化,其值仅为0.028,能够有效地识别出车型,准确率较提高20%。 由于在证据主元的基础上,本文合成方法能有效地减少计算复杂度、合成冲突证据,同时证据相容程度、可信度概念的引入,使之对冲突证据不再盲目地全盘否定,而是根据可信度确定证据权重系数,合理分配冲突证据,这样极大地提高了合成结果的可靠性。从车辆识别实验结果可以看出,新的改进方法能有效地将路面行驶车辆的目标区分为柴油机汽车,汽油机汽车,重型机汽车,3种目标类型,验证了融合识别方法的正确性和可行性,并且合成方法优于其他方法。 [1] 孙 全, 叶秀清, 顾伟康. 一种新的基于证据理论的合成公式[J]. 电子学报, 2000, 28(8): 117-119. [2]SmetsP.Analyzingthecombinationofconflictingbelieffunctions[J].Informationfusion, 2007, 8(4): 387-412. [3]LiuZ,DezertJ,PanQ,etal.Combinationofsourcesofevidencewithdifferentdiscountingfactorsbasedonanewdissimilaritymeasure[J].DecisionSupportSystems, 2011, 52(1): 133-141. [4] 韩德强, 韩崇昭, 邓 勇, 等. 基于证据方差的加权证据组合[J]. 电子学报, 2011, 39(3A): 153-157. [5] 柯小路, 马荔瑶, 李子懿, 等. 证据推理规则的性质研究及方法修正[J]. 信息与控制, 2016, 45(2): 165-170. [6]DempsterAP.Upperandlowerprobabilitiesinducedbyamultivaluedmapping[J].Theannalsofmathematicalstatistics, 1967: 325-339. [7]ShaferG.Amathematicaltheoryofevidence[M].Princeton:Princetonuniversitypress, 1976. [8] 熊彦铭, 杨战平, 屈新芬. 基于模型修正的冲突证据组合新方法[J]. 控制与决策, 2011, 26(6): 883-887. [9] 沈怀荣, 杨 露, 周伟静, 等. 信息融合故障诊断技术[M]. 北京:科学出版社, 2013. [10] 蓝金辉, 马宝华, 蓝 天, 等.D—S证据理论数据融合方法在目标识别中的应用[J]. 清华大学学报: 自然科学版, 2001, 41(2): 53-55. [11] 刘刈文. 基于小波分析和矩特征的车型识别研究[D]. 南京:南京工业大学, 2006. [12] 王 刚. 证据理论及其在图像目标识别中的应用[D]. 南京:西北工业大学, 2002. Vehicle Identification Based on Principal Component Evidence Reasoning Zhao Nan1, Gao Song1, Song Xiaoru1, Ma Bei2 (1.College of Electronic Information Engineering, Xi’an Technological University, Xi’an 710021, China;2.Xi’an Technological University, Xi’an 710021,China) Vehicle recognition has become a hotpot in the researches on intelligent traffic management system. In the vehicle identification, using the combination rule of Dempster-Shafer evidence to fuse the collision information, the irregular results will be occurred. A new calculation method of weight coefficient is discussed in this thesis. In this method, the evidence principal elements for each group can be determined by analyzing the principal component of evidence. Then the evidence compatibility and credibility are obtained. Further, the weight coefficient of evidence can be determined through all above parameters.This thesis puts forwards a measure method for conflict of evidence This method can calculate the conflict value, then normalize weight, modify the evidence source. Further, ER evidence is used to identify the target. In the simulation progress, the example of the recognition of the vehicle type on realistic road can be utilized to compare this method with others. It can be proved that this method is more effective than others on fusing the evidence with high conflict and reducing the computational complexity. The accuracy of target recognition is improved by 20%. evidence theory; principal element; weighting coefficient; collision of evidence; normalization; target recognition 2016-11-29; 2016-12-23。 陕西省自然科学基础研究计划(2014JM2-6093);陕西省工业科技攻关计划项目(2016GY-032);西安工业大学校长基金(XAGDXJJ15014)。 赵 楠(1992-),女,河南许昌人,硕士研究生,主要从事智能控制、多传感器信息融合方向的研究。 高 嵩(1966-),男,陕西西安人,教授,硕士研究生导师,主要从事智能控制、计算机控制、多传感器信息融合、自主控制及复杂网络等方向的研究。 1671-4598(2017)05-0199-04 10.16526/j.cnki.11-4762/tp.2017.05.055 TP232 A4 主元DS数据融合在车辆识别中应用

5 算法验证及分析


6 结论
猜你喜欢
心理学报(2022年5期)2022-05-16
当代陕西(2020年17期)2020-10-28
初中生学习指导·提升版(2020年11期)2020-09-10
人大建设(2018年5期)2018-08-16
证券市场红周刊(2018年3期)2018-05-14
文理导航(2018年2期)2018-01-22
数学学习与研究(2016年21期)2017-05-08
幼儿智力世界(2016年6期)2016-05-14
祝你幸福·知心(2016年3期)2016-03-29
小雪花·初中高分作文(2015年10期)2015-10-24
