
基于路况预测的PHEV能量管理策略
2017-05-24 14:45马灵灵付主木李东卫
计算机测量与控制 2017年5期
马灵灵,付主木,李东卫
(河南科技大学 信息工程学院,河南 洛阳 471023)
基于路况预测的PHEV能量管理策略
马灵灵,付主木,李东卫
(河南科技大学 信息工程学院,河南 洛阳 471023)
为了提高插电式混合动力汽车(plug-inhybridelectricvehicle,PHEV)的燃油经济性,减少排放,提出了基于路况预测的PHEV能量管理策略;首先,建立PHEV系统结构并在此基础上依据动力电池SOC(Stateofcharge)变化规律定义了3种PHEV基本工作模式;然后,设计路况识别模糊控制器对当前行驶路况进行识别并预测;最后,根据预测的路况类型结合合理规划的动力电池SOC的曲线约束,制定PHEV能量管理策略;仿真结果表明,该能量管理策略能够较好的使动力电池SOC保持在设定的参考轨迹附近,提高燃油经济性,减少排放。
插电式混合动力汽车;行驶路况识别;SOC参考轨迹;能量管理
0 引言
插电式混合动力汽车(plug-in hybrid electric vehicle, PHEV)结合了传统内燃机汽车和纯电动汽车的优点,既可以使用外部电网充电,又可以高效地利用燃油能量,实现更长的纯电动续驶里程,减少汽车废气排放,成为国内外新能源汽车研发的热点[1-3]。制定合理的PHEV能量管理策略,有效控制汽车的工作模式,提高整车燃油经济性,减少排放,是汽车企业和研究机构研究的核心技术之一。
汽车的行驶路况是PHEV能量管理策略制定的必要条件,行驶路况的不同直接影响控制策略的发挥,进而影响整车的燃油经济性和排放性[4-5]。因此,对汽车行驶路况进行分类,设计与各路况相应的能量管理策略,对提高汽车燃油经济性、降低尾气排放意义重大。目前结合汽车行驶路况识别的能量管理策略方面的研究很多,林歆悠等[6]选取了四种典型的城市循环路况,采用学习向量量化神经网络模型的方法,对各路况的特征参数进行训练学习,从而实现对行驶路况的识别。彭志远[7]选取20个典型循环路况,对各路况下能量管理策略中的关键参数,利用粒子群算法进行优化,并根据优化结果建立数据库。周楠等[8]采用简化的神经网络对实时车速进行采集分析,运行一段时间后,自动寻找与之相近的标准循环工况,控制参数也相应转化为标准工况下已优化参数。现有的结合行驶路况识别的能量管理策略,对汽车整个行驶里程的全局最优性鲜有考虑。
基于此,本文根据车速与时间关系,提取路况信息特征参数,设计路况识别模糊控制器,结合全局最优的动力电池SOC(State of charge)参考曲线及预测得到的路况类型制定能量管理策略,并进行了仿真验证。
1 PHEV结构及工作模式
1.1 PHEV系统结构
插电式混合动力汽车(PHEV)的系统结构决定着车辆工作模式和整车的节能减排能力,也是PHEV系统参数匹配、能量管理策略开发和优化的前提。下图1为本文中用到的PHEV车型的系统结构。
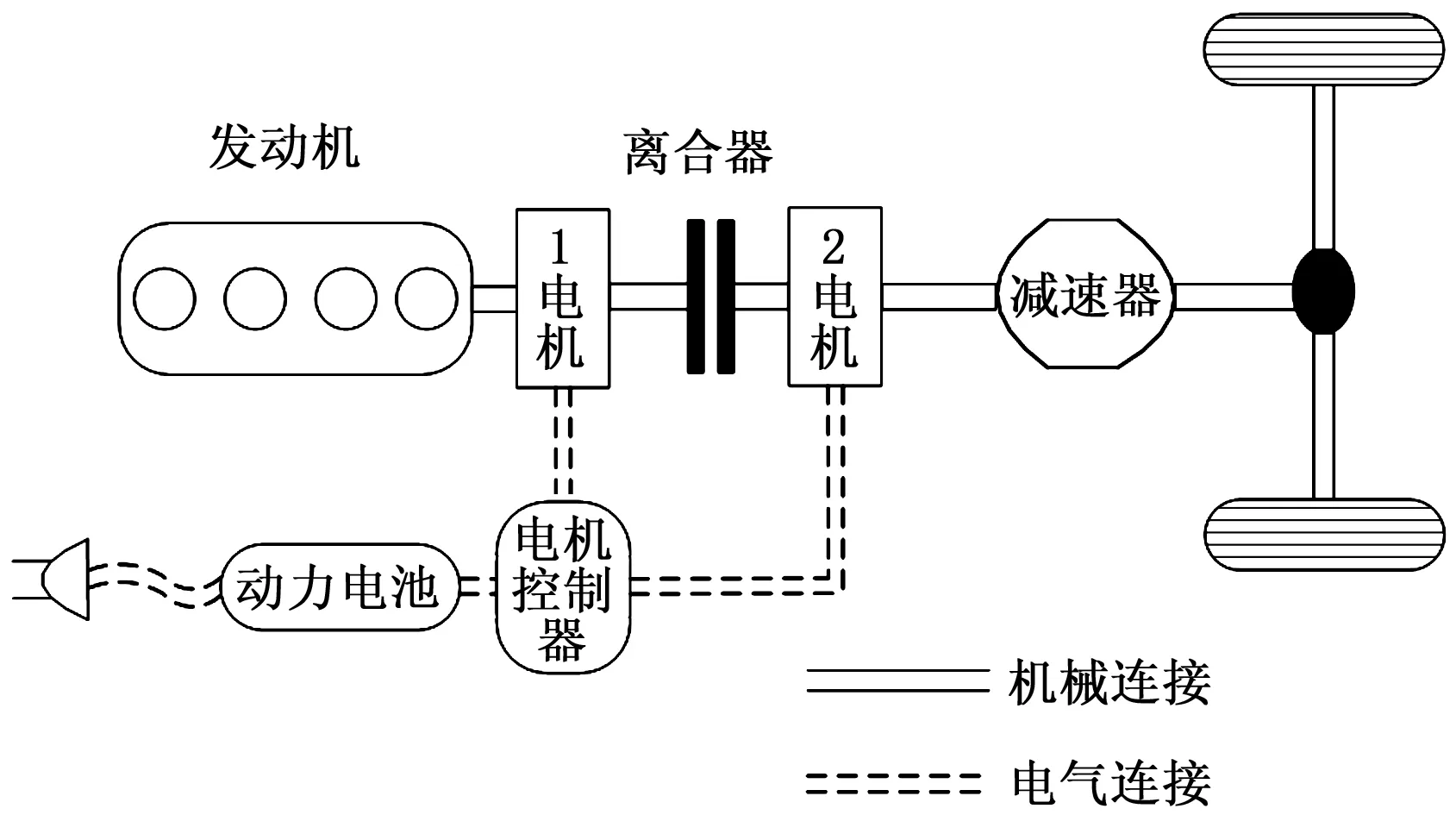
图1 PHEV车型系统结构
该插电式混合动力系统采用单轴混联式动力结构,主要由发动机、ISG电机、离合器、主驱动电机、动力电池和主减速器组成,该结构的主要特点是:ISG电机和发动机是连在一起的,发动机的驱动转矩通过离合器与主驱动电机的驱动转矩耦合。ISG电机不直接驱动车辆,主要用于发动机的快速启动和发电。通过离合器的接合与分离实现串并联结构的切换,从而更好地发挥混合动力系统节能减排的潜力。利用单轴实现驱动转矩的耦合,不需要复杂的动力耦合装置,结构简单、容易控制。
1.2 PHEV工作模式分析
依据动力电池SOC变化规律,将PHEV基本运行模式定义为以下3种模式:纯电动驱动模式(Pure Electric Driving, PED)、混合驱动电量消耗模式(Hybrid Driving Charge Depleting, HDCD)和混合驱动电量维持模式(Hybrid Driving Charge Sustaining, HDCS)。
如图2所示,PED模式和HDCD模式下动力电池SOC都呈下降趋势,只是HDCD模式下动力电池SOC下降比PED模式下慢。HDCS模式下,动力电池SOC变化轨迹则是在狭小区域内上下波动,这与传统混合动力汽车的控制策略效果相似,电机和发动机联合工作,使动力电池SOC保持在某一设定水平。
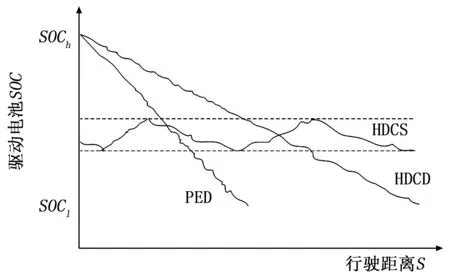
图2 三种运行模式的SOC变化轨迹对比
1.2.1 纯电动模式
在纯电动模式下,电能作为唯一的能量源驱动车辆行驶。发动机和ISG电机不工作,离合器处于分离状态,主驱动电机提供全部需求动力。转矩分配策略如下式:
(1)
式中,Te为发动机转矩,TISG为ISG电机转矩,Tm为主驱动电机转矩,Treq为整车的需求功率。
1.2.2 混合驱动电量消耗模式
在混合驱动电量消耗模式下,ISG电机不工作,由发动机和动力电池共同提供整车的动力需求。其中,主驱动电机提供车辆的主要驱动转矩,同时依据动力电池SOC状态进行再生制动,将再生制动过程中产生的电能回充给动力电池。发动机作为动力辅助单元工作在高效区,来配合主驱动电机为车辆提供驱动转矩。
离合器状态用Sclu表示,Sclu=0表示离合器分离,Sclu=1表示离合器结合;发动机工作状态用Se表示,Se=0表示发动机关闭,Se=1表示发动机启动。
(2)
式中,nclu_eng_HDCD为HDCD模式下离合器的结合转速,Te_opt_min为发动机高效工作区输出转矩的下限。电量消耗模式下,转矩分配策略如式(3)所示:
(3)
式中,Te_opt_max为发动机在高效工作区时输出转矩的上限。
1.2.3 混合驱动电量维持模式
在电量维持模式下,发动机、ISG电机和主驱动电机三个动力源协同工作驱动车辆行驶。此时,燃油作为车辆唯一的能量源,转矩分配策略与常规混合动力相似。需求动力主要由发动机提供,电机和动力电池组成的电驱动系统,用来平衡功率需求,以提高混合动力系统的工作效率。SOC维持在特定范围内,整体呈水平走势。发动机及离合器状态如式(4)所示:
(4)
式中,nclu_eng_HDCS为HDCD模式下离合器结合转速。
电量维持模式下,系统转矩分配策略如式(5)所示:
(5)
式中,Te_opt是发电工作点对应发动机输出转矩;Te_max和Te_min分别是电量维持模式下发动机预设工作区的上限和下限。
汽车行驶时,根据路况的变化,需要合理地切换运行模式,在保证汽车动力性的前提下,以减少燃油消耗。
2 路况识别模糊控制器设计
2.1 路况分类
忽略天气条件对驾驶路况的影响,根据道路特征情况,把车辆的行驶路况分为3类:城市路况,郊区路况,高速路路况。
(1)城市路况,交通信号灯较多,车辆数目多,交通流量大,车速较低,道路经常出现拥堵情况,车辆频繁起停,怠速时间比大,平均车速较低,最高车速不超过70km/h。(2)郊区路况,道路出现拥挤状况相比城市路况少,道路相对比较通畅,怠速时间比小,车辆通常以中速行驶。(3)高速路况,偶尔会因突发事件导致拥堵,但怠速时间比很小,平均车速较高,最低车速不得低于60km/h,最高车速不得超过120km/h。
2.2 特征参数提取
从时间窗口ΔT内的速度曲线中提取有效的特征参数。特征参数应尽可能少,要能够快速,精确地反应出路况类型。结合实际交通规则,选取平均车速,最大车速和怠速百分比作为路况识别的特征参数。
文中利用当前时刻前ΔT的速度曲线预测当前时刻后Δt的路况类型。路况预测的准确度与时间窗口ΔT和时间间隔Δt的取值有很大关系。ΔT选择太小,则可用的历史路况信息少,太大则会出现多余的历史路况信息导致计算量变大。Δt选择太小,则需要频繁地运行路况预测程序,太大则路况预测的灵敏度及准确性受到影响[9]。经过反复测试,本文选用ΔT=120和Δt=3。特征参数的具体计算公式如式(6)所示:
(6)
式中,VM为最大速度,ν为平均速度,r为怠速时间比,k为总采集次数,ν(i)为每一个时间间隔内的平均速度,t(i)为速度为0的时间。
2.3 路况识别模糊控制器设计
特征参数与行驶路况之间存在复杂的联系,模糊控制具有非常高的自适应性和鲁棒性,因此选用模糊控制进行模式识别。制定的模糊控制算法包括三个输入量、一个输出量。平均车速ν、怠速时间比r、最大速度VM作为输入量,路况类型为输出量。
路况识别模糊控制器总体思路如图3所示。
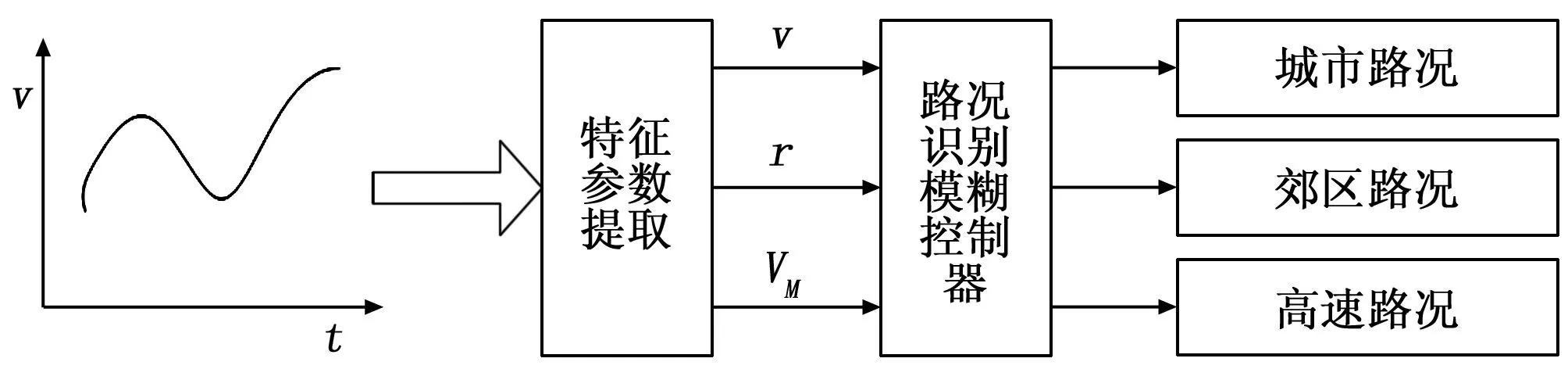
图3 路况识别模糊控制器
1)设定输入特征参数的隶属度函数,平均车速、怠速时间比、最大速度三个特征参数的隶属度函数如图4所示,三个输入量分别有“S”、“M”、“B”三个模糊子集,分别代表小、中、大。
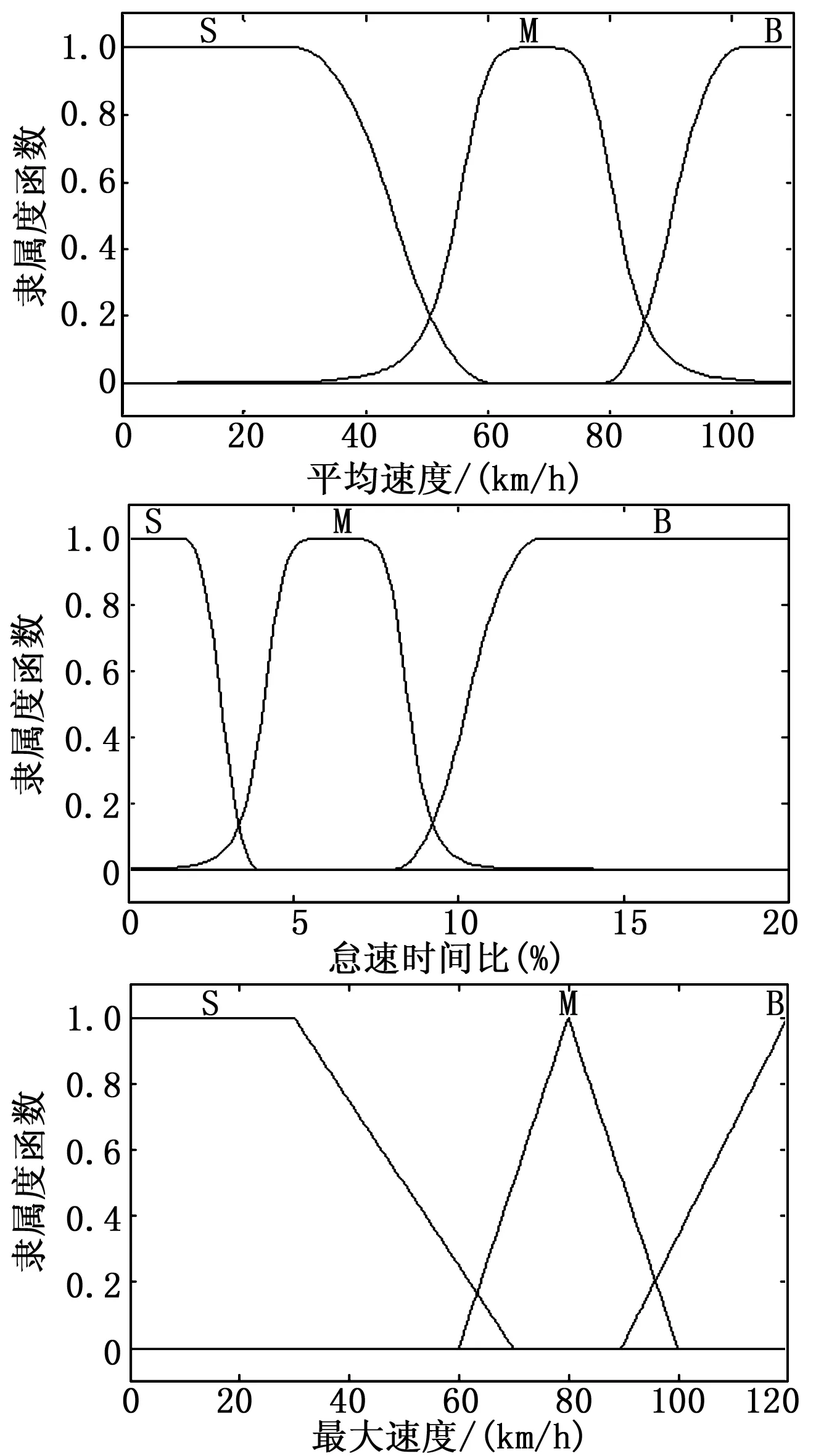
图4 平均车速、怠速时间比、最大速度的隶属度函数
2)设定路况识别的模糊推理规则如表1所示。输出量为“1”、“2”、“3”,分别代表城市路况,郊区路况、高速路况。
3)输出路况类型的隶属度函数,路况识别模糊控制器的输出结果为三种路况,定义区间{0,1}为城市路况,区间{1,2}为郊区路况,区间{2,3}为高速路况。经适当模糊化处理后得到输出结果的隶属度函数如图5所示。
3 基于路况预测的PHEV能量管理策略设计
行驶路况对车辆的燃油经济性影响很大,同时动力电池中来自电网的电能应用方式也会对燃油经济性有一定影响。为了充分发挥PHEV电池容量大的优势,合理使用动力电池的外充电能,文中提出根据不同的路况类型,以规划的动力电池SOC曲线为约束,制定PHEV能量管理策略,以期达到全局最优的燃油经济性。
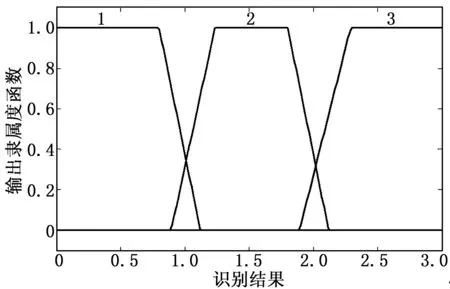
图5 识别结果隶属度函数
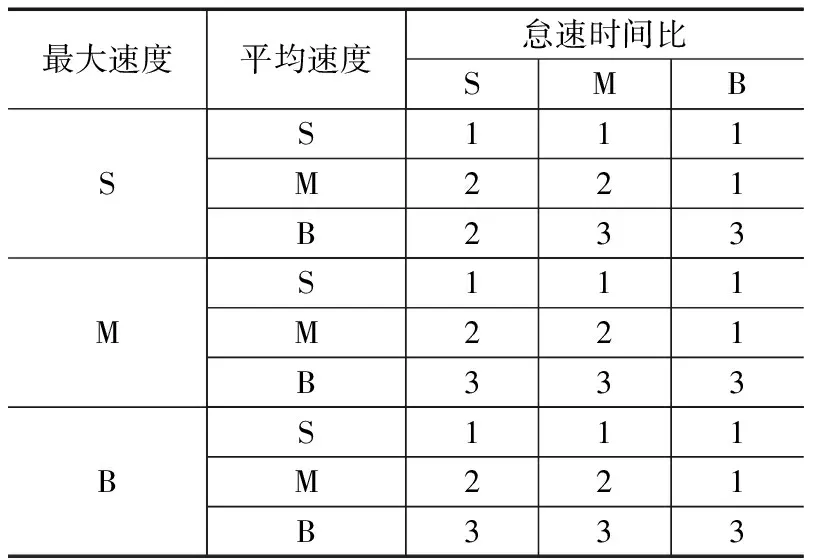
最大速度平均速度怠速时间比SMBSS111M221B233MS111M221B333BS111M221B333
3.1 动力电池SOC轨迹规划
如何合理的规划动力电池中电量的使用,关系到PHEV能量管理的全局最优性,所以动力电池SOC轨迹的合理规划很重要。在离线情况下,对不同的行驶里程、不同的行驶路况采用动态规划算法,得到全局最优的动力电池SOC变化轨迹。从结果中发现,动力电池SOC的下降趋势相同,大致呈线性衰减,即随着行驶里程的增加,动力电池SOC从最大值近似均匀的减小到最小限值。
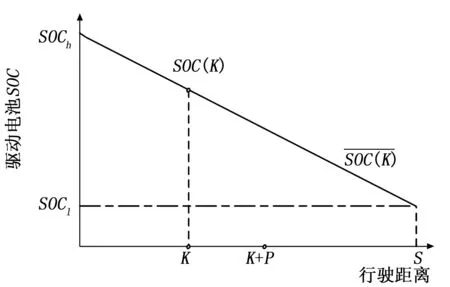
图6 动力电池SOC的计算
为了便于实际应用,把最优的SOC变化轨迹的线性拟合线,作为SOC参考曲线。
SOC(K)=λ(K-S)+SOCl
(7)
式中,SOC(K)是行驶距离为K时的SOC值,λ为动力电池SOC理论斜率,SOCl为行程终点时动力电池SOC值。
3.2PHEV能量管理策略
根据预测得到的路况类型,结合合理规划的SOC参考曲线,制定PHEV能量管理策略。
图7中,ΔSOC是当前SOC值与理论SOC值的变化量,将理论SOC值与实际SOC的最大值设定为d和h,具体计算如式(9)所示:
ΔSOC=SOCt-SOCp
(9)
式中,SOCt是理论SOC值,SOCp是实际SOC值,d和h都是设定的ΔSOC限值,其中h>d。
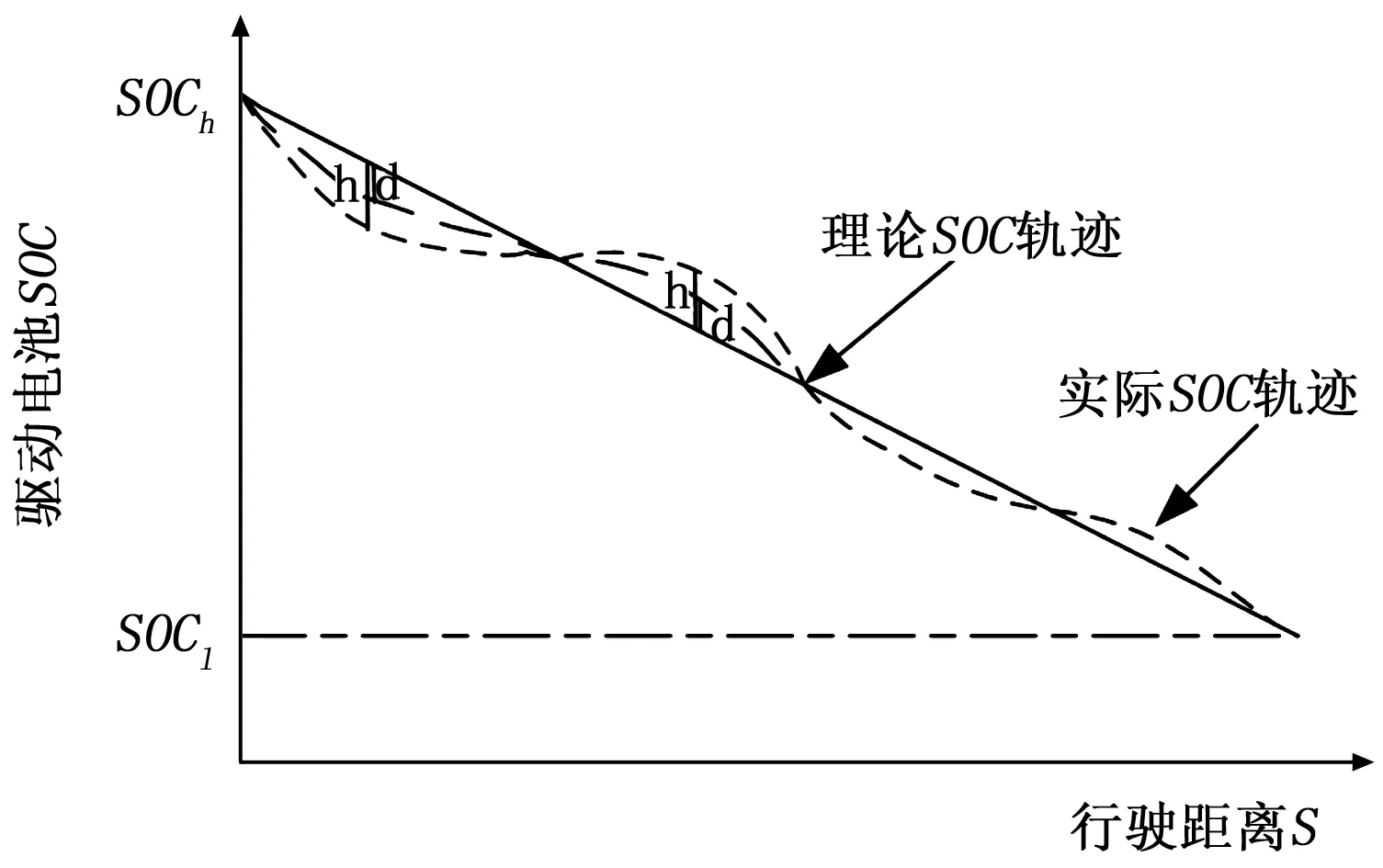
图7 理论SOC参考轨迹
在城市路况下,交通流量大,道路经常出现拥堵,怠速时间比较大,车辆的怠速损失和以制动形式消耗的车辆动能相当高,发动机工作效率不高,且尾气污染严重,纯电动行驶可以降低城市的污染程度。因此,纯电动驱动模式是最理想的工作模式。
通过路况预测得知前方是城市路况时,切换到纯电驱动模式。如果-h<ΔSOC<-d,则切换到混合驱动电量消耗模式。如果ΔSOC≤-h,则切换到混合驱动电量维持模式。如框图8所示。
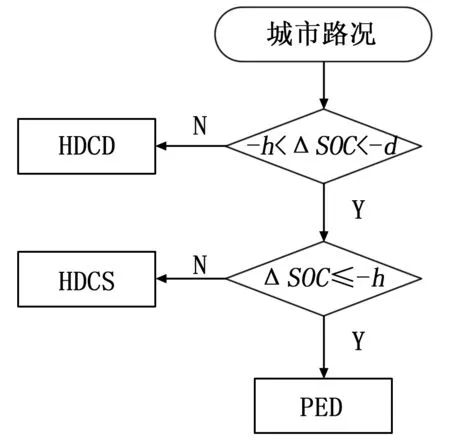
图8 城市路况下能量管理策略流程图
在郊区路况下,怠速时间比少,道路相对比较通畅,车辆通常以中速行驶,这种路况下混合驱动电量消耗模式比较适宜。发动机作为动力辅助单元工作在高效区来配合主驱动电机为车辆提供驱动转矩,车辆运行过程中动力电池
SOC
整体呈下降态势,但下降速度较纯电动模式下慢。
通过路况预测得知当前路况是郊区路况时,切换到混合驱动电量消耗模式,如果ΔSOC≥h,则切换到纯电动驱动模式。如果ΔSOC≤-h,则切换到混合驱动电量维持模式。如框图9所示。
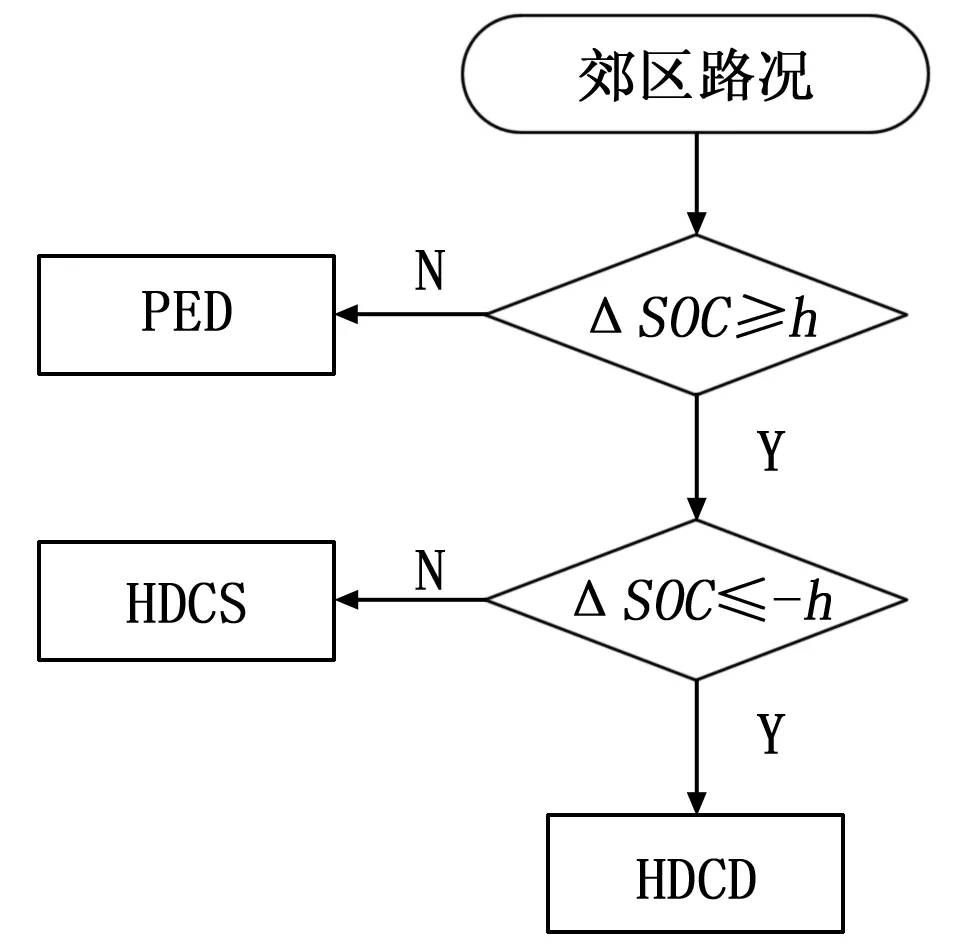
图9 郊区路况下能量管理策略流程图
在高速路况下,怠速时间比很小,平均车速较大,车辆的换挡频率和制动频率最低,因而怠速损失和以制动形式消耗的车辆动能很小。这种路况下混合驱动电量维持模式最为合适。车辆的动力需求主要由发动机提供,电机和动力电池成的电驱动系统,作为功率平衡器对车辆功率需求,进行削峰填谷,以提高混合动力系统的工作效率。发动机效率较高,电池电量不足时可以为电池充电。
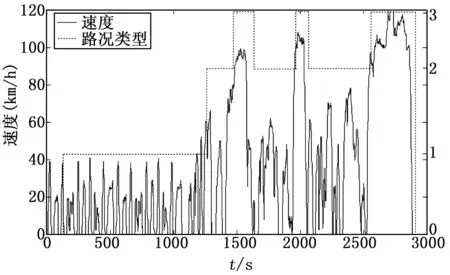
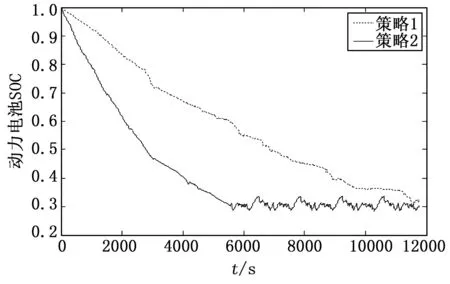
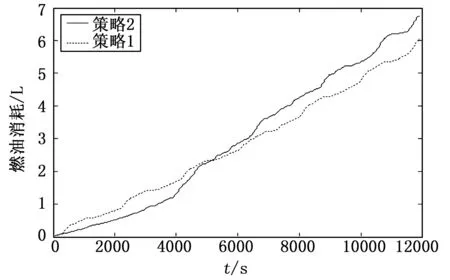
通过路况预测得知当前路况是高速路况时,切换到混合驱动电量维持模式。如果d<ΔSOC 图10 高速路况下能量管理策略流程图 在ADVISOR仿真平台中搭建后向仿真模型,结合在Matlab/simulink环境下搭建的控制策略,进行仿真分析验证基于路况预测的PHEV能量管理策略的可行性。 为了验证路况识别模糊控制器的可行性,随机选用仿真软件中的工况组合进行仿真。从识别结果图11可以看出,前120s由于是采集路况没有识别结果,随后根据特征参数,路况识别模糊控制器识别路况结果为1城市路况,随着速度的变化,识别结果分别为2郊区路况和3高速路况。结果表明制定的路况识别模糊控制器能够很好的识别路况,这为测试PHEV能量管理策略做好了基础。 图11 路况识别结果图 设置动力电池SOC初始值为1,最低门限值为0.25,将基于路况预测的PHEV能量管理策略1和基于规则的控制策略2在相同的工况下对比测试,仿真结果如图12所示,策略2在电池电量充足的情况下主要使用电能,动力电池SOC下降较快,电量消耗达到最低门限值后开始进入电量维持阶段。策略1动力电池SOC在整个行驶里程中均匀下降,在行程终点接近最低门限值。策略1较策略2,在整个行驶里程中合理使用了动力电池的电能,有效的提高了整车的燃油经济性。图13为两种策略下燃油消耗对比图,策略2在开始阶段燃油消耗较低,再进入电量维持阶段后,燃油消耗稳步上升。而策略1,在整个行驶里程中,燃油消耗平稳增加。策略2的整体燃油消耗较策略1低。由于策略2没有考虑路况的变化及时改变工作模式,其节能效果较基于路况识别的能量管理策略差。 图12 两种策略下动力电池SOC变化对比图 图13 两种策略下燃油消耗对比图 (1)在行驶路况识别的基础上,提出了路况预测的方法。提取过去至当前时间窗口ΔT内的特征参数,作为路况识别模糊控制器的输入,输出的路况类型作为下一个时间间隔Δt的路况类型。 (2)在离线下对不同行驶里程、不同行驶路况采用动态规划全局优化算法,得到全局最优的动力电池SOC变化轨迹。把最优的SOC变化轨迹线性拟合线作为SOC参考曲线。 (3)依据SOC参考曲线,结合预测得到的路况类型,制定基于路况预测的PHEV能量管理策略。仿真对比分析表明,相对于基于规则的控制策略,基于路况预测的PHEV能量管理策略在满足汽车动力性的前提下,可以有效的减少整车的燃油消耗,提高整车的燃油经济性,验证了所制定策略的可行性和有效性。 (4)本文制定的能量管理策略依据的是离线下最优的SOC变化轨迹线性拟合线,并不是实际路况的SOC变化轨迹。为进一步提高整车的燃油经济性,如何制定更接近实际路况的SOC变化曲线,将是后续研究工作的重点。 [1] 秦大同, 赵新庆, 苏 岭, 等. 插电式混合动力汽车变参数能量管理策略[J]. 中国公路学报, 2015, 28(2): 112-118. [2]StephanCH,SullivanJ.Environmentalandenergyimplicationsofplug-inhybrid-electricvehicles[J].EnvironmentalScience&Technology, 2008, 42(4): 1185-1190. [3] 程 飞, 赵 韩, 尹安东, 等. 插电式并联混合动力汽车模糊控制策略设计与仿真[J]. 合肥工业大学学报: 自然科学版, 2015, 38(9): 1159-1164. [4] 刘文杰. 混联型混合动力汽车控制策略优化研究[D]. 重庆: 重庆大学, 2007. [5]ZhangM,YangY,MiCC.Analyticalapproachforthepowermanagementofblended-modeplug-inhybridelectricvehicles[J].IEEETransactionsonVehicularTechnology, 2012, 61(4): 1554-1566. [6] 林歆悠, 孙冬野. 基于工况识别的混联式混合动力客车控制策略研究[J]. 中国机械工程, 2012, 23(7): 869-874. [7] 彭志远. 单电机ISG型AMT重度混合动力汽车能量管理策略研究[D]. 重庆: 重庆大学, 2012. [8] 周 楠, 王庆年, 曾小华. 基于工况识别的HEV自适应能量管理算法[J]. 湖南大学学报 (自然科学版), 2009, 36(9): 37-41. [9] 周之光. 行驶工况自适应的PHEV能量在线实时优化控制研究[D]. 长沙: 湖南大学, 2012. Energy Management Strategy of PHEV Based on Traffic Prediction Ma Lingling,Fu Zhumu,Li Dongwei (Information Engineering College, Henan University of Science and Technology,Luoyang 471023, China) In order to improve the fuel economy and reduce emissions of plug-in hybrid electric vehicles, a PHEV energy management strategy based on road condition prediction is proposed. Firstly, the PHEV system structure is established and three kinds of PHEV basic working modes are defined based on the SOC(State of charge) change trajectories of the battery packs. Then, the traffic condition fuzzy controller is designed to recognize the current road condition. Finally, according to the type of traffic prediction in combination with the curve of the reasonable planning of power battery SOC constraints, the energy management strategy of PHEV is developed. The simulation results show that the energy management strategy can make the SOC of the power battery keep fluctuating around the set reference trajectory to improve the fuel economy and reduce the emission. plug-in hybrid electric vehicle; traveling road condition identification; SOC reference trajectory; energy management strategy 2016-12-08; 2017-01-05。 国家自然科学基金(61473115);河南省科技创新人才杰出青年计划(144100510004)。 马灵灵(1988-),女,河南项城人,硕士研究生,主要从事混合动力汽车控制算法方向的研究。 付主木(1974-),男,湖北省仙桃市人,教授,博士,主要从事混合动力汽车的建模和控制算法方向的研究。 1671-4598(2017)05-0207-05DOI:10.16526/j.cnki.11-4762/tp TP A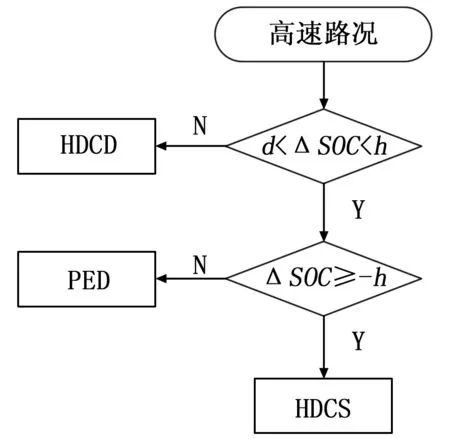
4 仿真验证分析
5 结论
猜你喜欢
消费电子(2022年7期)2022-10-31
军事文摘(2022年16期)2022-08-24
煤气与热力(2021年9期)2021-11-06
软件(2018年1期)2018-12-21
记者摇篮(2018年7期)2018-10-30
记者摇篮(2018年7期)2018-10-30
消费导刊(2018年10期)2018-08-20
汽车与新动力(2018年2期)2018-05-09
三联生活周刊(2016年22期)2016-05-27
客户世界(2013年5期)2013-08-05
