
改进的CS-UKF加速度方差自适应跟踪算法
2017-05-24 14:45崔彦凯
计算机测量与控制 2017年5期
崔彦凯
(中国空空导弹研究院,河南 洛阳 471000)
改进的CS-UKF加速度方差自适应跟踪算法
崔彦凯
(中国空空导弹研究院,河南 洛阳 471000)
针对基于当前统计模型的状态噪声协方差阵中的加速度方差调整方法对一般机动目标、非机动目标跟踪精度差的问题,研究其改进方法;在建立机动目标当前统计模型离散状态方程和雷达导引头离散观测方程的基础上;利用雷达导引头测量信息和位置预测值之间的扰动对加速度方差进行调整,提出了改进的加速度方差自适应调整无迹卡尔曼滤波跟踪算法;数字仿真验证了该算法对非机动目标、一般机动目标以及高机动目标均具有良好的跟踪效果。
当前统计模型;无迹卡尔曼滤波;雷达导引头;自适应;跟踪
0 引言
对机动目标建立准确的运动模型是进行滤波的前提和基础[1]。目前,常用的运动模型有匀速模型、匀加速模型、Singer 模型[2]、“当前”统计模型[3]、Jerk模型[4-5]等。其中,当前统计模型是目前应用最为广泛的实用模型之一,它是由我国学者周宏仁教授于1983年提出的。当前统计模型假设机动目标的当前加速度为修正的瑞利分布,由于修正瑞利分布本身局限性,该模型无法准确描述弱机动目标和非机动目标的加速度情况,对弱机动目标和非机动目标的跟踪效果较差[6]。
针对机动目标当前统计模型建模及跟踪中存在的问题,很多学者提出了不同的改进措施。文献[7]通过加权一个以残差方差的迹为参数的活化函数,对加速度方差和机动频率进行自适应处理。文献[8]用正态分布来弥补修正瑞利分布的缺陷,同时利用模糊隶属度函数对系统方差做加权调整。文献[9]结合升半正态形模糊分布函数特性,提出一种加速度方差两段函数自适应调整方法。文献[10]提出了采用铃形函数作为模糊隶属函数对模型中加速度极值进行修正的方法。
考虑到雷达导引头测量的非线性跟踪问题,无迹卡尔曼滤波(UKF)算法的计算量与扩展卡尔曼滤波(EKF)算法等同,但精度却高于EKF算法[11],本文选择UKF算法作为非线性滤波算法。利用导引头实时测量信息与位置预测值之间的扰动对加速度方差进行自适应调整,提出了改进的基于当前统计模型的无迹卡尔曼滤波加速度方差自适应跟踪算法。该算法有效提高了对弱机动目标和非机动目标的跟踪精度,且不依赖于最大加速度度初值。
1 CS-UKF滤波算法
1.1 目标运动状态数学模型
当目标正以某一加速度机动时,下一时刻的加速度取值是有限的,且只能在当前加速度的领域内,为此,我国学者周宏仁提出了机动目标当前统计模型。当前统计模型能够更真实地反映目标机动范围和强度的变化,是目前较好的实用模型。假设目标在惯性坐标系OXYZ中运动,当前统计模型离散状态方程为:
X(k+1)=Φ(k+1,k)X(k)+BkU(k)+Γ(k)
(1)



(2)
状态噪声Γ(k)是均值为零的离散时间白噪声序列,即
E[Γ(k)ΓT(k+j)]=0,∀j≠0
(3)
若j=0,则状态噪声协方差阵为:
(4)
式中:
q33=[1-e-2aT]。
1.2 雷达导引头观测数学模型
假设雷达导引头位于惯性坐标系原点,三维条件下的雷达导引头观测模型为:
Y(k)=h[X(k)]+Π(k)
(5)
式中:Y(k)=[r(k)θ(k)φ(k)]T;
r(k)、θ(k)、φ(k)分别为雷达导引头距离、高低角、方位角测量信息。
测量噪声Π(k)是均值为零离散时间白噪声序列,即
E[Π(k)ΠT(k+j)]=0,∀j≠0
(6)
若j=0,则测量噪声协方差矩阵为
(7)
式中:σr、σθ、σφ分别为距离、高低角、方位角测量误差的标准差。
1.3UKF算法
1.3.1 无味变换

(8)

(9)

(10)
λ=α2(n+k)-n
(11)
(12)

1.3.2 算法描述
UKF是通过无味变换使非线性系统方程适用于线性假设条件下的标准卡尔曼滤波体系,而扩展卡尔曼滤波是通过线性化非线性函数实现递推滤波。因此,UKF比扩展卡尔曼滤波能更好地逼近状态方程的非线性特性,估计精度更高[13]。UKF滤波算法描述如下:

2)时间更新。若不考虑有输入作用,由式(11)、式(12)可计算得权值Wi,则有
(13)
(14)
(15)
(16)
(17)
3)测量更新。
(18)
(19)
(20)
(21)
(22)
至此,得到了UKF在k时刻的滤波状态和方差。
1.4 改进的CS_UKF跟踪算法
(23)
根据加速度方差自适应算法,当“当前”加速度为正时:
(24)
当“当前”加速度为负时:
(25)

本文利用雷达导引头实时测量信息和位置预测值之间的扰动计算加速度方差,有效解决了机动目标当前统计模型对一般机动目标、非机动目标跟踪精度差和对最大加速度初值依赖的问题。推导过程如下:
(26)
变换式(26)可得:
(27)
由式(24)或式(25)可知,如果把加速度最大值和加速度预测值之间的差值作为加速度扰动量,加速度扰动量的绝对值与加速度协方差成比例关系。可以利用k-1时刻到k时刻的加速度变化量Δax近似表示当前时刻的加速度扰动量,从而给出一种加速度协方差自适应调整表达式:
(28)
同理可得目标在OY轴、OZ轴的加速度方差自适应调整公式为:
(29)
式中,Nx、Ny、Nz分别为OX轴、OY轴、OZ轴加速度协方差调整比例系数。
式(27)~(29)中的x1,k、x2,k、x3,k可以利用雷达导引头在当前时刻的测量值近似估计得到,即:
(30)
式中:r为k时刻雷达距离测量值;θ为k时刻雷达高低角测量值;φ为k时刻雷达方位角测量值。
2 仿真分析
仿真中,假设雷达导引头位于惯性坐标系原点,雷达导引头距离测量标准差10米,高低角测量标准差0.3度,方位角测量标准差0.3度,采样周期为24毫秒。目标初始飞行状态为[10 000m,10 000m,10 000m,-300m/s,-300m/s,-880m/s,0, 0, 0]。传统的机动目标当前统计模型自适应跟踪算法简称为CS_UKF;改进的机动目标当前统计模型自适应跟踪算法简称为ICS_UKF。仿真情形1:目标无机动飞行。仿真情形2:目标一般机动飞行,目标分别以纵向过载Ny=-1g、法向过载Nz=-1g在YOZ平面内机动飞行。仿真情形3:目标高机动飞行,目标分别以纵向过载Ny=-5g、法向过载Nz=-5g在YOZ平面内机动飞行;在上述测量精度条件下进行100次蒙特卡洛仿真,统计两种算法的均方根误差,两种算法的仿真结果如图1~图3所示。
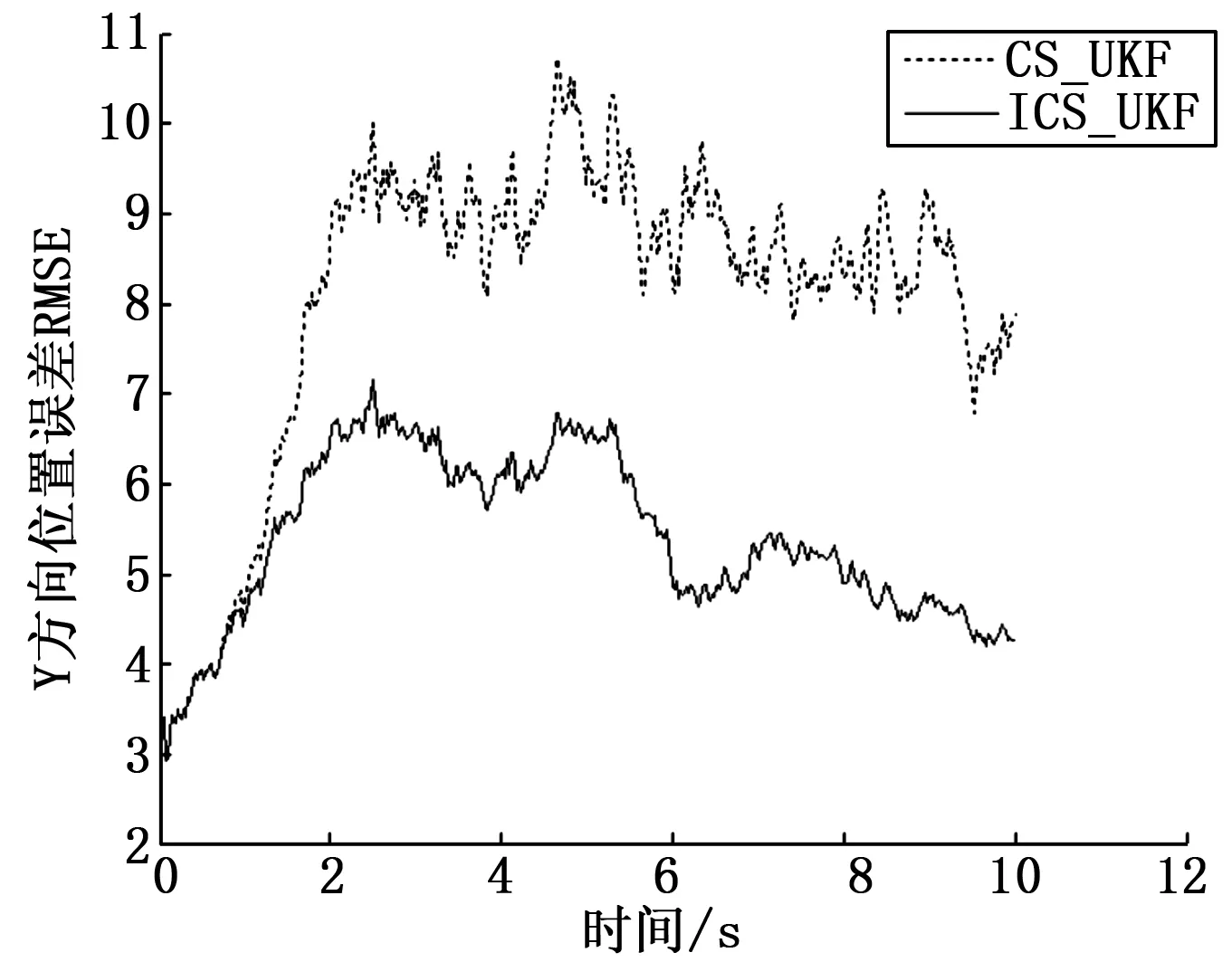
图1 Y方向位置均方根误差统计结果

图2 Y方向位置均方根误差统计结果
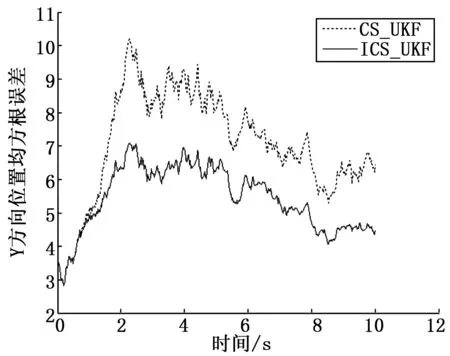
图3 Y方向位置均方根误差统计结果
1)仿真情形1:目标无机动飞行。
2)仿真情形2:目标一般机动飞行。
3)仿真情形3:目标高机动飞行。
由仿真结果可知:改进的机动目标当前统计模型自适应跟踪算法(ICS_UKF)与传统的机动目标当前统计模型自适应跟踪算法(CS_UKF)相比,对于非机动目标、一般机动目标、高机动目标均具有更小的跟踪误差,更高的跟踪精度。
3 结论
对于非机动目标、一般机动目标、高机动目标,改进的机动目标当前统计模型自适应跟踪算法(ICS_UKF)与传统的机动目标当前统计模型自适应跟踪算法(CS_UKF)相比,均具有较好的跟踪性能,计算加速度方差时也不再依赖于最大加速度初值,且基于UKF的滤波算法有效解决了雷达导引头测量的非线性滤波问题;仿真结果也验证了该算法的有效性。
[1] 欧阳超,杨霄鹏,贾航川,等.改进的基于“当前”统计模型自适应滤波算法及其在航迹预测中的应用[J]. 科学技术与工程,2013(26):7656-7661.
[2] Singer R A. Estimating optimal tracking filter performance for manned manervering targets[J]. IEEE Trans on Aerospace and Electronic Systems,1970: 473-483.
[3] Zhou H R,Kumar K S P. A current statistical model and adaptive algorithm for estimating maneuvering targets[J]. AIAA Journal of Guidance,1984; 7(5) : 596-602.
[4] Mehrotra K,Mahapatra P R. A Jerk model for tracking highly maneuvering targets[J]. IEEE Trans on Aerospace and Electonic Systems,1997; 33(4) : 1094-1105.
[5] 雷 明,韩崇昭. 多级修正的高机动Jerk模型研究[J]. 西安交通大学学报,2006; 40(2) : 138-141.
[6] 钱华明,陈 亮,满国晶,等. 基于当前统计模型的机动目标自适应跟踪算法[J]. 系统工程与电子技术,2011(10):2154-2158.
[7] 黄伟平,徐 毓,王杰.基于改进“当前”统计模型的非线性机动目标跟踪算法[J]. 控制理论与应用,2011(12)1723-1728.
[8] 王树亮,阮怀林. 修正的当前统计模型自适应跟踪算法[J]. 电子信息对抗技术,2011.26(1):34-38.
[9] 刘望生,李亚安,崔 琳.基于当前统计模型的机动目标自适应强跟踪算法[J].系统工程与电子技术,2011,33(9):1937-1940.
[10] 钱华明,陈 亮,满国晶,等.基于当前统计模型的机动目标自适应跟踪算法[J].系统工程与电子技术,2011,33(10):2154-2158.
[11] A Romanenko,J Castro. The unscented filter as a alternative to the EKF for nonlinear state estimation:simulation case study[J]. Computers and Chemical Engineering,2004,28:347-355.
[12] JULIER S J,UHLMAN J K.New extension of the Kalman filter to nonlinear systems[J].SPIE Vol.3068,1997.
[13] 朱志宇. 粒子滤波算法及其应用[M]. 北京:科学出版社,2010.
[14] 周宏仁,敬忠良,王培德. 机动目标跟踪[M]. 北京:国防工业出版社, 1991.
[15] 周宏仁.机动目标“当前”统计模型与自适应跟踪算法[J].航空学报,1983,4(1):73-86.
Modified Acceleration Variance Adaptive Tracking Algorithm Of CS_UKF
Cui Yankai
(China Airborne Academy, Luoyang Henan 471000,China)
Acceleration variance adaptive adjustment method of maneuvering target current statistical model has low tracking precision for weak maneuvering target and non maneuvering target. The paper puts forward a modified method. Discrete state equation of maneuvering target current statistical model is founded. Discrete observation equation of radar seeker is also founded. This paper puts forward an improved acceleration variance adaptive adjustment algorithm of unscented kalman filtering(UKF),which uses disturbance between radar seeker observational information and prediction value of position to self-adaptive adjustment acceleration variance.The simulation shows that modified CS_UKF algorithm has better tracking precision for weak maneuvering target, non maneuvering target and high maneuvering target.
current statistical model(CS); unscented kalman filtering(UKF); radar seeker;adaptive; tracking
2017-01-18;
2017-02-27。
河南省自然科学基金(162300410096)。作者简介:崔彦凯(1980-),男,河南省漯河市人,博士,主要从事信号处理技术方向的研究。
1671-4598(2017)05-0215-03
10.16526/j.cnki.11-4762/tp.2017.05.059
V249.1
B
猜你喜欢
中学生数理化(高中版.高考数学)(2021年3期)2021-06-09
舰船电子工程(2019年10期)2019-11-13
兵器装备工程学报(2019年10期)2019-11-08
空天防御(2019年3期)2019-08-23
火力与指挥控制(2019年6期)2019-07-20
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
初中生世界·九年级(2017年10期)2017-11-08
北京航空航天大学学报(2016年9期)2016-11-16
中学生数理化·八年级数学人教版(2016年5期)2016-08-23
