基于控制系统下的燃气轮机超温跳车原因
2017-06-05 15:52陈海庭王玉江
电子技术与软件工程 2017年7期
陈海庭+王玉江
摘 要 海洋石油富岛化肥一期燃气轮机SUVIMAC-II控制系统于1995年投入使用,2008年初改造为TRICONT S3000三冗余控制系统。改造中将燃机伺服控制系统改为冗余控制,改造后转速控制精确稳定,但随着时间推移,转速控制品质逐渐下降,2013年8月出现因控制失调导致超温跳机。本文针对燃机超温跳车进行了分析研究,查找跳车原因,提出解决措施。
【关键词】燃气轮机 控制规律 原因分析 伺服系统
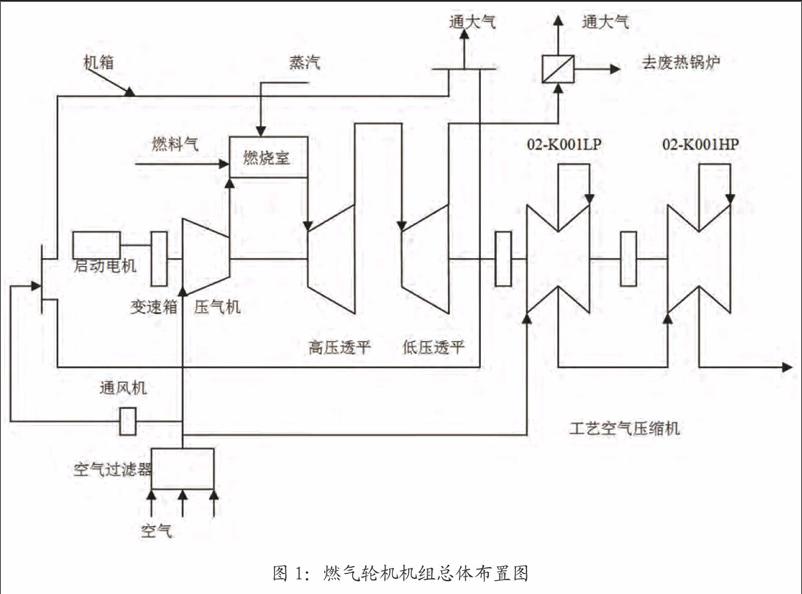
海洋石油富岛化肥一期装置工艺空气压缩机组驱动透平燃气轮机是从意大利新比隆公司引进的工业用燃气轮机,型号为PGT10,该燃机为单燃烧室带蒸汽注入的双轴机组,高压透平有两级动叶,额定转速为10800RPM,驱动燃机本体的17级轴流式压缩机(也称为压气机)压缩燃烧用空气;低压透平为动力透平,也有两级动叶,额定转速为7900RPM,驱动工艺空气压缩机高低压缸.机组布置图见图1。
该燃机配套SUVIMAC-II控制系统于1995年投入使用,连续运行十几年后,由于硬件老化,故障频发,于2008年初改造为TRICON TS3000三冗余控制系统。改造中将燃机伺服控制系统改为冗余控制,改造后转速控制精确稳定,但随着时间推移,转速控制品质逐渐下降,转速波动不断加大,2013年8月出现了因控制失调导致超温跳机的事故。
1 燃机控制规律分析
燃机主调节系统是对燃气轮机工作过程的状态进行控制的调节系统;是对燃气轮机工作过程中某个参数实现恒值闭环自动调节的系统。燃气轮机的主控系统包括:启动燃料控制系统、高压轴加速率控制、低压轴加速率控制、低压轴转速控制、乏气温度控制、手动燃料控制.
2 燃机超温跳车过程描述
2013年8月16日凌晨2点后,系统总C由95.4上涨至98.0,工艺调整合成气压缩机转速以控制前系统压力。燃机跳车前,PC02002在3.535-3.590MPa之间,FC02002在39.9-40.3KNM3/h之间,工艺人员未对燃机进行工艺调整。2013年8月16日凌晨4点35分22秒出现02K001机组跳车信号,合成氨装置维持一段炉运行,后系统做停车处理,辅助锅炉TEG运行方式切至FDF运行方式。
经检查,02机组控制系统的SOE可看出,燃气透平出现伺服故障报警MALM191,2秒后排气温度高报警MALM155,3秒后排气温度高联锁MTRIP113机组跳车。
3 燃机超温跳车原因分析
3.1 燃机超温跳车过程分析
跳车前燃机处于低压轴负荷控制,工艺负荷基本稳定时,燃机低压轴转速上升,04时28分14秒,GCV伺服控制器输出GCV-PO开始下降,4时28分24秒下降至本轮调节的最低值,反馈于28分30秒下降至最低值,反馈滞后6秒钟(正常跟踪应在1秒内),GCV关小使低压轴转速下降。同时,GCV阀门关小导致高压轴转速开始下降,28分17秒时NCV伺服控制器输出NCV-PO开始上升,但直到28分29秒时,反馈才开始上升。即NCV阀门动作(反馈)滞后输出12秒。在这12秒内,高压轴转速从10678rpm下降至10518rpm,下降了160rpm,IGV阀跟着下降了10%,导致入口空气大幅减少,进而引起低压轴转速下降。
在IGV与GCV都关小的双重作用下,低压轴转速迅速下降,28分29秒时滞后的NCV突然大幅开大,能量向高压轴倾斜,加剧了低压轴转速的下降。低压轴转速设定不变的情况下,低压轴转速控制器迅速将GCV开大,由于GCV与NCV阀的动作滞后,导致低压轴转速超调,低压轴转速控制器迅速将GCV关小。
由于GCV动作滞后,高低压轴转速继续升高,低压轴转速控制器继续关小GCV阀门,即GCV伺服控制器输出大幅降低,燃料量急剧下降,高压轴转速大幅降低,NCV又严重滞后,使得高压轴持续大幅降低,从10727一直降至10037下降了690rpm,降幅6.4%,而IGV受77NH控制,降幅是其7倍,下降了46%,从87%降至41%。其结果是入口空气锐减,排气温度在4秒内从493℃上涨至532℃的联锁值而跳车。
3.2 跳车可能原因分析
3.2.1 工况存在大幅调整
根据操作记录及机组运行趋势来看工况稳定,无大幅调整。可排除工况大幅调整原因。
3.2.2 高低压轴转速测量异常
高、低压轴各有2支转速探头,探头转速测量趋势一致,无异常波动,可排除高低压轴转速测量异常原因。
3.2.3 排气温度测量异常
排气温度共有12支热电偶测量,去掉最高、最低值后取平均值。从测量值趋势看,变化一致无明显异常波动,可排除排气温度测量异常原因。
3.2.4 液压油系统压力,过滤器前后差压异常
无相关报警记录,检查液压油系统压力正常,过滤器前后差压正常。可排除液压油系统压力,过滤器前后差压异常原因。
3.2.5 NCV、GCV等阀门卡涩
静态校验各阀门动作顺畅,无明显卡涩现象。可排除NCV、GCV等阀门卡涩原因。
3.2.6 LVDT连接松动
现场对可检查部位进行了检查,连接牢固无松动。可排除LVDT连接松动原因。
3.2.7 VC(伺服系统)卡件问题
在对阀门进行校验时发现GCV静态校验阀位不稳,阀门反馈数据不稳定,超调过大及在50%输出跑零等问题。经过对跳车前机组运行趋势的分析,结合对可能原因的排查,事故原因为GCV与NCV伺服控制卡调节不稳定,控制参数出现漂移,控制失调空气量骤减导致排气温度高触发超温跳车。
4 应对措施
4.1 伺服控制卡参数整定
TS3000的AO卡的两个通道分别输出4-20mA阀位指令给每个VC模块,每个VC模块分别输出电流信号给伺服阀,伺服阀返回LVDT信号给主VC模块,主VC模块输出一路一分二的1~5V阀门反馈信号给从VC模块和TS3000的AI卡,最后HMI从TS3000中读出阀位。其中TS3000与HMI之间是通过通讯协议来交互,不会出现数据偏差问题。而伺服阀的LVDT信号与VC模块的输出阀位若存在偏差,会直接导致阀门控制波动,而从现象来看控制平稳没有波动,也排除了VC模块与伺服阀之间的信号问题。
跳车后在厂家技术人员指导下,对GCV、NCV两个阀门伺服控制卡参数进行整定,静态调试阀门动作滞后时间缩小,开车后GCV、NCV控制稳定,高低压轴转速控制优于停车之前。
在2013年底大修中,对所有伺服控制卡参数进行重新整定。将GCV伺服控制卡主卡更换,并进行参数调整及校验,重新调校GCV、NCV、IGV、SRV两个伺服控制阀门,根据需要重新调整伺服控制卡零点、满度及PI参数。调试后静态调试阀门跟踪迅速,控制精确,阀門精度达到1级,能够很好地满足生产需要。
5 结束语
燃机超温跳车原因为为GCV与NCV伺服控制卡调节不稳定,控制参数出现漂移,控制失调所致。重新调校伺服控制系统开车后,伺服阀门控制精准,高低压轴转速控制稳定,大大提高了系统运行的稳定性,可靠性,为装置的稳定可靠及长周期运行打下了坚实的基础。
作者简介
陈海庭(1972-),男,助理工程师,技师。目前在中海石油化学股份有限公司海南基地电仪部从事仪表运行维护工作。
王玉江(1983-),男,工程师,工程硕士。目前在中海石油化学股份有限公司海南基地化肥一部从事大机组仪表技术管理工作。
作者单位
中海油化学股份有限公司 海南省东方市 572600
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
石油商技(2021年1期)2021-03-29
测控技术(2018年12期)2018-11-25
制造技术与机床(2017年3期)2017-06-23
北京航空航天大学学报(2016年4期)2016-02-27
弹箭与制导学报(2015年1期)2015-03-11
燃气轮机技术(2014年4期)2014-04-16
燃气轮机技术(2014年4期)2014-04-16
燃气轮机技术(2014年4期)2014-04-16
燃气轮机技术(2014年4期)2014-04-16