医疗服务机器人设计与展望
2017-06-15 16:01方朋朋管旭辰董锴文胡凯
科学家 2017年6期
方朋朋+管旭辰+董锴文+胡凯
摘 要 随着科学与技术的不断发展,机器人研究的不断深入与创新,应用于医疗服务事业的机器人也开始不断地增加。医疗服务机器人的出现减轻了医务人员的压力,也为医疗服务事业的发展起到推进作用。促进了医疗卫生事业不断向前发展。为了实现机器人送药、查房以及适应复杂地形等功能,采用了轮式、机械手等结构,已完成规定的任务。
关键词 医疗服务;机器人;发展
中图分类号 TP242 文献标识码 A 文章编号 2095-6363(2017)06-0027-02
目前,隨着世界机器人技术的不断发展,应用于医疗事业的机器人也在不断地发展与创新,医疗服务机器人实现的功能也逐渐增多,例如机器人查房、机器人手术、机器人转运伤员等各种功能。同时这些机器人内部嵌入各种芯片,对各种环境都有很强的适应能力。为医务人员减轻了负担。我国的医疗服务机器人的发展相对落后一点,技术也并不像欧美那样成熟,但是随着科技的进步以及国内对医疗服务的重视程度,医疗服务机器人正在不断发展和壮大,相信不久之后,我国的医疗服务随着医疗服务机器人的技术的成熟与发展将会更加完善。
根据实际情况和我国的医疗服务情景,该机器人是一款能够适应较复杂地形,自主进行查房和代替护士送药,并且能够说一些作为护士对病人应该说的话语的智能机器人。
1 医疗服务机器人总体结构设计流程框图
此医疗服务机器人采用主控芯片为STM32F10x芯片进行编程,结合超声波测距、灰度传感器模块、触控模块、L298N芯片以及以丝杆为机械手臂来实现查房和送药等功能,同时,通过喇叭来与病人进行交流。如图1所示。
2 医疗服务机器人的结构介绍
2.1 医疗服务机器人机械手臂的运行
该机器人以丝杆来代替人体臂膀,可以进行精确的升降,从而确保能够达到预定的位置。机械手通过L298N芯片来驱动直流电机的转动,可以使机械手类似人类双手一样能进行张合,从而实现药品的抓取和放置
丝杠的驱动则是通过程序来进行控制,通过编程以及超声波测距可以较精确地把握升降高度,以便于更好地去服务,更准确地定位。在超声波测得距离与设定的距离一致时机器人便会停止前进,开始通过丝杆带动机械手来抓取物品,等完成后,便会返回进行送物品。
2.2 语音模块
该模块主要利用喇叭、AD芯片以及DA芯片实现模拟量与输入量的转换,同时通过语音识别,将外界的语音输入芯片当中进行识别和分析,然后将之前设置好的语音通过喇叭播放出来,以达到与病人对话的效果。
2.3 灰度模块及运动
此模块是基于灰度传感器的工作原理和轮式运动的优势,利用灰度传感器将外界识别的灰度信息传入芯片当中,从而控制4个底部的滚轮的运动,实现寻迹运动,以达到精确定位的功能。适应在规定区域按照规定的轨迹运行环境。
2.4 触控模块
在设计医疗服务机器人的时候考虑到机器人会随时触碰到一些障碍,为了能够在触碰障碍之后可以立即避开,在机器人的底座四周安装了以触控开关为主的触控模块,当机器人触碰到障碍时,就会碰到触控开关,产生电平的变化,从而使芯片发送转移指令,使得机器人可以成功避开障碍。
3 医疗服务机器人主要芯片介绍
3.1 STM32芯片
该医疗服务机器人的主控芯片采用的是基于ARM的STM32芯片,其性能高、成本低以及功耗低,属于32位的Cortex-M3处理器,有可嵌套的向量中断控制器和60个可屏蔽中断且有16个可编程优先级[ 1 ],更加适用于程序的编写以及快速处理指令。而且由于目前工业上采用的实时收发系统体积比较大,对于超声波测距来说不允许体积很大[ 2 ],因此STM32F10x芯片是比较好的选择,适合嵌入医疗服务机器人内部,也可以减轻机器人本身的重量。
此外,STM32F10x采用C语言编程,让程序更容易编写和理解,也符合现今用从C语言编程的习惯。
3.2 L298N电机驱动芯片
医疗服务机器人能够正常运行不可缺少的是电机,然而电机必须由驱动芯片来进行驱动才能够转动,从而带动滚轮的滚动以及机械手的张合。L298N电机驱动芯片以其比较优异的性能更加适用于此机器人的直流电机的驱动,其电路图如图3所示。
3.3 74LVC8T245芯片
由于STM32F10x芯片的IO口输出的电流比较低,驱动一些比较大的负载比较困难,因此利用74LVC8T245芯片来增强IO口的驱动能力,它是是一个三态输出八路收发器,在提高IO口驱动能力方面作用比较大,使医疗服务机器人各部分能够有效的正常的运行。
4 医疗服务机器人实际运行情况介绍
在完成该医疗服务机器人的设计与制作之后,对其上述功能进行了实际的操作与实验,经过多次调试,该机器人可以基本实现医疗服务功能,能够比较好的完成查房和送药工作。
此外,该医疗服务机器人在参加2016年江苏省机器人大赛医疗服务赛项中取得了较好成绩。整个过程虽然有意外出现,但是整体完成的较好,准确率在85%以上。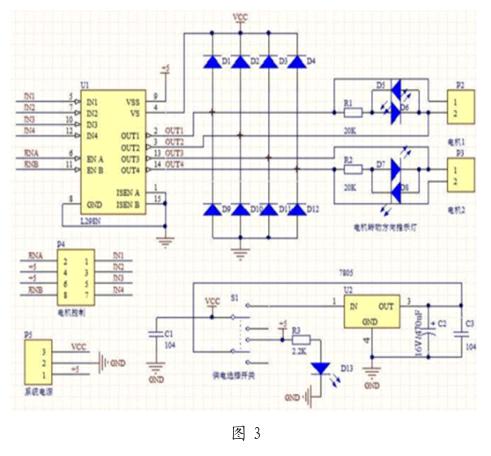
5 总结与展望
在设计及制作完该医疗机器人之后,可以发现机器人的设计是一个相对较复杂的过程,要能够实现对应的功能必须不断地调试,同时,要选取合适的芯片及机器人结果,确保所设计的机器人能正常运行。除此之外,在现有基础上也要加强机器人的完善,比如增加更加人性化的设置,如触摸屏,液晶屏控制等[ 3 ]。
纵观国内外机器人的发展,相信在不久的将来,医疗服务机器人的发展将会更加的迅速,它将会朝着人性化工业化的方向发展,会给更多的人带来便利。除此之外,医疗服务机器人也将会向高准确度,高可靠性、智能化方向发展[4]。未来,人类的双手会得到充分的释放,生产及工作效率会大大提高。
参考文献
[1]王永虹,徐炜,郝立平.STM32系列ARM Cortex-M3微控制器原理与实践[M].北京:北京航空航天大学出版社,2008.
[2]荣少巍.基于STM32的实收实发超声波检测系统研究[J].国外电子测量技术,2014,33(9):1-2.
[3]张毅,孙纯兴,李敏.医疗服务机器人功能设计及实现[J].机器人技术与应用,2011(6):3-4.
[4]黄敏华,李勇,陈容红.医疗服务机器人应用与发展研究报告[J].机电产品开发与创新,2014,27(3):4.
猜你喜欢
中国核电(2021年3期)2021-08-13
华人时刊(2017年21期)2018-01-31
北方交通(2016年12期)2017-01-15
汽车零部件(2014年9期)2014-09-18