
新型水库涵管隐患检测机器人的研制
2017-06-23 13:50赵华成潘聪华何理瑞李增芳
浙江水利水电学院学报 2017年2期
赵华成,潘聪华,何理瑞,李增芳
(浙江水利水电学院 工程实验实训中心,浙江 杭州 310018)
新型水库涵管隐患检测机器人的研制
赵华成,潘聪华,何理瑞,李增芳
(浙江水利水电学院 工程实验实训中心,浙江 杭州 310018)
目前市场上现有的管道机器人在管内调整姿态实现避障的功能较差.根据水库涵管的内部环境,设计了新型的伸缩式带转向功能的涵管隐患检测机器人,分析了机器人的变径机构和转向机构,并对管内拖动力进行了计算.检测机器人采用摄像头观测涵管内的缺陷,通过图像分析实现管内导航,通过可转向的驱动轮,调整检测机器人在管道中的姿态.控制系统采用摄像头成像,可实现管内图像记录和避障检测,为水库的安全运行提供了技术支持.
水库涵管;检测机器人;伸缩式;自行避障
目前,我国存在大量应用坝下埋涵小型水库,坝下埋涵易出现渗漏导致管涌或埋涵断裂引起溃坝等风险,水库运行期间工作人员需要定期检查监测工作.工作人员对水库涵管的检测主要采取人工观察测量、局部破损检测等办法,此类检测方法对于涵管距离稍远或遇到障碍物时,难以继续检测[1-2].
市场已有的管道机器人主要针对工业管道和细小的输送管道而设计,主要结构形式有PIG、螺旋驱动式、车轮式、足式和履带式的管道机器人[3-6].这些管道机器人或本质上无法实现避障,或未针对管内调整姿态实现避障进行研究.因此,本文设计一种可实现管道内部调整运行姿态而完成避障的水库涵管隐患检测机器人,并对该机构进行分析、设计.水库涵管隐患检测机器人可以方便检测水库涵管的运行情况,为水库的安全运行提供了技术支持.
1 涵管隐患检测机器人的工作原理
水库涵管隐患检测机器人总体示意图(见图1).检测机器人在涵管内通过电缆取得动力能源并与外界通讯,上位机负责图像采集与数据处理,下位机负责接收与解析运行指令,并驱动运行电机.同时,下位机还可以接受人工输入的指令,实现人工控制,即可实现自动导航及检测,又可脱离上位机由人工控制.为满足检测摄像头在圆形截面的涵管中保持居中,则要求检测机器人能实现自定心功能,因此采用三支撑轮式结构,由一组相隔120°夹角的三个支撑轮支撑机器人本体[7].水库涵管隐患检测机器人整体结构图(见图2),其工作原理为:

图1 水库涵管检测机器人总体示意图
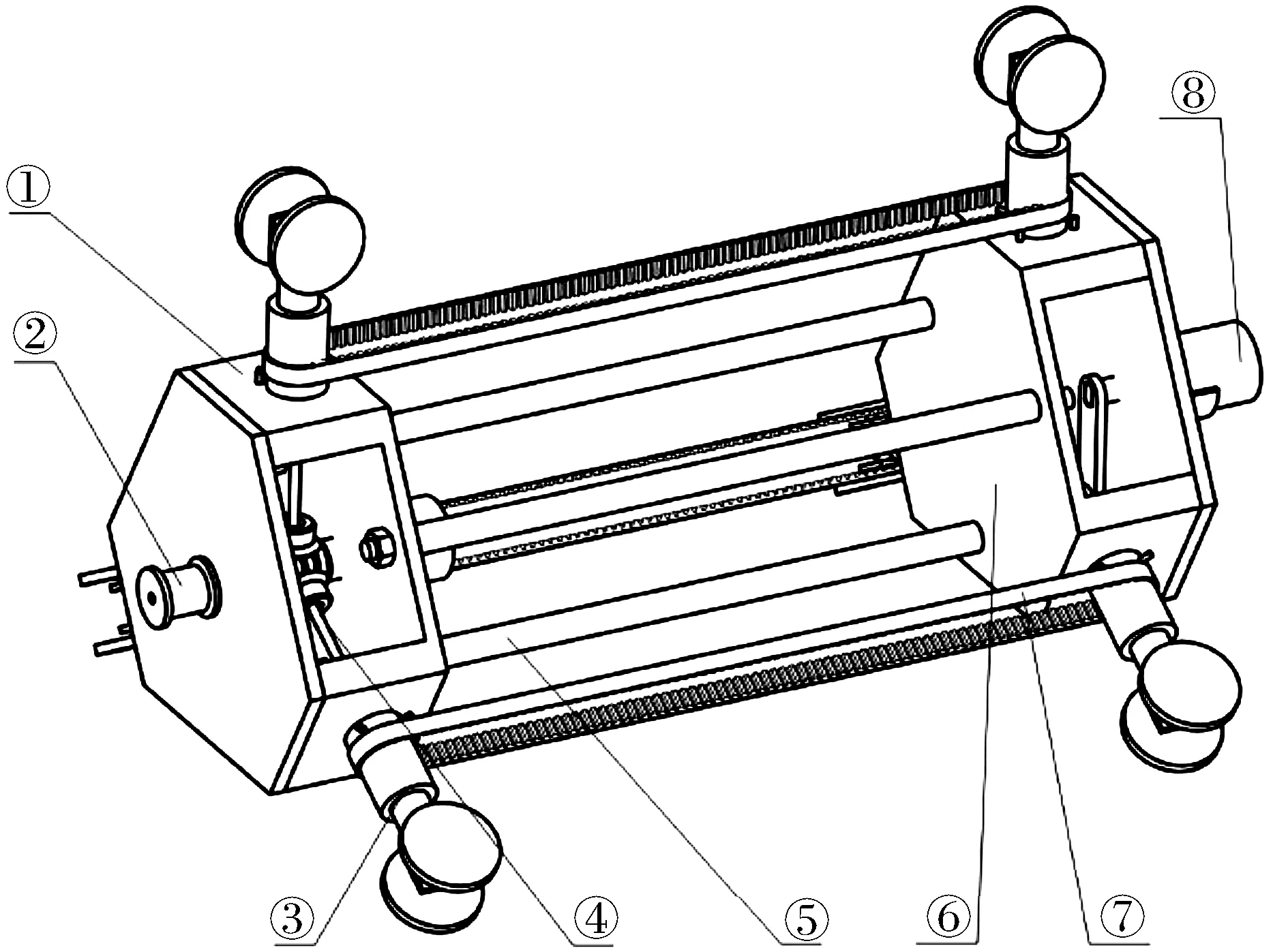
①—驱动轮组;②—转向系统;③—轮腿机构;④—分动系统;⑤—连接杆;⑥—从动轮组;⑦—同步带;⑧—控制系统图2 水库涵管检测机器人整体结构图
整个检测机器人采用双电机控制,其中一个驱动电机负责驱动运行,另一个转向电机负责控制转向.当控制系统8根据摄像头采集的图像判断前方没有障碍时,转向电机不工作,驱动电机开启;驱动电机的动力经分动系统4中的三根驱动轴传输给驱动轮组1的三个轮腿机构3;轮腿机构3通过内部齿轮传动带动轮腿机构上的两个驱动轮,从而驱动该检测机器人在水库涵管内直行.当水库涵管直径发生变化时,轮腿机构3在伸缩弹簧的作用下沿径向做伸缩运动,使得驱动轮始终紧贴水库涵管内壁.从动轮组6的三个轮腿机构3用于支承检测机器人的前部,并在驱动轮组1驱动下前进.
当控制系统8根据摄像头采集的图像判断前方遇到障碍时,驱动电机停止工作,转向电机开启,并计算出检测机器人避开障碍物需旋转的角度,即调整姿态角,转向电机驱动转向系统2使轮腿机构3转过90°,同时同步带7带动从动轮组6的轮腿机构转过90°.此时控制系统8启动驱动电机,使检测机器人绕水库涵管的中心轴作旋转运动;当姿态角能保证涵管检测机器人避开障碍物时,驱动电机和转向电机均停转,转向系统2在复位弹簧的作用下使轮腿机构3复位,同时同步带7驱动从动轮组6的轮腿机构复位.此时驱动电机启动,检测机器人在水库涵管内沿轴向继续直行.
2 涵管隐患检测机器人的结构设计
2.1 变径方案
为了适应不同直径的水库涵管管道,需要检测机器人具有变径功能.结合调整运行姿态的功能要求,本文设计的检测机器人采用伸缩式变径机构,在满足驱动轮伸缩过程中传递动力.伸缩变径机构示意图(见图3).在轮架与转向筒之间装置伸缩弹簧,且轮架与转向筒通过滑动副连接,从而保证检测机器人始终紧压管道内壁,使管壁与驱动轮间的摩擦力可以驱动机器人,并可以适应管道内径的变化.
2.2 转向机构方案
本文设计的水库涵管隐患检测机器人采用锥齿轮机构实现同步转向,其核心部件是由一个主动锥齿轮与三个从动锥齿轮组成的锥齿轮组,主动锥齿轮由步进电机控制,可以实现机器人的驱动轮在0°~90°之间转向角度,这种转向结构可以满足检测机器人在管道内自行调整运行姿态并实现螺旋式前进.锥齿轮转向机构简图(见图4),动作原理为:转向电机1通过联轴器与主动锥齿轮3连接,从动锥齿轮4与轮腿机构固结,通过锥齿轮啮合传动驱动转向轮,两组转向轮通过同步带5实现同步转向.

①—伸缩弹簧;②—转向筒;③—轮架图3 伸缩变径机构示意图
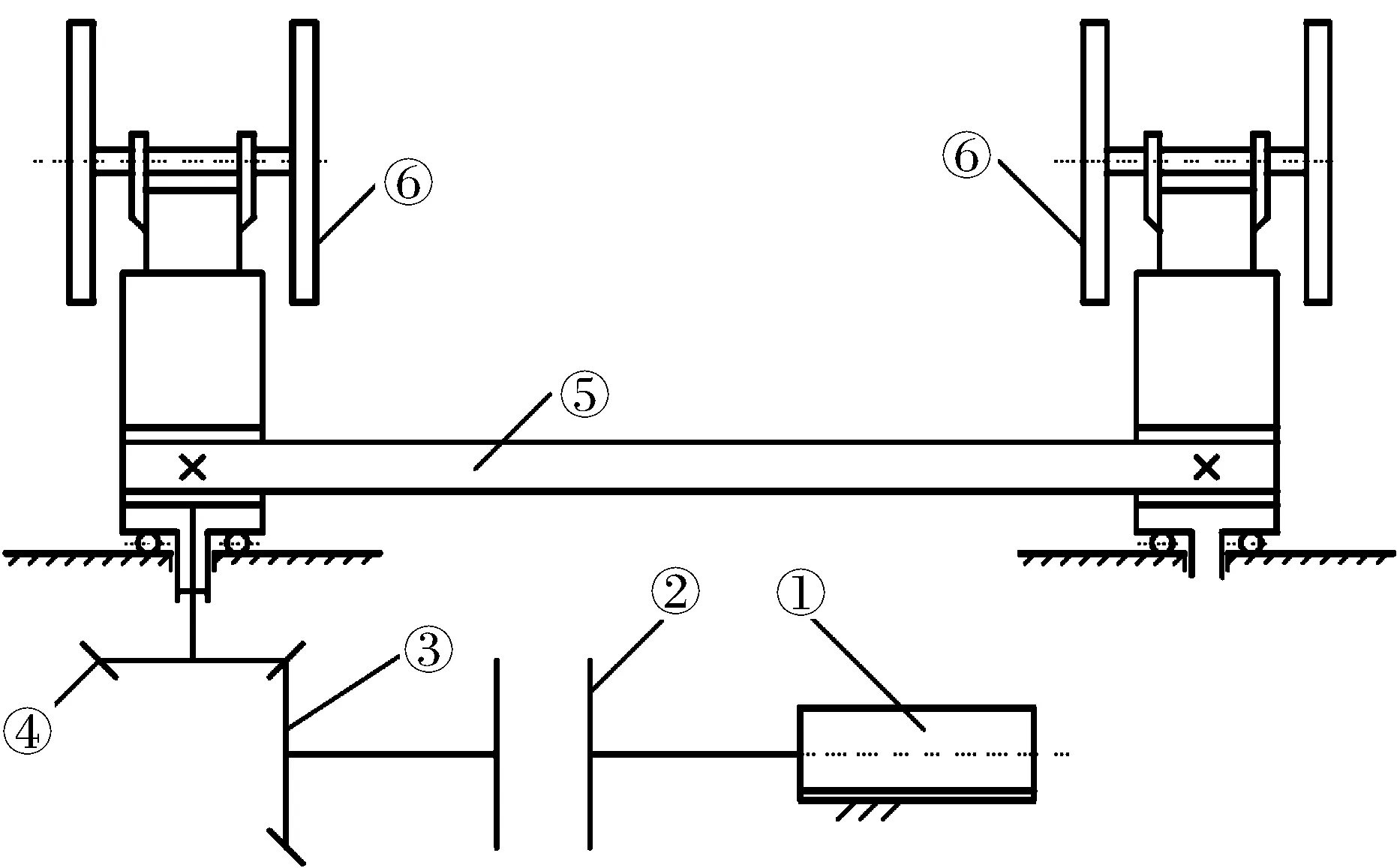
①—转向电机;②—联轴器;③—主动锥齿轮;④—从动锥齿轮;⑤—同步带;⑥—驱动轮图4 转向机构简图
2.3 拖动力的分析计算
涵管隐患检测机器人在涵管内爬行所需的拖动力与整机质量和缆线与管壁的摩擦力有关.考虑到水库涵管为直管,因此仅分析直线涵管内缆线的拖动力情况.假设涵管为水平布置且缆线与管壁之间完全接触,建立直缆线拖动力的数学模型(见图5).其中,f为缆线与管壁之间的滑动摩擦系数,ρ为缆线的线密度,υ为缆线的运动方向,F0为缆线自由端拉力,F1为涵管缆线拖动力,L为缆线学长,F为缆线瞬时受力[8].

图5 直线涵管内缆线受力分析图
取缆线其中的一段微元dl分析力的平衡方程得:
F+dFN×f=F+dF
(1)
其中dFN为dl段缆线压力,dFN=ρgdl,由此化简得到:
ρgfdl=dF
(2)
对两边进行积分可得:
(3)
由式(3)计算得到直线涵管内缆线的拖动力F1.
涵管检测机器人在管内受力分析简图(见图6),由于对称关系将整机简化到一个平面内进行分析,建立机器人本体的受力平衡方程式:
(4)
其中Fi(i=01,02,03)为涵管内壁对机器人的反作用力,θ为姿态角.

图6 涵管检测机器人的管内受力简图
考虑涵管检测机器人结构的对称性,故只分析姿态角ρ在0°~120°范围内的变化.但式(4)中有三个未知数,仅两个方程无法得到唯一解.假设涵管检测机器人在重力作用下,其工作时处于最上方的轮子受到的正压力为零,由此解出另外两个正压力.
可得检测机器人本体的拖动力:
F2=f(F02+F03)
(5)
或
F2=f(F01+F02)
(6)
综上,总的拖动力Ft计算公式为:
Ft=F1+F2
(7)
根据计算结果,可以选定驱动电机型号.
3 涵管隐患检测机器人控制系统的设计
3.1 电气控制方案
为提高涵管检测机器人的可靠性,本检测机器人的管内检测图像采集和避障导航均采用摄像头实现.由摄像头采集管内视频信息供人工监控,上位机间隔采集视频流的帧图像以供分析并实现导航.
电气控制采用独立的控制箱,接收上位机的控制指令.为提高控制系统的抗干扰能力,将控制箱内部驱动器和控制器分离,控制方案(见图7).下位机位于控制箱,由下位机负责解析和执行命令,驱动检测机器人在涵管内进行有效作业[9].
当涵管内出现障碍物时,检测机器人根据图像
分析得到的结果将障碍物的中心找出,计算出障碍物相对于摄像机的方位角和障碍距离,进行调整姿态.
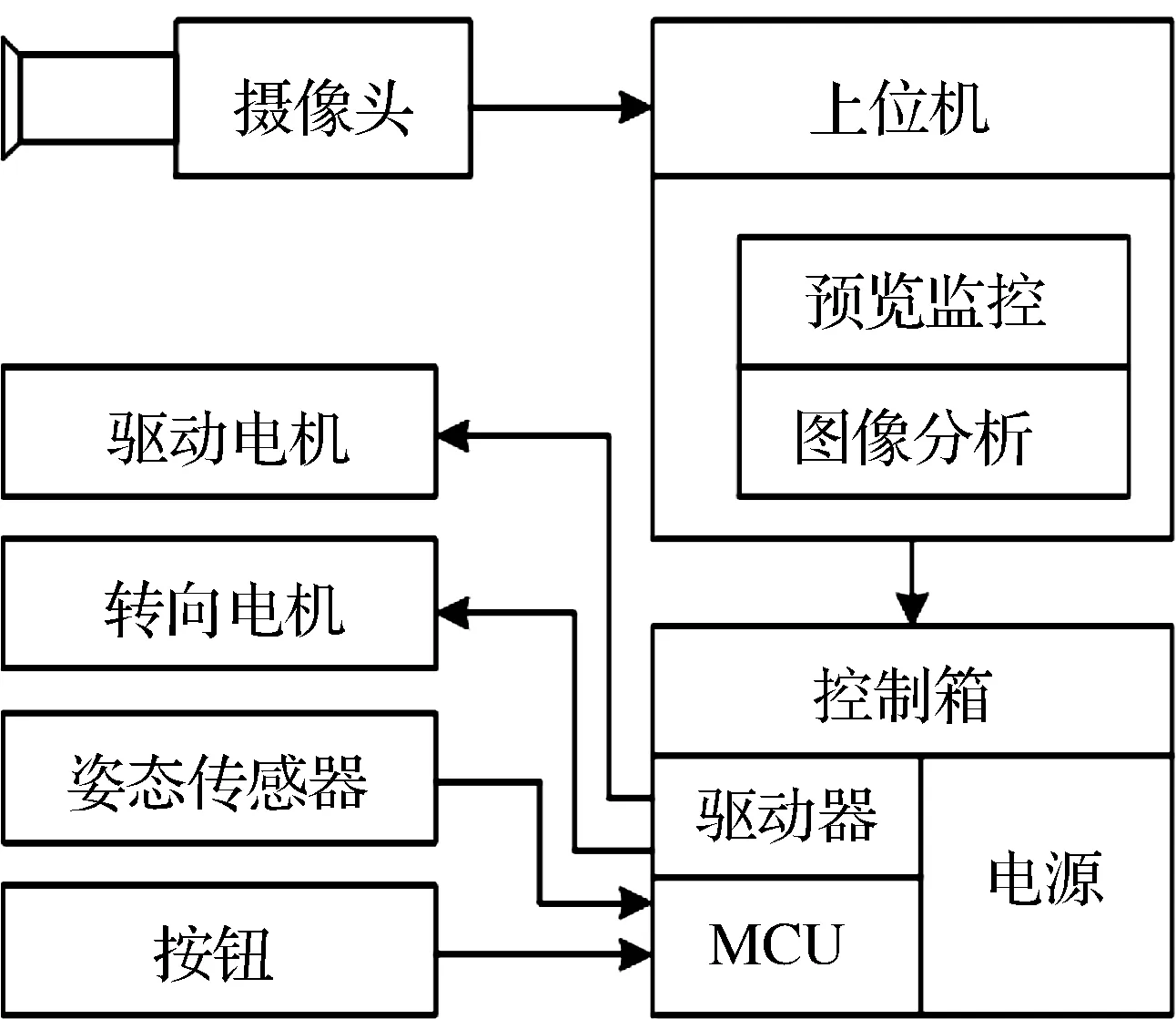
图7 涵管检测机器人控制方案
3.2 控制系统的电路设计
控制系统主要由控制箱、驱动电机、转向电机、电机驱动器、串口电缆等组成.控制电路的工作原理是通过主控芯片的统一调度,由主控芯片负责倾角传感器的数据读取,并与上位机串口通讯发送数据与接收指令,通过电机驱动器控制驱动电机和转向电机的配合运行,主控芯片也可通过人工按钮指令控制[10].控制电路原理(见图8).
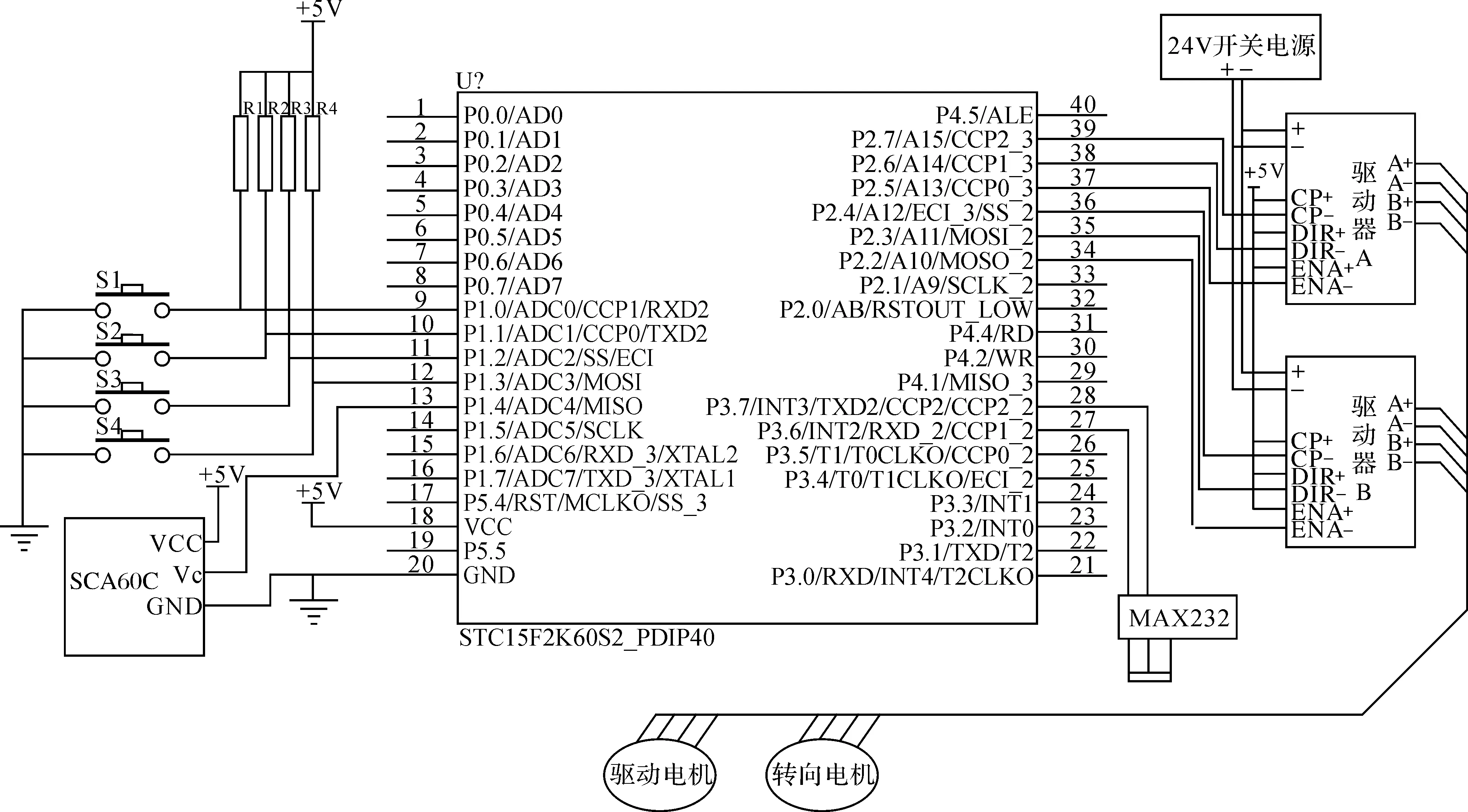
图8 控制电路原理图
4 结 论
本文针对水库直涵管检测,设计了伸缩式涵管隐患检测机器人,提出了管内避障的新方法,通过可转向的驱动轮,调整检测机器人在管道中的姿态.控制系统采用摄像头成像,可实现管内图像记录和避障检测,原理简单,性能稳定.
[1] 蒋金平,杨正华.中国小型水库溃坝规律与对策[J].岩土工程学报,2008,30(11):1627-1628.
[2] 盛金保,李 雷,王昭升.我国小型水库大坝安全问题探讨[J].水利工程建设,2006(2):41-30.
[3] 曹建树,林 立,李 杨,等.油气管道机器人技术研发进展[J].油气储运,2013,32(1):3-5.
[4] 陈 松,李天剑,王会香,等.排水管道机器人的综述[J].机器人技术与应用,2014(1):23-24.
[5] 邓宗全,陈 军,姜生元,等.六独立轮驱动管内检测牵引机器人[J].机械工程学报,2005,41(9):67-68.
[6] 陈宗尧,颜国正,王坤东,等.关节履带式管道检测机器人越障性能优化[J].上海交通大学学报,2011,45(7):1018-1020.
[7] 徐高欢,谢怡杰,张夏良,等.水库涵管检测用十字结构全向型管道机器人研究[J].机床与液压,2016,44(18):17-20.
[8] 张子华,何富君.针对连排管的管外爬行机器人设计与分析[J].机械传动,2016,40(8):63-66.
[9] 夏旭东.水库涵管检测机器人的设计与试验[D].杭州:浙江理工大学,2016.
[10] 谢文彬,杨建国,李蓓智,等.管道检测机器人的研制[J].机器人技术,2005(1):14-16.
Study on Novel Pipeline Detection Robot Used in Reservoir Culvert
ZHAO Hua-cheng, PAN Cong-hua, HE Li-rui, LI Zeng-fang
(Engineering Experimental Training Center, Zhejiang University of Water Resources and Electric Power, Hangzhou 310018, China)
At present, the function of existing pipeline robots of adusting their posture to avoid obstacles. According to the interior environment of the reservoir culvert, the novel detection robot is designed. The robot uses telescopic support wheels and the drive wheels can be turned when the robot is walking. The telescopic and steering mechanism of pipeline detection robot is analyzed. And the drag force is calculated. The defects of the pipeline are observed by a camera, and the navigation in pipeline is done through the analysis of the image. The robot avoids the obstacle in the pipe by adjusting its attitude angle. The development of new detection robot provides technical support for the safe operation of the reservoir.
reservoir culvert; detection robot; telescopic; automatic avoidance
2016-10-26
2015年浙江省水利厅科技计划项目(RC1508);浙江省高等教育教学改革项目(JG2013204)
赵华成(1989-),男,安徽合肥人,硕士,助理实验师,研究方向为机械工程实训.
TP242
A
1008-536X(2017)04-0071-05
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
科技创新与应用(2021年17期)2021-12-31
科学技术创新(2021年22期)2021-08-16
初中生学习指导·提升版(2020年4期)2020-09-10
中国新技术新产品(2020年4期)2020-05-05
制造技术与机床(2019年8期)2019-09-03
通信电源技术(2019年8期)2019-01-16
北京汽车(2018年4期)2018-09-08
中国新通信(2017年4期)2017-04-10
