基于茎基部分区边缘拟合的稻株定位方法
2017-06-27 08:12崔宏伟区颖刚郑文汉
农业机械学报 2017年6期
蒋 郁 崔宏伟 区颖刚 马 旭,3 齐 龙,3 郑文汉
(1.华南农业大学工程学院, 广州 510642; 2.华南农业大学现代教育技术中心, 广州510642;3.南方粮油作物协同创新中心, 长沙 410128)
基于茎基部分区边缘拟合的稻株定位方法
蒋 郁1,2崔宏伟1区颖刚1马 旭1,3齐 龙1,3郑文汉1
(1.华南农业大学工程学院, 广州 510642; 2.华南农业大学现代教育技术中心, 广州510642;3.南方粮油作物协同创新中心, 长沙 410128)
准确地定位稻株是水稻株间除草机械作业的前提,提出了侧位俯拍的图像采集方式获取稻株茎基部图像,采用茎基部分区边缘拟合的方法定位稻株,解决了除草期内水稻冠层接连引起的定位不准确问题。首先分析稻株生长形态,探究侧位俯拍稻株茎基部的相机安装参数设定,以及影响成像质量的相关因素,提出了遮光条件下采集图像的方法,构建了具有遮光功能的图像采集系统;其次采用2G-R-B彩色图像灰度化、自动阈值、形态学操作等方法处理并分割稻株图像,检测茎基部边缘并分析其形态特征,并提出了分区边缘拟合定位方法:划分拟合区间为3个子区间,在子区间内进行边缘拟合,以拟合边缘线段中点坐标均值作为子区间茎基部中点,根据中点拟合茎基部中线,以中线中点作为定位的茎基部中心。最后进行了基于茎基部与冠层的稻株定位精度田间对比试验,结果显示:插秧后10~20 d内,基于茎基部的稻株定位误差均在7.0 mm以下,其中10 d、15 d、20 d时的定位误差分别为6.9 mm/6.8 mm、5.9 mm/5.8 mm、6.3 mm/6.5 mm(有水条件/无水条件);基于冠层的稻株定位误差在8.0 mm以上,其中插秧20 d后,定位误差超过15 mm以上。试验结果表明,所提出的基于茎基部分区边缘拟合的稻株定位方法,定位精度高,除草适用期长,可满足株间机械除草过程中对稻株精准定位的技术要求。
水稻; 机械除草; 株间除草; 定位; 茎基部
引言
避开作物选择性地对株间杂草进行防除是机械除草的最大难点[1]。机插秧虽理论上株距分布均匀,但实际生产中由于单位面积上的取秧量不同、漏插以及漂秧现象的存在,致使水稻株距分布不均匀,因此,要实现水稻株间机械除草,首先需要对稻株进行精准识别和定位。
目前,作物自动识别与定位常采用机器视觉技术,然而识别与定位精度常受图像背景的复杂度、作物与杂草形态的相似性以及环境因素等影响,给田间智能机械除草装备的研究和应用带来很大困难。TILLETT等[2]应用二维小波技术结合Kalman跟踪算法识别目标作物莴苣个体并获得其位置信息,形成决策后控制除草部件完成株间除草作业。ASTRAND等[3]对大量甜菜及其杂草的颜色、形状和不变矩特征信息进行提取,并建立了k-NN分类器,对甜菜的识别正确率达到80%以上。翟志强等[4]提出一种基于Census变换的作物行识别算法,通过改进超绿-超红方法灰度化图像提取绿色作物特征,以最小核值相似算子检测作物行特征角点,运用基于Census变换的立体匹配方法和宽度阈值提取作物行特征点,最后利用主成分分析法得到作物行中心线。胡炼等[5]在超绿颜色空间,利用Otsu图像分割及形态学运算方法,识别棉苗和生菜苗,根据行列像素累加结合绿色植物连通域的质心获取作物的位置信息。
以上研究均采用机器视觉技术从目标作物的冠层进行识别和定位;识别和定位的作物多为叶菜类作物,株距较大;作物冠层形态特征相对简单,相邻植株无接连;图像背景多为旱地。然而,对于水稻这种小株距作物而言,不仅冠层形态特征较为复杂,而且水稻开始分蘖后,相邻稻穴冠层叶片出现接连,采用机器视觉技术通过冠层定位与根部实际位置存在较大偏差。此外,水田背景环境复杂、水层反光,也给稻苗的识别和定位带来一定困难。近年来,NAKARMI等[6]采用茎部定位的图像处理方式定位作物,通过3D相机采集玉米茎基部图像,进而提取出作物株距信息,该方法可以适应作物不同生长时期的定位要求。
本研究通过分析稻株的形态特征,提出侧位俯拍的图像采集方式,通过合理设定图像采集参数获取稻株茎基部图像;同时构建具有遮光功能的图像采集系统,以提高自然光下稻苗与背景的差异。
1 材料与方法
1.1 稻苗样本培育
供试水稻品种为天优173。2016年4月19日,在试验基地温室内(113.35°E、23.16°N)培育稻苗,温室内相对湿度为60%~70%,昼夜平均温度分别为28、20℃。水稻种子经浸泡消毒24 h后,冲洗、催芽,然后进行播种、育秧。肥水按照常规措施均一管理。2016年5月15日,当稻苗平均高度约为25 cm,冠层平均直径约为13 cm时,将稻苗分别移栽到3个试验土槽(长×宽×高为200 cm×90 cm×40 cm)内。每个试验土槽移栽稻苗20株,即每行10穴,每列2穴。根据目前机插秧的相关作业参数,行距设定为30 cm,株距12~17 cm随机。试验槽放置地点的相对湿度为65%~75%,昼夜平均温度分别为26、20℃。试验槽土壤选取稻田土,模拟实际水田情况,并有杂草分布。
1.2 图像采集
1.2.1 图像采集系统
图像采集系统主要由彩色相机(acA640-90gc,BASLER,德国)、镜头(M0814-MP,COMPUTAR,日本)、计算机(B470,Lenovo)、遮光装置、移动平台、轨道等组成,如图1所示。其中相机分辨率为640像素×480像素,镜头焦距8 mm,光圈F1.4~F16C,采集帧率60 f/s,遮光装置的框架材料为铝合金,遮光布的材料为聚酯纤维。图像采集及处理程序均在In-Sight Explorer 4.9.3(COGNEX,美国)下完成。
图像采集时,首先将相机安装在移动平台上;然后控制移动平台沿平行于作物行的轨道运动,保持相机与稻苗的相对位置固定,不发生横向偏移。

图1 图像采集系统俯拍图像Fig.1 Image acquisition system1.计算机 2.相机 3.遮光装置 4.移动平台 5.稻苗 6.轨道 7.土槽
1.2.2 系统参数设定
1.2.2.1 侧位俯拍的相机安装参数设定

图2 不同生长时期的稻株俯拍图像Fig.2 Top views of rice seedlings at different growth stages
稻苗冠层形态特征复杂,除草时相邻稻株叶片接连,基于冠层识别和定位稻株存在误差。参考侧位图像采集的相关研究[7-8],并结合稻株茎基部成束的生长特点,本研究提出侧位俯拍稻株茎基部的图像采集方法。侧位俯拍是指:在与目标行相邻的行间,略高于稻株冠层的部位对目标稻株茎基部进行图像采集。
因水稻除草期一般为插秧后10~20 d,为探究除草期内,侧位俯拍稻株茎基部的适用性,本研究选取插秧后10 d、15 d、20 d,进行稻株冠层与茎基部图像样本采集,并对比分析。图像采集结果如图2所示。
图2a、图2b 3幅图分别为稻苗插秧后10 d、15 d、20 d采集的图像。对比图2a、2b可以看出,在除草期内,随着稻株生长,相邻稻株冠层接连状态愈加明显,难以区分,而相邻稻株茎基部始终易于区分。由此可见,在除草期内,侧位俯拍稻株茎基部的方式与垂直俯拍冠层的方式相比更利于稻株的识别和定位。
然而,由图2b可以看出,目标稻株茎基部的识别与定位易受相邻行稻株影响,其原因是相机视野不适合,而相机视野与物距有关,物距增大,则视野增大[9]。侧位俯拍时相机物距与相机安装的高度、俯角等参数相关,因此,为获得清晰且不受邻行干扰的稻株茎基部图像,应对相机的相关拍摄参数进行合理的设定。
图3为相机安装不同位置的示意图。图中点O1、O2表示相机安装位置。h1、h2表示相机安装高度,l表示相机安装位置与目标稻株水平距离,γ1、γ2表示相机安装俯角,Rh1、Rh2表示株高和茎基部高度,设定稻株茎基部高度为株高的2/3,即Rh2=2Rh1/3。
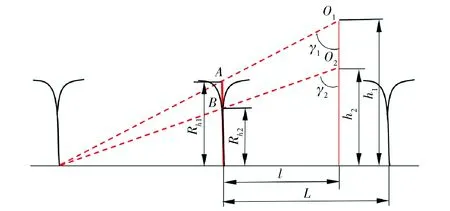
图3 相机安装位置示意图Fig.3 Schematic diagram of camera installation position
相机安装时需避免相邻行稻株冠层对镜头视野的遮挡,同时需避免机具行进过程中设备对稻株的影响。设行距L,相机安装于行间,安装水平距离l约为2L/3。在水平距离l=2L/3时,纵向调整相机位置,同时调整俯角γ,使视野满足要求,即视野中不包含相邻行稻株茎基部。如图3位置O1、O2。当相机位于O1上方时,物距过大导致相机视野中稻株变小,稻株茎基部在图像中所占面积较小,不利于茎基部边缘的提取,进而影响茎基部中心的定位;当相机安装于O1点与O2点之间,即h2≤h≤h1时,可调整俯角γ,使视野满足要求;当相机位于点O2下方时,分析可知不存在满足视野要求的俯角。
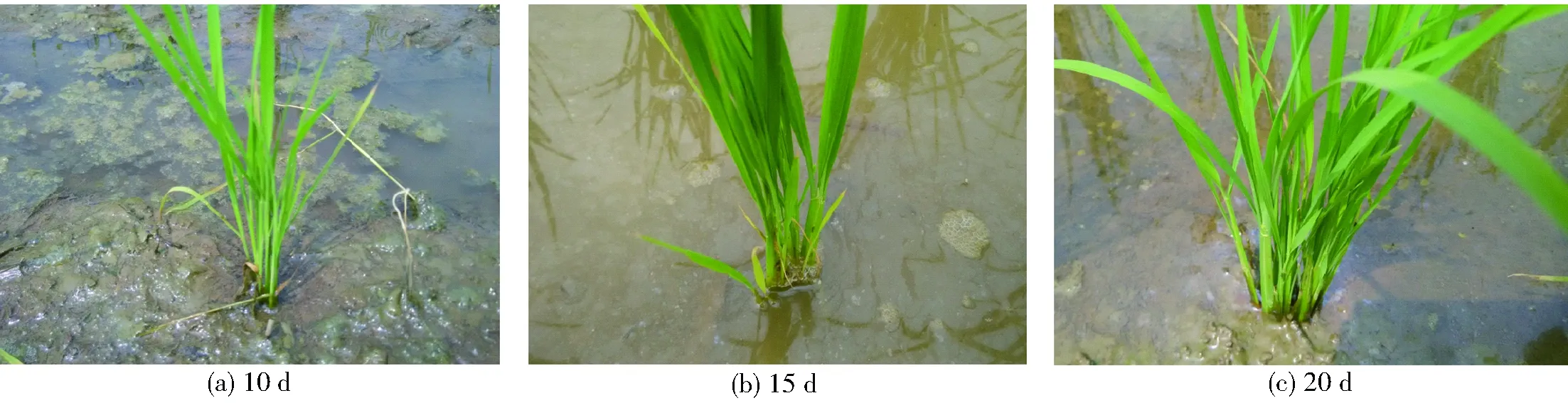
图4 合理安装相机时稻株茎基部图像Fig.4 Stem base images of rice seedlings with reasonable installation parameters of camera
由图3,根据相似三角形原理,得h1=5Rh1/3,h2=10Rh1/9,因此相机安装高度范围为10Rh1/9≤h≤5Rh1/3,本研究中取相机安装高度为4Rh1/3。此时根据反正切函数求得γ范围为arctan(L/Rh1)≤γ≤arctan(5L/(4Rh1)),本研究中选定俯角γ为arctan(L/Rh1)。综上所述,相机安装水平距离为2L/3,安装高度为4Rh1/3,俯角γ为arctan(L/Rh1)。进行相机安装时,可根据稻株生长形态,对高度、俯角进行适当调整,以期达到稻株成像部位适合,视野中仅包含目标稻株茎基部的目的。
本研究中秧苗行距为300 mm,因此相机安装水平距离约为200 mm;插秧后10~20 d范围,稻株平均高度约为270 mm,因此安装高度约为360 mm,俯角约为48°。
根据上述参数安装相机,采集不同时期稻株茎基部图像,如图4所示。由图4可以看出,经过合理设置相机安装参数可以采集到较好的稻株茎基部图像,进一步减小了定位难度,因此本研究图像采集均采用上述参数安装相机。
1.2.2.2 移动平台前进速度设定
相机采集帧率为60 f/s。进行株间除草作业实时采集图像时,为避免重复计算稻株,设置只有当视野中图像满足条件时(条件见1.4.3节),才进行后续图像处理,从而避免重复计算稻株。
1.2.2.3 图像采集环境因素设定
Phong光照模型将照射到物体表面的光照分类为漫反射光和镜面反射光。所谓镜面反射光是指由于物体表面光滑,光线照射到物体表面时产生镜面反射,镜面反射使物体表面产生一块亮度特高的区域[10]。水田环境中,由于水面的镜面反射作用,使视觉系统成像区域出现亮度较高的区域,影响稻株的识别和定位[11]。
为提高图像样本中稻株与背景的灰度差异,减少图像噪声,需调控影响成像质量的相关因素,主要包括成像区域是否具有水层,以及成像区域是否遮光。本研究中成像区域遮光是指通过遮光装置屏蔽镜面反射光,使稻苗处于光照漫反射区,从而使水中无倒影、亮斑,遮光装置布置如图1所示。为探究以上两种因素对成像质量的影响,分别选择无水无遮光、有水无遮光、无水有遮光、有水有遮光4种条件进行图像采集,有水时的水层厚度约为2 cm,图像采集结果如图5所示。
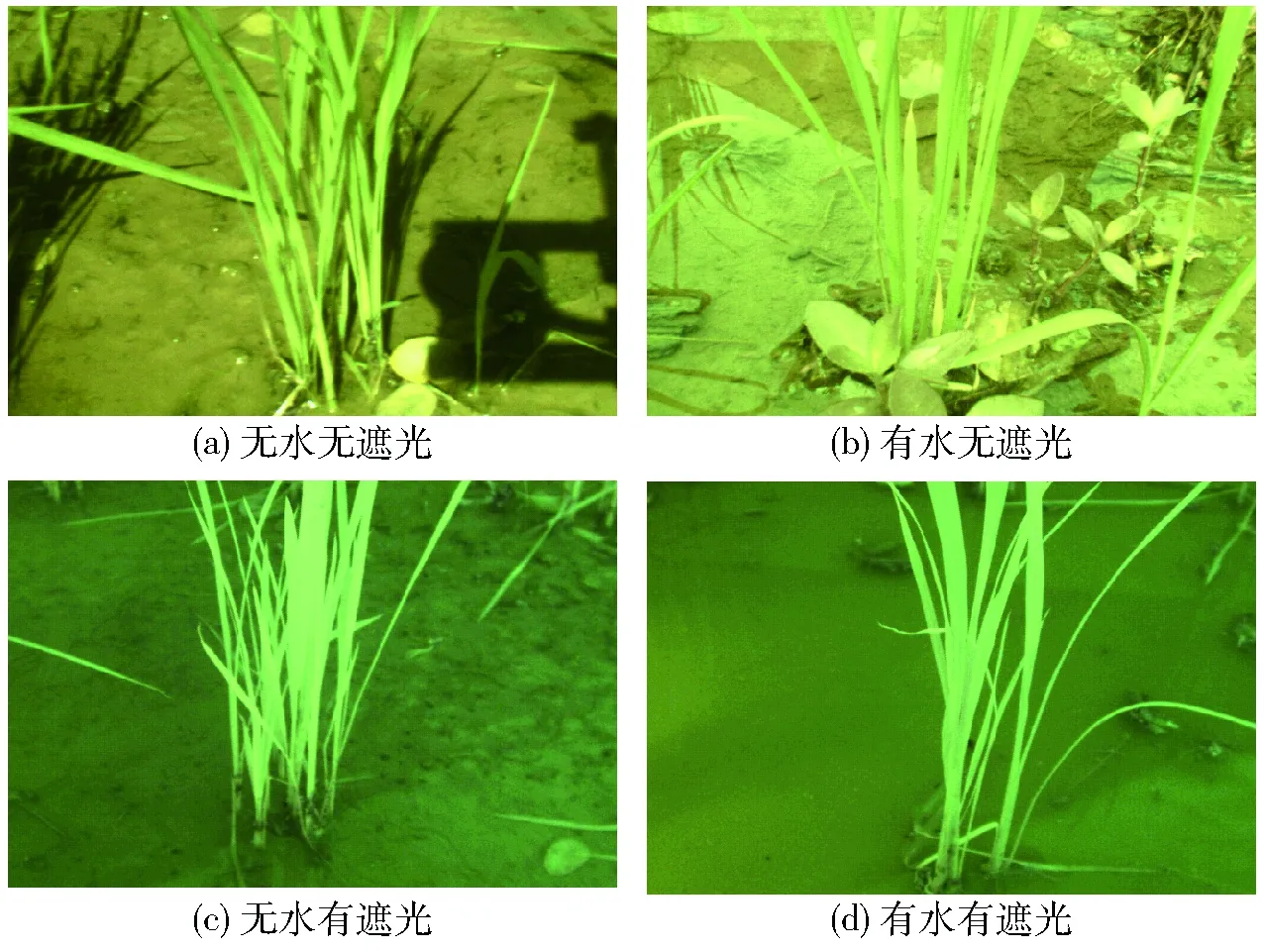
图5 不同光照条件下图像采集结果Fig.5 Images captured under different light conditions
对比图5a和图5c可见,稻田无水、自然光照条件下,泥土反光,稻苗与泥土灰度差异不明显;遮光条件下图像中稻株与背景的灰度差异较大,易于后续的图像分割。稻田有水时,由于水面反射,无遮光时水面倒映移动平台、天空、云等物体,导致图5b背景中包含较多噪声,影响后续图像处理,而采用遮光的方式,图像质量明显改善。综上所述,本研究图像采集均在遮光条件下进行。
1.2.3 图像采集步骤
图像采集步骤为:①调整安装相机,使第1株稻株茎基部位于图像中部。②调整镜头焦距与光圈,使稻株成像清晰。调整移动平台前进速度为0.15 m/s。③将试验槽中的水层厚度调整至2 cm左右。④启动图像采集系统与移动平台,来回2次完成一试验槽稻株的采集。⑤将试验槽中的水全部排出,重复步骤④。⑥一试验槽图像样本采集完成后,进行另一个试验槽图像样本采集,重复以上步骤。
图像采集在插秧后10 d、15 d、20 d进行,采集有水、无水图像各50幅,共300幅图像用于定位方法分析。
1.3 图像分割
为突出稻株灰度,弱化背景,需将RGB彩色图像各颜色分量适当组合转换。秧苗灰度化最常用方法为[12-13]:用2G-R-B对原图像进行灰度化,计算式为
(1)
式中Gray(x,y)——像素坐标(x,y)的灰度R、G、B——像素的红、绿、蓝颜色分量

图7 无分区边缘拟合定位方法Fig.7 Edge fitting in non-separated region of stem base
该方法可以突出绿色颜色空间灰度,而阴影和土壤得到较好的抑制效果。其中无水遮光图像样本灰度化后所得效果如图6b所示。
图像采集时,光照强度变化影响图像的灰度分布,因此,无法采用固定阈值的方法进行图像分割。本研究选取最大类间方差法(Otsu 法)自动确定阈值对图像进行二值化处理。最大类间方差法是一种自动选择阈值的方法[14-16]。利用Otsu 法计算出最优阈值Th,使用阈值Th对灰度图像二值化后的结果如图6c所示。由图6c可知,二值化后的稻株茎基部外边缘不平滑,内部存在较多孔洞,不利于稻株茎基部边缘提取和中心定位。为平滑稻株茎基部外边缘,同时填充茎基部内部孔洞,减少噪声,本研究选用先进行3次腐蚀,后进行3次膨胀的形态学操作对二值图像进行处理[17-18]。将处理结果进行面积滤波,过滤像素面积小于1 500像素的连通区域[19],然后通过孔洞填充操作,填充稻株茎基部内部存在的孔洞,形态学操作处理结果如图6d所示。

图6 图像分割结果Fig.6 Image segmentation results
1.4 定位方法分析
1.4.1 边缘检测
边缘的定义为图像中灰度发生急剧变化的区域边界。根据灰度变化的剧烈程度,通常将边缘划分为阶跃状和屋顶状两种类型[20]。阶跃边缘两边的灰度变化明显,而屋顶边缘位于灰度增加与减小的交界处[21]。二值图像中边缘两边的灰度变化明显,属于阶跃状边缘。其中较优的阶跃状边缘检测算法为Canny边缘检测,先使用高斯滤波器平滑图像,接着用一阶偏导的有限差分来计算梯度的幅值和方向,然后对梯度幅值进行非极大值抑制,最后用双阈值算法检测边缘。
运用Canny边缘检测算子在图像内检测稻株茎基部边缘,检测结果如图7a、8a所示,图7b、8b为检测到的边缘示意图。

图8 分区边缘拟合定位方法Fig.8 Edge fitting in separated region of stem base
1.4.2 分区与边缘拟合
1.4.2.1 设定茎基部边缘的拟合区间
由于茎基部定位稻株不需要稻株冠层,因此在茎基部中下部设计拟合区间。由于稻株茎基部直径不一,为使拟合区间充分包含茎基部,设计拟合区间宽W=3Rr(Rr表示图像中茎基部直径),而茎基部定位不需要稻株冠层,因此设计拟合区间高度H为图像高度的3/4。
本研究测量50穴稻株插秧后20 d时茎基部的直径(表1)。由表1知,稻株茎基部直径均小于50 mm。经坐标转换为像素坐标系,稻株茎基部直径均小于90像素,因此设计拟合区间宽度(W)为270像素;本研究图像高度为480像素,因此设计拟合区间高度(H)为360像素。根据拟合区间的尺寸,将区间放置到图像中间位置,区间左上角顶点坐标为(185,60)。拟合区间如图7c、8c中的大矩形所示,其中虚线又将矩形区域分2个虚拟小区间,表示边缘拟合分别在两侧进行。

表1 茎基部直径分布
1.4.2.2 划分拟合区间与边缘拟合
采用Hough变换中的直线拟合算法进行边缘拟合[22-23]。Hough变换中的直线拟合算法在极坐标下表示为
ρ=xcosθ+ysinθ
(2)
式中ρ——原点到直线交点间的距离θ——垂直于图像中直线的直线角度
Hough变换中的直线拟合采用极坐标方程,将检测的边缘像素点变换到极坐标系中,根据图像分辨率确定ρ和θ范围,同时分配累加器,然后进行Hough变换,不断调整θ值,得出ρ值,并在对应的累加器累积加1。最后,检测整个参数空间累加器的峰值,此峰值即为对应图像中直线的参数。边缘离散点拟合直线主要由In-Sight Explorer中的FindLine函数实现,在此工具中设定边缘拟合的方向为纵向,横向边缘不进行拟合。
采用Hough变换算法在拟合区间的左右两侧对边缘像素点进行拟合,得到代表边缘的线段,如图7d中黄色实线为边缘拟合结果;计算两条线段中点坐标均值,作为该方法定位的稻株中心,定位中心的横坐标显示在图右上方,如图7e所示。此过程称为无分区边缘拟合定位方法,定位过程如图7a、7c、7d、7e所示。由图7e可以看出,定位中心向左侧偏离,其原因如下:①由图7b可以看出,茎基部边缘生长姿态不对称,仅左侧边缘向左侧倾斜,而右侧边缘基本保持竖直状态,导致拟合的两侧边缘线段不对称,如图7d所示,两侧边缘线段中点坐标均值向实际茎基部中心左侧偏离,从而造成定位误差。②如图7b所示,检测到的茎基部边缘不平滑,存在凸起的尖锐边缘,采用Hough变换的直线拟合算法在整个区间内进行边缘拟合,拟合结果易受到凸起尖锐边缘的影响。
为减小以上原因造成的定位误差,本研究提出分区边缘拟合的方法。所谓分区边缘拟合是指:将拟合区间分为上、中、下3个子区间,在每个子区间内进行边缘拟合。边缘拟合结果如图8d所示,图中黄色实线表示拟合的边缘,可以看出仅上部区间内拟合的边缘线段不对称,其边缘线段中点坐标均值较实际茎基部中点向左侧偏离;中、下部区间内的边缘线段基本保持对称状态,其边缘线段中点坐标均值可代表茎基部中点。为进一步减小边缘不对称造成的误差,利用3个子区间内的茎基部中点拟合线段,求线段中点作为茎基部中心,详述见下文。
1.4.3 中心定位
在区间边缘拟合完成后,对拟合结果进行判定,若子区间两侧均存在拟合边缘,则求两侧边缘线段中点坐标均值作为该区间内茎基部的中点;若子区间不存在或仅一侧存在边缘,则认为该区间无茎基部中点;若中点数小于2,则无法进行直线拟合,图像不满足要求。
利用子区间存在的茎基部中点,结合最小二乘法拟合茎基部中线。最小二乘法原理为:设拟合的直线x和y之间的函数关系为
y=a+bx
(3)
式中有2个待定参数,a表示截距,b表示斜率。用最小二乘法估计参数时,要求观测值yi偏差的加权平方和Q为最小,即
(4)
式中,(xi,yi)表示子区间茎基部中点。分别对a、b求偏导得
(5)
式(5)可得到参数a、b的值,即可得到拟合的直线。最小二乘法拟合直线通过LineFromNPoints函数实现。
图8d中3个红色小圆表示各子区间茎基部中点,由子区间茎基部中点拟合中线的结果如图8d中茎基部中间的线所示。以拟合中线的中点作为定位中心,定位结果如图8e所示,图中数值为定位中心的横坐标。
2 试验与分析
2.1 田间茎基部定位试验与分析
2.1.1 横向纠偏系统
在田间进行机械除草作业时,机具在行进的过程中会产生横向偏移,为此研制了横向纠偏系统,实时控制机具的横向偏移。横向纠偏系统主要包括苗带线视觉提取系统和液压控制系统,其原理为:安装垂直俯拍苗带的相机(图9b),实时采集苗带图像,运用基于Hough变换统计学特性的作物行线提取算法[24],进行苗带线提取,提取结果如图10b所示,图中红色实线为提取苗带线,绿色实线为当前相机指示方向,测量2条线之间的夹角β为苗带偏转角。通过液压控制系统实时调整除草机架,使除草部件与苗带保持平行(苗带偏转角β约为0°),避免伤苗。液压控制系统电路图如图9a所示,当检测到苗带发生偏转时,发出信号到IO模块,通过PLC控制液压缸伸缩实现除草机架的实时调整纠偏。
本研究进行稻苗茎基部图像采集时,通过横向纠偏系统实时调整侧位俯拍相机(图9b)的横向偏移,保持侧位俯拍相机与稻苗相对位置不变。控制系统实物图如图9b所示。
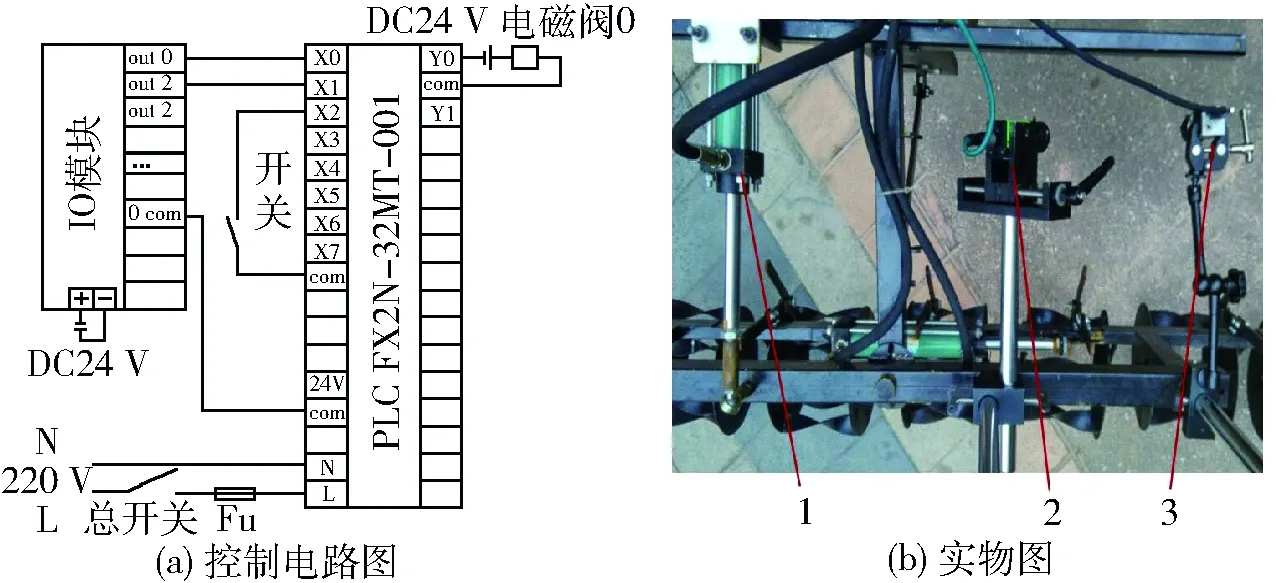
图9 横向纠偏系统Fig.9 Control system of lateral offset1.液压缸 2.侧位俯拍相机 3.垂直俯拍相机

图10 苗带线提取Fig.10 Seedlings line extraction
2.1.2 茎基部中心线标定
在广东省江门市试验田进行田间测试时,将横向纠偏系统和茎基部图像采集系统安装在水田拖拉机上(图11),按照1.2.2节中关于系统参数的设置要求安装侧位俯拍相机,设置拖拉机行驶速度为0.15 m/s。
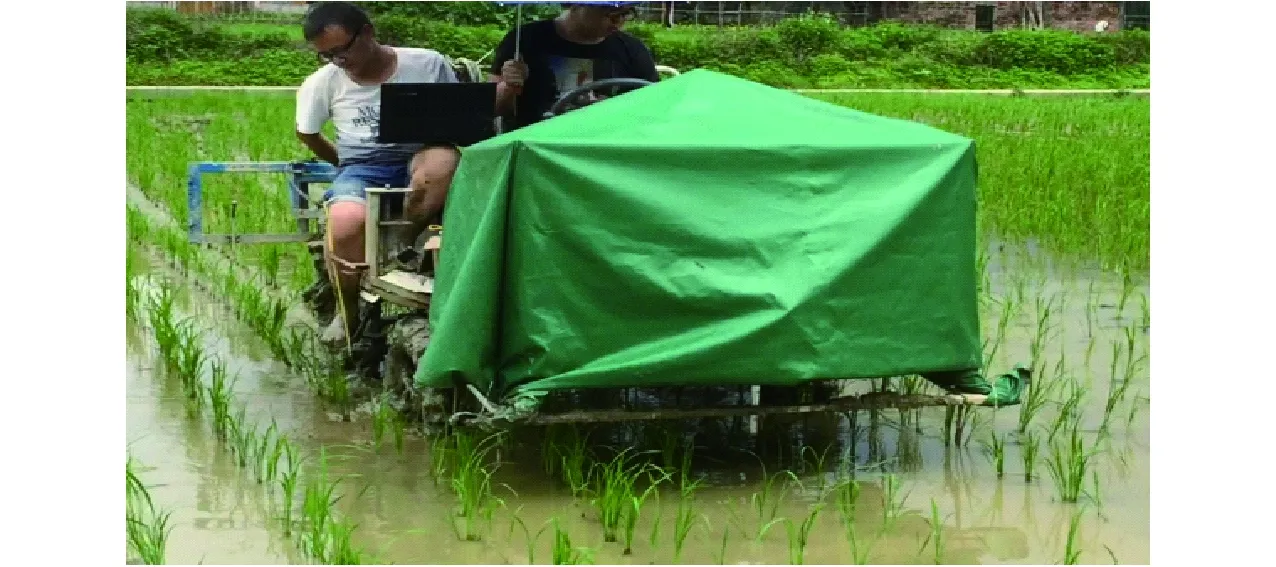
图11 田间测试现场Fig.11 Experiment in paddy field
供试稻苗为五山丝苗,每穴苗数平均5株,稻田水层厚度约为2 cm。在水稻插秧后10 d、15 d、20 d时采集图像,分别采集有水、无水条件下图像样本各50幅,共300幅稻株茎基部图像样本用于方法验证。
稻株中心标定是判断定位是否准确的关键。本研究通过人工标定得到像素坐标下稻株中心的精确坐标。图像采集前,在稻株茎基部中间插入一根黑色标杆,如图12a所示。图像二值化后,检测并拟合该标杆的边缘成线段,计算两侧边缘线段中点坐标均值作为标定稻株中心。拟合的边线如图12b中红色虚线所示,标定中心如图12b中的点所示,其横坐标显示在图12b右上角。
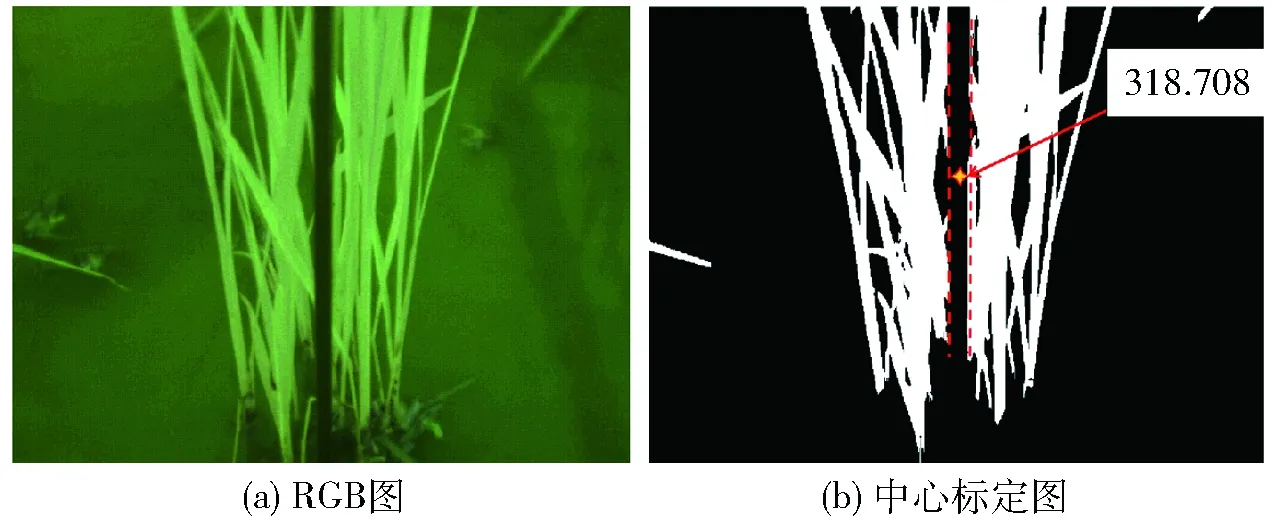
图12 中心线标定Fig.12 Center line calibration
2.1.3 茎基部边缘拟合定位
为验证本文所述分区边缘拟合定位方法的定位精度,分别采用无分区边缘拟合定位方法和本文所述分区边缘拟合的定位方法对稻株进行定位,并将定位中心的横坐标和标定中心的横坐标由像素坐标转换为实际坐标,然后计算定位横坐标的偏移δi。定位误差由均方根误差(RMSE)表示,均方根误差公式为
(6)
式中σ——均方根误差,即定位误差δi——第i幅图像中的定位偏移
稻株定位结果如表2所示。

表2 茎基部定位结果
对比分区边缘拟合与无分区边缘拟合两种定位方法的定位误差发现,分区边缘拟合定位方法的定位精度优于无分区边缘拟合定位方法,说明因稻株茎基部边缘不平滑、茎基部顶端单侧倾斜,无分区边缘拟合定位茎基部中心容易造成较大定位误差。由表2中分区条件下的定位误差可知,在有水或无水条件下,定位误差保持在7.0 mm下,其中插秧后15 d时的定位精度最高。分析原因如下:插秧后10 d时,影响定位误差的主要原因是稻株茎基部未分蘖,部分穴稻株拥有苗数较少(1~3株),穴内稻株的茎基部未能呈现成束的生长状态,由侧面对茎基部进行图像采集,图像中穴内稻株之间存在间隙,图像分割后,稻株茎基部中间存在黑色的背景区域,进行边缘拟合时,此类区域的边缘易被识别为稻株茎基部边缘,从而对边缘拟合造成干扰,影响定位误差;插秧后20 d时,影响定位误差的主要原因是目标行或相邻行稻株冠层长势较好,叶片被采集到图像中,叶片边缘被误识别为稻株茎基部边缘,影响定位误差。
2.2 冠层定位试验与分析
为分析本研究所提出的区间边缘拟合的稻株定位方法,进行了传统的基于植株冠层的定位方法研究[25]。垂直俯拍插秧后10 d、15 d、20 d时的稻株冠层图像,采集环境条件与上述保持一致,每种条件下均采集50幅,共300幅图像样本。进行图像分割后,在二值图像中部采用Blob算法对稻株冠层进行连通区域质心提取,提取结果即为该方法定位的稻株中心。稻株的标定中心采用在稻株中心插入一黑色标杆并计算该标杆圆心的方式得到。该方法的定位结果见表3。

表3 冠层定位结果
由表3可知,在插秧后10~20 d内,随着稻株的生长,Blob算法的定位误差不断增大,其原因是随着稻株的生长,稻株冠层形态更加复杂,生长到一定时期后,相邻稻株叶片接连,影响目标稻株的定位误差。
2.3 茎基部与冠层定位试验对比分析
为更好地对比分析本研究提出的基于稻株茎基部的定位方法与传统的基于稻株冠层的定位方法,定义除草适用期为:该方法在稻苗插秧后,分蘖盛期之前的除草期内,满足定位精度要求的时间段(定位误差小于10 mm)。对比分析分区边缘拟合定位方法与冠层定位方法的定位误差发现,在插秧后10~20 d内,本文所述稻株定位方法的定位误差均低于7.0 mm,而由冠层定位的方法定位误差均高于8.0 mm,且15 d时其定位误差已超过10 mm,由此可见由冠层定位稻株的方法定位误差较大,仅适用于插秧初期(10 d内),除草适用期较短。而本文所述茎基部分区边缘拟合的稻株定位方法,除草适用期较长,定位误差较小,可满足株间除草机械对稻株定位的精度要求。
3 结论
(1)构建了具有遮光功能的图像采集系统,该方法减少了自然光下,亮斑、倒影等因素对稻株定位精度的影响;提出了侧位俯拍的图像采集方式获取稻株茎基部图像并进行定位,探究了侧位俯拍时相机的相关安装参数设定。
(2)提出了基于茎基部分区边缘拟合的稻株定位方法,该方法解决了因稻株茎基部边缘生长姿态不对称、边缘不平滑,无分区边缘拟合的定位方法存在较大误差的问题。该方法综合运用2G-R-B彩色图像灰度化、自动阈值、形态学操作等方法处理并分割稻株图像,在二值图像中划分稻株茎基部拟合区间,并在每个子区间内进行茎基部中点提取,根据中点拟合茎基部中线,以中线的中点作为定位的稻株茎基部中心,进而实现稻株的定位。
(3)进行了田间基于茎基部与冠层的稻株定位对比试验。试验结果表明:在插秧后10~20 d内,基于茎基部的定位误差均保持在7.0 mm以下,10 d、15 d、20 d时的定位误差分别为6.9 mm/6.8 mm、5.9 mm/5.8 mm、6.3 mm/6.5 mm(有水条件/无水条件);基于冠层定位的误差分别为8.2 mm/9.0 mm、11.3 mm/10.7 mm、15.4 mm/16.1 mm(有水条件/无水条件),均在8.0 mm以上,其中插秧20 d后,定位误差达到15 mm以上。试验结果表明:本研究所提出稻株定位方法的定位误差优于传统的基于冠层的定位方法,适用于水稻插秧后10~20 d的除草期,满足株间除草机械除草期内对稻株定位的精度要求。
1 马旭,齐龙,梁柏, 等.水稻田间机械除草装备与技术研究现状及发展趋势[J].农业工程学报,2011,27(6):162-168. MA Xu, QI Long, LIANG Bai, et al. Present status and prospects of mechanical weeding equipment and technology in paddy field[J].Transactions of the CSAE, 2011, 27(6): 162-168. (in Chinese)
2 TILLETT N D, HAGUE T, GRUNDY A C, et al. Mechanical within-row weed control for transplanted crops using computer vision[J].Biosystems Engineering, 2008, 99(2): 171-178.
3 ASTRAND B, BAERVELDT A J. An agricultural mobile robot with vision-based perception for mechanical weed control[J].Autonomous Robots, 2002, 13(1): 21-35.
4 翟志强,朱忠祥,杜岳峰,等. 基于Census变换的双目视觉作物行识别方法[J]. 农业工程学报,2016,32(11):205-213. ZHAI Zhiqiang, ZHU Zhongxiang, DU Yuefeng, et al. Method for detecting crop rows based on binocular vision with Census transformation[J].Transactions of the CSAE, 2016, 32(11): 205-213.(in Chinese)
5 胡炼,罗锡文,曾山,等. 基于机器视觉的株间机械除草装置的作物识别与定位方法[J].农业工程学报, 2013, 29(10): 12-18. HU Lian, LUO Xiwen, ZENG Shan, et al. Plant recognition and localization for intra-row mechanical weeding device based on machine vision[J].Transactions of the CSAE, 2013, 29(10): 12-18. (in Chinese)
6 NAKARMI A D, TANG L. Automatic inter-plant spacing sensing at early growth stages using a 3D vision sensor[J].Computers and Electronics in Agriculture, 2012,82:23-31.
7 KURTULMUS F, KAVDIR I. Detecting corn tassels using computer vision and support vector machines[J].Expert Systems with Applications, 2014, 41(16):7390-7397.
8 CHOI K H, HAN S K, HAN S H, et al. Morphology-based guidance line extraction for an autonomous weeding robot in paddy fields[J].Computers and Electronics in Agriculture,2015,113:266-274.
9 车佳斯. 零件圆度与圆柱度的图像测量研究[D].长春:吉林大学,2007. CHE Jiasi. Research of the mechanical part roundness error and cylindricity error based on the image measurement technology[D]. Changchun: Jilin University, 2007.(in Chinese)
10 戚玮玮. 光照变化条件下中型组足球机器人目标识别与定位方法研究[D].青岛:中国海洋大学,2011. QI Weiwei. Research onobject recognition and localization for middle size league soccer robot under variant illumination[D]. Qingdao: Ocean University of China,2011.(in Chinese)
11 毛文华,张银桥,王辉,等.杂草信息实时获取技术与设备研究进展[J/OL].农业机械学报, 2013,44(1):190-195. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20130136&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2013.01.036. MAO Wenhua, ZHANG Yinqiao, WANG Hui, et al. Advance techniques and equipments for real-time weed detection[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2013,44(1):190-195.(in Chinese)
12 张勤,黄小刚,李彬. 基于彩色模型和近邻法聚类的水田秧苗列中心线检测方法[J].农业工程学报,2012,28(17):163-171,295-296. ZHANG Qin, HUANG Xiaogang, LI Bin. Detection of rice seedlings rows’ centerlines based on color model and nearest neighbor clustering algorithm[J].Transactions of the CSAE, 2012, 28(17): 163-171,295-296. (in Chinese)
13 MIDTIBY H S, MATHIASSEN S K, ANDERSSONK J, et al. Performance evaluation of a crop/weed discriminating microsprayer[J].Computers and Electronics in Agriculture, 2011,77(1):35-40.
14 张铮,王艳平,薛桂香. 数字图像处理与机器视觉-VisualC++与Matlab实现[M].北京:人民邮电出版社,2010.
15 陈娇,姜国权,杜尚丰, 等.基于垄线平行特征的视觉导航多垄线识别[J].农业工程学报, 2009, 25(12): 107-113. CHEN Jiao, JIANG Guoquan, DU Shangfeng, et al. Crop rows detection based on parallel characteristic of crop rows using visual navigation[J].Transaction of the CSAE, 2009,25(12): 107-113. (in Chinese)16 曹倩,王库,李寒. 基于机器视觉的旱田多目标直线检测方法[J].农业工程学报, 2010, 26(增刊1): 187-191. CAO Qian, WANG Ku, LI Han. Detection algorithm for crop target multi-lines of the field image based on machine vision[J].Transactions of the CSAE,2010, 26(Supp.1): 187-191. (in Chinese)
17 项荣,应义斌,蒋焕煜. 田间环境下果蔬采摘快速识别与定位方法研究进展[J/OL].农业机械学报,2013,44(11):208-223. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20131137&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2013.11.037. XIANG Rong, YING Yibin, JIANG Huanyu. Development of real-time recognition and localization methods for fruits and vegetables in field[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2013,44(11):208-223.(in Chinese)
18 胡炼,罗锡文,张智刚,等. 株间除草装置横向偏移量识别与作物行跟踪控制[J].农业工程学报,2013,29(14):8-14. HU Lian, LUO Xiwen, ZHANG Zhigang, et al. Side-shift offset identification and control of crop row tracking for intra-row mechanical weeding[J].Transactions of the CSAE,2013, 29(14): 8-14. (in Chinese)
19 毛文华,王辉,赵博,等. 基于株心颜色的玉米田间杂草识别方法[J].农业工程学报,2009,25(增刊2):161-164. MAO Wenhua, WANG Hui, ZHAO Bo, et al. Weed detection method based the centre color of corn seedling[J].Transactions of the CSAE, 2009,25(Supp.2): 161-164.(in Chinese)
20 徐建华. 图像处理与分析[M].北京:科学出版社,1992.
21 段瑞玲,李庆祥,李玉和. 图像边缘检测方法研究综述[J].光学技术,2005,31(3):415-419. DUAN Ruiling, LI Qingxiang, LI Yuhe. Summary of image edge detection[J].Optical Technique, 2005,31(3):415-419.(in Chinese)
22 高国琴,李明. 基于K-means算法的温室移动机器人导航路径识别[J].农业工程学报,2014,30(7):25-33. GAO Guoqin, LI Ming. Navigating path recognition for greenhouse mobile robot based on K-means algorithm[J].Transactions of the CSAE,2014,30(7):25-33. (in Chinese)
23 吴露露,马旭,齐龙,等. 改进Hough变换的农作-物病斑目标检测方法[J].农业工程学报,2014,30(10):152-159. WU Lulu, MA Xu, QI Long, et al. A method of target detection for crop disease spots by improved Hough transform[J].Transactions of the CSAE, 2014, 30(10): 152-159. (in Chinese)
24 侯学贵,陈勇,郭伟斌. 除草机器人田间机器视觉导航[J].农业机械学报,2008,39(3):106-108,112. HOU Xuegui, CHEN Yong, GUO Weibin. Machine vision-based navigation for a weeding robot[J].Transactions of the Chinese Society for Agricultural Machinery,2008,39(3):106-108,112.(in Chinese)
25 JIANG Yu, CUI Hongwei, QI Long, et al. Recognition and positioning method of rice seedlings based on machine vision[J].International Journal of Signal Processing, Image Processing and Pattern Recognition, 2016,9(9):265-278.
Positioning Method of Rice Seedlings Based on Edge Fitting in Separated Region of Stem Base
JIANG Yu1,2CUI Hongwei1OU Yinggang1MA Xu1,3QI Long1,3ZHENG Wenhan1
(1.CollegeofEngineering,SouthChinaAgriculturalUniversity,Guangzhou510642,China2.ModernEducationalTechnologyCenter,SouthChinaAgriculturalUniversity,Guangzhou510642,China3.SouthernRegionalCollaborativeInnovationCenterforGrainandOilCropsinChina,Changsha410128,China)
Positioning of rice seedlings is an important step of mechanical intra-row weeding. Aiming to minimize the positioning errors based on canopy of rice, a system that could capture RGB images of rice stem base on the side view was built to position the rice seedlings according to edge fitting in separated region of the stem base. Firstly, relevant factors, including the morphology of rice seedlings, the installation parameters of camera on the side-view and affecting image quality were analyzed, and a method of grabbing image under shading conditions was proposed, contributing to a system with shading device. The original RGB images were distinguished from soil by analyzing the excessive green (2G-R-B) rice seedlings index images. The Otsu algorithm method was employed to transform a gray image to a binary image, and then the binary images were smoothed by morphological operation to remove noise for subsequent analysis. After that the edges of stem base were extracted by the Canny operator, and the fitting region of edges was set up. A method was presented in fitting region based on edge fitting in non-separated region of the stem base. However, the results showed that this positioning method was not accurate because of effect of unsmooth and unilateral sloping edges of stem base. Therefore, the fitting region was separated into three subintervals where the edges of stem base were fitted by the Hough transform. The center of rice seedlings was gained by the center coordinates of the mid-line fitted by the mean of midpoint coordinates of fitting edges. The positioning experiments of rice seedlings in terms of stem base and the canopy were carried out respectively. The results of positioning based on stem base showed that the positioning errors were less than 7.0 mm, and the positioning errors were 6.9 mm, 5.9 mm and 6.3 mm under the condition of including water and 6.8 mm, 5.8 mm and 6.5 mm under the anhydrous condition on the 10th, 15th and 20th day after transplanting, respectively. The results of positioning based on canopy showed that the positioning errors were above 8.0 mm, and the positioning errors were 8.2 mm, 11.3 mm and 15.4 mm under the condition of including water and 9.0 mm, 10.7 mm and 16.1 mm under the anhydrous condition on the 10th, 15th and 20th day after transplanting, respectively. The results suggested that the innovative positioning method that based on edge fitting in separated region of the stem base of rice seedlings met the technical requirement of mechanical weeding in terms of high precision and long applicable period.
rice seedlings; mechanical weeding; intra-row weeding; positioning; stem base
10.6041/j.issn.1000-1298.2017.06.003
2017-01-10
2017-04-02
国家自然科学基金项目(51575195)、广东省自然科学基金项目(2015A030313402)、广东省科技计划重点项目(2014B020207003)、现代农业产业技术体系建设专项资金项目(CARS-01-33)、广东省科技计划项目(2014A020208112)和广州市珠江科技新星专项(2014J2200041)
蒋郁(1983—),女,博士生,实验师,主要从事图像与信息处理研究,E-mail: nova_yy@scau.edu.cn
区颖刚(1947—),男,教授,博士生导师,主要从事农业机械设计研究,E-mail: ouying@scau.edu.cn
S224.1+5; TP391.4
A
1000-1298(2017)06-0023-09
猜你喜欢
作物杂志(2022年3期)2022-07-06
中国农业信息(2022年1期)2022-05-25
特种经济动植物(2021年12期)2021-12-13
农业机械学报(2021年11期)2021-12-07
农业机械学报(2020年2期)2020-03-09
椰城(2018年9期)2018-11-15
种业导刊(2018年9期)2018-01-16
热带农业科学(2017年9期)2017-10-23
——一种分层模拟的方法
自然资源遥感(2017年2期)2017-04-27
农村农业农民·B版(2016年7期)2016-10-21