斜置式非规则齿轮行星轮系扎穴机构工作参数试验优化
2017-06-27 08:12王金武周文琪王金峰张春凤江东璇
农业机械学报 2017年6期
王金武 周文琪 王金峰 张春凤 江东璇
(1.东北农业大学工程学院, 哈尔滨 150030; 2.北京农业智能装备技术研究中心, 北京 100097)
斜置式非规则齿轮行星轮系扎穴机构工作参数试验优化
王金武1周文琪1王金峰1张春凤2江东璇1
(1.东北农业大学工程学院, 哈尔滨 150030; 2.北京农业智能装备技术研究中心, 北京 100097)
为探明深施型液态施肥机扎穴机构工作参数对作物损伤率、穴口宽度以及穴距的影响机理,设计了一种斜置式非规则齿轮行星轮系扎穴机构。通过联轴器使扎穴机构满足斜置式扎穴状态,使其扎穴轨迹平面与垄面呈一定角度变化,实现斜入式扎穴。采用二次回归正交旋转组合设计进行最佳工作参数试验,以行星架转速、前进速度和斜置角度为试验影响因素,以穴口宽度、穴距和作物损伤率为优化指标,利用响应曲面方法进行优化,运用Design-Expert 8.0.10软件对试验数据进行分析,得到因素与指标之间的回归方程及响应曲面图。试验结果表明,当行星架转速75.0 r/min、前进速度0.48 m/s、斜置角度23.3°时,穴口宽度为40.2 mm,穴距为220 mm,作物损伤率为0.33%,此时机构性能最优,应用此参数组合进行斜入式扎穴测试验证,验证了其合理性。
深施型液态施肥机; 扎穴机构; 斜入式扎穴; 非规则齿轮; 优化
引言
扎穴机构是深施型液态施肥机的核心工作部件,该机构实现喷肥针入土喷肥的功能,其性能的优劣直接决定了施肥机扎穴喷肥的质量和效率。
目前液态施肥机扎穴机构分为曲柄摇杆式、椭圆-正圆齿轮行星系、全椭圆齿轮行星系以及非圆齿轮行星轮系等。每一种扎穴机构都有不足之处:曲柄摇杆式扎穴机构虽然能满足深施液态肥的功能,但其固有运动惯性力和本身的结构形式使得扎穴次数进一步提高时,振动大大加剧[1-2];椭圆齿轮行星系扎穴机构虽然经过运动学和动力学优化,但只有一个喷肥针工作,效率相对较低[3-4];全椭圆齿轮行星系扎穴机构,虽然扎穴速度高达450次/min,但喷肥针入出土垂直度不够,穴口宽度较大[5-6],非圆齿轮行星轮系扎穴机构虽然扎穴效率以及扎穴效果均明显提高[7-8],但在田间进行扎穴施肥时,由于离作物根区很近,其固有的周转运动对作物造成严重机械损伤,如壳体击打茎叶,喷肥针扎茎叶等,严重影响了作物后期的生长。上述几类扎穴机构均存在对作物造成机械损伤的问题[9-11]。
一种呈斜置形式的扎穴机构可减少作物的损伤率,虽然经过软件优化得到了机构参数,通过高速摄像分析了扎穴轨迹随着斜置角度的变化规律以及在入土与出土过程中喷肥针姿态变化对形成穴口宽度的影响机理。但在实际工作状况下,针对扎穴机构斜置角度、机构转速以及机构前进速度对降低作物损伤率以及得到理想穴距和斜入式较小穴口的多目标问题尚无研究。
因此,为进一步探索斜置角度、行星架转速与前进速度3个工作参数及其之间的相互作用对指标的影响,本文进行机构的二次正交旋转组合设计试验,从整体和相互作用上来定量研究工作参数对多目标的影响。以期揭示参数对目标的影响机理,并通过分析软件优化得到适合田间作业时的机构相应工作参数,为建立具有适应性和高效率的斜置式扎穴机构模型奠定理论基础。
1 结构特点与工作原理
斜置式非规则齿轮行星轮系扎穴机构如图1所示。由于该机构具有对称分布性,以单侧结构进行阐述。斜置式非规则齿轮行星轮系扎穴机构主要由7个不同的非规则齿轮、联轴器、法兰、外接板、行星架、摇臂、喷肥针等部分组成。
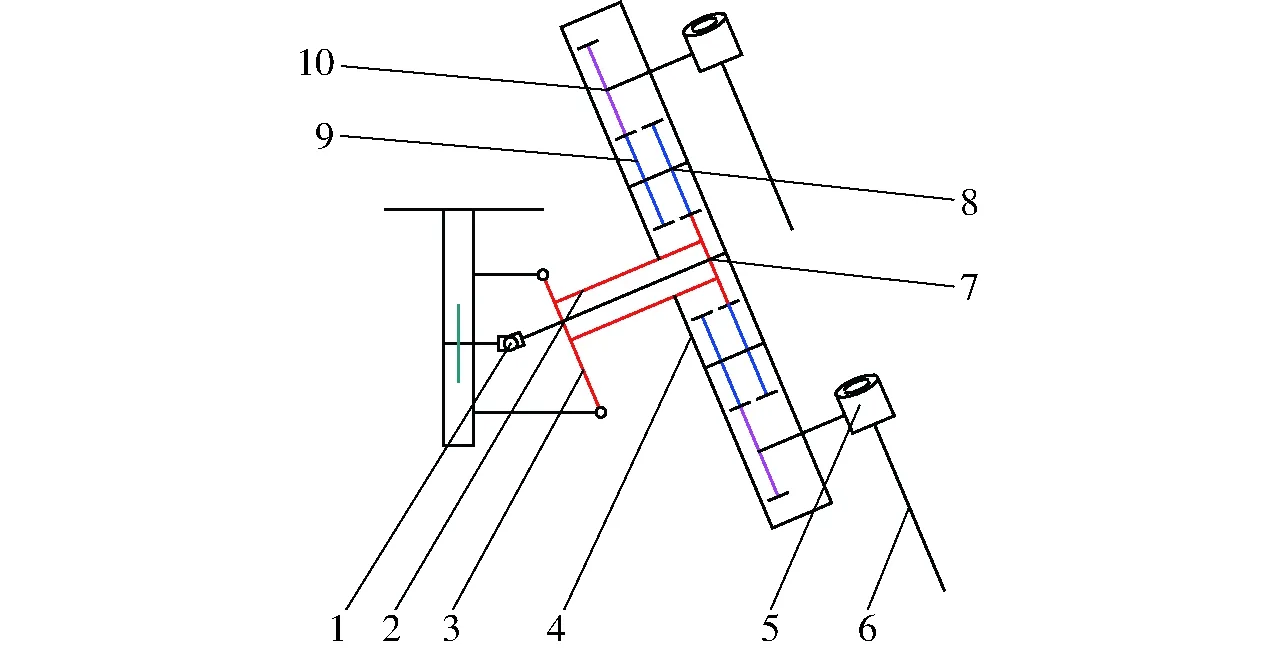
图1 斜置式非规则齿轮行星轮系扎穴机构结构示意图Fig.1 Diagram of pricking hole mechanism with non-circular gears for diagonal1.联轴器 2.法兰 3.外接板 4.行星架 5.摇臂 6.喷肥针7.太阳轮 8.中间轮1 9.中间轮2 10.行星轮
链轮轴与太阳轮轴通过联轴器进行连接,太阳轮轴穿过太阳轮并与行星架通过花键连接,外接板可根据其上的连接孔改变扎穴机构的斜置角度,法兰与外接板固结。行星架里面的非规则齿轮初始安装相位相同,太阳轮与行星架同轴,其他6个非规则齿轮在太阳轮两边呈对称布置(太阳轮与法兰固结)。第1中间轮和第2中间轮同轴且固结在一起,第1中间轮与太阳轮相互啮合,第2中间轮与行星轮相互啮合。摇臂与喷肥针组成的构件固结在行星轮上[12-16](喷肥针尾部固定在摇臂的一端)。
工作时,驱动力驱动链轮轴转动并由联轴器带动太阳轮轴,行星架里面的太阳轮固定不动,当行星架转动时行星轮绕太阳轮公转并与第2中间轮啮合自转,此时第1中间轮与太阳轮啮合,由于联轴器以及外接板可改变喷肥针的扎穴角度且非规则齿轮能实现非匀速比传动,最终形成喷肥针尖的斜入式运动轨迹,保证斜入式的扎穴要求[17-18]。
经前期研究,通过理论分析建立了该机构喷肥针的运动学模型以及形成这种扎穴轨迹的逆向设计思想[19-21],经过软件优化得到了相应的机构参数。但在不同工作参数下多目标影响规律尚未分析。理想的工作参数应是兼顾穴口小、作物损伤率小以及理想穴距的多目标优化。
2 机构工作参数试验
2.1 试验材料
为探索斜置式非规则齿轮行星轮系扎穴机构行星架转速、前进速度以及斜置角度对扎穴以及作物损伤的影响规律,得到其最佳工作参数,本研究在东北农业大学工程学院农具实验室进行台架试验。依据中耕时期的土壤状况要求,调整土壤硬度范围为0.6~1.0 MPa,含水率为15%~25%。试验作物为中耕时期玉米,品种为东农253,植株高115 cm,叶子外展96 cm,主根长10 cm,宽7 cm,叶数7~9叶。斜置式非规则齿轮行星轮系扎穴机构试验台如图2所示。

图2 斜置式非规则齿轮行星轮系扎穴机构试验台Fig.2 Test-bed of non-circular planetary gear trains pricking hole mechanism for diagonal1.电动机a 2.电动机b 3.试验台车 4.扎穴机构 5.变频柜6.玉米植株 7.垄
将玉米作物根据田间实际种植状况栽到垄面上,垄行根据机构斜置角度在横向与纵向可调,其目的为了满足深施肥农艺要求的“侧5 cm、深8 cm”,电动机a和电动机b均由变频柜控制。电动机控制试验台车在土槽导轨上往复运动(扎穴机构前进速度),电动机b通过链条传动控制扎穴机构转动(行星架转速)。当电动机a和电动机b同步进行工作时,即合成了扎穴机构的绝对运动。
2.2 试验方案设计
行星架转速和前进速度是影响喷肥针扎穴的重要因素,同时斜置角度的变化对作物损伤有着重要的影响。因此选取行星架转速、前进速度和斜置角度为试验影响因素。根据农艺要求,穴口宽度越小越好,穴距为标准220 mm,作物的损伤株数与总株数的百分比作为作物损伤率(包括行星架部件打掉叶子和喷肥针扎叶、茎受到的不同程度损伤)。因此将穴口宽度、穴距与作物损伤率作为评价指标,选取二次回归正交旋转组合设计试验方案。
2.3 试验结果与分析
首先对扎穴机构行星架转速、前进速度与斜置角度进行单因素预备试验,以确定各因素合理的变化范围,试验因素编码如表1所示。
根据二次回归正交旋转组合设计23组试验,试验方案与结果见表2。其中y1为穴口宽度,y2为穴距,y3为作物损伤率。
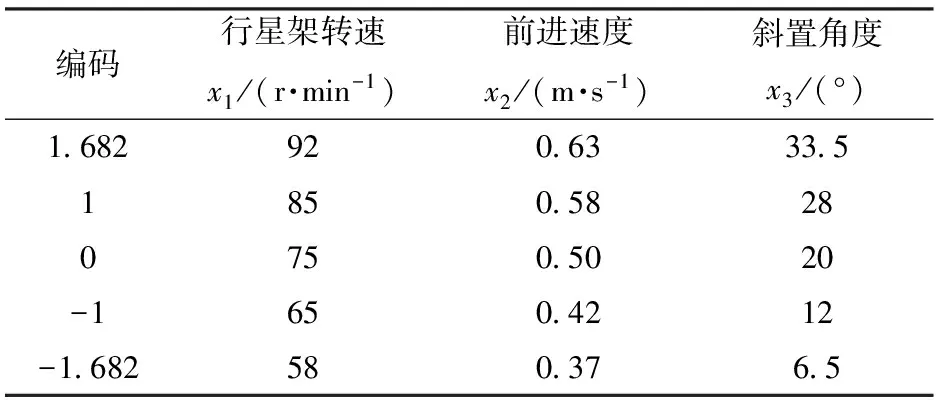
表1 试验因素编码
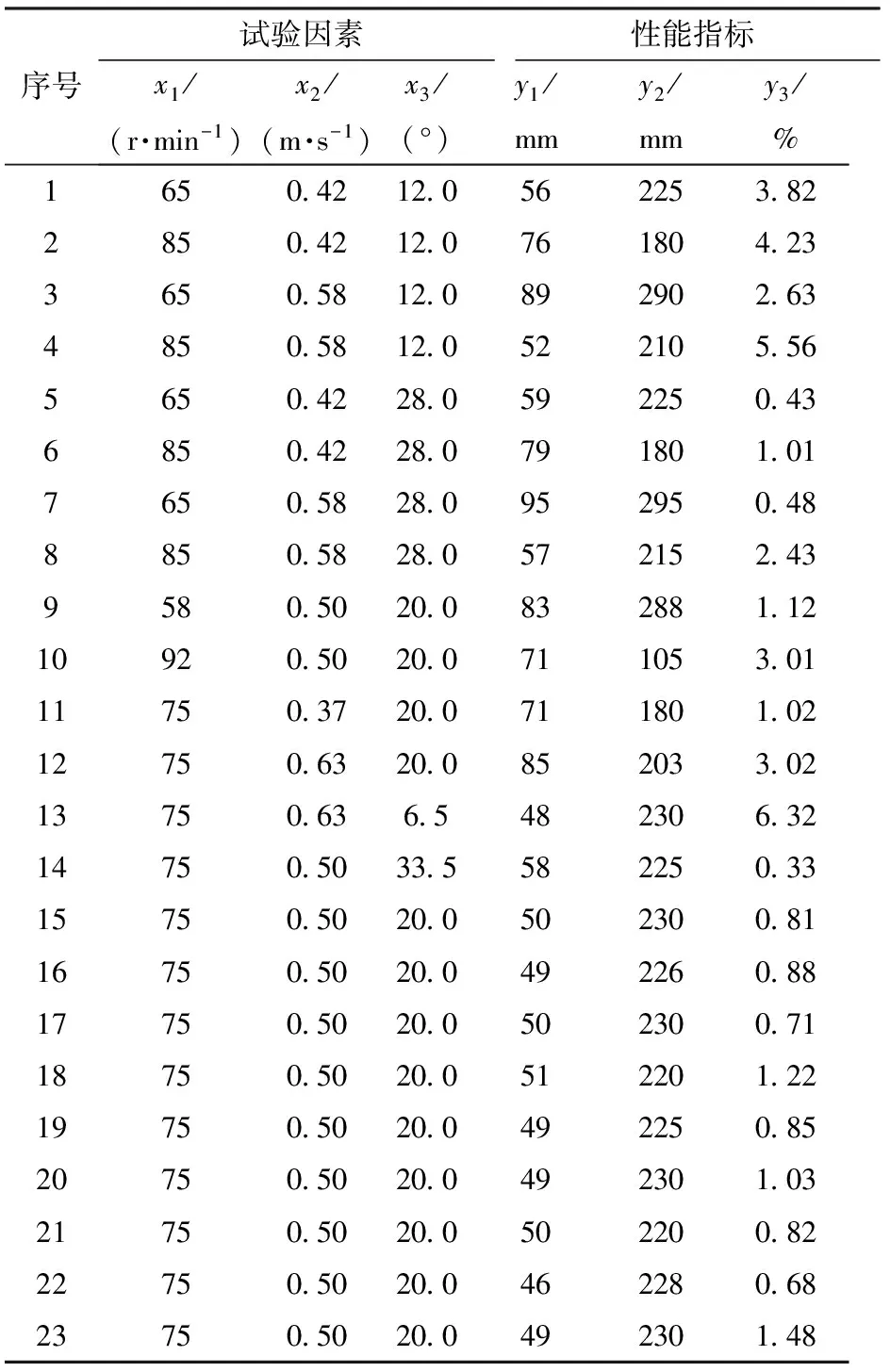
表2 试验方案与结果
通过Design-Expert 8.0.10软件对试验数据进行回归分析,筛选出显著的影响因素,得到相应的回归方程
响应曲面图如图3所示。

图3 响应曲面Fig.3 Response surfaces
对上述回归方程与响应曲面进行分析可知,行星架转速与前进速度的交互作用对穴口、穴距以及作物损伤率影响显著。如图3a所示,当行星架转速较小时,穴口宽度随着前进速度的增加先减小后增大;当行星架转速较大时,穴口宽度随前进速度的增大先减小后增大;当前进速度较小时,穴口宽度随着行星架转速的增大而先减小后增大,当前进速度较大时,穴口宽度随着行星架转速的增加而减小。由上述规律分析可知,在喷肥针入出土过程中,其水平分速度与前进速度大小接近且方向相反时,穴口宽度能达到最小。如图3b所示,当行星架转速一定时,穴距随着前进速度的增大而增大,当前进速度一定时,穴距随着行星架转速的提高而减小。如图3c所示,当行星架转速较小时,作物损伤率随着前进速度的增大而先减小后增大,当行星架转速较大时,作物损伤率随着前进速度的增大而增大,当前进速度较小时,作物损伤率随着行星架转速提高而先减小后增大,当前进速度较大时,作物损伤率随着行星架转速的提高而增大。由上述规律可知,在行星架转速与玉米作物接触的过程中,当相对速度较小时,此时的玉米作物损伤率较小。
3 最佳工作参数试验
为得到试验因素的最优组合,应用Design-Expert 8.0.10的曲面优化功能对穴口宽度、穴距与作物损伤率进行优化。当行星架转速75.0 r/min,
前进速度0.48 m/s、斜置角度23.3°时,扎穴机构性能最优,穴口宽度40.2 mm,穴距220 mm,作物损伤率0.33%。根据优化结果对其进一步进行台架试验验证,得到穴口宽度41.5 mm,穴距220 mm,作物损伤率0.32%,验证结果与Design-Expert 8.0.10优化结果基本一致,其误差主要为试验过程中土壤环境与理想状态有一定的差距,但可满足不损伤作物的扎穴要求。
4 结论
(1)采用二次回归正交旋转组合设计方案进行试验安排,获得了优化目标与3个因素之间的回归方程以及因素之间交互作用的响应曲面,对其结果进行分析,得到因素对影响指标的变化规律为:①喷肥针在入出土过程中,其相对水平分速度与前进速度大小接近且方向相反时,穴口宽度最小。②在机组前进速度一定,行星架转速增大时,穴距减小;在行星架转速一定时,机组前进速度增大时,穴距增大。③在扎穴机构与玉米作物接触的过程中,两者相对速度较小时,作物的损伤率小。
(2)运用Design-Expert 8.0.10 软件对回归模型进行优化、验证,在行星架转速75.0 r/min、前进速度0.48 m/s、斜置角度23.3°时得到最优组合,此时穴口宽度40.2 mm,穴距220 mm,作物损伤率0.33%。
1 王金武,纪文义,冯金龙,等.液态施肥机的设计与试验研究[J].农业工程学报,2008,24(6):157-159. WANG Jinwu, JI Wenyi, FENG Jinlong,et al. Design and experimental investigation of the liquid fertilizer applicator[J]. Transactions of the CSAE,2008,24(6): 157-159.(in Chinese)
2 WOMAC A R, TOMPKINS F D. Probe-type injector for fluid fertilizers[J]. Applied Engineering in Agriculture,1990,6(2):149-154.
3 王金峰,王金武,葛宜元,等.深施型液态施肥机扎穴机构优化设计[J].农业机械学报,2010,41(6):52-56. WANG Jinfeng, WANG Jinwu, GE Yiyuan,et al. Optimization design on pricking hole mechanism of deep-fertilization liquid fertilizer applicator[J]. Transactions of the Chinese Society for Agricultural Machinery,2010,41(6): 52-56.(in Chinese)
4 CHEN Y. A liquid manure injection tool adapted to different soil conditions[J]. Transactions of the ASAE,2002,45(6):1729-1736.
5 王金武,刘亚华,王金峰,等.全椭圆齿轮行星系液态肥深施机构优化设计与试验[J/OL].农业机械学报,2012,43(10):59-65. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20121011&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2012.10.011. WANG Jinwu, LIU Yahua, WANG Jinfeng,et al. Optimized design and experimental of the liquid fertilizer deep mechanism with planetary elliptic gears[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2012,43(10):59-65.(in Chinese)
6 王金峰,王金武,鞠金艳,等.深施型液态施肥机扎穴机构研究进展[J].东北农业大学学报,2013,44(5):157-160. WANG Jinfeng, WANG Jinwu, JU Jinyan,et al. Research progress on pricking hole mechanism of deep-fertilization liquid fertilizer applicator[J]. Journal of Northeast Agricultural University, 2013, 44(5): 157-160. (in Chinese)
7 刘春香,王金武,周文琪,等.液肥深施双斜孔式喷肥针动力学分析与试验[J/OL].农业机械学报,2016,47(3):54-58.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_ no=20160308& journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2016.03.008. LIU Chunxiang, WANG Jinwu, ZHOU Wenqi,et al. Dynamics analysis and experiment of double oblique hole spray fertilizer needle of liquid fertilizer deep-fertilization[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2016,47(3):54-58.(in Chinese)
8 刘春香,王金武,唐汉,等.基于贝塞尔曲线的液肥扎穴机构动力学分析与试验[J/OL].农业机械学报,2016,47(5):116-122. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160516&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2016.05.016. LIU Chunxiang, WANG Jinwu,TANG Han, et al. Dynamics analysis and test on picking hole mechanism of liquid fertilizer based on bezier curve[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2016,47(5):116-122.(in Chinese)
9 张春凤.非圆齿轮行星系扎穴机构的反求设计与仿真[D].哈尔滨:东北农业大学,2014. ZHANG Chunfeng. Reverse design and kinematic analysis of non-circular planetary gear trains pricking hole mechanism[D]. Harbin:Northeast Agricultural University,2014. (in Chinese)
10 王金武,周文琪,张春凤,等.非规则齿轮行星系扎穴机构反求设计与试验[J/OL].农业机械学报,2015, 46(11):70-75.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20151111&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2015.11.011. WANG Jinwu,ZHOU Wenqi,ZHANG Chunfeng,et al. Reverse design and experiment of non-circular gear planetary system picking hole mechanism[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015,46(11):70-75.(in Chinese)
11 郗晓焕,王金武,郎春玲,等.液态施肥机椭圆齿轮扎穴机构优化设计与仿真[J].农业机械学报,2011,42(2):81-83. XI Xiaohuan, WANG Jinwu, LANG Chunling,et al. Optimal design and simulation on pricking hole mechanism of liquid fertilizer applicator[J]. Transactions of the Chinese Society for Agricultural Machinery,2011,42(2):81-83.(in Chinese)
12 张允慧,迟立军,赵匀,等.斜齿外啮倾斜式宽窄行插秧机分插机构的设计[J].农业工程学报,2012,28(7):8-12. ZHANG Yunhui, CHI Lijun, ZHAO Yun,et al. Design of narrow-wild rice transplanting mechanism with external helical gear transmission[J]. Transactions of the Chinese Society of Agricultural Engineering, 2012, 28(7): 8-12. (in Chinese)
13 陈建能,黄前泽,王英,等.钵苗移栽机椭圆齿轮行星系植苗机构运动学建模与分析[J].农业工程学报,2012,28(5):6-12. CHEN Jianneng, HUANG Qianze, WANG Ying, et al. Kinematics modeling and analysis of transplanting mechanism with planetary elliptic gears for pot seedling transplanter[J]. Transactions of the CSAE, 2012, 28(5): 6-12. (in Chinese)
14 EDATHIPARAMBI H V. Development of a mechanism for transplanting rice seedlings[J]. Mechanism and Machine Theory,2002,37(4):395-410.
15 俞高红,钱孟波,赵云,等.偏心齿轮-非圆齿轮行星系分插机构运动机理分析[J].农业机械学报,2009,40(3):82-84. YU Gaohong, QIAN Mengbo, ZHAO Yun, et al. Analysis of kinematic principle of transplanting mechanism with eccentric gears and non-circular gears[J]. Transactions of the Chinese Society for Agricultural Machinery, 2009, 40(3):82-84.(in Chinese)
16 俞高红,赵凤芹,武传宇,等.正齿行星轮分插机构的运动特性分析[J].农业机械学报,2004,35(6):55-57. YU Gaohong, ZHAO Fengqin, WU Chuanyu, et al. Analysis of kinematic property of separating-planting mechanism with planetary gears[J]. Transactions of the Chinese Society for Agricultural Machinery,2004,35(6):55-57.(in Chinese)
17 赵雄,陈建能,王英,等.水稻钵苗“D 形”静轨迹移栽机构逆向设计与分析[J].农业工程学报,2012,28(8):92-97. ZHAO Xiong, CHEN Jianneng, WANG Ying, et al. Reverse design and analysis of rice seedling transplanter with D-shape static trajectory[J]. Transactions of the CSAE,2012, 28(8): 92-97. (in Chinese)
18 李革,应孔月,张继钊,等.基于秧针静轨迹的分插机构非圆齿轮求解[J].机械工程学报,2016,52(1):64-71. LI Ge,YING Kongyue, ZHANG Jizhao, et al. Computation method of non-circular gear based on seedling needle tip point’s static trajectory in transplanting mechanism[J]. Journal of Mechanical Engineering, 2016,52(1):64-71.(in Chinese)
19 任根勇.剑杆织机非圆齿轮行星轮系引纬机构的反求设计与仿真分析[D].杭州:浙江理工大学,2011. REN Genyong. Reverse design and simulation analysis of the planetary non-circular gears trains weft insertion mechanism applied on rapier loom[D]. Hangzhou:Zhejiang Sci-Tech University, 2011. (in Chinese)
20 武传宇,赵匀,陈建能.水稻插秧机分插机构人机交互可视化优化设计[J].农业机械学报,2008,39(1):47-49. WU Chuanyu, ZHAO Yun, CHEN Jianneng. Optimization design of rice transplanter separating planting mechanism with visualization human computer interaction method[J]. Transactions of the Chinese Society for Agricultural Machinery,2008,39(1):47-49.(in Chinese)
21 王金武,张春凤,周文琪,等.基于MATLAB仿真的非规则齿轮行星系扎穴机构的优化设计[J].农业工程学报,2016,32(3):22-28. WANG Jinwu, ZHANG Chunfeng, ZHOU Wenqi, et al. Optimization design of non-circular planetary gear trains pricking hole mechanism based on MATLAB[J]. Transactions of the CSAE, 2016, 32(3): 22-28. (in Chinese)
Experiment and Optimization of Working Parameters for Pricking Hole Mechanism of Oblique Type Non-circular Gears Planetary System
WANG Jinwu1ZHOU Wenqi1WANG Jinfeng1ZHANG Chunfeng2JIANG Dongxuan1
(1.CollegeofEngineering,NortheastAgriculturalUniversity,Harbin150030,China2.BeijingResearchCenterforIntelligentAgriculturalEquipment,Beijing100097,China)
Deep-fertilization liquid fertilizer applicator with high efficiency, low price, easy operation and environment protection attracts more and more concerns, which can decrease fertilizer volatilization and increase crop yield and quality. Aiming to explore the influence mechanism that working parameters of pricking hole mechanism with crop damage rate,hole size and hole distance, a new type of non-circular gears planetary system of pricking hole mechanism for oblique type of liquid fertilizer applicator for deep-into type was designed. Through coupling part let pricking hole mechanism meet prick hole condition for oblique type, to make the trajectory of pricking hole mechanism side and ridge side reach the changes of different angles, it was achieved to prick hole for oblique type based on the above conditions. Kinematics model was set up, the influence relationship was obtained between the goals and working parameters. Test-bed experiment of working parameters was carried out. The design of quadratic regression rotational quadratic orthogonal experiment was used, with the speed of planet frame, the forward speed and oblique angle as the test factors, the hole mouth width, the hole distance and the rate of crop damage as the test optimization index. The optimization of response surface method was used. Experimental data was analyzed by Design-Expert software so as to establish the regression equation and obtain the diagram of response surface. Test results showed that when the speed of planet frame was 75.0 r/min, the forward speed was 0.48 m/s and the oblique angle was 23.3°, the hole mouth width was 40.2 mm, hole distance was 220 mm and rate of crop damage was 0.33%, the performance of mechanism was optimal under above conditions. The test was verified by applying these parameters to validate its rationality.
liquid fertilizer applicator for deep-into type; pricking hole mechanism; pricking hole for oblique type; non-circular gear; optimization
10.6041/j.issn.1000-1298.2017.06.008
2016-09-06
2016-09-30
国家自然科学基金项目(51675093)和东北农业大学青年才俊项目(14QC34)
王金武(1968—),男,教授,博士生导师,主要从事田间机械及机械可靠性研究,E-mail: jinwuw@163.com
王金峰(1981—),男,副教授,主要从事田间机械研究,E-mail: jinfengw@126.com
S224.21
A
1000-1298(2017)06-0066-05
猜你喜欢
内燃机工程(2021年6期)2021-12-10
科学与生活(2021年27期)2021-01-11
百科探秘·航空航天(2020年6期)2020-07-09
农业科技与信息(2020年9期)2020-07-03
少儿科学周刊·少年版(2020年9期)2020-03-04
少儿科学周刊·少年版(2020年9期)2020-03-04
中学生数理化·八年级物理人教版(2019年5期)2019-06-25
上海农业科技(2019年1期)2019-02-22
读者(2018年20期)2018-09-27
上海农业科技(2017年4期)2017-08-30