3SCJ-2型水田行间除草机设计与试验
2017-06-27 08:12王金峰王金武闫东伟周文琪
农业机械学报 2017年6期
王金峰 王金武 闫东伟 唐 汉 周文琪
(东北农业大学工程学院, 哈尔滨 150030)
3SCJ-2型水田行间除草机设计与试验
王金峰 王金武 闫东伟 唐 汉 周文琪
(东北农业大学工程学院, 哈尔滨 150030)
为减少除草剂对稻米品质的影响和解决人工除草劳动强度大的问题,设计了一种水田行间除草机。除草机采用主、被动除草轮旋转将杂草埋压和挑出。建立关键部件结构模型,通过对水稻秧苗和杂草根系特点进行分析,得出主动除草轮半径、宽度、转速、耙齿等结构参数的计算公式,得出被动除草轮和限深板结构参数的设计依据;建立主动除草轮、被动除草轮、机架和限深板的力学模型,推导出主动除草轮的驱动力矩。根据结构模型、力学模型的分析结果和农艺技术指标要求,确定了主动除草轮半径为0.15 m,被动除草轮半径为0.1 m,主动除草轮转速为0.6 r/s,耙齿数量为6,耙齿长度为0.12 m,驱动力矩为27 N·m。 对设计的水田行间除草机进行田间试验和性能检测,结果表明,除草率为78%,达到农艺技术指标的要求。
水田; 行间除草机; 除草轮; 设计; 试验
引言
在水稻种植过程中,减少除草剂和农药的使用量,是提高水稻品质和保证水稻安全的主要途径。为减少除草剂的使用,采用机械除草是最省时省力的方式[1]。
对于机械除草技术的研究,日本处于领先水平,除草机具可分为乘坐式和步进式:乘坐式除草机工作时通过动力驱动高速转动的耘锄或耙齿除去行间杂草,沿机具前进方向左右摆动的梳齿或驱动对转的株间除草器除去株间杂草;步进式除草机通过行走轮或行间随动除草轮除去行间杂草,通过株间对转式除草器完成株间杂草的去除工作[2-8]。中国在机械除草方面起步较晚,东北农业大学研制并通过行间随动除草辊除去行间杂草,驱动钢丝软轴带动弹齿爪盘除去株间杂草的除草机[9]。华南农业大学研制了靠耙齿式除草轮的高速旋转除掉行间杂草的除草机[10-11]。目前,中国的一些中小企业也进行除草机的研制,主要形式是驱动行走除草轮除去行间杂草,但除草效果并不理想。
中国和日本的土质不同,中国不同省份和地区的土质差别也很大[12],另外,中国水田边缘处不具有除草机转向的区域,日本的乘坐式除草机和宽幅步进式除草机在转向时会出现不同程度的压苗现象,因此,日本的水田除草机并不适合在中国各地区作业,而结构紧凑、质量轻的单行和双行除草机更适合在中国作业。随着优质米需求量的日益增加,水稻种植户对水田除草机的需求也增加,亟需研制适合中国不同地区和不同土壤作业的水田除草机具[13]。本文以黑龙江省黑土为作业对象,进行水田除草机主要参数的确定,设计适合黑龙江省作业的除草机具。
1 除草的农艺要求
黑龙江省种植水稻为一季稻,根据积温不同,种植时间略有不同。第三、四积温带在5月10日左右,气温12℃以上时进行插秧,插秧后返青期长,可在插秧后10~20 d进行除草作业;第一、二积温带可在5月中下旬,气温15℃以上时进行插秧,插秧后气温高,光照足,杂草生长迅速,最佳除草时间为插秧后7~20 d。除草时,泥土深度0.18~0.20 m,返青后控水,泥浆层深度0.02~0.05 m,水稻行间间距0.3 m,株间间距0.12 m,行间除草作业速度低于0.67 m/s,除草率大于75%[14]。
2 整机结构与工作原理
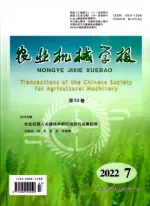
双行水田除草机是一种专门用于水田行间除草作业的轻简化农业机械,结构紧凑,质量轻,可以单手拉起,主要由发动机、主变速箱、侧传动箱、主动除草轮、被动除草轮、限深板和机架等组成。其中主动除草轮和被动除草轮为主要工作部件,结构如图1所示。
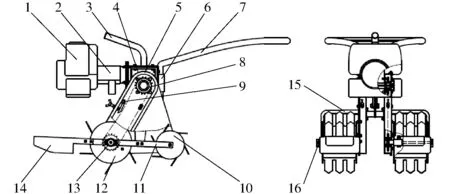
图1 双行水田除草机结构简图Fig.1 Structure diagram of double row weeding machine for paddy field1.发动机 2.发动机变速箱 3.提拉手柄 4.主变速箱 5.侧传动箱 6.机架 7.扶手 8.上链轮 9.张紧机构 10.被动除草轮 11.连接板 12.主动除草轮 13.下链轮 14.限深板 15.支撑板 16.菱形轴承座
发动机和发动机变速箱与主变速箱连接,主变速箱的左右两侧分别安装侧传动箱,侧传动箱由等齿数的上链轮和下链轮通过链条构成。主动除草轮一端与下链轮轮轴通过螺栓连接,另一端与菱形轴承座铰接,菱形轴承座安装在连接板上,连接板与焊接在侧传动箱上的支撑板固结。被动除草轮和限深板两端分别与连接板和机架连接。主变速箱、侧传动箱、提拉手柄、扶手均与机架连接。
工作时,除草机动力由发动机提供,通过发动机变速箱和蜗轮蜗杆主变速箱将动力传到侧传动箱,经侧传动箱的链传动带动主动除草轮工作。转动张紧轮的调节螺母可调节传动链条的松紧程度。主动除草轮在转动时除去行间杂草,并带动除草机行走,被动除草轮在泥土摩擦力的作业下转动,进一步除去行间杂草。
3 关键部件设计
3.1 关键部件工作机理
水稻秧苗根系由主根和次生根组成,形成椭圆状的粗壮根系,受到外力时变形较小,插秧7~20 d根部深度0.07~0.15 m,宽度0.1~0.2 m;杂草没有分蘖,根系只有主根,插秧7~20 d根部深度仅有0.03~0.05 m[9]。图2中的水稻秧苗和杂草为插秧后7~10 d时的状态,此时可进行除草作业。如图2所示,双行除草机关键部件包括主动除草轮、被动除草轮和限深板。主动除草轮的除草耙齿入土和出土时,能够压实和挑动土壤,将行间杂草埋压于土壤之中或挑出于土壤之外,使杂草无法光合作用或扎根,达到除草目的。被动除草轮的除草耙齿作用与主动除草轮除草耙齿相同,具有辅助除草和限制主动除草轮工作位置作用。限深板能够碾压杂草,限制主动除草轮位置,具有防止机具下陷和保持机具行走稳定的作用[15-18]。在除草作业时,增加了水稻苗侧土壤的疏松程度,有利于渗水和透气,促进水稻生长发育。
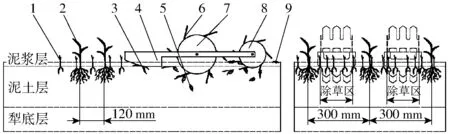
图2 关键部件工作状态Fig.2 Working state of key components1.杂草 2.水稻秧苗 3.被碾压的杂草 4.限深板 5.被埋压的杂草 6.除草耙齿 7.主动除草轮 8.被动除草轮 9.被挑出的杂草
3.2 主动除草轮结构设计
主动除草轮由耙齿、除草轮轴和轮盘铆接而成,如图3所示。由于主动除草轮承担大部分的除草作业,为获得较好的除草效果,本文对主动除草轮的半径、宽度、转速以及除草耙齿长度、数量、安装位置进行设计。
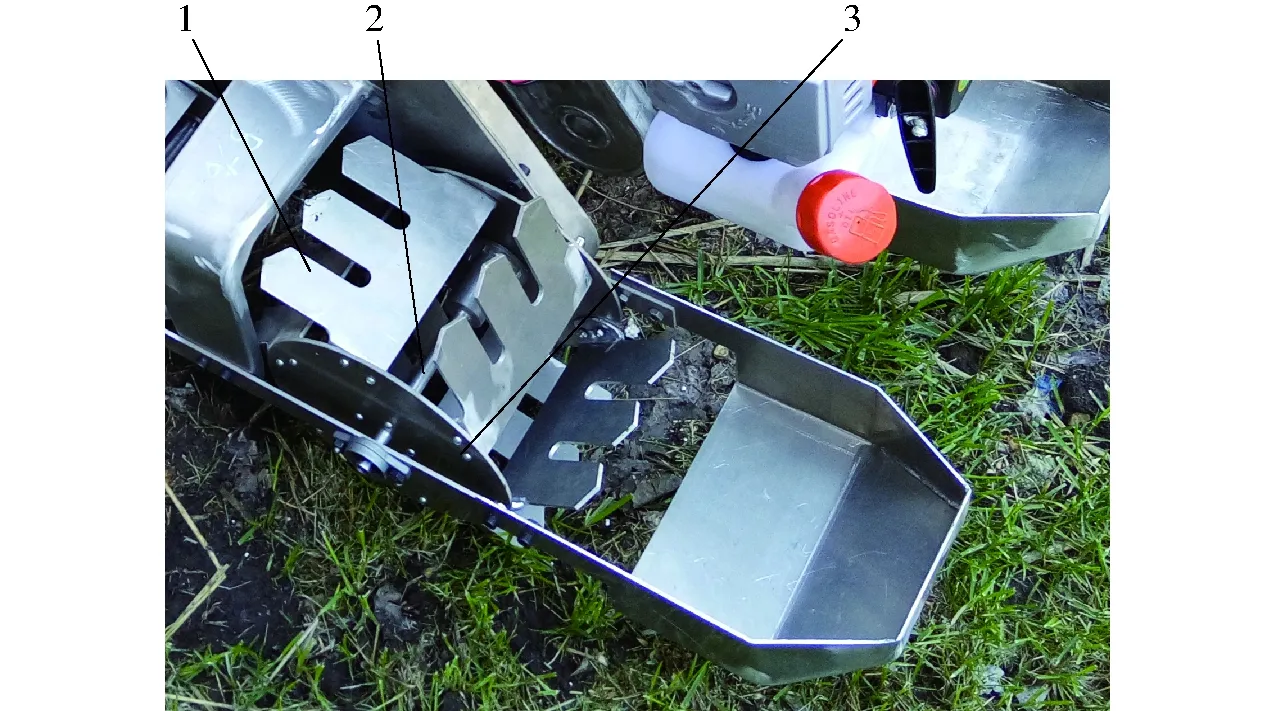
图3 主动除草轮实物图Fig.3 Photo of driving weeding wheel1.耙齿 2.除草轮轴 3.轮盘
3.2.1 主动除草轮半径
主动除草轮动力由链传动传递,设计的主动除草轮半径既要保证有效除去杂草,又要防止侧传动箱底部与泥土接触而增大阻力,如图4所示。
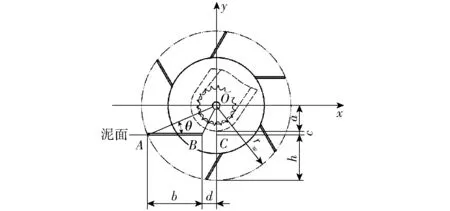
图4 主动除草轮结构Fig.4 Structure of driving weeding wheel
设计主动除草轮回转轴线与侧传动箱底部距离为a,限深板和被动除草轮限定主动除草轮除草深度,并使侧传动箱底部与泥面的距离为c,主动除草轮泥面以下部分长度为h,则主动除草轮无滑转时的滚动半径rw为
rw=a+c+h
(1)
为保证传动平稳,链轮直径不宜过小,设计a为0.05 m,c为0.01~0.02 m。根据杂草根系的长度0.03~0.05 m,为有效除去杂草,减小滑转,主动除草轮在泥面以下部分长度应大于杂草根系的长度,设计h为0.07~0.08 m,由式(1)确定rw为0.13~0.15 m。
3.2.2 耙齿长度、数量和安装位置
主动除草轮在田间作业时,为减少磨损与功率消耗,保证作业质量,应该使主动除草轮处于纯滚动状态,但由于泥土条件变化,主动除草轮不可避免地会出现滑转[19]。主动除草轮的滑转程度用滑转率δ表示,为
(2)
其中
vl=rwω
(3)
v=rω
(4)
式中vl——主动除草轮的理论速度,m/sv——主动除草轮的实际速度(主动除草轮轮心平移的速度),m/s
ω——主动除草轮角速度,rad/s
r——主动除草轮滚动半径,m
S——主动除草轮旋转一周机具行走距离
由式(2)~(4)可得
S=2πrw(1-δ)
(5)
如图4所示,若作业时不漏除草,除草轮所有耙齿长度之和应大于或等于除草轮旋转一周机具行走距离,即
bZ≥2πrw(1-δ)
(6)
式中b——耙齿长度,mZ——耙齿数量
为保证主动除草轮在工作时不被泥土堵住,耙齿不能太多,由式(6)可知,耙齿多,耙齿长度可以变短,但滑转率会增加;耙齿少,除草机工作平稳性变差。综合考虑,选取耙齿数量Z为6,耙齿长度b为
(7)
为保证整片耙齿完全工作,耙齿入土时应与泥面完全贴合,如图4所示AB段的耙齿。耙齿和轮盘铆接而成,设计时要确定耙齿和轮盘的位置,即确定OC和BC的长度。
在△OAC中,lOC=a+c。由
(8)
(9)
得
(10)
3.2.3 主动除草轮的宽度和转速
水稻秧苗行距0.3 m,插秧7~10 d除草期间,水稻秧苗的根系宽度为0.1 m。为减少除草机在缓苗后对水稻秧苗的损伤,同时考虑主变速箱和侧传动箱的设计宽度,主动除草轮的设计宽度为0.15~0.18 m。
主动除草轮的动力由发动机提供,为选择发动机类型和主变速箱的传动比,需要确定除草轮的转速,根据农艺要求,除草机的作业速度(主动除草轮轮心平移的速度)v低于0.67 m/s,由式(4)、(5)可知主动除草轮的角速度ω为
(11)
主动除草轮的转速n为
(12)
3.3 被动除草轮和限深板结构设计
被动除草轮是靠泥土对耙齿的摩擦力驱动除草轮旋转,具有辅助除草和限制主动除草轮工作位置的作用,其结构与主动除草轮相似。工作时,被动除草轮回转轴线与主动除草轮回转轴线在同一平面上,并与泥面平行,在泥面以下的设计长度l与杂草长度相等。被动除草轮(无滑转、无滑移)的滚动半径rv为
rv=a+c+l
(13)
被动除草轮宽度与主动除草轮宽度相同,被动除草轮转速与其运动状态相关,被动除草轮耙齿的数量和安装角度设计方法与主动除草轮相似,耙齿长度在保证滚动半径rv以及入土时与泥面完全贴合的前提下,可适当调整。
限深板能够碾压杂草,限制主动除草轮位置,起到防止机具下陷和保持机具行走稳定的作用。限深板底面与泥面接触,限深板上面与主动除草轮和被动除草轮回转轴线在同一平面即可。限深板宽度与主动除草轮宽度相同。为减小除草机的工作阻力,限深板设计长度和限深板的宽度相同,与泥面接触长度为限深板长度的1/2即可。
4 除草机受力分析
除草机与泥土接触的部件为主动除草轮、被动除草轮和限深板。为选择发动机和主变速箱的类型,还需要确定除草机的驱动力矩,因此,本文将对主动除草轮、被动除草轮、机架和限深板(发动机、发动机变速箱、主变速箱、侧传动箱、机架、限深板作为一个整体为研究对象,简称“机架和限深板”)进行受力分析,如图5所示。
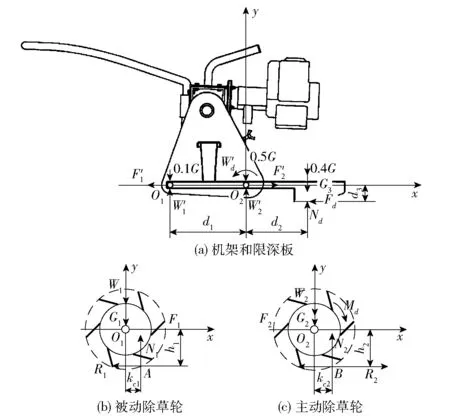
图5 关键部件受力分析Fig.5 Force analysis of key components
设除草机前行走方向与x轴正方向相同,被动除草轮铰链点O1与主动除草轮铰链点O2的距离为d1,限深板质心点与主动除草轮铰链点O2的距离为d2,机架(包括发动机、发动机变速箱、主变速箱、侧传动箱和机架)的重力为G,铰链点O1、O2和限深板质心所分配的重力分别为0.1G、0.5G和0.4G,如图5a所示。
主动除草轮和被动除草轮入土部分受到泥土法向力的作用,同时受到泥土摩擦力的作用。法向力和摩擦力随泥土性能、除草轮形状和位置不同而变化,合力作用点的位置也可能变化[19]。由于耙齿对泥面的垂直挤压发生在第四象限,可以确定合力作用点是在第四象限某处。假设图5b的A点和图5c的B是合力的作用点,将此力分解为水平分力R和垂直分力N。
如图5c所示,当主动除草轮做匀速运动时,力的平衡方程为
∑Fx=R2-F2=0
(14)
∑Fy=N2-W2-G2=0
(15)
∑MO2=N2kc2+R2h2-Md=0
(16)
式中R2——泥土合力对主动除草轮的作用力在x轴方向分力,N
F2——主动除草轮牵引的机架对主动除草轮的作用力,N
N2——泥土合力对主动除草轮的作用力在y轴方向分力,N
Md——驱动力矩,N·m
W2——机架和限深板对铰链点O2的载荷,N
G2——主动除草轮的重力,N
kc2——合力作用点B与y轴的距离,mm
h2——合力作用点B与x轴的距离,mm
如图5b所示,当被动除草轮做匀速运动时,力的平衡方程为
∑Fx=F1-R1=0
(17)
∑Fy=N1-W1-G1=0
(18)
∑MO1=N1kc1-R1h1=0
(19)
式中R1——泥土合力对被动除草轮的作用力在x轴方向分力,NF1——机架和限深板对被动除草轮的拉力,N
N1——泥土合力对被动除草轮的作用力在y轴方向分力,N
W1——机架和限深板对铰链点O1的载荷,N
G1——被动除草轮的重力,N
kc1——合力作用点A与y轴的距离,mm
h1——合力作用点A与x轴的距离,mm
如图5a所示,当机架和限深板做匀速运动时,力的平衡方程为
∑Fx=F′2-F′1-Fd=0
(20)
∑Fy=W′1+W′2+Nd-G3-G=0
(21)
∑MO2=0.1Gd1+Ndd2+M′d-
W′1d1-Fdd3-(G3+0.4G)d2=0
(22)
式中F′1——被动除草轮对机架的拉力,NF′2——主动除草轮牵引机架的作用力,N
Fd——泥土对限深板的摩擦力,N
W′1——被动除草轮对铰链点O1的载荷,N
W′2——主动除草轮对铰链点O2的载荷,N
Nd——泥土对限深板的载荷,N
G3——限深板重力,N
G——机架重力,N
M′d——驱动力矩对铰链点O2的反作用力矩,N·m
式(14)~(22)中,W1=W′1,W2=W′2,F1=F′1,F2=F′2,R1=fr1N1,R2=fr2N2,Fd=μNd,fr1和fr2为滚动摩擦因数,μ为滑动摩擦因数。
选取R2最大时,设计除草机的驱动力矩。
假设fr1=fr2=μ=1,则R1=N1,R2=N2,Fd=Nd,将式(15)代入式(16)得
Md=(W2+G2)(kc2+h2)
(23)
由式(20)、(21)、(14)、(17)、(15)、(18)得
Fd=F′2-F′1=F2-F1=R2-R1=
N2-N1=G2+W2-(G1+W1)
(24)
Nd=G+G3-W′1-W′2=
G+G3-W1-W2
(25)
由于Fd=Nd,由式(24)、(25)解得
(26)
将式(26)代入式(23)得
(27)
(28)
式中,G+G1+G2+G3为除草机整机重力。
5 除草机主要参数确定
设计主动除草轮回转轴线与侧传动箱底部距离a为0.05 m,侧传动箱底部与泥面距离c为0.02 m,主动除草轮泥面以下部分长度h为0.08 m,由式(1)可知,主动除草轮无滑转时滚动半径rw为0.15 m。被动除草轮泥面以下部分长度l为0.03 m,由式(13)可知,被动除草轮无滑转、无滑移时的滚动半径rv为0.1 m。
由于农业机械在田间作业时的行走轮滑转率为3%~8%,水田作业机具主动轮滑转率会超过15%,以致浪费动力[20-26]。设计最大滑转率δ为20%,耙齿数量Z为6,由式(7)、(10)得出主动除草轮耙齿长度b为0.12 m,耙齿安装位置OC长度为0.08 m,BC长度为0.01 m。
双行除草机要求结构紧凑,质量轻,可以单手拉起,设计整机质量为26 kg,由式(28)可知,设计的驱动力矩Mdmax为27 N·m。
除草机由1.25 kW单缸二冲程发动机提供动力,发动机转速120 r/s,发动机变速箱传动比为1∶20,将农艺要求的最大作业速度代入式(12),确定主动除草轮的转速,从而确定主变速箱的传动比为1∶7.2。主变速箱采用RV40蜗轮蜗杆减速器,传动比可选择1∶7.5,1∶10,1∶20,…,1∶100,主变速箱选择1∶7.5的传动比,蜗轮输出力矩小于27 N·m,不满足设计要求,主变速箱选择传动比1∶10,蜗轮输出力矩满足设计要求。选择传动比1∶10的RV40蜗轮蜗杆减速器为主变速箱,除草机发动机在额定功率下工作时,主动除草轮的转速n为0.6 r/s,由式(12)可知,当滑转率δ为3%~20%,除草机的作业速度v为0.45~0.55 m/s,满足农艺要求。
根据主动除草轮和被动除草轮的半径,设计主动除草轮铰链点O2与被动除草轮铰链点O1的距离d1为0.28 m,限深板质心处与主动除草轮铰链点O2的距离d2为0.28 m,则被动除草轮铰链点O1处分配的机架重力和限深板质心处分配的机架重力应该相等。如图5a所示,由于机架铰链点O2处受到驱动力矩的反作用力矩M′d,使得机架在行走时有绕铰链点O2向被动除草轮方向旋转的趋势,因此,设计时应保证限深板质心处分配的重力多一些,用于平衡M′d,即机架(包括发动机、发动机变速箱、主变速箱、侧传动箱和机架)的重心应在机架铰链点O2与限深板质心之间。设计限深板质心处分配的重力为Gx,则M′d=Gxd2,求出Gx为96 N,约为0.4G。
双行除草机采用铝合金材料,设计整机质量为26 kg,主动除草轮质量0.9 kg,被动除草轮质量0.6 kg,限深板质量0.5 kg,机架质量22 kg(发动机和发动机变速箱质量约8 kg,主变速箱RV40质量3 kg,侧传动箱和机架质量10 kg)。
6 试验结果与分析
2016年5月25日,在黑龙江省哈尔滨市新乡试验田进行田间试验,同时黑龙江农垦农业机械试验鉴定站对3SCJ-2型水田除草机除草效果进行田间检测,如图6所示。

图6 双行水田除草机田间作业性能检测Fig.6 Performance test of double row paddy field weeding machine in field
试验田块面积约为0.1 hm2,泥浆层深度为0.03 m,泥土层深度0.15~0.18 m,水稻秧苗的平均高度为0.2 m,行距为0.3 m,株距为0.12 m。杂草的平均高度为0.04~0.06 m。试验时选取田块尺寸为1 m×1 m的区域为测试区域,各测试区域在田内均匀分布。
除草作业速度和主动除草轮转速是影响除草效果的重要指标,而除草机是通过主动除草轮转动驱动除草机行走,田间试验时除草作业速度和主动除草轮转速是同一个指标。除草率为已除杂草占杂草总数的百分比(测试区域内杂草根茎被拉断、翻埋、飘起均为已除杂草,杂草根与泥面连接,可以继续生长的杂草为未除杂草),除草前统计各测区杂草的数量,除草试验完成后,用细绳将测试区围住,统计已除杂草和未除杂草数量,每组数据采集3次,取平均值。通过测试区域的试验指标估计整体指标[9]。田间试验选择除草作业速度为试验因子,选择除草率作为评价水田除草机除草效果的性能指标,分析除草作业速度对除草率的影响,试验结果如表1所示。

表1 不同除草作业速度下的除草率
根据表1的试验数据,应用Design-Expert得出除草率的方差分析结果如表2所示。
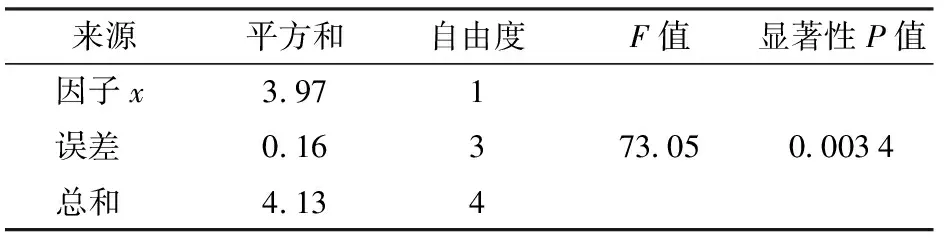
表2 除草作业速度对除草率影响的方差分析
由表2可知,显著性P值小于0.05,说明模型显著。在该情况下,x是有效的模型项。拟合出除草作业速度对除草率影响的回归方程为
y=-12.6x+84.71
(29)
由图7可知,除草率随除草作业速度的增加有减小的趋势。除草机发动机变速箱、主变速箱和侧传动箱传动比已确定,当发动机转速高于离合器结合转速时开始工作,所以离合器结合时的速度是除草最低作业速度,该速度为0.35 m/s;当发动机在额定功率下工作时,除草作业速度为0.50 m/s;当发动机在最大功率工作时,除草作业速度为0.55 m/s。田间试验结果表明:除草机的除草率为78.0%~80.5%。除草作业前后效果如图8所示。
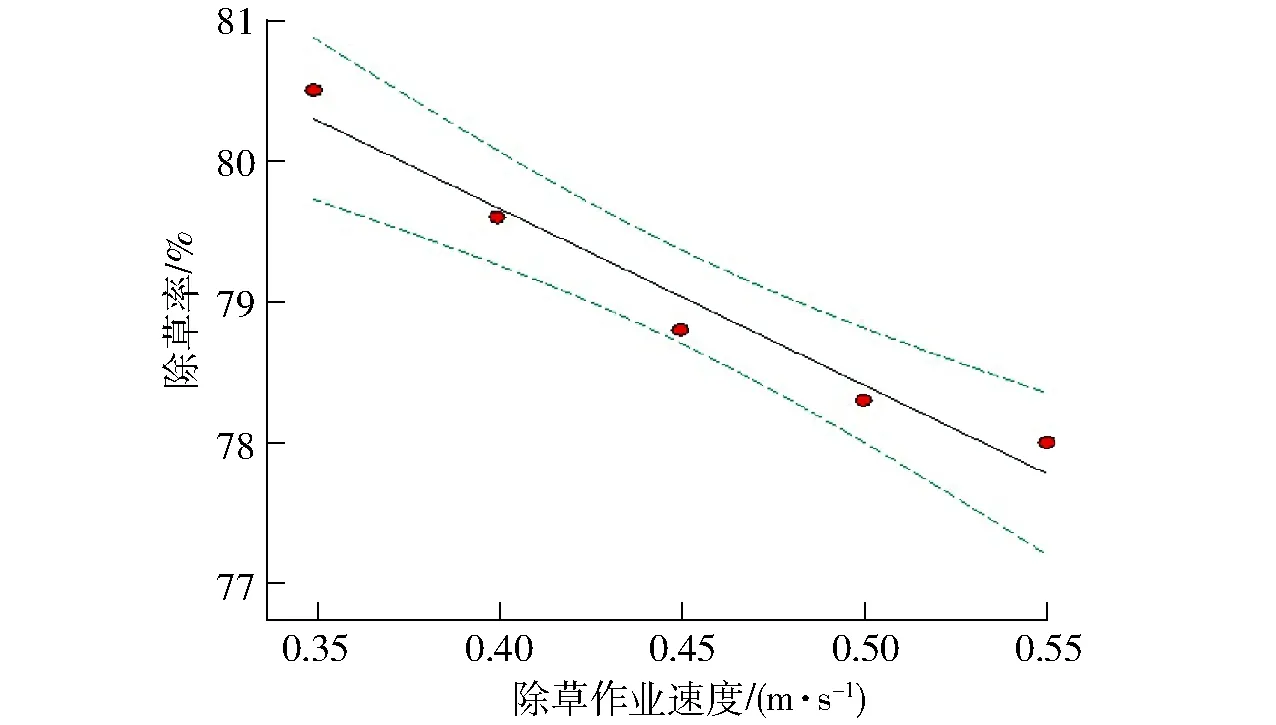
图7 除草作业速度对除草率的影响Fig.7 Influence of forward velocity on weeding rate for weeding machine

图8 除草作业前后对比Fig.8 Weeding contrast before and after operation in field1.除草前 2.除草后
黑龙江农垦农业机械试验鉴定站对3SCJ-2型水田除草机除草效果进行田间检测结果如表3所示。检测结果表明,除草率达到农艺技术指标的要求。除草作业时,还应注意如下问题:
(1)除草机发动机转速升到离合器结合转速以上时开始工作,开、停、快、慢均由油门控制。除草作业时,一般油门控制在80%左右;行走到地头时不需要控制除草机转向,只需关闭油门,拉起提拉手柄,人工实现除草机转向。
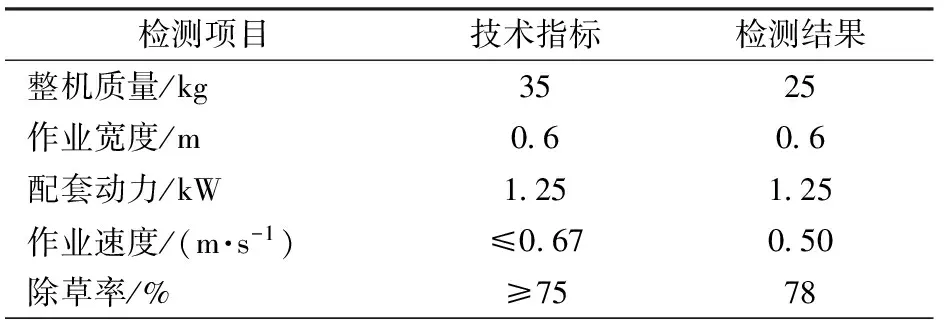
表3 双行水田除草机田间作业性能检测结果
(2)除草机的除草位置通过扶手来调整,当苗行不直时,可按压扶手,翘起限深板,同时移动扶手位置,使得苗行重新对正。
(3)由于除草轮宽度为0.18 m,在除草作业时,通过调整除草机扶手,不会出现伤苗现象,但水稻秧苗株间附近的杂草无法除去。
(4)在水稻生长周期内,需要进行3次除草,插秧后7~10 d进行第1次除草,插秧后14 d进行第2次除草。本文设计的行间除草机可以满足前两次的除草要求,每次除草率为78%,已经达到农艺的技术指标,可以大大减小人工除草的劳动强度。在行间除草作业后,一般采用人工除去株间杂草。
7 结论
(1)设计了除草机主动除草轮,通过对水稻秧苗、杂草根系特点的分析和结构要求,确定了主动除草轮半径、宽度、转速和耙齿结构等参数。
(2)通过对除草机受力分析,推导出主动除草轮驱动力矩的简化公式,为除草机的动力分配、发动机和主变速箱的选择奠定了理论基础。
(3)根据关键部件结构参数的计算公式、受力分析结果和农艺技术指标要求,确定了主动除草轮半径为0.15 m,被动除草轮半径为0.1 m,主动除草轮转速为0.6 r/s,耙齿数量为6,耙齿长度为0.12 m,驱动力矩为27 N·m;选择了发动机为1.25 kW单缸二冲程发动机,发动机自带的齿轮变速箱传动比为1∶20,选择RV40蜗轮蜗杆减速器为主变速箱。
(4)由田间试验和性能检测结果可知,3SCJ-2型除草机作业质量良好,达到农艺技术指标的要求,可较好地完成行间除草作业。
1 胡炼,林潮兴,杨伟伟,等.株间除草装置的除草和避苗状态切换控制系统设计[J].沈阳农业大学学报,2014,45(3):305-309. HU Lian,LIN Chaoxing,YANG Weiwei,et al.Design of switch controlling system between the state of weeding and avoiding for intra-row weed mechanical control device[J].Journal of Shenyang Agricultural University,2014,45(3):305-309.(in Chinese)
2 西脇健太郎,大谷隆二,中山壮一.機械除草と除草剤の部分散布を組み合わせたハイブリッド除草機[J].農業機械学会誌,2010,72(1):86-92.
3 臼井智彦,伊藤勝浩,大里達朗.水稲栽培における固定式タイン型除草機の除草効果[J].東北雑草研究会,2009(9):38-41.
4 HWANG J B, PARK S T, SONG S B.Variation of weed occurrence and rice yield by using the cultivating weeder for three years in paddy rice[J].Korean Journal of Weed Science,2007,27(4):334-340.
5 REMESAN R, ROOPESH M S, REMYA N, et al. Wet land paddy weeding—a comprehensive comparative study from south India[J].Agricultural Engineering International: the CIGR Journal,2007,9:1-21.
6 TAJUDDIN A A.Development of a power weeder for low landrice[J].Journal of the Institution of Engineers (India),2009,90(6):15-17.
7 TILLETT N D, HAGUE T,GRUNDY A C,et al. Mechanical within-row weed control for transplanted crops using computer vision[J].Biosystems Engineering,2007,99(2):171-178.
8 汪贞,席运官.国内外有机水稻发展现状及有机稻米品质研究[J].上海农业学报,2014,30(1):103-107. WANG Zhen,XI Yunguan.The development status of organic rice at home and abroad and study on the quality of organic rice[J].Agricultural Shanghai,2014,30(1):103-107.(in Chinese)
9 陶桂香,王金武,周文琪,等.水田株间除草机械除草机理研究与关键部件设计[J/OL].农业机械学报,2015,46(11):58-63.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20151109&flag=1&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2015.11.009. TAO Guixiang,WANG Jinwu,ZHOU Wenqi,et al.Herbicidal mechanism and key components design for paddy weeding device[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015,46(11):58-63.(in Chinese)
10 马旭,齐龙,梁柏,等.水稻田间机械除草装备与技术研究现状及发展趋势[J].农业工程学报,2011,27(6):162-168. MA Xu,QI Long,LIANG Bai,et al.Present status and prospects of mechanical weeding equipment and technology in paddy field[J].Transactions of the CSAE, 2011, 27(6): 162-168.(in Chinese)
11 齐龙,梁仲维,马旭,等.耙压式除草轮与水田土壤作用的流固耦合仿真分析及验证[J].农业工程学报,2015,31(5):29-36. QI Long,LIANG Zhongwei,MA Xu,et al.Validation and analysis of fluid-structure interaction between rotary harrow weeding roll and paddy soil[J]. Transactions of the CSAE,2015,31(5):29-36.(in Chinese)
12 王金武,唐汉,王金峰,等.指夹式玉米精量排种器导种投送运移机理分析与试验[J/OL].农业机械学报,2017,48(1):29-37,46.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20170105&flag=1&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2017.01.005. WANG Jinwu,TANG Han,WANG Jinfeng,et al.Analysis and experiment of guiding and dropping migratory mechanism on pickup finger precision feed metering device for corn[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2017,48(1):29-37,46.(in Chinese)
13 胡炼,罗锡文,林潮兴,等.1PJ-4.0型水田激光平地机设计与试验[J/OL].农业机械学报,2014,45(4):146-151.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20140423&flag=1&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2014.04.023. HU Lian,LUO Xiwen,LIN Chaoxing,et al.Development of 1PJ-4.0 laser leveler installed on a wheeled tractor for paddy field[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2014,45(4):146-151.(in Chinese)
14 曹萌萌,李俏,张立友,等.黑龙江省积温时空变化及积温带的重新划分[J].中国农业气象,2014,35(5):492-496. CAO Mengmeng,LI Qiao,ZHANG Liyou,et al.Accumulated temperature variation and accumulated temperature rezone in Heilongjiang province[J].Chinese Journal of Agrometeorology,2014,35(5):492-496.(in Chinese)
15 陈振歆,王金武,牛春亮,等.弹齿式苗间除草装置关键部件设计与试验[J].农业机械学报,2010,41(6):81-86. CHEN Zhenxin, WANG Jinwu, NIU Chunliang,et al.Design and experiment of key components of trash cultivator’s working in paddy rice seeding linges[J].Transactions of the Chinese Society for Agricultural Engineering,2010,41(6):81-86.(in Chinese)
16 张春建,王金武,赵佳乐,等.水田行间除草装置的设计与试验[J].东北农业大学学报,2012,43(2):49-53. ZHANG Chunjian,WANG Jinwu,ZHAO Jiale,et al.Design and experimental research on device of weeding between seedlings from paddy fields[J]. Journal of Northeast Agricultural University,2012,43(2):49-53.(in Chinese)
17 魏从梅,王金武,张影微.水田除草关键部件扭矩测试试验研究[J].东北农业大学学报,2012,43(5):87-91. WEI Congmei,WANG Jinwu,ZHANG Yingwei.Study on torque measurement of key components of weed in paddy field[J].Journal of Northeast Agricultural University,2012,43(5):87-91.(in Chinese)
18 王金武,牛春亮,张春建,等.3ZS-150型水稻中耕除草机设计与试验[J].农业机械学报,2011,42(2):75-79. WANG Jinwu,NIU Chunliang,ZHANG Chunjian,et al.Design and experiment of 3ZS-150 paddy weeding-cultivating machine[J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(2):75-79.(in Chinese)
19 李西秦,刘冰,齐劲峰.车轮动力半径与滑转率的研究[J].拖拉机与农用运输车,2003(2):17-20.
20 吴崇友,张敏,金诚谦,等.2BYS-6型水田中耕除草机设计与试验[J].农业机械学报,2009,40(7):51-54. WU Chongyou,ZHANG Min,JIN Chengqian,et al.Design and experiment of 2BYS-6 type paddy weeding-cultivating machine[J].Transactions of the Chinese Society for Agricultural Machinery,2009,40(7):51-54.(in Chinese)
21 丁启朔,葛双洋,任骏,等.水稻土深松阻力与土壤扰动效果研究[J/OL].农业机械学报,2017,48(1):47-56,63.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20170107&flag=1&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2017.01.007. DING Qishuo,GE Shuangyang,REN Jun,et al.Characteristics of subsoiler traction and soil disturbance in paddy soil[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2017,48(1):47-56,63.(in Chinese)
22 张朋举,张纹,陈树人,等.八爪式株间机械除草装置虚拟设计与运动仿[J].农业机械学报,2010,41(4):56-59. ZHANG Pengjun,ZHANG Wen,CHEN Shuren,et al.Design and kinetic simulation for eight claw intra-row mechanical weeding device[J].Transactions of the Chinese Society for Agricultural Machinery,2010,41(4):56-59.(in Chinese)23 孙中兴,唐力伟,汪伟,等.考虑土壤滑转流动的柔性履带应力分布研究[J/OL].农业机械学报,2017,48(1):317-324.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20170142&flag=1&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2017.01.042. SUN Zhongxing,TANG Liwei,WANG Wei,et al.Flexible track stress distribution considering slip subsidence[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2017,48(1):317-324.(in Chinese)
24 陆华忠,罗锡文.水田驱动叶轮轮叶下土壤流动特性与动力性能研究[J].农业机械学报,2010,41(7):50-53. LU Huazhong,LUO Xiwen.Rule and dynamic performance under a paddy-field wheel lug[J].Transactions of the Chinese Society for Agricultural Machinery,2010,41(7):50-53.(in Chinese)
25 郭俊,姬长英,CHAUDHRY Arslan,等.稻麦秸秆旋耕作业中受力与位移分析[J/OL].农业机械学报,2016,47(10):11-18.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20161002&flag=1&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.10.002. GUO Jun,JI Changying,CHAUDHRY Arslan,et al.Stress and displacement analyses of rice and wheat straws in rotary tillage process[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2016,47(10):11-18.(in Chinese)
26 陈子文,张春龙,李伟,等.株间锄草机器人刀苗信息优化系统设计与试验[J/OL].农业机械学报,2015,46(9):62-67.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150909&flag=1&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2015.09.009. CHEN Ziwen,ZHANG Chunlong,LI Wei,et al.Design and experiment on hoe-crop-positioning optimization system for intra-row weeding robot[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015,46(9):62-67. (in Chinese)
Design and Experiment of 3SCJ-2 Type Row Weeding Machine for Paddy Field
WANG Jinfeng WANG Jinwu YAN Dongwei TANG Han ZHOU Wenqi
(CollegeofEngineering,NortheastAgriculturalUniversity,Harbin150030,China)
With the improvement of people’s living standard, the requirement of rice quality becomes increasingly high. In the process of rice planting, the using amount of herbicide should be reduced. In order to reduce the using amount of herbicide, the mechanical weeding is the most time-saving and force-saving way. Japan is in the leading level for mechanical weeding technology, but the soil conditions are different between Japan and China, even in China, the soil is different for different provinces and areas. In addition, the edges of paddy field do not have steering areas for weeders in China. Therefore, single row and double row weeding machines with compact structure and light weight are more suitable for operation in China. The weeds were buried and picked out though the rotation of driving and driven weeding wheel for double row paddy field weeding machine. Structure model of driving weeding wheel was established, the design formulas of the structure parameters of the radius, width, speed, rake tooth and so on were developed for driving weeding wheel, and the design principles of the structural parameters for driven weeding wheel and limit deep plate were obtained through the analysis of characteristics of rice seedlings, grass root and structural requirements, which provided references for design of driven weeding wheel and limit deep plate. The mechanical models for driving weeding wheel, driven weeding wheel and the frame and limit deep plate were established, the driving moment of driving weeding wheel was deduced. According to the analysis of the structure model, mechanical model and agronomic technical parameters, the relevant parameters were determined as: the radius of driving weeding wheel was 0.15 m, the radius of driven weeding wheel was 0.1 m, the rotation speed of driving weeding wheel was 0.6 r/s, the number of rake tooth was 6, the length of rake tooth was 0.12 m, the driving moment was 27 N·m, the engine was 1.25 kW with single cylinder two stroke, the main-gear box was RV40 worm gear reducer. The field test and performance experiment were carried out for the developed double row paddy field weeding machine, the results showed that the weeding quality was good for double row paddy field weeding machine, which can meet the needs of agricultural technical indicators.
paddy field; inter-row weeding machine; weeding wheel; design; test
10.6041/j.issn.1000-1298.2017.06.009
2017-02-07
2017-04-10
国家自然科学基金项目(51205056)、国家重点研发计划项目(2016YFD0300909-04)、东北农业大学学术骨干项目(16XG09)和东北农业大学青年才俊项目(14QC34)
王金峰(1981—),男,副教授,主要从事田间机械研究,E-mail: jinfeng_w@126.com
王金武(1968—),男,教授,博士生导师,主要从事田间机械及机械可靠性研究,E-mail: jinwuw@163.com
S224.1+5
A
1000-1298(2017)06-0071-08
猜你喜欢
军事文摘(2020年22期)2021-01-04
今日农业(2020年16期)2020-12-14
新世纪智能(英语备考)(2020年3期)2020-08-11
现代装饰(2020年5期)2020-05-30
家庭影院技术(2019年12期)2020-01-19
东方考古(2018年0期)2018-08-28
世界有色金属(2018年10期)2018-08-05
故事作文·低年级(2018年7期)2018-07-19
中国计算机报(2018年13期)2018-05-23
装备制造技术(2017年3期)2017-05-12