
基于FAHP的桁架机器人可靠性研究
2017-07-01 18:01陈威朱华炳王彪合肥工业大学机械工程学院合肥230009
组合机床与自动化加工技术 2017年4期
陈威,朱华炳,王彪(合肥工业大学机械工程学院,合肥230009)
基于FAHP的桁架机器人可靠性研究
陈威,朱华炳,王彪
(合肥工业大学机械工程学院,合肥230009)
机器人机械结构不具备故障报警机制,故当其发生故障时不利于及时排除,影响整机运行时的可靠性。针对这一问题,以桁架机器人作为研究对象,基于模糊层次分析法(Fuzzy Analytic Hieraichy Process,FAHP)对影响机器人可靠性的机械故障进行分析决策。建立目标评价指标体系,结合可靠性预计和改进的语言值转换标准降低主观偏好的影响,根据可靠性影响因素权重值确定机器人的薄弱部分并给出故障重要性排序。最后通过实例分析表明FAHP在确定机器人机械故障检修顺序中的优越性。
桁架机器人;可靠性;模糊层次分析法
0 引言
桁架机器人,因能实现自动控制、可重复编程、多功能多自由度等特点被广泛应用于完成上下料、码垛、搬运等一系列工作[1]。然而在使用过程中常由于各种故障导致其达不到预期的可靠性要求,进而影响生产效率甚至威胁人身安全。国内外研究学者提出了多种可靠性分析方法,结合故障树或灰色理论对机器人可靠性进行分析与评估[2-3];基于蒙特卡罗法对机器人进行可靠性仿真分析[4]等。
影响机器人可靠性的各类故障中机械故障虽占据较大比例,但因其不能反馈故障信息且具有不确定性,鲜有对机器人机械故障影响进行分析评估的文献,并且传统的可靠性分析存在依赖大样本数据以及难以描述模糊状态的缺陷。因此针对机器人的可靠性研究以零部件失效率作为基础,结合模糊层次分析法进行去模糊化定量分析,根据权重值确定影响机器人可靠性的主次要原因,为分析机械故障影响程度,确定故障检修顺序提供可靠的依据。
1 目标评价指标权重的确定方法
1.1 模糊层次分析法基本理论
层次分析法是美国运筹学家T.L.Saaty提出的一种定性和定量相结合、系统化、层次化的多目标决策方法[5]。但因实际问题的复杂性和评价者经验的局限性,常导致得到的评价不能全面地反映真实情况。
模糊层次分析法是将模糊集理论引入传统层次分析法中,考虑到思维模糊性的前提下以区间形式描述评价,成为解决具有不确定性的问题的科学依据和理论方法。
1.2 目标评价指标体系的建立
针对目标的评价指标体系是表征目标各方面特性的多个指标构成的具有内在结构的有机整体。以机器人可靠性下降为目标,驱动系统、传动机构、气动液压等诸多故障都可导致目标实现,因此建立详尽细致的目标评价指标体系有助于后续的分析和决策。
结合机器人在实际工况中的机械故障按目标评价指标体系建立自上而下的递阶层次结构。分析过程中预先设定各层次中的各元素彼此之间是可靠性串联的关系,各层次中单因素失效即可导致机器人可靠性下降,使分析更加直观而且有助于后续定量分析的准确性。
1.3 主观评价定量化
模糊层次分析法分析的关键在于构建合理科学的判断矩阵,需要将主观评价去模糊化和定量化,通常选取三角模糊数描述评价是考虑到三角模糊数能够反映参数在一定置信度水平下的波动范围,能为描述参数的不确定性提供更多的信息[6],其隶属函数可表示为:
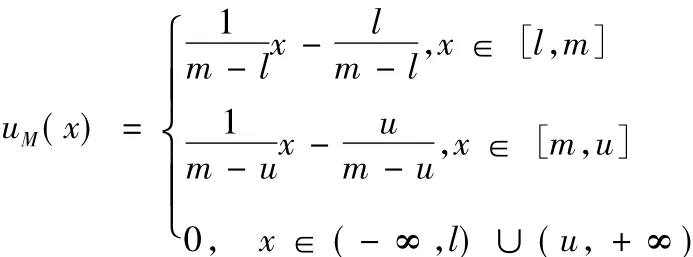
式中,l≤m≤u,矩阵中元素以三角模糊数(l,m,u)形式表示,其中间m值是按标度对矩阵中行列元素两两比较得出的重要度数值。为方便掌握和后续计算,选取0.1~0.9标度法,其含义如表1所示。
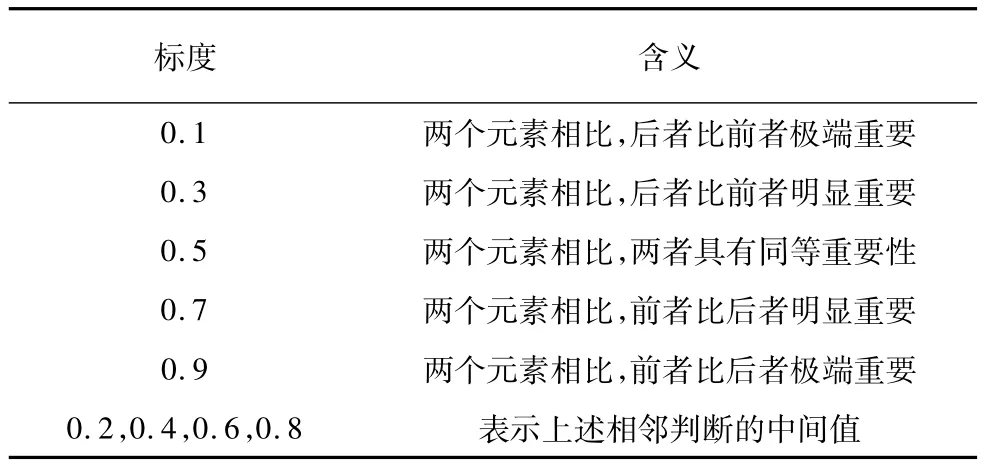
表1 0.1~0.9标度法及含义
1.4 一致性检验及权重计算
在计算目标评价指标权重之前需要对矩阵进行一致性检验,通常采用CR<0.1或者矩阵的相容性[7]作为一致性检验的标准,但是这两种方法往往因一致性调整而增大计算量。文献[4]通过对模糊判断矩阵进行数学变换确保其一致性的方法更为简单实用。
设R为模糊互补判断矩阵,矩阵第i行的行和为ri,按公式(1)进行数学变换,得到具有一致性模糊一致矩阵R'。

对模糊一致矩阵采用置信度排序方法[8]来配合完成目标评价指标权重值的计算。层次单排序即为计算各层元素对于上层准则的权重值,其公式如下:

式中:α≥(n-1)/2,一般取α=(n-1)/2。
层次总排序则是计算方案层元素对于上目标层元素组合权重值。
2 实例分析
对影响桁架机器人可靠性的机械故障进行定性定量分析,确定系统的薄弱部分和故障检修顺序。
2.1 桁架机器人可靠性评价指标体系
桁架机器人简图如图1所示,可实现直角坐标系内沿X轴、Z轴的直线运动以及末端操作器绕Z轴的旋转摆动和手爪的开闭。
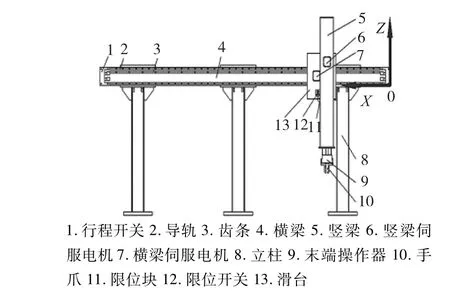
图1 桁架机器人简图
机器人正常工作状态是指由运动控制卡预先设置好两个轴的运动方向和距离以到达预定位置,末端操作器上的旋转摆动气缸驱动摆动和手爪抓取或释放工件。如果任何一个轴未按指令运动或运动到非预定位置以及末端操作器功能失效则视为故障,则机器人的可靠性受到影响。
设定桁架机器人机械结构是由X轴、Z轴和末端操作器三个子系统以及各自的元器件组成,彼此无冗余和替代。因此分为X轴系统故障、Z轴系统故障和末端操作器系统故障三个部分,细化准则层元素得到机器人可靠性评价指标的层次结构如图2所示。
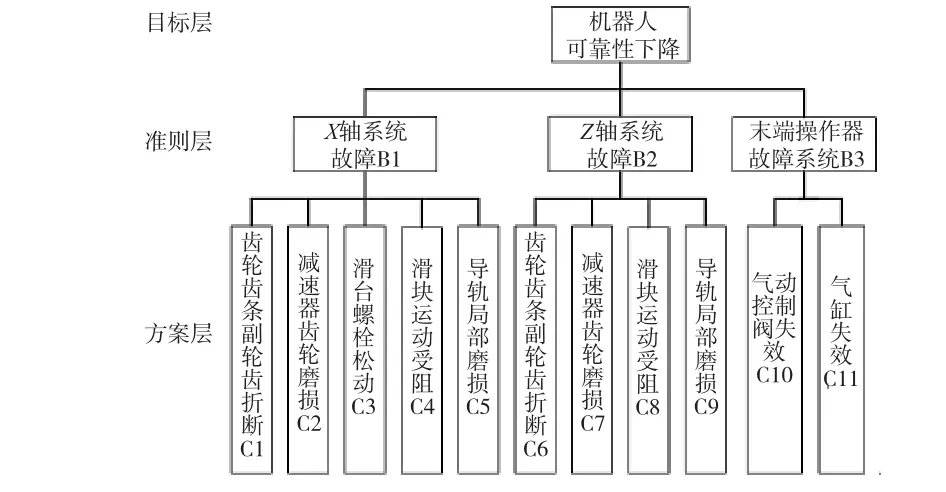
图2 机器人可靠性评价指标的递阶层次结构
2.2 机器人可靠性预计
为降低评价者主观偏好的影响,在给出机器人机械故障比较重要度之前,对其进行可靠性预计以得到客观的预估。以机器人X轴系统为例,首先绘制其可靠性模型框图如图3所示。

图3 桁架机器人X轴系统可靠性模型框图
其次,参考《非电子器件可靠性数据》等[9-11]选择合理的零部件失效率,得到机器人主要零部件失效率如表2所示,失效率的基本单位是fit,1fit=10-9/h。
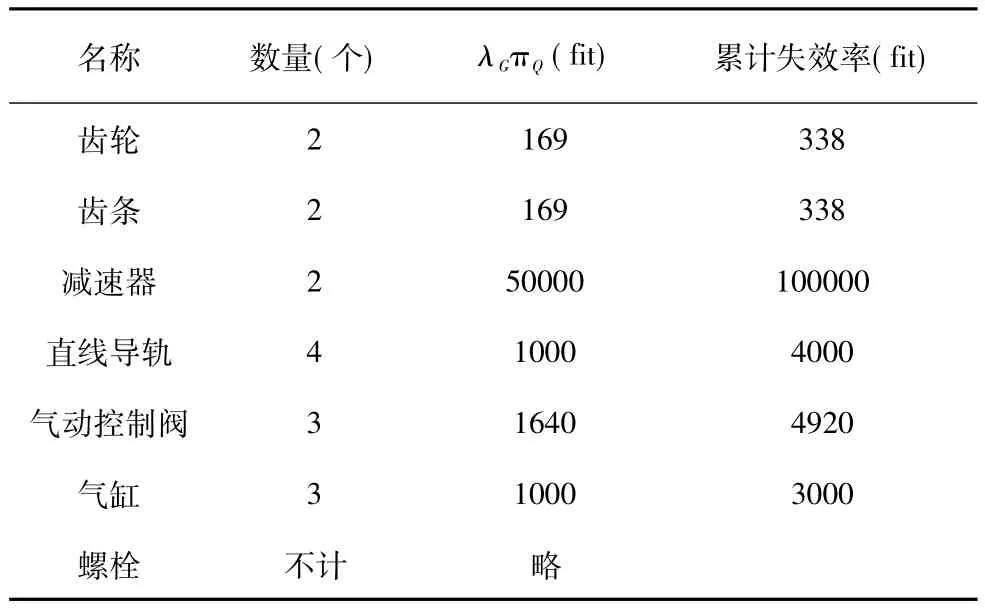
表2 机器人主要零部件失效率
机器人的子系统失效率和零部件失效率之间的关系为:

式中,λG—某一使用环境中第i种零部件的通用失效率,本文按“地面固定”环境;
πQ—第i种零部件的质量系数;
Ni—第i种零部件的数量;
n—元器件的种类数;
λS—机器人子系统的失效率。
机器人各子系统的平均无故障时间为:

由公式(3)、公式(4)可得机器人各子系统的失效率为:
λZ=169+169+50000+2000=52338(fit)
MTBFZ=19106(h)
λ末=1640+1640+1640+3000=8920(fit)
MTBF末=11210(h)
这里没有计算X轴系统的失效率是因为缺少螺栓的失效率数值。实际工况中由于非确定性原因会随机造成某些零部件失效,因此得不到其准确的失效率或失效率真值,所以在表2中没有进行罗列。X轴滑台上用于连接的螺栓失效率虽然可以忽略但确实存在,因此可知X轴系统的失效率应该大于Z轴系统,为机械故障比较重要度的预判提供参考。
2.3 传统语言值转换标准的改进
相比较具体的数值差别,评价者往往更倾向于选择“低”、“很高”这类主观性描述,这就给评价定量化带来困难,需要一个合理的转换标准解决此类问题。
目前常用的转换标准是将语言值集合﹛非常低(VL),低(L),比较低(FL),中等(M),比较高(FH),高(H),非常高(VH)﹜对应于[0,1]中不同的数值以示区别。传统语言值转换标准容易使评价落入局部范围呈现单一化,为了将可靠性预计与模糊层次分析法联系起来,在传统转换标准的基础上加入合理的失效率数量级以方便进行评价[12],常用的机械零部件故障发生概率为10-6次/h~10-4次/h,构建基于失效率的语言值转换标准如图4所示。
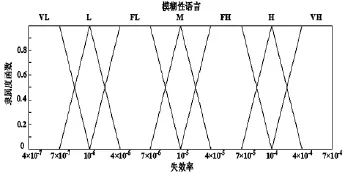
图4 基于失效率的语言值转换标准
2.4 机器人可靠性影响因素权重值计算
根据可靠性预计和改进的语言值转换标准可对机器人各机械故障重要程度形成初步评价,选取实际经验较为丰富的三位专家给出评价值,对评价值平均取舍后构建模糊判断矩阵如表3~表6所示。为保证专家评价结果的可信度,选取保守的置信区间。计算得到可靠性影响因素权重值如表7所示。

表3 机器人子系统故障比较判断矩阵
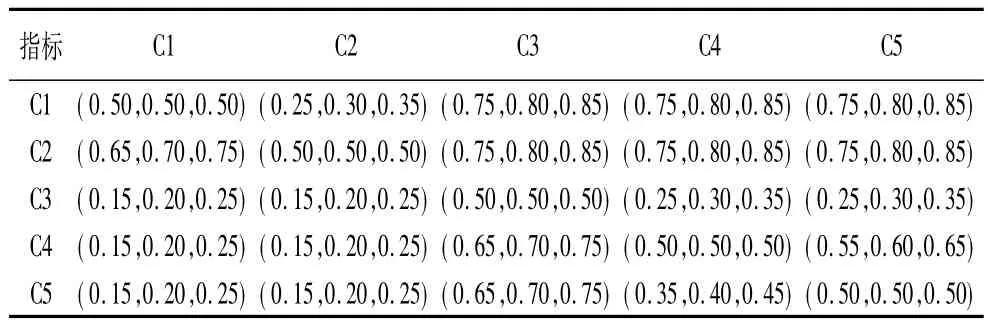
表4 X轴系统故障影响因素比较判断矩阵

表5 Z轴系统故障影响因素比较判断矩阵

表6 末端操作器系统故障影响因素比较判断矩阵

表7 机器人可靠性影响因素权重
由表7可知准则层的权重矩阵W1为:
W1=(0.525,0.371,0.104)T
所以方案层中各元素对于目标的总排序权重为: W=WT1×WT2=[0.16485 0.197925 0.02205 0.07875 0.061425 0.126511 0.160272 0.049714 0.034503 0.072488 0.031512]

图5 方案层各元素对目标的层次总排序柱状图
根据表7可知X轴、Z轴系统比末端操作器系统对机器人可靠性的影响更大,两者权重之和为0.896,而X轴系统比Z轴系统明显重要,其权重为0.525,这与X轴实际承载有关。各机械故障对机器人可靠性的影响程度如图5所示。减速器和齿轮齿条副对机器人正常运行的影响程度较大。通过比较表明经模糊层次分析法得出的结果与实际情况及相关数据较为吻合。
3 结论
(1)通过对机器人进行可靠性预计可知X轴系统失效率最高,Z轴系统次之,末端操作器系统失效率最低。
(2)在传统语言值转换标准中加入合理的失效率数量级为评价提供客观数据可以降低主观偏好的影响。
(3)利用模糊层次分析法可以表明评价模糊性的特点并简单有效的计算出机器人可靠性影响因素权重值。计算结果表明减速器和齿轮齿条副是机器人机械结构中的薄弱环节,对导致X轴系统故障B1的因素排序为:减速器齿轮磨损>齿轮齿条副轮齿折断>滑块运行不畅>导轨局部磨损>滑台螺栓松动,基本反映了机器人故障的真实情况,也为故障检修顺序的确定和结构优化提供可靠的依据,这对于提高桁架机器人可靠性具有十分重要的意义。
[1]李刚,周文宝.直角坐标机器人简述及其应用介绍[J].伺服控制,2008(9):72-75.
[2]苏金远.基于故障树的弧焊工业机器人系统可靠性研究[D].衡阳:南华大学,2013.
[3]孙志佳.基于灰色理论的工业机器人可靠性与维修性评估研究[D].昆明:昆明理工大学,2015.
[4]王翀.管道清灰机器人操作臂运动学及可靠性分析[D].兰州:兰州理工大学,2008.
[5]覃柏英.FAHP的标度系统与排序方法研究[D].南宁:广西大学,2005.
[6]余勋,梁婕,曾光明,等.基于三角模糊数的贝叶斯水质评价模型[J].环境科学学报,2013,33(3):904-909.
[7]王宇,汪永超,牛印宝,等.基于模糊层次分析法的数控机床设备优化选择[J].组合机床与自动化加工技术,2014(11):133-136.
[8]王化吉,宗长富,管欣,等.基于模糊层次分析法的汽车操纵稳定性主观评价指标权重确定方法[J].机械工程学报,2011,47(24):83-90.
[9]廖烔生.机器人的可靠性、维修性、安全性[M].北京:科学出版社,1994.
[10]胡杰.高速包装机器人设计及可靠性研究[D].广州:华南理工大学,2012.
[11]卢雷,肖文杰.改进的模糊事故树分析方法[J].电光与控制,2010,17(11):93-96.
(编辑李秀敏)
Reliability Robot of Truss Robot Based on FAHP
CHEN Wei,ZHU Hua-bing,WANG Biao
(School of Mechanical Engineering,Hefei University of Technology,Hefei230009,China)
Because robotmechanicalstructure does nothave faultalarm mechanism,thus itis notconducive to immediate exclusion w hen robot run failure,therefore affect the reliability of the whole operation.In order to solve this problem,it take truss robotas research object,analysis and decide mechanicalfailure of influence the reliability of robot based on fuzzy analytic hierarchy process.Establish target evaluation index system,combine reliability prediction and improved language value conversion standard to reduce the impact of subjective preference,the reducer and rack and pinion is determined as the weak link of robot,According to the w eight of influence factors of reliability and give fault importance rangking.Finally,an example is given to verify the superiority of FAHP in determine order of robot mechanical fault maintenance.
truss manipulator;reliability;fuzzy analytic hierarchy process
TH165;TG659
A
1001-2265(2017)04-0030-04
10.13462/j.cnki.mmtamt.2017.04.008
2016-06-03;
2016-07-06
陈威(1991—),男,安徽六安人,合肥工业大学硕士研究生,研究方向为机器人技术,(E-mail)286632915@qq.com;朱华炳(1963—),男,安徽怀宁人,合肥工业大学教授,博士研究生导师,研究方向为机电一体化装备设计与制造,制造系统工程理论及应用技术等。
猜你喜欢
数字通信世界(2022年5期)2022-06-07
内燃机与配件(2022年2期)2022-01-17
建材发展导向(2021年9期)2021-07-16
建材发展导向(2021年6期)2021-06-09
建材发展导向(2019年5期)2019-09-09
计算机与数字工程(2019年7期)2019-07-31
舰船电子对抗(2019年2期)2019-05-23
电子制作(2017年17期)2017-12-18
汽车与驾驶维修(维修版)(2017年5期)2017-12-06
山东工业技术(2016年15期)2016-12-01
