基于GPS的无人机天线自动跟踪系统
2017-07-10 10:27郭倩倩周晓慧
计算机应用与软件 2017年6期
郭倩倩 周晓慧
(杭州电子科技大学信息与控制研究所 浙江 杭州 310018)
基于GPS的无人机天线自动跟踪系统
郭倩倩 周晓慧
(杭州电子科技大学信息与控制研究所 浙江 杭州 310018)
针对解决无人机飞行探测中定向天线跟踪问题,设计一种新型的基于GPS和单片机的天线自动跟踪控制系统。通过详细比较GPS跟踪的三种算法,确定圆球模型算法对于一定跟踪精度范围,可完全替代平面模型和椭球模型,减少了计算量。根据圆球模型算法对系统软硬件进行开发与设计,系统通过无人机通信数据链获取无人机的位置信息,结合系统自身的GPS位置信息、罗盘的方位信息,运用圆球模型算法计算出天线需转动的方位角和俯仰角,通过单片机控制天线对准无人机。实验测试结果表明,对于10公里范围内的跟踪,系统的跟踪精度满足设计的要求,具有较强的实用价值和推广意义。
无人机 GPS 天线 跟踪
0 引 言
近年来无人机作为一种新型的探测工具得到了国家和社会各界的较大关注。在无人机飞行过程中,无人机与地面站之间通过无人机通信数据链传输数据,通信数据链分为上行链路和下行链路。上行链路是地面站将对无人机的控制信息使用Mavlink(Micro Air Vehicle Link)协议打包后,通过天线发送至无人机控制器,无人机控制器根据协议解包后响应控制信息。下行链路是无人机控制器将飞行数据打包,和采集的图像编码后,一并通过天线实时回传给地面站数据接收系统。因此,天线信号的强弱直接影响到无人机飞行的稳定性和采集图像的质量。目前,天线自动跟踪方法有步进跟踪、圆锥扫描跟踪、单脉冲单通道跟踪和程序跟踪等[1-4]。其中步进跟踪方法设备简单,价格低廉,但其天线波束不能停留在被跟踪目标的方向上,而是在目标方向周围不停地摆动;圆锥扫描跟踪方法是驱动天线在空间中做圆锥式扫描以获取最大信号电平,从而得到目标角误差信号,但由于馈源永远是偏离天线抛物面的焦点,因而天线的增益大大降低[5];单脉冲单通道跟踪方法的跟踪速度和精度比步进跟踪和圆锥扫描方法高,但设备复杂。对于无人机来说,程序跟踪是一种简单高效的跟踪方法,文献[6]运用椭球模型算法计算无人机的位置信息,文献[7]提出用圆球模型计算相对地理位置。椭球模型是目前应用比较广泛的一种模型,但计算量比圆球模型大。本文比较了以上两种算法和同样应用广泛的平面模型,确定圆球模型在无人机跟踪的一定精度范围内,完全可以替代椭球模型和平面模型,并设计及开发了天线跟踪系统的软硬件。经实验测试,对于10公里范围内的跟踪,系统跟踪性能良好,维护方便。
1 系统整体设计
天线自动跟踪系统由控制器部分、数据收发部分组成,如图1所示。

图1 天线跟踪系统组成示意图
系统通过天线模块,将平板定向天线接收到的无人机飞行数据送入主控制器进行分析处理,提取无人机当前位置的经度、纬度、海拔信息。同时采集本系统的GPS数据、电子罗盘数据,得到系统所处地理位置的经纬度和海拔信息。根据无人机和系统的两组GPS数据计算出平板定向天线需转动的角度,控制系统的水平伺服电机和俯仰伺服电机,使天线对准无人机。在控制天线转动的同时,系统将接收到的数据通过WiFi发送到周围的地面控制站,保证无人机与地面控制站的正常通信。
2 跟踪系统算法
平面模型、圆球模型和椭球模型是三种常用的跟踪算法,通过获取系统和目标点的位置信息,运用跟踪算法计算出天线的方位角和俯仰角。本系统距目标点的最远距离限制为10 km,海拔高度差为200 m,系统选用的天线波瓣宽度为10°,因此方位角和俯仰角的计算误差需小于一个数量级,即1°。
设A点为观测点,其大地坐标为(B0,L0,H0),G为目标点,其大地坐标为(B1,L1,H1),其中B0、B1,L0、L1,H0、H1分别表示A、G两点的纬度、经度和海拔高度。G在地面上的投影点为B,设N为真北方向,地球半径为R,方位角的计算,以真北为0°起点,由东向南向西顺时针旋转360°。
2.1 平面模型
平面模型是将球面上已知经度、纬度的两个点分别看做平面直角坐标系中的两个坐标点,对两点的经度、纬度分别做差,差值作为两边的长度,再利用反正切函数计算得方位角。方位角计算公式为:
(1)
根据球面上两点之间距离公式:
d=Racos(sin(B0)sin(B1)+cos(B0)cos(B1)cos(L1-L0))
(2)
将球面距离作为直线距离计算目标点G相对于观测点A的俯仰角:
(3)
2.2 圆球模型
圆球模型如图2所示。

图2 圆球模型
把地球近似为一个圆形球体,设二面角B-ON-A为∠ON,弧AB是A、B两点的球面距离,AN′方向为A点所在处的正北方向,面PAN′是A点的参考水平面[7],则∠PAG为天线的仰角,设为γ,∠N′AP(即球面三角形ABN中的∠A)为方位角,设为θ,则根据三面角余弦公式:
cos(n)=cos(a)cos(b)+sin(a)sin(b)cos(∠ON)
(4)
将已知数据带入得:
cos(n)=cos(90°-B1)cos(90°-B0)+sin(90°-B1)sin(90°-B0)cos(L1-L0)
(5)
根据球面正弦公式:
(6)
得方位角:
(7)
做面AGO沿AGO的横切面,根据横切面的三角形正弦定理,得俯仰角:
(8)
2.3 椭球模型[11-13]
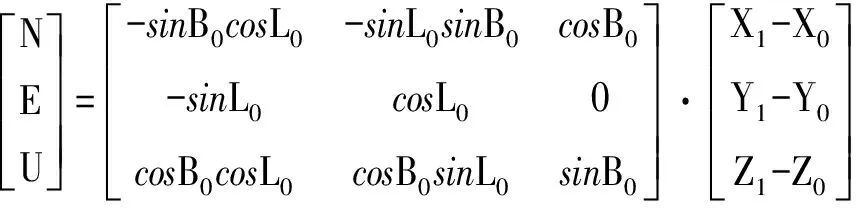
采用的坐标系为左手站心地平直角坐标系,椭球模型如图3所示。左手站心地平直角坐标系是以测站法线(切平面)和子午线方向为依据的坐标系,以观测点天线位置A为原点,以站心A点的法线为Z轴(指向天顶为正),在切平面上以子午线方向为X轴(向北为正),Y轴与X、Z轴正交(向东为正),构成左手站心地平坐标系,记为A-NEU。图中以椭球中心O为原点,起始子午面与赤道面的交线为X轴,椭球的短轴为Z轴(向北为正),在赤道面上与X轴正交的方向为Y轴(向东为正),构成右手直角坐标系O-XYZ。设A、G两点的空间直角坐标分别为(X0,Y0,Z0)、(X1,Y1,Z1),对同一空间,直角坐标系与大地坐标系参数间的转换关系如下:
(9)
式中,L、B、H为地心大地坐标;N为参考椭球的卯酉圈曲率半径;e为第一偏心率。

图3 站心地平直角坐标系与空间直角坐标系
(10)
则方位角为:
θ=tg-1(E/N)
(11)
俯仰角为:
(12)
2.4 三种模型的比较
对以上三种模型,首先在理论上作比较,以北半球作为参考,图2中的A、G点分别在低、中、高低纬度选取不同的四组数据,并且保证观测点和目标点之间的距离在10 km以内,海拔差值在200 m以内,计算方位角和俯仰角,结果见表1所示。
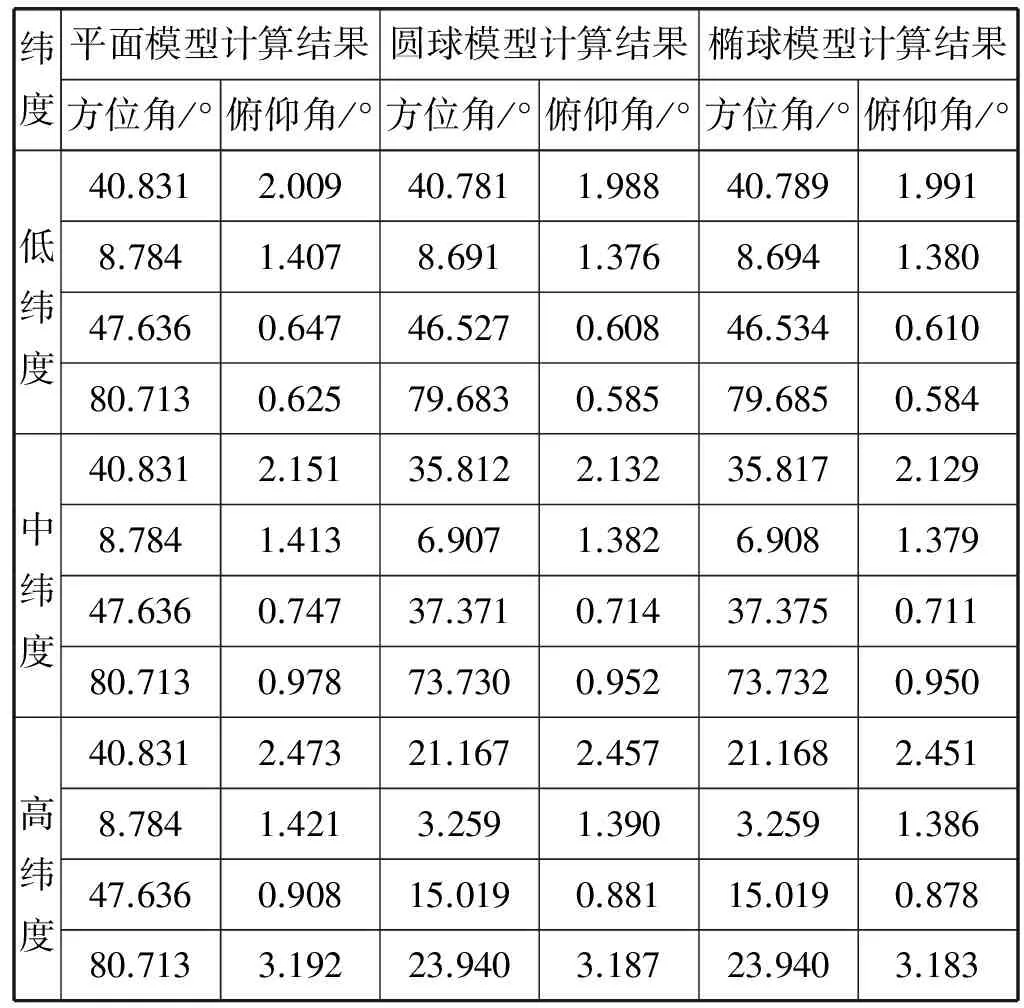
表1 三种模型计算的方位角及俯仰角比较
由表1的计算结果得出,在低纬度地区,利用平面模型计算的方位角与椭球模型计算的方位角的误差已经超过1°,利用圆球模型计算的结果接近于椭球模型,在低中高纬度地区,误差均小于1°。由于椭球模型涉及到矩阵运算,计算量大,对处理器的性能要求较高,并考虑系统可测范围相对地球表面空间来说距离短,高度低,因此初步选择圆球模型作为本系统的跟踪算法来计算平板定向天线需转动的方位角和俯仰角,此方案实际飞行中是否可行,需进一步飞行试验验证。
3 系统软硬件设计
系统控制器主要由主控制器、位置信息采集模块、伺服控制模块组成,可以进行高精度的位置信息采集与处理,并控制水平和俯仰伺服电机的转动,俯仰伺服电机的可控制角度为0~100°,水平伺服电机则可进行360°连续旋转控制,实现了对无人机的全方位跟踪控制。
3.1 主控制器
考虑所选算法的运算量,主控制器采用意法半导体公司的32位单片机STM32F107,其搭载的Cotex-M3内核,采用拥有独立指令总线和数据总线的带有分支预测的3级流水线哈佛结构。工作频率最高能达到72 MHz,在存储器的0等待周期访问时可达1.25 DMIPS/MHz,而且具有定时器、通用串行收发器UART、集成总线IIC、以太网模块等多种外设支持[8],完全满足系统需求,而且其成本低,可靠性高,应用广泛。
3.2 位置信息采集模块
位置信息采集模块主要由电子罗盘和GPS两部分组成,电子罗盘用于方位角的采集,GPS部分用于位置信息采集。
考虑算法对航向精度的要求和室外温差变化大,-20~40 ℃都会使用,所以电子罗盘选择带温度补偿的霍尼韦尔公司的HMC5983芯片,该芯片内置驱动电路,体积小,带温度补偿,低干扰AMR传感器与12位ADC可达到2毫高斯分辨率,测量精度可达到1°。其与主控制器通过IIC(Inter-Integrated Circuit(内部集成电路总线))通信,使用简单。
GPS选用最新的u-blox公司的NEO-M8Q天线模组,NEO-M8Q能够同时获取跟踪不同的GNSS(全球导航卫星系统):并行接收GPS(QZSS)和GLONASS或北斗,或同时接收GLONASS和北斗。此模组专门适用于即使在GPS信号差的环境下(如城市峡谷)都需要最高的可用性和准确性的性能应用。NEO-M8Q模组的功耗较低,冷启动速度快,定位精度可达到0.5~1 m,满足要求不是很高的测绘级使用要求。根据官方解决方案,设计电路如图4所示。

图4 GPS模块电路图
在测试中发现,周围环境对GPS天线的干扰比较大,而且在建筑物较多的地方,GPS信号较弱,因此,在GPS天线部分增加一个滤波放大电路,使用官方推荐的SKY65709GPS天线专用信号滤波放大芯片,原理如图5所示。

图5 GPS信号滤波放大电路
3.3 伺服控制模块
系统伺服控制模块可看成一个二自由度的云台,控制平板定向天线的水平旋转和俯仰转动。云台的转动部分可以选择直流电机、步进电机、舵机。直流电机需要配合编码器实现定位,结构复杂,而且直流电机需要设计驱动电路,增加系统成本。步进电机直接输入PWM脉冲个数,无需驱动电路,就可以实现一定角度的转动,但是步进电机的定位是相对于前一位置,负载较大时使用会出现丢步,长时间使用会累积误差,精度较低。而舵机控制直接使用PWM的脉冲宽度就可以控制舵机转动角度,属于绝对定位,没有累积误差,同步进电机一样,无需驱动电路。因此,选择舵机控制云台转动。
考虑控制精度、负载扭矩以及室外使用的环境,本系统选用春天SE-C4413V舵机,其重量仅为70 g,防水设计,可全天候使用,供电电压7.4 V,最大输出扭矩为25.6 kg·cm,最大转速为400 °/s。舵机的转角控制主要采用PID控制器来实现,PID控制具有算法简单、鲁棒性好、可靠性高等优点,被广泛用于工业过程控制中。本舵机伺服控制系统采用电流环、速度环、位置环的三闭环控制方案[9-10],如图6所示。其中电流环采用PI控制,可以提高系统的快速性,及时抑制电流环内部的干扰;速度环采用P调节,可以减小舵机调节过程中的振荡和超调;位置环的设计是整个控制系统的关键,它密切关系到系统的跟踪性能与静态精度,采用PID参数自整定控制。

图6 舵机工作原理框图
3.4 软件设计
软件设计部分以C语言为开发语言,系统工作流程设计模式如下:
1) 自检模式:系统开机后,进入自检模式,旋转校准电子罗盘,校准结束后,系统旋转几个固定位置,如正东仰角30度,正北仰角60度等,验证系统各部件性能是否正常,是否可以正常工作。
2) 自动模式:系统自检后,处于待机状态,按下启动工作按键,系统进入自动模式。
3) 搜索模式:当系统没有及时跟踪到无人机,无人机超出天线收发角度范围,系统无法获取无人机位置,此时系统自动切换为搜索模式,水平方向均匀设置12个位置,每个位置垂直方向舵机从0度到90度再回到0度,直到搜索到无人机信号为止。
4) 手动模式:当系统遇到角度计算错误、舵机出现故障等突发情况时,可以按下手动模式按键进入手动模式,此时舵机没有输入信号,系统可以手动调整角度,而其他模块均正常工作。
根据系统功能需求,工作流程如图7所示。
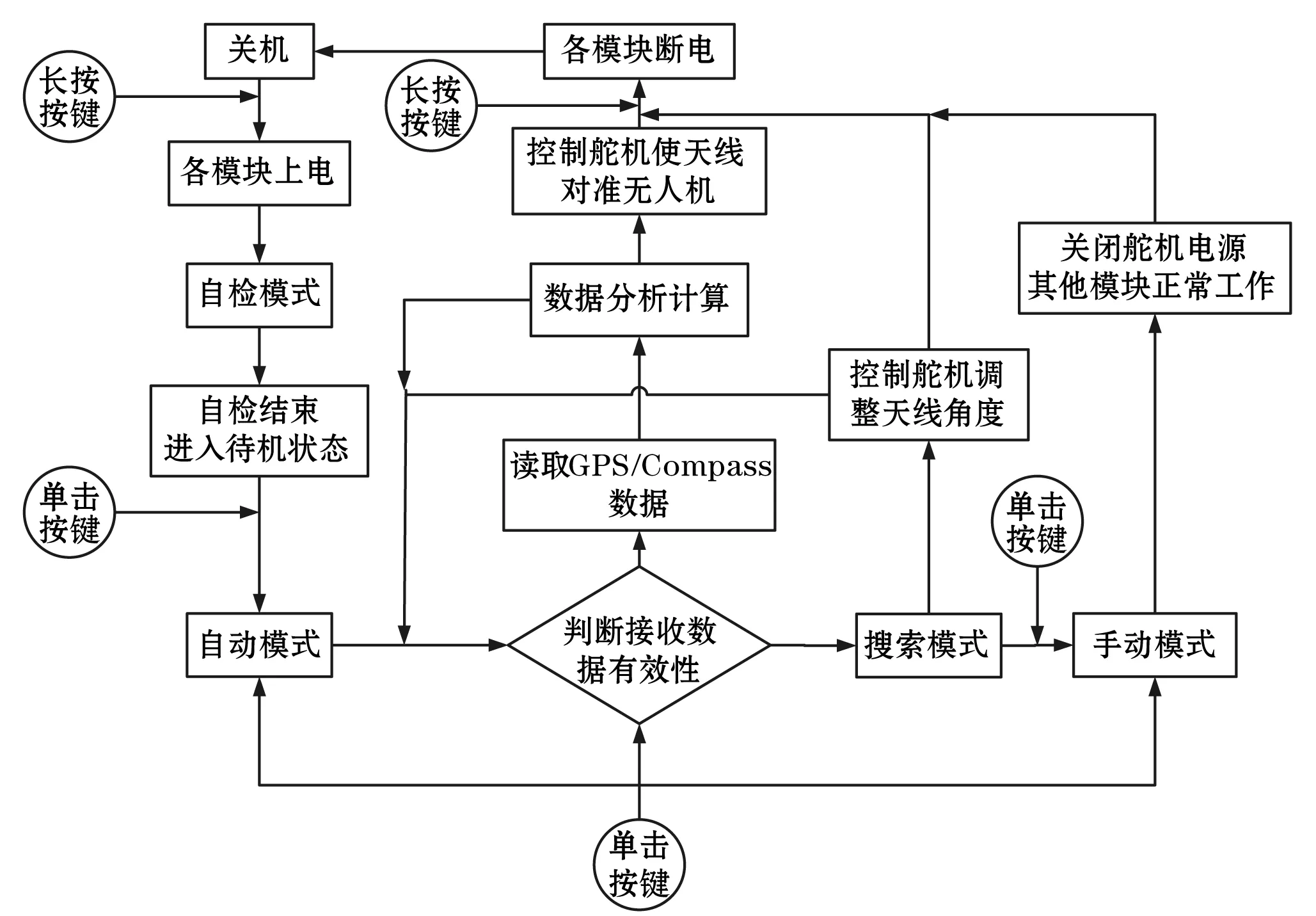
图7 工作流程图
4 实验测试
对系统进行无人机飞行跟踪的反复试验测试,选取其中的一段飞行数据,经数据分析得天线跟踪的俯仰角和方位角,并结合无人机实际的飞行数据,对比结果如图8、图9所示。

图8 俯仰角跟踪比较

图9 方位角跟踪比较
经飞行测试证明,系统的天线跟踪情况良好,虽然有延时存在,但误差不超过5°,能保证信号和图像的传输质量,此实验也进一步证明了本系统选择圆球模型来计算采集位置信息的方案是可行的。
5 结 语
本系统的设计,针对无人机飞行过程中的实际要求,选用低成本单片机、传感器、舵机,结合GPS定位技术,实现天线自动跟踪。系统硬件设计简单,跟踪程序高效可靠,通过模拟飞行实验证明,圆球跟踪算法对于本天线跟踪装置是满足要求的,可以满足数公里范围内的无人机天线跟踪需求,是具有实际应用价值的天线跟踪装置。
[1] 李正周,赵峰,杨士德,等.基于梯度法的对空中目标搜索与跟踪[J]. 系统仿真学报, 2007, 19(5): 1078-1081.
[2] Han K, Guo W, Gao X. A step tracking on the SOTM[C]//IEEE International Conference on Computer Science and Information Technology. IEEE, 2010:214-216.
[3] 钟水和, 王建, 潘尧成,等. 单通道单脉冲跟踪系统自动校相的设计与实现[J]. 四川兵工学报, 2015, 36(7):97-99.
[4] 查长流, 丁希仑, 俞玉树,等. 无人机定向天线自跟踪系统研究[J]. 北京航空航天大学学报, 2016, 42(4):737-744.
[5] 孙兴邦. 卫星天线自动跟踪算法的研究[D].大连:大连海事大学, 2008.
[6] 黄伟, 周乃恩, 王诚,等. 一种无人机通信天线伺服系统的构建[J]. 电子技术应用, 2009, 35(6):98-101.
[7] 杜利明, 柴海莉.基于GPS信息的天线自跟踪设计[J].微计算机信息, 2008, 24(9-1):243-244.
[8] 沈建良, 贾玉坤, 周芬芬, 等.STM32F10X系列ARM微控制器入门与提高[M]. 北京:北京航空航天大学出版社, 2013: 1-7.
[9] 肖业伟, 吴称列, 王正强, 等. 基于电动舵机优化控制的仿真研究[J].计算机仿真, 2015, 32(11): 321-324.
[10] 岳明凯, 李志霞, 王欣. 模糊PID算法的火箭弹舵机控制方法研究[J].沈阳理工大学学报, 2012, 31(3):68-72.
[11] 季凯敏, 王解先. 利用大地坐标计算真方位角的两种方法[J]. 工程勘察, 2009(4): 84-86.
[12] 徐绍铨, 张华海, 杨志强, 等. GPS测量原理及应用[M]. .武汉:武汉大学出版社, 2003: 11-14.
[13] 李宗春, 李广云, 薛志宏, 等. 地球站天线方位/俯仰角严密计算方法的研究[J]. 无线电通信技术, 2003, 29(6): 30-32.
UAV ANTENNA AUTOMATIC TRACKING SYSTEM BASED ON GPS
Guo Qianqian Zhou Xiaohui
(InstituteofInformationandControl,HangzhouDianziUniversity,Hangzhou310018,Zhejiang,China)
A new automatic tracking and control system based on GPS and single chip is designed to solve the problem of directional antenna tracking in unmanned aerial vehicle (UAV) flight detection. By comparing the three algorithms of GPS tracking in detail, it is confirmed that the sphere model algorithm can completely replace plane model and ellipsoid model for certain range of tracking accuracy, and reduce the calculation amount. The software and hardware of the system are developed and designed according to the sphere model algorithm. The system obtains the position information of unmanned aerial vehicles (UAVs) through unmanned aerial vehicle (UAV) communication data link. Combining GPS position information and azimuth information of compass, the azimuth angle and pitch angle of the UAV are calculated by ball model algorithm. Through the single-chip control antenna aligned unmanned aerial vehicles. The experimental results show that the tracking accuracy of the system meets the design requirements for the tracking within 10 km, which has strong practical value and popularization significance.
UAV GPS Antenna Tracking
2016-04-25。浙江省公益项目(2015C34008)。郭倩倩,硕士生,主研领域:控制科学与工程。周晓慧,教授。
TP391
A
10.3969/j.issn.1000-386x.2017.06.017
猜你喜欢
结构工程师(2022年2期)2022-07-15
导航定位学报(2022年2期)2022-04-11
智能制造(2021年4期)2021-11-04
空间科学学报(2020年4期)2020-04-22
现代计算机(2018年19期)2018-08-01
制造技术与机床(2017年9期)2017-11-27
北京航空航天大学学报(2017年3期)2017-11-23
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
——彩色的小圆球
琴童(2016年1期)2017-01-16
人生十六七(2015年13期)2015-11-16