维纳滤波在模糊控制自动倒车GPS导航中的应用
2017-07-18 11:48张宇婷胡金艳谢欣欣
无线互联科技 2017年11期
张宇婷,胡金艳,谢欣欣
(西京学院,陕西 西安 710123)
维纳滤波在模糊控制自动倒车GPS导航中的应用
张宇婷,胡金艳,谢欣欣
(西京学院,陕西 西安 710123)
随着汽车的快速发展,小车已成为多数家庭的代步工具,同时倒车问题也得到了广泛的关注。文章是通过模糊控制器来控制小车自动泊车,但是由于GPS定位中包含许多误差源(噪声),使得定位精度不精确,从而影响到汽车在自动泊车过程中的模糊控制器,使小车不能高效地倒入目标位置。为了解决由于噪声而产生的GPS导航误差,文章所采用的方法是通过维纳滤波来消除噪声,从而提高小车的倒车性能,最终得出实验结果并对结果进行分析。
GPS导航;模糊控制;自动泊车;维纳滤波
1 系统结构
图1中(x,y),(x′,y′)分别为小车起始位置中心点坐标与结束位置中心的坐标,φ为小车航向角(车体与水平方向的夹角),θ为小车方向盘的转角。
原理:假设小车起始位置的中心点与结束位置的中心点坐标分别为(x,y),(x′,y′),小车航向角(车体与水平方向的夹角)为φ。由于GPS定位中包含许多误差源(噪声),使得经过GPS定位后起始和结束位置的中心点坐标分别变为(),(′),小车的航向角φ变为。由于GPS定位不精确而出现误差,使得小车不能够精确倒入指定目标位置,所以在定位后加入维纳滤波,可对定位进行去噪作用,经过维纳滤波后坐标,分别变为,,变为ˆ,这样就会利用经过维纳滤波去噪的作用使误差减少,再将经过维纳滤波后的坐标发送到控制器中,控制器通过控制小车方向盘θ转动的角度大小,控制小车能够最大程度倒入指定位置。

图1 系统结构框架
2 模糊控制原理
如图2所示,小车在一个100×100的平面内,小车的起始位置可以任意或者固定某一点,通过测得小车的状态量(x,θ,Φ) 来控制小车,最终使其倒入(50,100)的位置。
x和y分别为小车尾部中点的横坐标与纵坐标,Φ是小车中轴线与水平线的夹角,顺时针为正θ为汽车中轴线与前轮的夹角,顺时针转动为正。x,θ,Φ的范围分别为:0≤x≤100,-30≤θ≤30,-90≤Φ≤270 。模糊控制器的设计如图3所示。
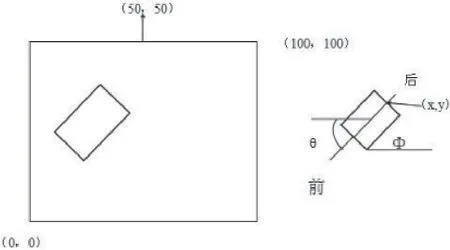
图2 测量小车状态量控制小车倒入特定位置示意

图3 模糊控制原理
3 模糊控制原理步骤
将经过维纳滤波后的坐标作为模糊控制器的输入,根据输入值和模糊控制器的输出反馈值,计算所选择的输入变量的确定值。
将模糊控制器输入量的确定值通过模糊化处理,使其转换为相应的模糊语言变量值。这一过程实际上是一个精确量模糊化的过程。
模糊语言变量通过模糊规则和模糊推理计算出输出的模糊控制量,一般采用IF A THEN B的形式来描述。
最后通过解模糊将计算出输出的模糊控制量计算为精确的输出量。这是一个将模糊量精确化的过程。
4 输出性能比较
将小车的起始和结束位置确定后,假定加入一个均值为0,方差为2的高斯白噪声,选取100个小车GPS定位误差数值,通过MATLAB编程对小车在倒车时没有噪声、有噪声无滤波和有噪声有滤波3种情况的输出性能进行比较,输出性能的好坏通过MATLAB仿真来比较。小车运动轨迹仿真如图4—6所示。

图4 小车原始运动轨迹

图5 有噪声无滤波的小车运动轨迹

图6 有噪声有滤波的
5 结果分析
由图1—6实验结果可知小车倒车运动轨迹在小车GPS定位中无噪声时最好,有噪声有滤波时小车倒车运动轨迹次之,有噪声无滤波时小车运动轨迹最不平稳。通过以上实验分析可知小车的输出性能在无噪声时最好,但此类情况在现实生活中并不可取,由于噪声的加入使得小车在倒车过程中输出性能下降,但是在对小车的输入控制量加 入维纳滤波后,小车的输出性能明显提高。
6 结语
本文主要介绍的是维纳滤波在模糊控制自动泊车GPS导航中的应用,通过MATLAB平台下的编程,最终得出实验结果并对结果进行比较分析,通过实验结果可知小车在模糊控制自动泊车GPS导航中有噪声时,可通过维纳滤波来去除噪声,提高小车的输出性能。
[1]莱昂斯,朱光明,程建远,等.数字信号分析与处理[M].西安:陕西人民教育出版社,2003.
[2]赵红怡,张常年.数字信号处理及其MATLAB实现[M].北京:化学工业出版社,2002.
[3]张铮.MATLAB程序设计与实例应用[M].北京:中国铁道出版社,2003.
[4]王惠南.GPS导航原理与应用[M].北京:科学出版社,2003.
[5]黄丽.卡尔曼滤波在车载组合导航系统中的应用[D].上海:上海交通大学,2009.
[6]李燕青.基于模糊理论的自动倒车控制器的研究[D].杭州:浙江工业大学,2007.
Application of wiener fi ltering in fuzzy control of automatic reversing GPS navigation
Zhang Yuting, Hu Jinyan, Xie Xinxin
(Xijing University, Xi’an 710123, China)
Car has become a means of transport for most families with the rapid development of the car, at the same time reversing problem has been widespread concern. The article uses fuzzy controller to control automatic parking of car, but because the GPS positioning contains many error sources(noise), so that the positioning accuracy is not accurate, which affects the fuzzy controller in automatic parking in the process, so that the car can’t ef fi ciently reverse into the target position. In order to solve the GPS navigation error caused by noise, the method used in this paper is the wiener fi lter to eliminate the noise, so as to improve the performance of the car reversing, fi nally obtains the experimental results and they are analyzed.
GPS navigation; fuzzy control; automatic parking; wiener fi ltering
张宇婷(1991— ),女,陕西西安,硕士研究生;研究方向:模糊控制卡尔曼滤波自动倒车。
猜你喜欢
汽车实用技术(2023年10期)2023-06-14
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年7期)2022-04-20
军民两用技术与产品(2020年3期)2020-04-07
舰船电子对抗(2019年4期)2019-09-10
太原科技大学学报(2019年3期)2019-08-05
计算机应用与软件(2017年3期)2017-04-14
洛阳师范学院学报(2017年2期)2017-03-12
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17