利用弯曲模态的惯性直线超声电机结构设计
2017-07-18 11:49张阳阳姚志远张亚飞
振动与冲击 2017年13期
张阳阳, 姚志远, 张亚飞
(南京航空航天大学 机械结构力学及控制国家重点实验室, 南京 210016)
利用弯曲模态的惯性直线超声电机结构设计
张阳阳, 姚志远, 张亚飞
(南京航空航天大学 机械结构力学及控制国家重点实验室, 南京 210016)
针对惯性直线超声电机输出力小、结构不稳定的问题,通过改进其结构的振动方式,提高其输出力和结构稳定性。提出了一种新的结构惯性直线超声电机,该电机采用矩形板结构,利用其弯曲振动;分析该电机的工作原理,并利用了ANSYS workbench对定子的结构振动仿真分析,设计和制作了惯性直线超声电机。样机的实验表明:它有较宽的工作频率,运行稳定;在工作频率为23.6 kHz时,最大运行速度为197 mm/s;在工作频率为23.2 kHz时,最大推力为7.3 N,惯性直线超声电机的驱动方向会在某一频率点突变。
超声电机; 惯性直线超声电机; 弯曲振动
超声电机(Ultrasonic Motor, USM)是一种新型微特电机,它是利用压电材料的逆压电效应,激发弹性体(定子)的振动,并通过定、转子(动子)之间的摩擦作用将振动转换成转子(动子)的旋转(直线)运动。它具有位置和速度控制性好,位移分辨率高,不产生磁场,亦不受外界磁场干扰,能断电自锁,且具有较大的保持扭矩的优点,在精密驱动、生物医学工程领域有着广泛的应用前景[1]。
惯性式直线型超声电机具有体积小、重量轻、精度和分辨率高、响应快,并且只需要一种模态就能驱动,同一个电激励信号就可实现双向运转的优点,但是,由于其输出力小,限制了它的应用[2-3]。国内对于惯性式超声电机的研究非常少,参考文献[4]研究了一种惯性式的压电电机,该电机定子主要由定子轴和复合压电换能器组成,动子为一带有缺口和环形凹槽的环。该电机的驱动主要是基于位移放大原理,复合压电换能器加上方波激励信号后,激发出层叠式压电陶瓷堆伸缩变形,从而引起定子轴沿轴向方向往返速度不同的振动。惯性式直线型超声电机与该专利的相同之处在于都是利用惯性力来驱动动子,不同之处在于,超声电机利用的是压电陶瓷激发定子的共振来驱动动子,而该专利是通过压电叠堆的方式来得到定子轴的振动[5-9]。
现有的惯性式电机采用了结构纵向振动为工作模态,其振动效率低、输出力小。通常板结构的弯振是比纵振更低阶的模态,它具有更大振动能量;弯振模态具有典型的峰谷特点,便于在节点处夹持,它更适合作为电机的定子结构[10-13]。
本文在惯性式压电电机的基础上,提出了一种利用弯振模态的惯性直线超声电机,该电机有两个兰杰文振子且为板式结构,分析了该超声电机的结构和工作机制,并且用有限元软件分析了该电机的模态和响应,研制了惯性直线超声电机的样机,并通过实验研究其运行特性。
1 电机结构与工作机制
1.1 电机结构
板式惯性直线超声电机的结构如图1所示,该装置由定子、底板、动子组成。定子中前端块、夹持件、后端块和陶瓷片用螺栓链接组成一个兰杰文振子,为矩形板结构。夹持件上的通孔和底板之间用螺栓链接。动子为一个有缺口的圆环,可以通过螺栓保证与驱动杆有一定的预紧力。振子的振动采用矩形板的一阶弯曲振动,其压电陶瓷安置在弯振模态的波峰处,两个兰杰文振子通过柔性铰链连接且对称放置,可以同时推动驱动杆在对称轴上运动。夹持件的通孔远离驱动杆,其目的是在共振时增大驱动杆的振动幅度。

图1 惯性直线超声电机结构
1.2 电机的驱动原理
本文采用的压电陶瓷上下分区极化,极化方向如图2所示,在受到激励后一端收缩,另一端膨胀,激发振子的弯曲振动,进而带动子前进。如图3所示的激励信号,在状态A,环形动子处于初始位置。当激励电压由A变化到B时,两个振子发生面内弯振带动驱动杆向前运动,环形动子在静摩擦力的作用下和驱动杆一起平稳地向上移动一定距离Δd,当激励电压快速降落到C时,驱动杆向下运动,由于环形动子的惯性力克服了滑动摩擦力,而没有跟随驱动杆向下移动,而是继续向前运动。在CD段驱动杆和环形动子的运动方向相反,环形动子由于摩擦作用而向前运动一定距离Δd后停止。当激励电压到DE段,动子又向前移动一段距离Δd,如此周而复始,逐步积累位移,从而实现了动子沿驱动杆向上的连续步进运动。电机的具体运行方式如图4所示。
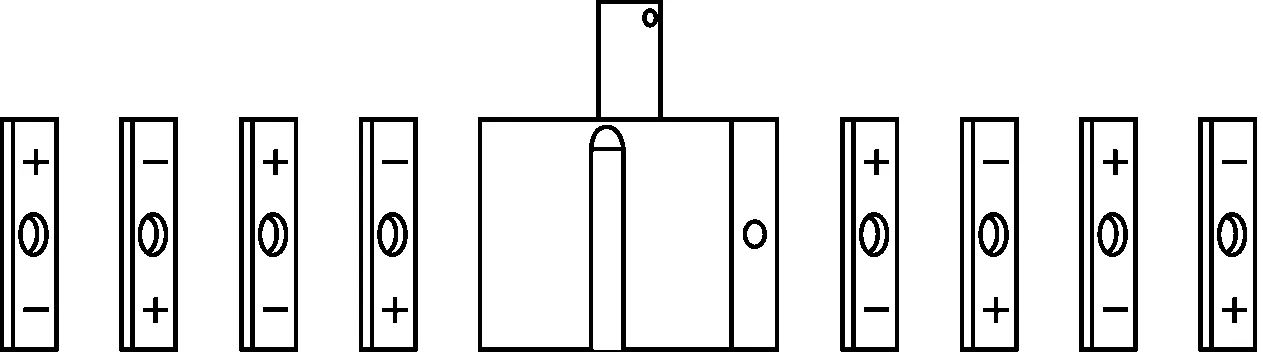
图2 压电陶瓷的极化方向
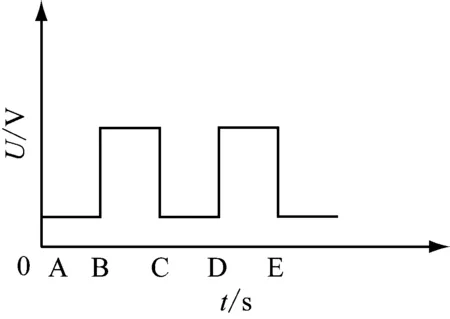
图3 方波电压
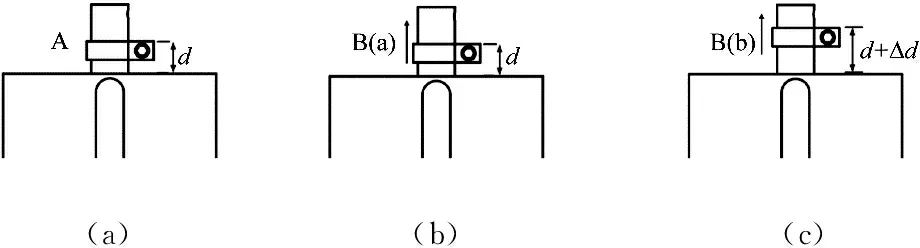
(a)(b)(c)
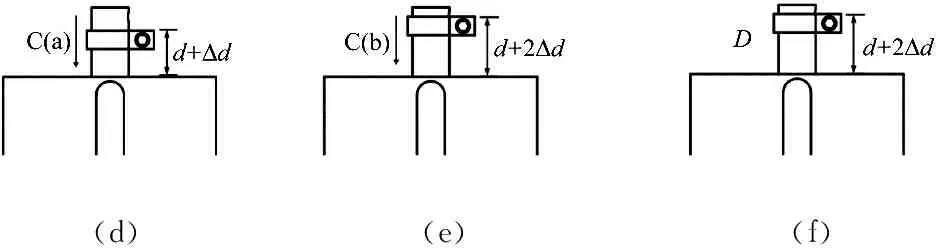
(d)(e)(f)
图4 电机运行机理
Fig.4 The motor running mechanism
2 电机有限元仿真
利用Ansys workbench软件对惯性式超声电机进行模态分析、谐响应分析。模态分析可以确定超声电机的定子工作时的振动模态和确定超声电机的工作频率范围。而谐响应分析可以判断定子特定的模态能否被激发,可以得到定子振动的幅频曲线和相频曲线。图5为网格化后的有限元模型。
在workbench中采用的单元类型为solid186,压电陶瓷材料采用solid227,矩形板为不锈钢材料。模型的尺寸如表1所示,边界条件为自由边界,采用分块Lanczos法进行模态提取。一阶弯振的振型如图6所示。

表1 模型尺寸
该惯性式超声电机采用的模态为一阶弯振,模态分析结果显示,一阶弯振模态的频率较低,为22.56 kHz。
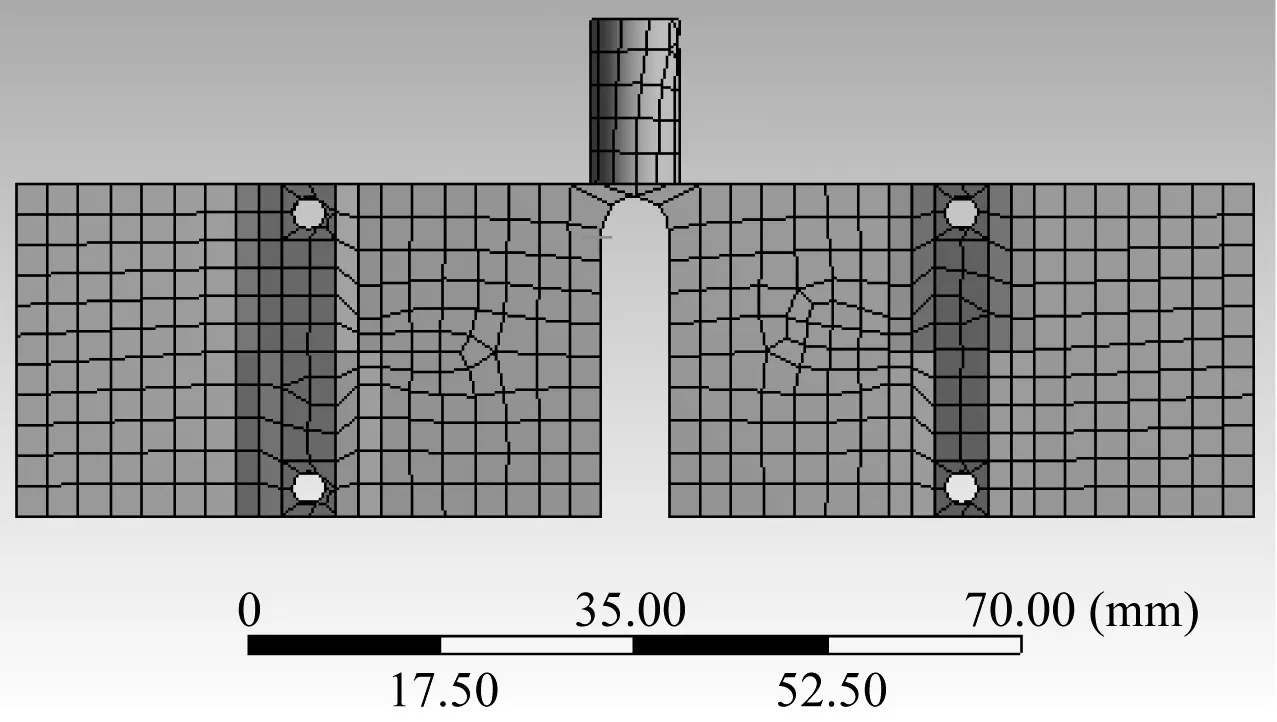
图5 网格化的模型

图6 弯振振型
利用workbench进行谐响应分析时需要导入压电模块,压电材料的的压电常数和介电常数如表2所示,压电陶瓷的极化方向如图2所示。边界条件为固定约束,采用full法进行分析,加载的电压为200 V,惯性电机的幅频曲线和相频曲线如图7和图8所示。

表2 压电材料常数

图7 幅频曲线
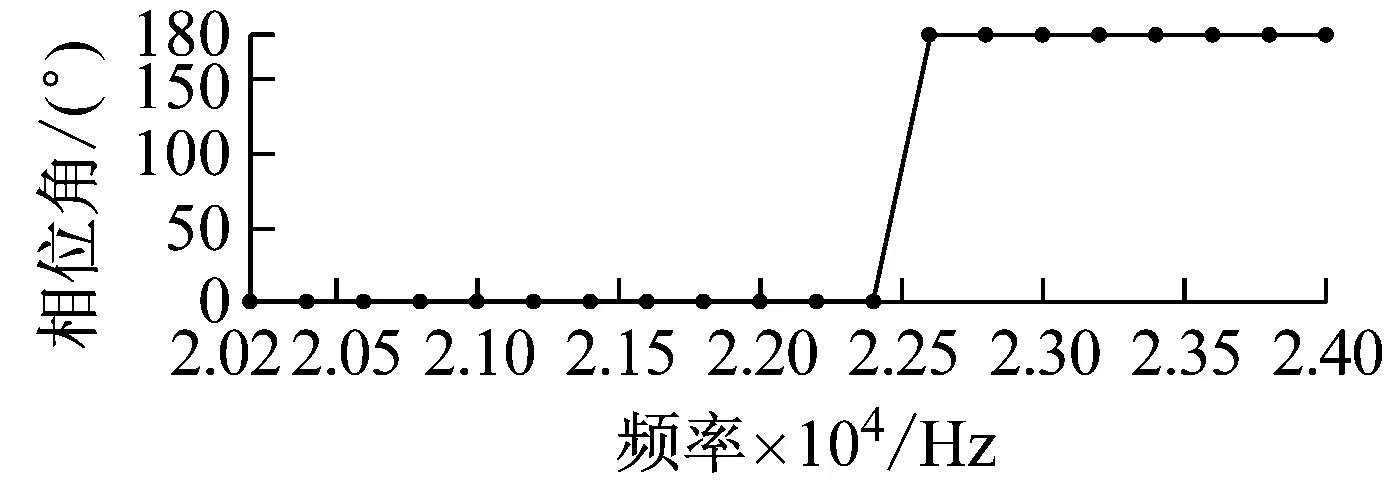
图8 相频曲线
谐响应分析表明,在信号Asin(2πft)激励下,结构振动的响应为Bsin(2πft+φ)。通常,φ与激励频率有关。如图7和图8所示,当f<22.6 kHz时,φ=0;当f>22.6 kHz时φ=180°。
3 机械特性实验
3.1 扫频实验
由于该惯性式超声电机是对称结构,取其中的一半进行扫频实验。扫频结果如图9所示,共振响应峰值有两个,分别为24.3 kHz、26.0 kHz,分别对应的是对称模态和反对称模态,振型如图10所示,该惯性电机利用的模态为对称模态,在频率24.3 kHz附近驱动效果好。

图9 扫频实验结果

(a)频率24.3kHz振型(b)频率26.0kHz振型
图10 共振峰对应的振型
Fig.10 Vibration modes in formant
3.2 驱动速度和负载实验
惯性直线超声电机不同于以往的两相正交模态叠加的超声电机,因为它只用单项激励就可以驱动电机运动。为了测试电机的运动规律,利用AFG3022B信号发生器、HFVA-153功率放大器和LK-H150激光测速仪测定动子运动速度与激振频率的关系。实验连接图如图11所示。

图11 激光测速实验
激励频率变化范围为22.9~24.4 kHz,采用的方波电压条件为200 V。测速仪得到的结果如图12所示,在频率23.6 kHz左右两侧,动子的运动速度发生反向,最大速度为197 mm/s,实验也表明惯性直线超声电机的驱动方向受激励信号的振动频率影响,当激励频率小于共振频率时电机沿一个方向运动;当激励频率大于共振频率时电机沿反向运动。结合实验和图7、图8幅频曲线和相频曲线分析表明,在共振频率附近,结构响应产生180°的相位差,这种相位差的不同会导致电机的反向运动。
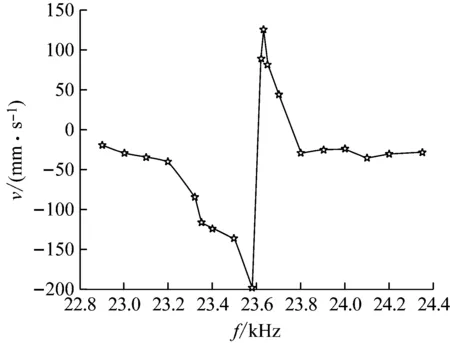
图12 激光测速实验结果
采用吊砝码的方式测量定子的负载大小,负载实验是分两步完成的,在频率22.8~23.6 kHz时,动子向里走,电机的放置位置如图13所示,此时动子可以拖动吊篮上升。在频率23.6~24 kHz时,动子向外走,此时将电机旋转180°,该力的结果取的是力的绝对值,动子的最大驱动力为7.3 N,实验结果如图14所示。
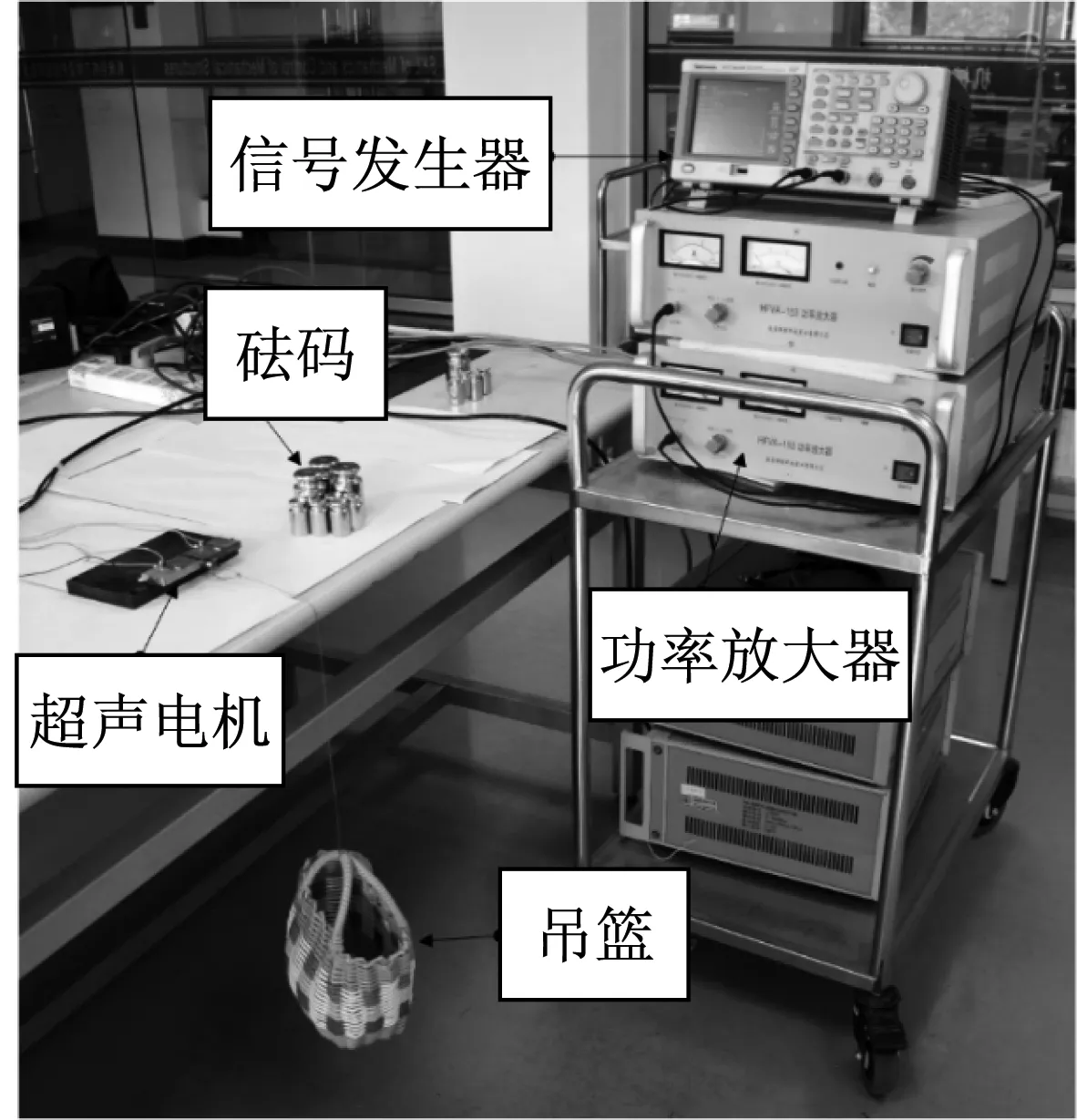
图13 负载实验

图14 负载实验结果
4 结 论
本文提出了一种新型的惯性直线超声电机,它的定子为两个兰杰文振子组成的对称板式结构,有利于提高电机的输出力和运行稳定性。该电机采用的模态为板式结构的一阶弯振,弯振驱动的电机能量大,输出力大,在技术上是一种创新,同时弯振具有稳定的节点,便于夹持。它利用动子的惯性力克服摩擦力产生相对运动前进,只需要单项激励就能驱动动子的往返运动,因此也具有驱动电路简单的特点。
利用有限元软件分析了惯性直线超声电机的模态和响应,并且制作了该电机的样机,然后进行了机械特性实验,实验表明,该电机可在22.9~24.4 kHz范围内工作,运行稳定,电机的共振频率为24.3 kHz。在工作频率为23.6 kHz时,最大运行速度为197 mm/s,在工作频率为23.2 kHz时,最大推力为7.3 N。
惯性直线超声电机的驱动方向会在某一频率点突变,根据扫频实验的结果分析,电机运动方向突变的原因与结构响应的相位差有关。
[1] 赵淳生.超声电机技术与应用[M].北京:科学出版社,2007:1-22.
[2] 赵淳生,朱华.超声电机技术的发展和应用[J].机械制造与自动化,2008,37(3):1-9.
ZHAO Chunsheng,ZHU Hua.Development and application of ultrasonic motors technologies[J]. Machine Building & Automation, 2008, 37(3):1-9.
[3] 赵淳生,李朝东.日本超声电机的产业化、应用和发展[J].振动、测试与诊断,1999,19(1):1-7.
ZHAO Chunsheng,LI Chaodong. Industrialization, applications and development of ultrasonic motors in Japan[J]. Journal of Vibration, Measurement & Diagnosis, 1999, 19(1):1-7.
[4] 金家楣,时运来,李玉宝,等.新型惯性式直线超声压电电机的运动机理及实验研究[J].光学精密工程,2008,16(12): 2371-2377.
JIN Jiamei,SHI Yunlai,LI Yubao,et al. Research on novel inertial linear ultrasonic piezoelectric motor[J]. Optics and Precision Engineering,2008,16(12):2371-2377.
[5] 李向华,陈超,赵淳生.非接触式直线型超声电机的振动分析[J]. 振动与冲击,2010,29(7):149-152.
LI Xianghua,CHEN Chao,ZHAO Chunsheng. Vibration studies of non-contact linear ultrasonic motor[J]. Journal of Vibration and Shock,2010,29(7):149-152.
[6] 周胜利,姚志远.直线超声电机定/动子接触的微观力学模型[J].振动与冲击,2012,31(20):90-93.
ZHOU Shengli,YAO Zhiyuan.Micromechanic model for contact between a linear ultrasonic motor’s stator and mover[J].Journal of Vibration and Shock, 2012,31(20):90-93.
[7] 郭辉,李迅波,李华峰. 面内模态方形压电超声电机的工作机理与实验[J].振动与冲击,2009,28(12):68-70.
GUO Hui,LI Xunbo,LI Huafeng. Prototype experiment and working mechanism analysis of square ultrasonic motor based on in-plane mode[J]. Journal of Vibration and Shock, 2009,28(12):68-70.
[8] EDOUARD L, LOZADA J, HAFEZ M.A curved ultrasonic actuator optimized for spherical motors: design and experiments[J]. Ultrasonics, 2014,54(6):1610-1619.
[9] BOLBORICI V, DAWSON F P, PUGH M C. A finite volume method and experimental study of a stator of a piezoelectric traveling wave rotary ultrasonic motor[J]. Ultrasonics,2014,54(3):809-820.
[10] MASHIMO T. Micro ultrasonic motor using a one cubic millimeter stator[J]. Sensors and Actuators A Physical,2014,213(7):102-107.
[11] JEONG S S, PARK J K, PARK T G.Speed and torque characteristics of three-phase ultrasonic motor[J]. Ferroelectrics,2014, 466(1):110-118.
[12] SHI Jingzhuo,YOU Dongmei. Characteristic model of travelling wave ultrasonic motor[J]. Ultrasonics,2014,54(2):725-730.
[13] KIM J W,PARK C H,LIM J H,et al. Driving characteristics of octagon-type ultrasonic motor[J].Springer,2013,20(1):71-75.
Structural design for inertial linear ultrasonic motors using bending modes
ZHANG Yangyang, YAO Zhiyuan, ZHANG Yafei
(State Key Laboratory of Mechanics and Control of Mechanical Structures,Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)
The inertial linear ultrasonic motors have disadvantages, such as, small output forces and unstable structures. However, their output force and structural stability can be improved by modifying vibration modes of their structure. Here, a new structural design of an inertial linear ultrasonic motor was proposed. A rectangular plate structure was adopted for the motor to use its bending vibration modes. Then, the working principle of the motor was analyzed and the vibration of the stator was simulated and analyzed with ANSYS workbench software. Finally, the inertial linear ultrasonic motor was designed and manufactured. Tests of its prototype indicated that the motor has a wider working frequency range and its operation is stable; when the working frequency is 23.6 kHz, the maximum operation speed of the motor is 197 mm/s; when the working frequency is 23.2 kHz, the maximum thrust force of the motor is 7.3 N; the driving direction of the inertial linear ultrasonic motor has an abrupt change at a certain frequency point.
ultrasonic motor; inertial ultrasonic motor; bending vibration
国家自然科学基金(51275229);国家重大仪器设备开发专项(2012YQ100225);研究生创新基地(实验室)开放基金(KFJJ20150102)
2016-01-08 修改稿收到日期:2016-04-11
张阳阳 男,硕士生,1991年10月生
姚志远 男,博士,教授,1961年6月生
TM359.4
A
10.13465/j.cnki.jvs.2017.13.006
猜你喜欢
仪表技术与传感器(2022年4期)2022-05-31
中国特种设备安全(2022年1期)2022-04-26
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
陶瓷学报(2021年4期)2021-10-14
中学生数理化·八年级物理人教版(2021年3期)2021-07-22
陶瓷学报(2021年3期)2021-07-22
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
陶瓷学报(2020年6期)2021-01-26