双信号切换多胞系统的鲁棒变增益控制
2017-07-19 10:05郑斌峰董朝阳
沈阳航空航天大学学报 2017年3期
郑斌峰,董朝阳,王 青
(北京航空航天大学 a.航空科学与工程学院,b.自动化科学与电气工程学院,北京 100191)
航空宇航工程
双信号切换多胞系统的鲁棒变增益控制
郑斌峰a,董朝阳a,王 青b
(北京航空航天大学 a.航空科学与工程学院,b.自动化科学与电气工程学院,北京 100191)
针对变体飞行器在大包线内变形飞行的姿态镇定问题,提出了一种基于双信号切换的鲁棒变增益切换控制方法。在分析飞行器跨包线区域变形飞行特性的基础上,基于多胞权值速率有界约束给出了时变参数多胞系统稳定的充分条件,进一步研究了飞行器具有包线和构型双信号切换多胞系统的特征,分析了跨包线区域变形飞行的稳定性;设计了鲁棒变增益切换控制器,从而保证系统在包线内的稳定性及鲁棒H∞性能。
变体飞行器;切换多胞;双信号;鲁棒变增益
变体飞行器是一种可以根据自身需求主动改变气动外形,始终保持在各个飞行阶段(如起降、巡航、盘旋、作战、加速等)获得最佳气动外形,以保证飞机随时保持最优飞行性能,适应多种任务模式[1-2],比如F-111、苏-24以及NASA的MAW项目[3]、AFW项目[4]、AAW项目[5]等。随着智能材料的发展,变体飞行器又一次成为学者们关注和研究的焦点。德国科技公司Festo的科学家声称“破译了鸟飞行的原理”,成功研制出仿生机器鸟-SmartBird[6-8]。同时,变体飞行器外形可变的特征给结构、气动和控制等多个学科提出了一系列具有挑战的研究课题[9-11]。在控制科学方面,关键是解决变体飞行器姿态控制系统设计的问题,以确保大包线飞行下的姿态稳定[12-13]。
近年来,针对多胞型时变参数系统的分析与控制问题,国外研究学者取得了一定的成果。Daafouz等分析了具有多胞描述形式的离散线性时变系统的稳定性,并基于参数依赖Lyapunov函数方法得到了参数任意变化情况下的结论。由于飞行器在正常情况下不会发生包线参数的突变,因此参数任意快变对应的稳定性条件仍然具有一定的保守性[14]。部分学者采用多胞建模方法处理有界参数变化速率,并得到连续时变多胞系统的稳定性条件[15]。但是这种对有界参数变化速率的多胞描述方法在实际应用中仍然较为复杂,因此本文在权值速率具有常值上界的假设下,给出了参数慢变多胞系统稳定的充分条件,并作为变体飞行器大包线变形飞行稳定分析的基础。
1 变体飞行器切换多胞建模
本文结合变体飞行器的变形特性提出了一种双信号切换多胞系统方法,其中,对于不同飞行区域的处理与文献[16]类似,仍将其分为多个局部重叠的多胞系统;对于机体变形,将其构型变化视作一类链式切换,并在传统切换多胞系统切换信号σF(t)的基础上,引入独立的链式变形切换信号σM(t),得到形如式(2)的双信号切换多胞系统,使得系统的各个多胞型具有二维指标,即对于某一多胞型子系统,其分别具有代表包线区域属性和飞行器构型属性的两个指标,且各自服从不同的切换规律。
上述切换规律将变体飞行器大包线变形飞行中可能经历的多胞型子系统按类进行了排列,在原有的包线区域划分基础上,为每一个子区域增加设置了变形构型属性,并使得所有多胞型子系统形成了一类矩阵式的子系统集。给出一种双信号切换多胞系统的子系统划分,假设变体飞行器的全包线按照包线参数被分为6个子区域F1~F6,按照后掠角分为15°、20°、25°、30°、35°、40°、45°、50°、55°、60°共10个典型构型,系统的子区域同样具有局部重叠特性,且各个子区域均标注了可以采用的变形构型,从而使得飞行器可以按照允许的不同构型在某一固定子区域内进行变形飞行,也可以进行跨区域变形飞行。
(1)
变体飞行器在大包线内的长时间飞行均在不同的典型构型状态下进行,因此,对于包线内的某一高度和马赫数区域,可以构建基于不同飞行器构型的多个多胞系统,将此类多胞系统记为Θi, j,其中i∈ΩM={M15,M20,…,M60}为该多胞系统的构型指标,j∈ΩF={F1,F2,…,FN}为多胞系统的包线区域指标,q∈Θi,j为该多胞系统的顶点指标。进而,可以将大包线内不同构型下的变体飞行器建模为如下的切换多胞系统。
(2)




(3)

大包线跨区域变形飞行的具体时序图如图1所示,当飞行至两区域交界处某点时,如图1中Fi-1和Fi重叠区域某工作点,可以切换控制增益的计算方式,由多胞系统Fi-1顶点增益插值切换为多胞系统Fi顶点增益插值。

图1 跨区域变形飞行时序图
(4)
由于在重叠区域附近飞行时,临近顶点的加权权重较大,且这部分顶点由Fi-1和Fi共有,故这类切换不会引起系统的抖振,实现了平滑切换。与变形切换过程占据较短时间不同的是,跨区域切换仅在某一时刻改变控制器增益计算方式,该切换点可以选在固定构型阶段的某一时刻,并避免在变形过程中切换包线区域,实际上由于变形时间较短,这一做法是很容易实现的,能够更方便地分析稳定性和计算控制增益。综上所述,可以得到研究对象模型(2)中的矩阵如式(4)所示。
2 控制器设计
2.1 基于权值速率有界的时变参数多胞系统稳定性
定理1 对于时变参数多胞系统(3),令u(t)≡0,如果存在一组正定矩阵Pi>0和常数γ>0,使得∀i,j∈{1,2,…,N},i≤j,下列线性矩阵不等式组成立
Φi,j+Φj,i<0
(5)
(6)
其中
(7)
则系统(3)参数依赖二次稳定且具有H性能指标γ。
2.2 跨区域变形飞行稳定性
在分析跨区域变形飞行的稳定性时,同样采用Lyapunov函数方法,由于飞行器在包线区域内飞行时间较长,可以采用驻留时间方法保证系统的渐近稳定性。由于各个包线区域参数差别较大,采用驻留时间或平均驻留时间方法均容易给设计过程引入较大的保守性,这里通过包线依赖驻留时间概念分析系统的稳定性条件。
(8)
(9)
(10)
(11)
其中
(12)
(13)

(14)
在各个包线区域内飞行的包线依赖驻留时间满足
(15)
则变体飞行器以局部重叠切换律σF(t)跨包线区域,并以链式切换律σM(t)做变形飞行时,系统参数依赖二次稳定且具有H性能指标γ。
2.3 大包线变形飞行鲁棒变增益控制
下面通过定理形式给出变体飞行器双信号切换多胞系统鲁棒变增益控制器设计方法。
(16)
(17)
(18)
(19)

(20)
(21)

(22)
在各个包线区域内飞行的包线依赖驻留时间满足
(23)
则存在如下形式的鲁棒变增益控制器:
(24)
其中
(25)
使得当变体飞行器以链式切换律σM(t)做变形飞行时,系统参数依赖二次稳定且具有H性能上界γ。
证明:由定理2的证明过程易知,当系统具有变增益控制结构时,上述定理条件能够满足系统的参数依赖二次稳定性和H性能上界要求,即控制增益阵如下:
(26)
又由切换多胞系统表述可知,系统的变增益控制器有如下特殊结构:
(27)
3 算例与仿真验证
本节应用变体飞行器在包线内跨区域变形飞行的姿控系统仿真来验证双信号切换多胞系统鲁棒变增益切换控制。
以下对变体飞行器在包线内变形飞行过程进行仿真,首先给出包线的包络工作点。
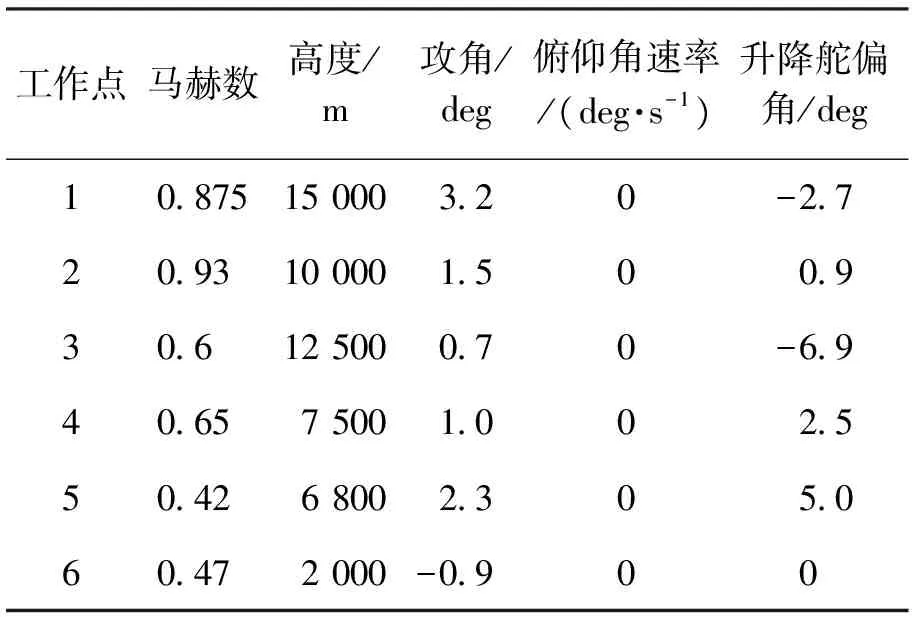
表1 变体飞行器包线内的6个工作点
选取如表1所示的6个工作点,并将其在飞行包线内的包络区域作为变体飞行器跨区域变形飞行的设计示例区域,将上述工作点集划分为两个子集F1={1,2,3,4}和F2={3,4,5,6},相应的可以得到包线内的2个子区域如图2所示,则可知上述子区域具有局部重叠特性,即F1∩F2≠φ。假设变体飞行器在包线内的飞行轨迹如图2中虚线所示,由t0=0 s时刻开始到tf=40 s时刻结束,整个过程历时40秒,且ts=20 s时刻其在工作点4处由子区域F1切换至子区域F2。同时,设变体飞行器在t1,t2,t3,t4分别进行机体变形,每次变形历时2秒,变形后以固定构型在包线内飞行至下一次变形点,在t5=35s时刻之后,保持飞行高度和马赫数不变至飞行结束,整个过程依次经历后掠角为60°,55°,50°,45°,40°的5种构型。
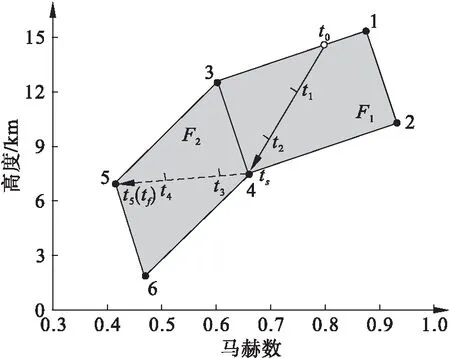
图2 包线区域划分
假设飞行器按照上述假设依次在相应的时间点达到飞行包线内的指定位置并完成预定的区域切换或构型切换,飞行高度和马赫数随飞行时间的变化曲线以及变形飞行的主要时间节点如图3所示。

图3 包线参数变化与飞行时序图

由选取的状态点可知,本文所使用的双信号切换多胞系统的子系统集为ΥΞ={〈F1,M60〉,〈F1,M55〉,〈F1,M50〉,〈F2,M50〉,〈F2,M45〉,〈F2,M40〉},且有各个子系统对应子区域的顶点个数均为4,即NF1=NF2=4。根据定理3给出各个设计参数的取值为如下:
ηF1=0.07,ηF2=0.095,μF1=1.21,μF2=1.27,κF1=1.83,κF2=1.76
(28)
另外,可以由式(22)计算得到系统在各个包线区域内的构型平均驻留时间如下所示:

仿真验证由“线性控制器+非线性模型”的结构完成,这里仅考虑纵向短周期运动的姿态镇定问题。给定仿真初始时刻的系统攻角为α0=3°,俯仰角速率为q0=0°/s,升降舵偏角为δe,0=4°,仿真时长40秒。仿真结果曲线如图4~9所示。
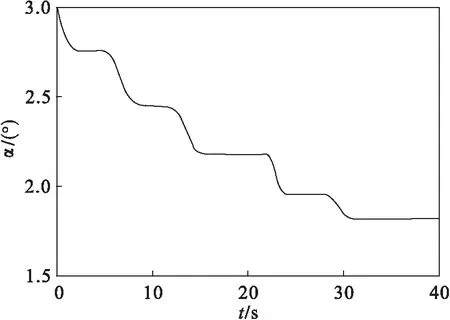
图4 攻角响应
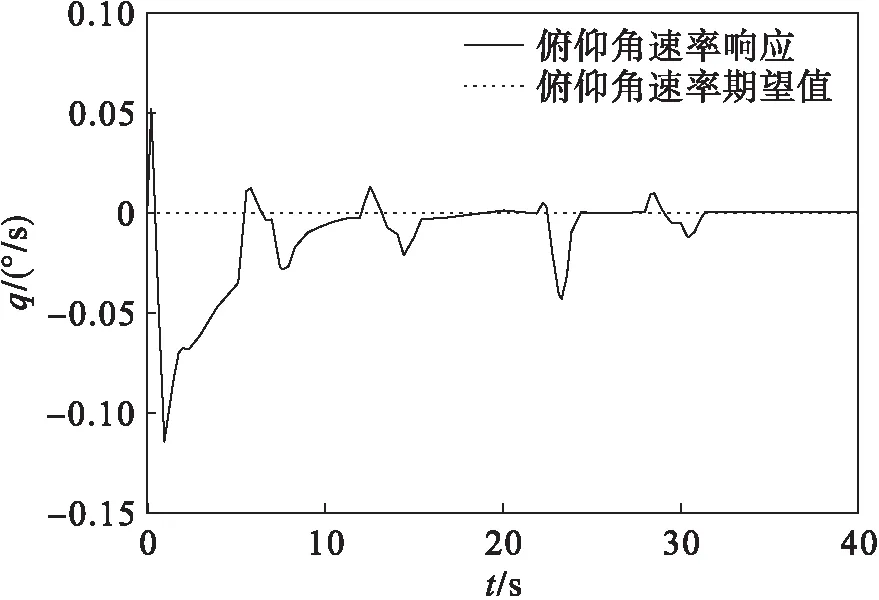
图5 俯仰角速率响应
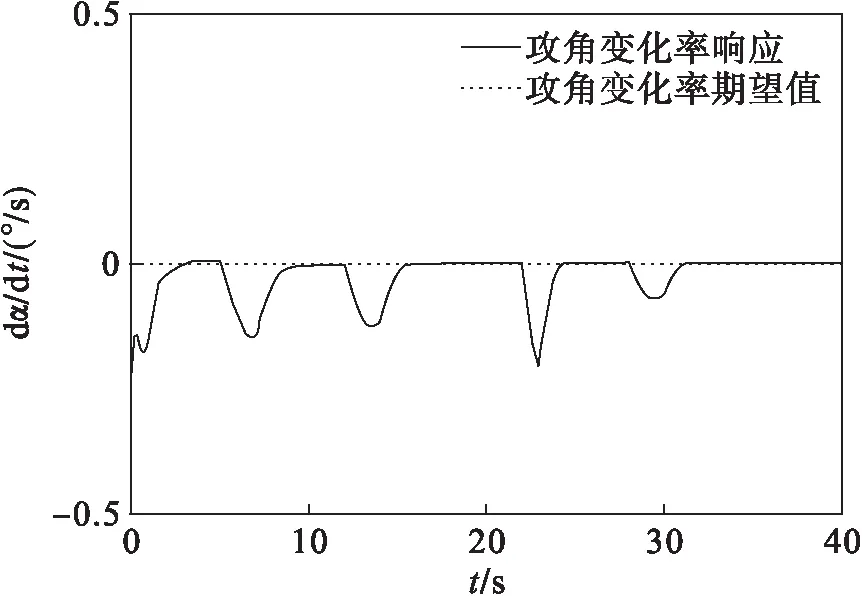
图6 攻角变化率响应

图7 俯仰角速率变化率响应
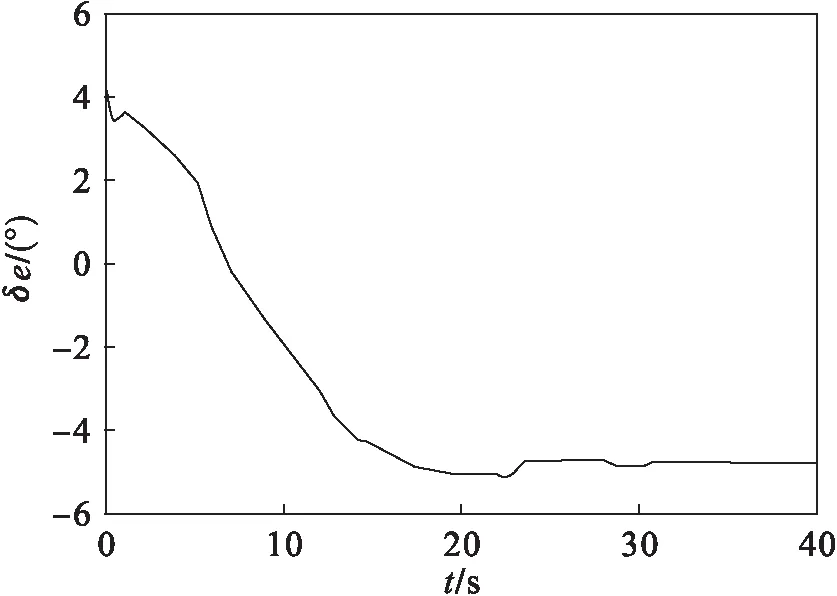
图8 升降舵偏角响应
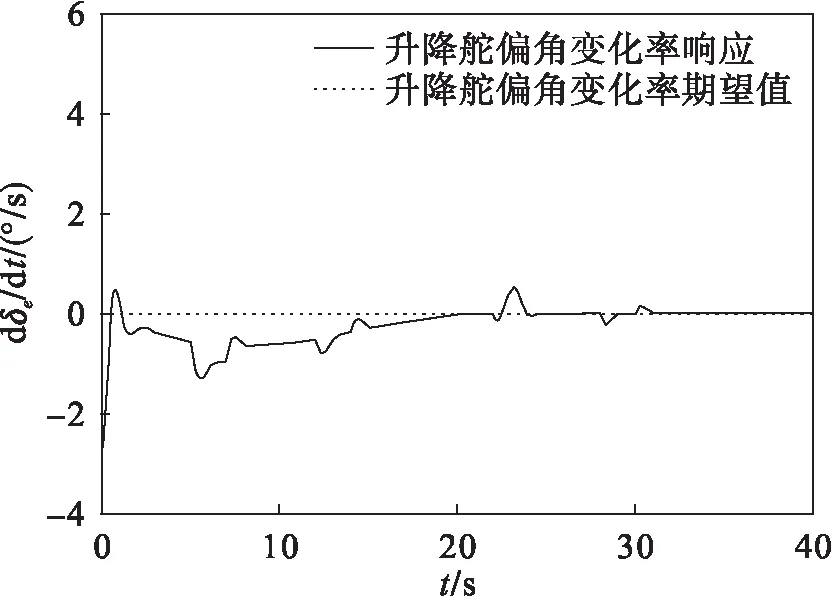
图9 升降舵偏角变化率响应
由仿真结果可知,变体飞行器姿态在所设计的切换多胞系统鲁棒变增益控制器作用下,由初始值收敛至平衡点,且随着机体构型和包线区域的切换始终收敛至不同的平衡状态。仿真中,飞行器构型和包线参数均是连续变化,由于双信号切换多胞系统的变增益控制作用,系统的状态响应也基本保持平稳连续的变化,仅在初始时刻和各次变形时刻产生较小抖动,且均在可接受的范围内。
4 结论
针对变体飞行器在大包线范围内快速变形飞行的情况,研究其姿态镇定控制问题。基于权值速率有界条件给出了跨区域变形飞行的稳定性条件,并提出了双信号切换多胞系统的鲁棒变增益控制器设计方法。
(1)在分析变体飞行器跨包线区域变形飞行特征的基础上,基于多胞权值速率有界约束给出了时变参数多胞系统稳定的充分条件;
(2)考虑变体飞行器具有包线和构型双信号切换多胞系统特征,分析了大包线内跨区域变形飞行的稳定性;
(3)提出了保证闭环系统稳定性及性能的鲁棒变增益切换控制器设计方法。
[1]RODRIGUEZ A R.Morphing aircraft technology survey[R].A2AA-2007-1258,2007.
[2]WEISSHAAR T A.Morphing aircraft systems:historical perspectives and future challenges[J].Journal of Aircraft,2013,50(2):337-353.
[3]陆宇平,何真.变体飞行器控制系统综述[J].航空学报,2009,30(10):1906-1911.
[4]B.OBRADOVIC,K.Subbarao.Modeling of dynamic loading of morphing-wing aircraft[J].Journal of Aircraft,2011,48(2):424-435.
[5]闫循良,王志刚,陈士橹,等.智能变形机翼无人机稳定与飞行控制研究[J].飞行力学,2008,26(5):20-24.
[6]PENDLETON E W,BESSETTE D,FIELD P B,et al.Active aeroelastic wing flight research program:technical program and model analytical development[J].Journal of Aircraft,2000,37(4):554-561.
[7]SEIGLER T M.Dynamics and Control of Morphing Aircraft[D].Virginia:Virginia Polytechnic Institute and State University,2005.
[8]黄鸣阳,肖天航,昂海松.多段柔性变体扑翼飞行器设计[J].航空动力学报,2016(8):1838-1844.
[9]MACKENZIE D.A flapping of wings[J].Science,2012,335(6075):1430-1433.
[10]YANG W Q,SONG B F,SONG W P,et al.The effects of span-wise and chord-wise flexibility on the aerodynamic performance of micro flapping-wing[J].Chinese Science Bulletin,2012,57(22):2887-2897.
[11]GUPTA H.Design and fabrication of a flapping wing unmanned aerial vehicle with bird kinematics[J].Journal of Aerospace Engineering & Technology,2014,4(2):9-21.
[12]SEIGLER T M,NEAL D A.Modeling and flight control of large-scale morphing aircraft[J].Journal of Aircraft,2007,44(4):1077-1087.
[13]DARIO H BALDELLI,DONG-HWAN LEE,RICARDO S,et al.Modeling and control of an aeroelastic morphing vehicle[J].Journal of Guidance,Control and Dynamics,2008,31(6):1687-1699.
[14]DAAFOUZ J,BERNUSSOU J.Parameter dependent Lyapunov functions for discrete time systems with time varying parametric uncertainties[J].Systems & Control Letters,2001,43(5):355-359.
[15]CHESI G,GARULLI A,TESI A,et al.Robust stability of time-varying polytopic systems via parameter-dependent homogeneous Lyapunov functions[J].Automatica,2007,43(2):309-316.
[16]HOU Y Z,WANG Q,DONG C Y.Gain scheduled control:switched polytopic system approach[J].Journal of Guidance,Control,and Dynamics,2011,34(2):623-629.
(责任编辑:吴萍 英文审校:赵欢)
附 录
1.定理1的证明过程
证明 正文中的系统(3)参数依赖二次稳定且具有H性能指标γ的充分条件是存在参数依赖矩阵函数P(ρ(t))>0,易知其成立的充分条件是
(1)
且
(2)
(1)先证正文中式(5)保证附录式(1)成立,用diag(P-1(ρ(t)),I,I)对附录式(1)进行全等变换,同时定义
(3)
可以得到附录式(1)成立的充分条件是
(4)
(5)
则可知附录式(1)成立的充分条件是
(6)
即
(7)
其中,Φi,j如正文中式(7)所示。再证明正文中式(6)是附录中式(7)成立的充分条件,由正文中式(4)可知
Φi,i<0,∀i=1,2,…,N
(8)
且
Φi,j+Φj,i<0,1≤i (9) (10) 由前述分析可知正文中式(5)是附录中式(1)成立的充分条件。 (2)再证明正文中式(6)保证附录中式(2)成立 (11) 则由正文中式(6)易知 (12) 综合(1)、(2)可知,定理条件正文中的式(5)、(6)是系统参数依赖二次稳定且具有H性能指标γ的充分条件。证毕。 2.定理2的证明过程 由上述证明可知定理2的条件保证系统在各个包线区域内飞行的时间段[ζi,ζi+1)内,有 又由正文中的式(11)条件可知,在包线区域切换时刻t=ζi处,有 (14) 分析系统的参数依赖Lyapunov函数,可得 (15) (16) 再分析系统的H性能,定理2的条件保证系统在各个包线区域内飞行的时间段[ζi,ζi+1)内,有 (17) 对上式左端以[ζi,ζi+1)为积分域进行积分,可得 (18) 同样对上式右端以[ζi,ζi+1)为积分域进行积分,可得 (19) 综合附录中式(17~19),可得 (20) (21) 分析系统跨包线区域飞行的过程,则由正文中的式(14) (15)可知 (22) 则可知系统具有H性能指标γ。证毕。 Robust variable gain control of dual-signal switched polytopic system ZHENG Bin-fenga,DONG Chao-yanga,WANG Qingb (a.School of Aeronautic Science and Engineering,b.School of Automation Science and ElectricalEngineering,Beihang University,Beijing 100191,China) Based on dual-signal switched polytopic system,a robust gain scheduled switching control scheme was proposed to deal with the problem of attitude stabilization during morphing within full envelop.The characteristics of morphing aircraft flight across multiple envelop regions were analyzed.The sufficient condition of stability for the time-varying polytopic system was proposed by the restriction of polytopic weights′velocity boundary.The specialty of the double switching signals in envelop regions and structures′ switching laws was further studied.The stability of morphing flight across multiple envelop regions were analyzed.The robust gain scheduled switching controller was designed to guarantee the stability and robust performance. morphing aircraft;switched polytopic;dual-signal;robust variable gain 2017-04-27 国家自然科学基金(项目编号:61374012) 郑斌峰(1985-),男,陕西乾县人,硕士研究生,主要研究方向:飞行动力学与控制,E-mail:sy1505427@buaa.edu.cn;董朝阳(1966-),男,河北平乡人,教授,主要研究方向:飞行动力学与控制,E-mail:dongchaoyang@buaa.edu.cn。 2095-1248(2017)03-0017-09 V249.1 A 10.3969/j.issn.2095-1248.2017.03.002




猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08
民用飞机设计与研究(2020年3期)2020-12-22
北京航空航天大学学报(2019年9期)2019-10-26
民用飞机设计与研究(2019年2期)2019-08-05
中国军转民(2018年2期)2018-09-10
北京航空航天大学学报(2017年10期)2017-04-20
北京航空航天大学学报(2017年10期)2017-04-20
邯郸职业技术学院学报(2016年2期)2016-02-27
云南师范大学学报(自然科学版)(2015年5期)2015-12-26