磁流变液制动特性测量实验装置研制
2017-07-26 01:29李津宁陈文娟
实验技术与管理 2017年7期
李津宁, 陈文娟
(中国石油大学(华东) 理学院, 山东 青岛 266580)
磁流变液制动特性测量实验装置研制
李津宁, 陈文娟
(中国石油大学(华东) 理学院, 山东 青岛 266580)
为研究磁流变液的制动特性设计了一种测量实验装置,该装置可通过控制外加磁场的大小来改变磁流变液的黏滞程度,从而控制制动过程。利用单片机采集制动过程中转速、制动时间以及线圈中励磁电流等参量,使用VB上位机对采集的数据进行处理并绘制出不同情况下的制动特性曲线。通过对各制动参量的理论分析与实验测量以探究磁流变液的制动特性。
磁流变液; 制动特性; VB上位机
磁流变液是1948年美国人Rabinow发现的一种黏度可控的流体,在没有外加磁场时它表现为流动性良好的牛顿流体,当外加磁场足够大时,其流动性完全消失并表现出类似固体的力学性质[1-3]。基于这种特性,磁流变液可被用来制作制动装置,这种制动装置中磁流变液在发生流变后可充当“制动蹄”产生制动力矩[4-6]。目前对磁流变液制动特性的研究多处于理论仿真阶段[7-10],很少有通过实验进行的研究,因此对磁流变液制动特性的实验研究十分必要。
1 磁流变液制动器装置原理
磁流变液制动器中,磁流变液的制动特性主要表现为制动器产生的制动力矩的大小,故可通过分析制动器所产生的制动力矩研究磁流变液的制动特性。现有磁流变液制动器的设计方式主要分为圆盘式和圆筒式[11],其中圆盘式应用较为广泛。本装置采用圆盘式设计,其原理图见图1。

图1 圆盘式磁流变液制动器原理图
图1中相距为H的2个圆盘之间充满磁流变液,转动圆盘C以角速度ω转动,产生流变效应的那部分磁流变液会形成类似圆盘的形状[12],设其半径为R,此时转动圆盘C会受到固定圆盘F通过磁流变液传递给C的力矩。H比较小时可以认为ω是沿x轴线性分布的,沿x轴的角速度ωx可以表示为
(1)

(2)
由固定圆盘F通过磁流变液传递给转动盘C的力矩T可表示为
(3)
式中τ是磁流变液产生的剪切应力。
根据大量实验表明,磁流变液在施加磁场时的行为可以用Binghan模型近似处理,其本构方程为[13]:
(4)
式中τx(B)是磁流变液产生的动态屈服应力,它与磁场强度B的大小有关,η为磁流变液处在没有磁场的情况下时的黏度。
由式(2)—(4)可得:
(5)
式(5)为磁流变液制动器产生制动力矩的理论公式。可以看出,在制动器的设计参数、制动圆盘的角速度以及磁流变液型号确定的情况下,制动力矩仅与磁场强度B有关,因此可以通过控制线圈励磁电流I来改变磁场强度B从而控制制动力矩。
2 测量实验装置设计
2.1 硬件设计
测量实验装置结构简图如图2所示,装置使用SG-MRF2035型磁流变液,它的零场表观黏度为0.24 Pa·s,磁导率为4.05×10-6N/A2。磁流变液制动器的设计图见图3,图中各参数值:R1=0.05 m,R2=0.082 m,R3=0.02 m,H=0.02 m,L=0.05 m,励磁线圈匝数n=2 725。装置实物图见图4。

图2 测量实验装置结构简图

图3 磁流变液制动器设计图
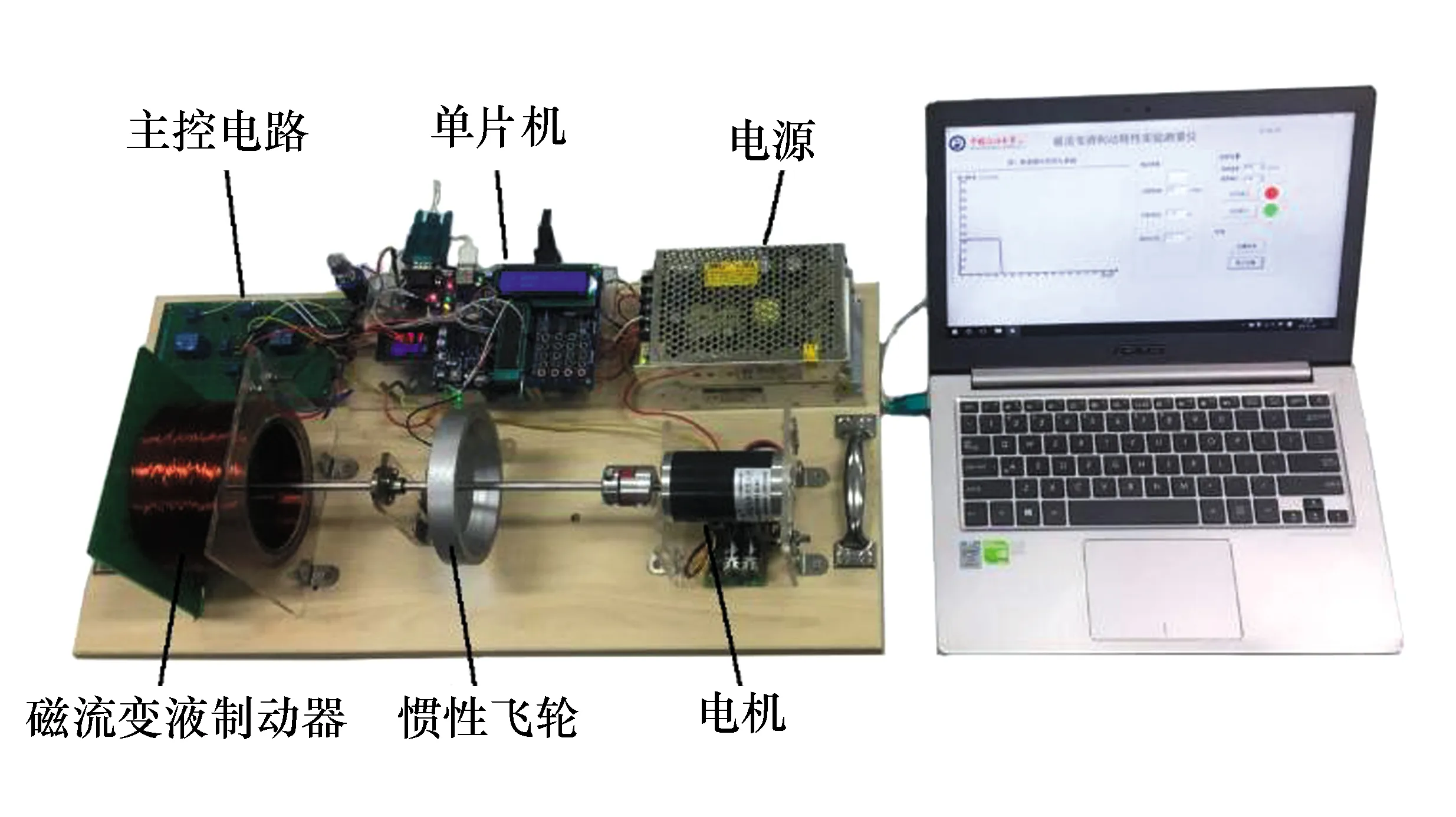
图4 磁流变液制动特性测量实验装置实物图
装置工作时,电机通过主轴带动模拟制动器负载的惯性飞轮转动,并且带动制动器内的制动圆盘一起转动。开始制动时,单片机切断电机的电源的同时控制直流电源给制动器的励磁线圈两端加所需电压;电流传感器采集流过线圈的电流大小,并将电流信息传递给单片机;霍尔转速传感器采集制动时惯性飞轮的转速,并将飞轮的转速信息传给单片机。单片机将采集到的所有信息上传给计算机,由计算机进行分析和处理。
2.2 软件的设计
本系统利用Visual Basic 6.0编写测控程序,程序主要包括主控模块、数据采集模块、图像绘制模块以及数据处理模块。其结构框图见图5。

图5 VB上位机功能结构框图
主控模块是整个系统的管理和控制模块,用于对系统软件的管理,包括设置数据采集的速率、端口等。主控面板见图6。

图6 上位机面板图
采集速率可以根据单片机的采样速率及发送速率进行设置,串口的选择由通信端口进行设置。数据采集模块接收由单片机采集到的转速、电流等数据在对应的文本显示窗口进行显示,绘图模块在图像显示窗口中实时绘制转速随时间变化的曲线,数据处理模块根据采集到的数据计算出制动开始时的速度、整个制动所需要的时间,从而方便对制动性能进行分析。
3 制动特性研究
3.1 制动参量的理论关系
制动器产生的制动力矩可以通过制动时间和飞轮转速计算得出,在忽略连接件摩擦力的情况下,飞轮所受到的制动力矩与制动器所产生的制动力矩相同,由此可以导出电流、制动时间和飞轮转速三者之间关系。本装置通过测量与分析这三者的关系对磁流变液制动特性进行研究。
将制动器看作长直螺线管,长直螺线管中心磁场B与螺线管所通电流I成线性关系[14]。经过实验测量,制动器内部中心磁感应强度B与通过励磁线圈的电流I的关系如下:
(6)
本装置使用的SG-MRF2035型磁流变液动态剪切屈服应力可表示为
(7)
由图3可以看出,制动圆盘受前后固定盘传递的力矩,由(5)式可得制动时制动圆盘所受到的制动力矩Ta大小为
(8)
将H=0.02 m,R=0.04 m,η=0.24Pa·s以及(7)式代入(8)式中可得到:
(9)
由式(9)可以看出,角速度ω对制动力矩影响较小,因此可以忽略不计。所以制动力矩的理论公式可以表示为
(10)
以下对惯性飞轮所受的制动力矩进行分析。设n为主轴的转速、Tb为惯性飞轮所受到的制动力矩。
刚体绕定轴转动的微分方程为[15]
(11)
式中,M为刚体所受力矩;Jb为刚体的转动惯量。

(12)
式中,Tb为飞轮所受力矩,N·m;Jb为惯性飞轮的转动惯量,kg·m2;n为主轴转速,r/min-1;t为时间,s。
当制动时间很短时,制动力矩的方程可以化简为
(13)
忽略装置连接部件之间的阻力,制动器产生的制动力矩与惯性飞轮受到的力矩相同,即Ta=Tb。Jb=9×10-4kg·m2,因此有
(14)
3.2 实验测试结果及分析
3.2.1 励磁电流与制动时间的关系
调节电机转速恒为200 r/min,调节励磁线圈两端的电压,得到一组对应的电流I与制动时间t的关系数据见表1。由公式(14)得到的励磁电流与制动时间的理论曲线与由表1实验数绘制的实际曲线见图7。

表1 励磁电流与制动时间关系数据

图7 励磁电流与制动时间关系曲线
如图7所示,励磁电流与制动时间的关系实际曲线与理论曲线趋势基本一致,但是在通入相同电流的情况下实际制动时间小于理论制动时间。存在偏差的主要原因有:制动时制动力矩不仅由磁流变液发生流变产生,装置上的接触点以及磁流变液本身的表观黏度也会产生一定的力矩,这就导致了制动时间小于理论制动时间。从图7中可以看出,当励磁电流较小时,实际的制动时间与理论制动时间相差较大,但是随着励磁电流的增大,实际制动时间接近理论制动时间,这是因为当励磁电流增大时,线圈会产生大量的热,这些热量会使磁流变液升温,从而降低磁流变液的表观黏度,使得由于磁流变液自身黏度产生的力矩减小,使得实际的制动时间接近理论制动时间。
3.2.2 转速与制动时间的关系
调节励磁线圈两端的电压,使制动时流过励磁线圈的电流恒定,大小为1 A,改变电机的转速,得到一组对应的转速n与制动时间t之间的关系数据见表2。由公式(15)得到转速与制动时间的理论曲线与由表2实验数绘制的实际曲线见图8。
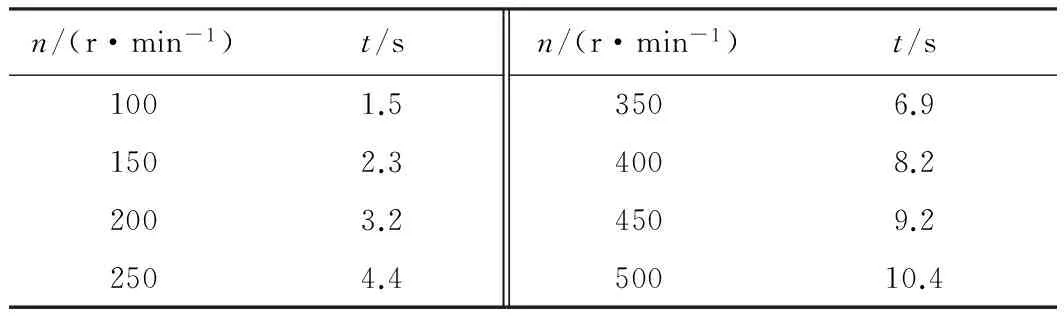
表2 转速与制动时间关系数据

图8 转速与制动时间关系曲线
由图8可知转速与制动时间的关系的实际曲线与理论曲线趋势基本一致,但是在转速相同的情况下实际的制动时间小于理论的制动时间。存在误差的原因也是由于磁流变液自身的表观黏度以及装置连结密封时的接触点产生的摩擦阻力所致;随着转速增大,实际制动时间与理论制动时间相差较大,这是由于随着转速增大,磁流变液的表观黏度产生的制动力矩越来越大,使得制动时间越来越短。
4 结语
本装置通过测量制动过程中的转速、制动时间和线圈励磁电流3个参量的变化关系对磁流变液的制动特性进行研究,并利用VB设计的上位机对采集的数据进行处理,绘制出不同情况下的制动特性曲线,直观地展示了磁流变液的制动特性。该装置结构简单、操作方便,既可用于演示磁流变液制动特性的实验教学,也可用于测试不同型号的磁流变液的制动特性,可为今后磁流变液制动器的研制提供数据支持,推进磁流变液制动器的实用化进程。
References)
[1] Rabinow. The magnetic fluid clutch[J].AIEE Transactions,1948,67: 1308-1315.
[2] 韩易言,何国田,林远长,等. 磁流变液磁性颗粒的研究进展[J]. 功能材料,2013,44(24):3513-3519.
[3] 魏齐龙,王超,罗清,等. 磁场作用下磁流变液的流变行为[J]. 磁性材料及器件,2013,44(1):6-9,43.
[4] 宋宇. 磁流变液ABS制动器结构研究与性能仿真[D].哈尔滨:东北林业大学,2011.
[5] 陈文娟,李津宁,刘凤祥,等. 磁流变液制动特性演示仪研制[J]. 实验技术与管理,2016,33(7):92-95.
[6] 田祖织. 磁流变液及其传动技术研究[D].徐州:中国矿业大学,2012.
[7] 刘旭辉. 车用自增力式磁流变液制动器研究[D]北京:清华大学,2014.
[8] 吴杰,蒋学争,姚进,等. 新型双层多线圈磁流变制动器研究[J].四川大学学报(工程科学版),2016(5):201-209.
[9] 赵春伟,彭向和. 基于有限元计算的磁流变液特性分析及其与基于磁偶极子模型结果的比较[J]. 功能材料,2012,43(15):2098-2101.
[10] 华文林. 磁流变液制动器的设计与研究[D]. 武汉:武汉理工大学,2002.
[11] 刘成. 磁流变液制动器的分析与设计[D].重庆:重庆理工大学,2010.
[12] 张秋香,任衍坤,王利锋,等. 圆盘式磁流变液传动装置设计与仿真[J]. 机械传动,2016(7):76-78,151.
[13] Carlson J D,Jolly M R. MR fluid,foam and elastomer devices. Mechatronics,2000,10(4/5): 555-569.
[14] 冯涛. 有限长螺线管场分布特性分析[D]. 西安:西安电子科技大学,2013.
[15] 王先锋. 惯性制动器试验台的控制系统设计及数据处理与分析[D].长沙:湖南大学,2006.
Development of experimental device for measuring braking characteristics of magnetorheological fluid
Li Jinning, Chen Wenjuan
(College of Science,China University of Petroleum,Qingdao 266580,China)
In order to study the braking characteristics of magnetorheological fluid,a measuring device is designed,which can control the braking process by changing the viscosity of the magnetorheological fluid through controlling the magnitude of the external magnetic field. SCM is used to collect the parameters about the speed,the braking time and the exciting current in the coil,and the collected data is processed and the braking characteristic curve under different conditions is drawn by the VB host computer. Through the theoretical analysis and experimental measurement of the braking parameters,the braking characteristics of the magnetorheological fluid are explored.
magnetorheological fluid; braking characteristics; VB host computer
10.16791/j.cnki.sjg.2017.07.020
2017-01-11
2017-03-06
山东省自然科学基金项目(ZR2015AM023);中央高校基本科研业务专项资金资助(15X02077A);中国石油大学(华东)国家级大学生创新创业训练项目 (201610425059);中国石油大学(华东)校级重大教学研究与实践项目(JY-A202618)
李津宁(1996—),男,内蒙古赤峰,本科生,主要从事磁流变液制动特性的研究
陈文娟(1969—),女,山东昌邑.硕士,高级实验师,主要从事仪器管理与制作研究工作.
E-mail:Lijinningupc@163.com
TB34
A
1002-4956(2017)07-0072-04
猜你喜欢
机电信息(2022年9期)2022-05-07
江苏安全生产(2021年9期)2021-11-27
河北电力技术(2021年2期)2021-07-29
模具制造(2019年7期)2019-09-25
中国特种设备安全(2019年3期)2019-04-22
电子制作(2018年1期)2018-04-04
大电机技术(2017年3期)2017-06-05
中国自行车(2017年11期)2017-04-04
柴油机设计与制造(2015年3期)2015-12-05
汽车科技(2015年1期)2015-02-28