阵元随机均匀分布球面阵列联合噪声源定位方法∗
2017-07-31 01:37张揽月1丁丹丹1杨德森1时胜国1朱中锐1
物理学报 2017年1期
张揽月1)2) 丁丹丹1)2) 杨德森1)2) 时胜国1)2) 朱中锐1)2)†
1)(哈尔滨工程大学,水声技术重点实验室,哈尔滨 150001)2)(哈尔滨工程大学水声工程学院,哈尔滨 150001)(2016年7月1日收到;2016年10月4日收到修改稿)
阵元随机均匀分布球面阵列联合噪声源定位方法∗
张揽月1)2) 丁丹丹1)2) 杨德森1)2) 时胜国1)2) 朱中锐1)2)†
1)(哈尔滨工程大学,水声技术重点实验室,哈尔滨 150001)2)(哈尔滨工程大学水声工程学院,哈尔滨 150001)(2016年7月1日收到;2016年10月4日收到修改稿)
基于球面传声器阵列的噪声源定位方法,设计加工了阵元随机均匀分布64元球面传声器阵列,研究了球面近场声全息和球谐函数模态展开聚焦波束形成联合噪声源定位识别方法,对算法的性能进行了仿真分析,并利用球面传声器阵列进行了噪声源的定位识别试验.研究表明,阵元随机均匀分布球面阵列具有全空间稳定的目标定位性能,球面近场声全息对低频近距离声源具有较高的定位精度,球谐函数模态展开聚焦波束形成对高频远距离声源具有较高的定位精度,将两种方法联合进行声源的定位识别,可以在较小孔径的球面阵列和较少阵元的条件下,在宽频带范围内获得对目标声源良好的定位性能.
近场声全息,聚焦波束形成,模态分解,噪声源定位识别
1引 言
噪声控制的前提是对噪声源准确定位识别,球面阵列特殊的结构使其具有很大的灵活性,能够对三维空间各方向噪声源进行定位识别[1].常规的噪声源定位方法主要包括近场声全息和近场聚焦波束形成技术.
近场声全息(near- fi eld acoustic holography,NAH)是20世纪80年代初发展起来的一种噪声源识别及声场可视化的声学技术.1985年,Wiliams等[2]提出基于空间Fourier变换的平面NAH理论.1996年,Lee等[3]将NAH推广到球面坐标系,提出了球面NAH.球面NAH可以通过布置于球面阵列的传声器所测得的声压数据,重构出球面外部的声场分布,从而实现声源定位[4].球面NAH中不需要波数域采样,避免了卷绕误差,并且由于球面NAH中测量面是封闭的闭曲面,不存在全息孔径截断的问题[5].2011年,Finn和Guillermo[6]推导了刚性球阵列的球面NAH算法,该算法考虑了刚性球的散射带来的影响.在国内,2014年,宋玉来等[7]利用单层球形传声器阵列对信号空间重采样实现声波分离.2015年,李敏宗等[8]利用刚性面球形传声器阵列结合NAH方法重构车辆的内部声场.基于声全息的噪声源识别方法在低频段有较好的空间分辨能力,但该方法用于高频段声源识别时,为了保证声场重建效果,需要减小空间采样间隔,大量增加传声器的个数,导致该方法难以应用于高频声源定位中[9].
球面阵波束形成技术通过对声信号进行聚焦得到声源的位置信息.2002年,Boaz等[10]提出了球谐函数远场波束形成方法,将传声器测得的声场信号进行球谐函数分解后聚焦输出识别声源的具体方位.2008年前后,Etan和Boaz[11,12]对球谐函数远场波束形成算法进行修正得到球谐函数近场波束形成算法.2013年,丹麦B&K公司的Hald等[13]在点源假设的声压球谐函数角度分解算法的基础上,提出了滤波求和算法.在国内,2006年,Lin和Xu[14]对球麦克风阵列在多声源情况下求解球谐系数进行了研究.2010年,汤永清等[15]利用球傅里叶变换将声场变换到频域推导声源定位的基本算法,且提出等距离分布传声器的方法.2014年,Chu等[16]利用球谐函数展开近场波束形成对房间内的声源进行定位试验.聚集波束形成测量阵列孔径不必大于被测的声源区域,可以用少量传声器组成阵列达到比较好的声源识别效果,但该方法在低频段的空间分辨能力较低,要提高低频段域的空间分辨力,需要增大测量阵列孔径和增加传声器个数,这在实际应用中并不可取[17].
本文提出了球面NAH与球面聚焦波束形成联合噪声源识别方法,在近距离低频段采用球面NAH对目标声源进行定位,在较远距离高频段采用球面聚焦波束形成对目标声源进行定位,利用两种方法各自的优越性来弥补彼此的不足,从而在宽频带内获得了较好的声源识别效果.
2随机球面阵列和数据模型
设计球面阵列时,可以采用角度均匀离散化方式布置阵元,这种方式在球体的两极阵元较密,在赤道轴上阵元稀疏,这导致对不同方向目标的定位精度不同.本文设计了阵元随机均匀分布球面阵列,在全空间不同方位保持相同的目标定位精度和多目标分辨能力.该球面阵列半径为a=0.3m,阵元个数Q=64,确定了球面阵的半径后,在球面上以随机均匀方式产生64个点作为阵元的布放位置,每次产生的64个点的位置是随机的,但64个点的相对位置是均匀的,这样设计的球面阵能够确保相邻点连接组成的小块面积基本相等,设计的球面阵列如图1所示.
如图2建立球坐标系,以随机球面阵中心为坐标原点(0,0,0),点声源位于(x0,y0,z0)位置处,声压表达式如下:


图1 随机均匀分布64元球面传声器阵Fig.1.Randomly distributed 64-element spherical microphone array.
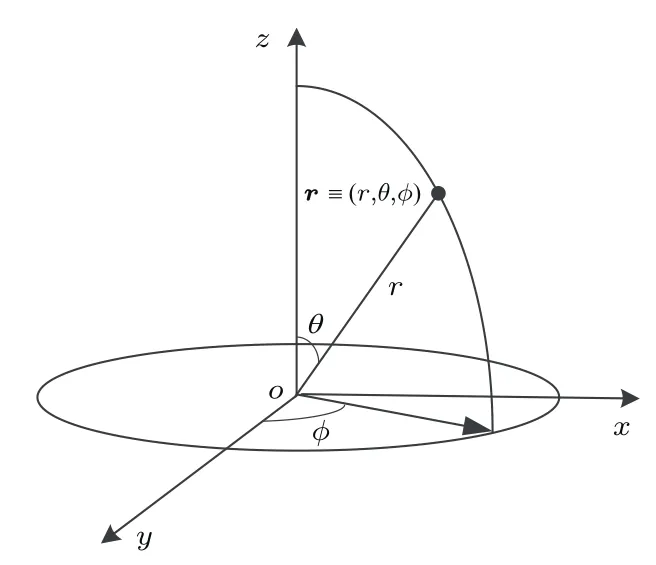
图2 球面坐标系Fig.2.Spherical coordinate frame.
球面阵阵元个数Q = 64,阵元编号为1,···,q,···Q,第q个传声器的空间坐标为(xq,yq,zq),则点声源在第q个传声器上的响应为


假设空间有K个点源目标入射到球面阵列上,则每个传声器接收的数据为K个点源目标的叠加.对球面阵的Q个传声器数据分别和第1个传声器数据进行互谱分析,获取整个球面阵的频域复声压为

利用球面阵获取的复声压数据对声源进行定位识别,采用球面NAH和球面阵聚焦波束形成联合方法对目标进行定位识别.
3随机球面阵列NAH和球谐函数模态波束形成理论
3.1 随机球面阵列NAH基本算法
采用图2建立的球坐标系,球坐标系下的Helmholtz方程为

采用分离变量法求得方程的通解为

式中,Dnm为任意的复常数,jn(kr)为第一类球Bessel函数,(θ,ϕ)为n阶m次的球谐函数.
将球面阵数据进行球面广义空间Fourier变换获得声压球面波谱

式中,S是半径为r的球面的封闭曲面,上标∗表示复共轭.
实际测量中,利用球面上的传声器对声场进行有限采样,只能获取传声器位置的声场,因此将对整个球面的积分转换为对各传声器场点的数值求和,则球面声压球面波谱Pnm的计算为

式中(rq,θq,ϕq)为第q个传声器对应的位置坐标;pq(rq,θq,ϕq)为第q个麦克风采样点处的声压,Q为传声器总数;αq=4πa2/Q为采样点计权系数,是相应传声器位置对应的球面网格面积;N为需要计算的球面波谱的最高阶数.N选择合适与否对计算结果的影响很大,N选取太小,不能完全得到三维空间的声压分布信息,不能正确重构声场;N选取也不宜过大,因为高阶的球面波谱对重建面的声压贡献很小,却易被噪声影响,并且使得计算量增大.本文基于遍历法的思想对N的选取做了大量仿真分析.结果表明N=10足以在声全息频率范围内得到三维空间声场的有效信息,所以选取N=10作为声全息球谐函数展开的截止阶数.
球面声全息变换时,存在全息球面(半径为rH)和重构球面(rS,rH̸=rS),全息球面上的声压球面波谱为Pnm(rH),重建球面上的声压球面波谱Pnm(rS),两者传递关系为

利用(9)式求得重构球面的球面波谱Pnm(rS)后,进行球面空间Fourier逆变换
得到重建面的声压分布,将重建面选在声源所在面附近,利用重建面上的声压分布对目标声源进行定位识别.
3.2 球谐函数展开聚焦波束形成算法
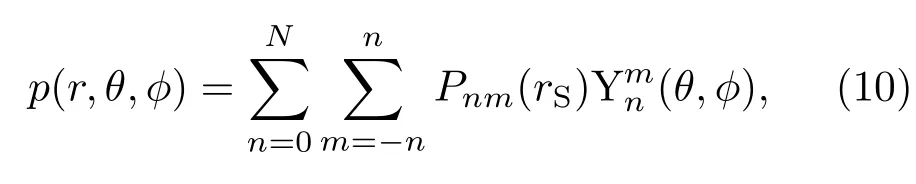
以球面阵列中心为坐标原点,假设一点声源位于球坐标系下(r0,θ0,ϕ0)处,该点声源在球面阵表面产生的声压为[18]
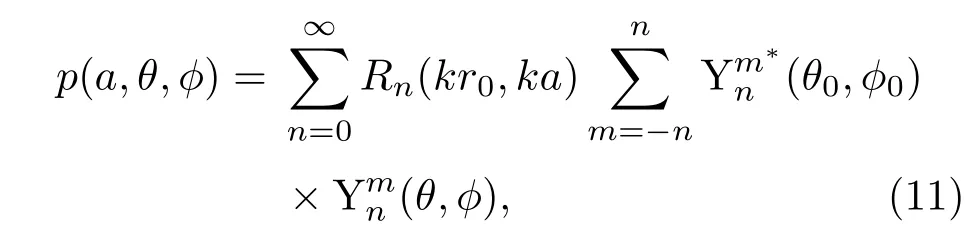
式中,a是球面阵半径,Rn(kr0,ka)为径向函数,其表达式为

式中,jn(ka)为n阶第一类球贝塞尔函数;h(1)n(kr)为n阶第一类球汉克尔函数.
对球面声压进行球谐函数分解有:

式中,Pnm为(8)式中的球面声压波谱.
对比(11)式和(13)式可得:

理想的阵列输出为函数在声波到达的方向输出最大,其他方向响应为零,可以表示为
由于球谐函数具有正交性,(15)式可以转化为

联立(14)式和(16)式可得球谐函数模态波束输出为
(17)式中对阶次进行无限次求和,实际测量中,只取前N次进行截断计算,得到阵列响应公式为

式中,n≤N,v≤N.其次N的选取和球面阵元个数有关,令Nmax为最大的取值数,通常(Nmax+1)2对应的值不大于阵列传声器的数量.若给定声源频率f满足ka=Nmax时,阵列传声器之间的平均距离略小于声波的半波长.实际经验表明,按照以下方式确定N的取值,能够平衡阵列的分辨率与旁瓣抑制的关系[18]:
式中[]表示将数值就近取整.
3.3 NAH和聚焦波束形成的频段划分
研究近场聚焦波束形成和NAH噪声源定位识别方法适用的频带范围,首先对两者的空间分辨力进行讨论,分辨率是阵列所能分辨的声源之间的最小距离.当声源在正对阵列的方向时,聚焦波束形成方法的空间分辨率为[19]

其中,L为测量距离,D为传声器阵列的有效孔径,λ为声波波长.可以看出,在L和D一定的情况下,分辨率随着波长的增加而降低.
基于声全息的噪声源识别方法的空间分辨率为[20]
式中,SNR为信噪比,d为测量距离.可以看出,在低频段,声全息的空间分辨率近似为

在高频段,声全息的空间分辨率近似为

在低频段,NAH方法的分辨率优于聚焦波束形成方法;在高频段,声全息需要大量增加传声器数目且要求阵元间距小于半波长来达到较高的分辨率,而聚焦波束形成只需少量传声器就可达到较高分辨率.因此,声源定位识别时,低频段采用NAH方法,高频段采用聚焦波束形成方法.
以NAH重建频率的上限作为两者的频域分界点,若全息面测量间隔为Δ,根据Nyquist采样定理,测量系统理论上所能准确记录的最高波数成分为kmax=π/Δ,实际中由于噪声的干扰,kmax<π/Δ,所以NAH重建频率的上限为

对于文中设计的球面阵列,64个传声器按阵元随机均匀分布方式组成球面阵列,球面半径为0.30m,阵元平均间距Δ为0.1329m,空气中声速为c=340m/s,得fmax<1280 Hz,因此取NAH和波束形成的分界频率f0=1000 Hz.理论计算并经过大量试验验证,得出以下结论:当重构频率在100—1000 Hz之间,声源距离球面阵球心0.3—0.45m之间时,声全息方法的声源定位精度较高;当频率范围在1000—5000 Hz之间,声源距离球面阵球心0.5—3m之间时,聚焦波束形成方法具有良好的声源定位效果.
4随机球面阵列NAH和聚焦波束形成噪声源定位仿真分析
4.1 球面阵不同空间方位声源定位性能仿真分析
仿真分析球面阵列对不同空间方位声源的定位能力.在距离球心为r0=0.35m分别放置三个声源,其坐标(r0,θ0,ϕ0)分别为(0.35,22°,167°),(0.35,81°,−168°),(0.35,104.5°,−129°).声源的频率为f=500 Hz,仿真中加入信噪比SNR=35dB的高斯白噪声,重构球面半径为rS=0.34m.结果如图3所示,左图是球面立体图,右图是相应的展开图.可以看出,该球面阵对于三个不同方位的声源都能有效定位.
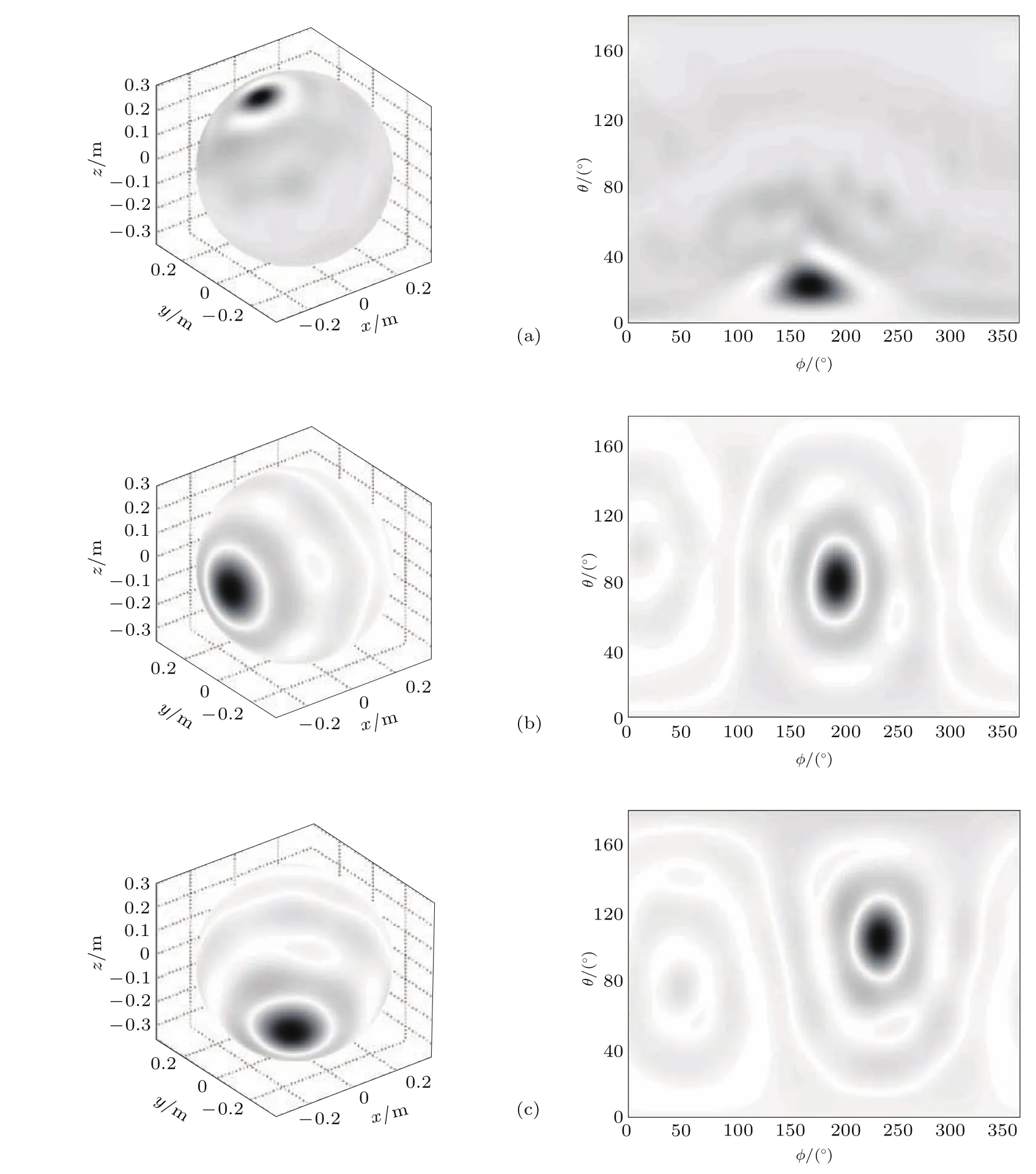
图3 f=300 Hz三个不同位置定位结果的三维立体网格和灰度图 (a)(r0,θ0,ϕ0)=(0.35,22◦,167◦);(b)(r0,θ0,ϕ0)=(0.35,81◦,−168◦);(c)(r0,θ0,ϕ0)=(0.35,104.5◦,−129◦)Fig.3.3D-mesh and gray-scale map of the location result for the three di ff erent points(a)(r0,θ0,ϕ0)=(0.35,22◦,167◦);(b)(r0,θ0,ϕ0)=(0.35,81◦,−168◦);(c)(r0,θ0,ϕ0)=(0.35,104.5◦,−129◦).
4.2NAH噪声源定位仿真分析
仿真分析球面阵列NAH方法声源定位性能,考察球面阵列对两声源的分辨能力.两声源正对25号和27号阵元布放,距离球心都为r0=0.35m,两声源的坐标(r0,θ0,ϕ0)分别为(0.35,90°,160°)和(0.35,94°,104°), 两声源的频率为f=300 Hz,仿真中加入信噪比SNR=35dB的高斯白噪声.利用声全息对两声源分辨,重构球面半径为rS=0.34m.结果在图4(a)给出,左图是两声源分辨结果的立体网格图,右图是相应的灰度图.可以看出,NAH方法能够清晰分辨出两个目标,两个目标相距0.3m,定位结果和理论结果一致.保持其他条件不变,只将两声源频率变为f=1000 Hz,利用NAH方法对两声源分辨,结果在图4(b)中给出,可见对1000 Hz的两个声源也进行了很好的分辨.将两声源的频率增高到2000 Hz,并将声源的位置调整为距球面阵中心1m的距离,仍然采用声全息方法对两声源进行分辨,重建面半径为rS=0.95m,结果见图4(c),声全息方法无法分辨高频远距离声源.由以上仿真可知,对低频近距离,球面NAH能够很好地定位和分辨声源.

图4 重建面声压幅值三维立体网格和灰度图 (a)f=300 Hz, r0=0.35m;(b)f=1000 Hz, r0=0.35m;(c)f=2000 Hz, r0=1mFig.4.3D-mesh and gray-scale map of the reconstruction surface pressure magnitude:(a)f=300 Hz, r0=0.35m;(b)f=1000 Hz, r0=0.35m;(c)f=2000 Hz, r0=1m.
4.3 球谐函数展开聚焦波束形成声源定位仿真分析
考察球面阵列波束形成对声源的定位与分辨能力.两声源分别正对25号和27号阵元布放,距离球面阵中心r0=1m,两声源坐标(r0,θ0,ϕ0)分别为(1,90°,160°) 和(1,94°,104°),两个声源辐射相同频率的单频声波,仿真中均加入信噪比SNR=35dB的高斯白噪声,令辐射的声波频率依次为f=500,1000,2000 Hz,球谐函数模态分解波束形成对两声源的定位与分辨结果见图5(a)—(c).
从图5(a)可以看出,当声源频率较低时,球谐函数模态展开聚焦波束形成的空间分辨率较差,无法分辨两个声源;从图5(b)和图5(c)可以看出,随着声源频率升高,波束图主瓣宽度变窄,能够分辨出两个目标.可以看出对于远距离高频声源,聚焦波束形成有着较好的目标定位和分辨能力.

图5 波束输出三维立体网格和灰度图 (a)f=500 Hz, r0=1m;(b)f=1000 Hz, r0=1m;(c)f=2000 Hz, r0=1mFig.5.3D-mesh and gray-scale map of the beamforming output:(a)f=500 Hz, r0=1m;(b)f=1000 Hz, r0=1m;(c)f=2000 Hz, r0=1m.
5随机球面阵列噪声源定位识别试验研究
对球面阵列的噪声源定位识别性能进行试验研究.试验系统包括发射系统和接收系统,发射系统由信号源、功放和空气声源组成.信号源产生信号,经功放推动后的驱动空气声源辐射声波.接收系统由球面阵列、滤波放大器、多通道信号采集器和控制计算机组成,利用球面传声器阵列拾取声场信息,经滤波放大后送给数据采集器进行数据采集存储.试验包括单声源定位和双声源分辨两个试验工况.在空旷环境下分别对单声源、双声源进行测试,采用声全息方法和球谐函数模态波束形成联合方法对声源进行定位与分辨,图6为试验现场照片.
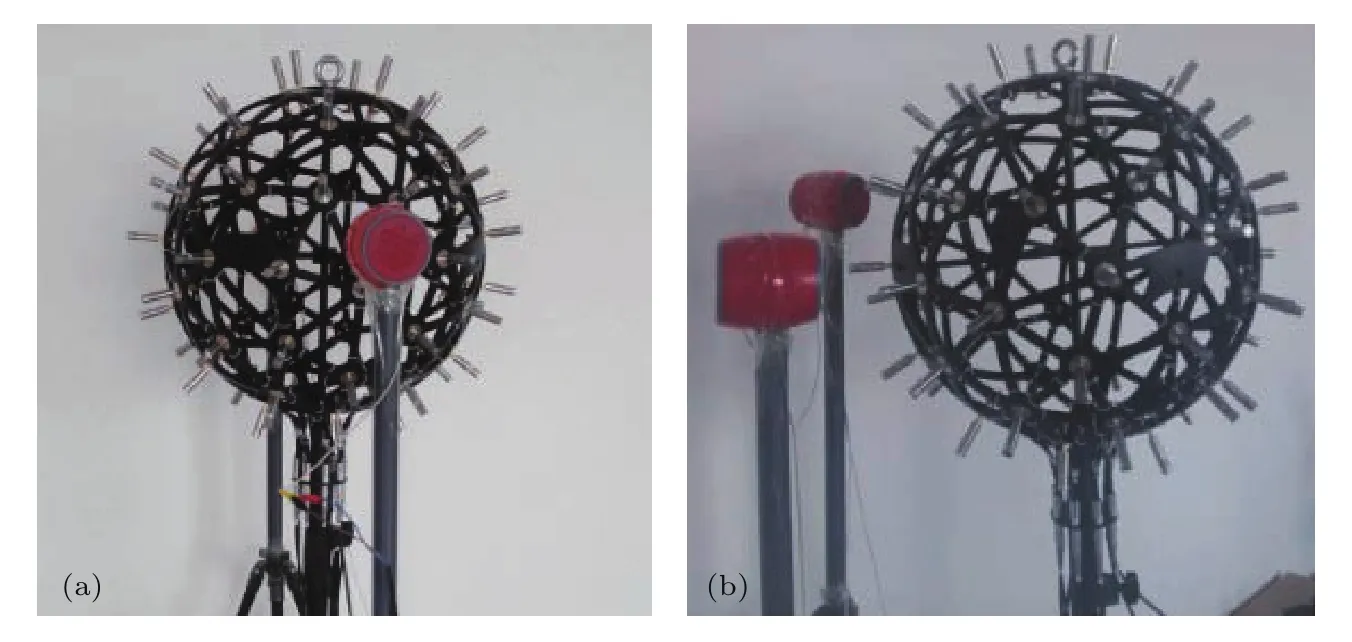
图6 试验现场照片 (a)球面阵单声源定位试验;(b)球面阵双声源分辨试验Fig.6.Experimental scene photos:(a)One sound source localization test using spherical array;(b)two sound sources distinguish test using spherical array.
5.1 单声源定位试验
声源距离球面阵中心0.35m正对25号阵元布放, 声源坐标(r0,θ0,ϕ0)为(0.35,90°,160°), 采用NAH分别对频率为300 Hz和1000 Hz的声源进行定位,结果如图7(a)和图7(b)所示.
由图7可知,在较低频率范围内,当声源距离阵列较近时,声全息算法可以对单声源进行高精度定位.
改变声源的频率依次为1000 Hz和2000 Hz,以球形传声器阵中心为坐标原点,声源距离坐标原点为1m,正对44号传声器,其坐标(r0,θ0,ϕ0)为(1,100°,0°),采用球谐函数展开聚焦波束形成算法进行声源定位的结果如图8所示.
由图8(a)和图8(b)可以看出,在高频范围内,当声源距离球面阵列中心较远时,球谐函数展开聚焦波束形成算法能有效定位出声源位置,但频率较低时,定位效果不佳,随着频率增高,定位效果明显变好.
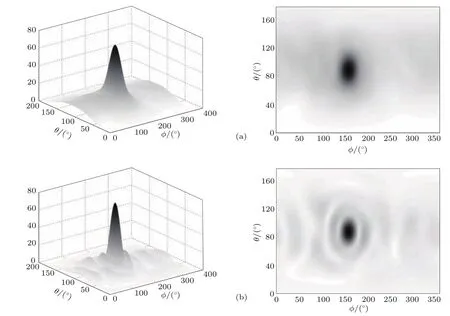
图7 正对传声器25,单声源定位试验结果三维立体网格和灰度图 (a)f=300 Hz, r0=0.35m;(b)f=1000 Hz, r0=0.35mFig.7.3D-mesh and gray-scale map of experimental location results for a single source:(a)f=300 Hz, r0=0.35m;(b)f=1000 Hz, r0=0.35m.

图8 正对传声器44,单声源定位试验结果三维立体网格和灰度图 (a)f=1000 Hz, r0=1m;(b)f=2000 Hz, r0=1mFig.8.Experimental results of 3D-mesh and gray-scale map for a single source identi fi cation:(a)f=1000 Hz, r0=1m;(b)f=2000 Hz, r0=1m.
5.2 双声源分辨试验
两个声源分别正对球面阵列的25和27号阵元布放,其位置在球坐标系下(r0,θ0,ϕ0)分别为(0.35,90°,160°)与(0.35,94°,104°),其他设置与单声源试验条件相同.令两个声源辐射声波频率依次为300 Hz,1000 Hz,1500 Hz的单频声波,频率为300,1000 Hz时采用球面声全息对双目标分辨,300 Hz时两个声源辐射的信号幅度大致相同,当1000和1500 Hz时,两声源辐射的信号幅度有强弱差异.结果示于图9(a)和图9(b)中.频率为1500 Hz时采用模态展开波束形成方法进行双目标分辨,结果如图9(c)所示.
可以看出,当声源频率在f=1000 Hz以下,球面声全息算法能对两声源进行有效分辨和定位,但随着频率增大,球面声全息分辨能力变差,对于高于f=1000 Hz的声波,采用球谐函数展开波束形成方法能够对两声源进行有效定位,且能分辨出目标的强弱.
6结 论
本文采用聚焦波束形成与声全息联合方法进行噪声源识别,通过理论推导、仿真分析和试验研究,验证了联合定位方法的有效性和优越性.对于本文设计的阵元随机均匀分布球面阵列,以f=1000 Hz为频率分界点,频率低于临界点且声源距离球面阵较近时,采用球面NAH方法进行定位,当声波频率超过临界点且距离球面阵较远时,采用球面模态分解波束形成方法对声源进行定位识别.研究结果表明,当重构频率在100—1000 Hz之间,声源距离球面阵球心0.3—0.45m之间时,声全息方法的声源定位精度较高,当频率范围在1000—5000 Hz之间,声源距离球面阵球心0.5—3m之间时,聚焦波束形成方法具有良好的声源定位效果.两种方法联合声源定位可以以较少的传声器、较低的硬件设备成本的条件下在宽频带范围内获得良好的声源定位识别效果.

图9 两声源分辨试验结果三维立体网格和灰度图 (a)f=300 Hz, r0=0.35m;(b)f=1000 Hz, r0=0.35m;(c)f=1500 Hz, r0=0.35mFig.9.Experimental results of 3D-mesh and gray-scale map for two sources distinguish:(a)f=300 Hz, r0=0.35m;(b)f=1000 Hz, r0=0.35m;(c)f=1500 Hz, r0=0.35m.
[1]Jens M,Gary E 2002 IEEE International Conference on Acoustics Orlando,FL,United States,May,2002p1781
[2]Maynard J D,Williams E G,Lee Y 1985 J.Acoust.Soc.Am.78 1395
[3]Lee J C 1996 Appl.Acoust.48 85
[4]Li M Z,Lu H C,Jin J M 2015 Acta Acust.40 695(in Chinese)[李敏宗,卢奂采,金江明 2015声学学报 40 695]
[5]Yu F,Chen J,Chen X Z 2003 J.Vib.Eng.16 85(in Chinese)[于飞,陈剑,陈心昭 2003振动工程学报 16 85]
[6]Finn J,Guillermo M P 2011 J.Acoust.Soc.Am.129 3461
[7]Song Y L,Lu H C,Jin J M 2014 Acta Phys.Sin.63 194305(in Chinese)[宋玉来,卢奂采,金江明2014物理学报63 194305]
[8]Ling M Z,Lu H C,Jin J M 2015 J.Vib.Eng.Chin.J.Sens.Actuat.28 1459(in Chinese)[李敏宗,卢奂采,金江明2015传感技术学报 28 1459]
[9]Du L 2011 M.S.Dissertation(Zhenjiang:Zhejiang Sci-Tech University)(in Chinese)[杜亮 2011硕士学位论文(浙江:浙江理工大学)]
[10]Boaz R 2004 J.Acoust.Soc.Am.116 2149
[11]Etan F,Boaz R 2008 Proceedings of IEEE Convention of Acoustics Las Vegas,March 31–April 4,2008p5272
[12]Etan F,Boaz R 2009 IEEE Workshop on Applications of Signal Processing to Audio and Acoustics New Paltz,NY,October 2009p169
[13]Hald J 2013 SAE Int.J.Passeng.Cars-Mech.Syst.6 1334
[14]Lin Z B,Xu B L 2006 J.Nanjing Univ.(Nat.Sci.)42 384
[15]Tang Y Q,Huang Q H,Fang Y 2010 Signal Process.26 655(in Chinese)[汤永清,黄青华,方勇 2010信号处理26 654]
[16]Chu Z G,Zhou Y N,Wang G J,He Y S 2012 Trans.Chin.Soc.Agric.Eng.28 146(in Chinese)[褚志刚, 周亚男,王光建,贺岩松2012农业工程学报28 146]
[17]Tang C 2013 M.S.Dissertation(Hefei:Hefei University of Technology)(in Chinese)[汤辰2013硕士学位论文(合肥:合肥工业大学)]
[18]ZhouY N 2014M.S.Dissertation (Chongqing:Chongqing University)(in Chinese)[周亚男 2014硕士学位论文(重庆:重庆大学)]
[19]Zhou X H 2008 Ph.D.Dissertation(Jilin:Jilin University)(in Chinese)[周晓华2008博士学位论文(吉林:吉林大学)]
[20]Xin Y,Zhang Y B,Bi C X 2010 Acta Metrolog.Sin.31 537(in Chinese)[辛雨,张永斌,毕传兴2010计量学报31 537]
PACS:43.20.+g,43.60.+dDOI:10.7498/aps.66.014303
*Project supported by the National Natural Science Foundation of China(Grant Nos.11674075,11404076).
†Corresponding author.E-mail:zhuzhongrui@hrbeu.edu.cn
Noise source identi fi cation by using near fi eld acoustic holograpy and focused beamforming based on spherical microphone array with random unifrom distribution of elements∗
Zhang Lan-Yue1)2)Ding Dan-Dan1)2)Yang De-Sen1)2)Shi Sheng-Guo1)2)Zhu Zhong-Rui1)2)†
1)(Science and Technology on Underwater Acoustic Laboratory,Harbin Engineering University,Harbin 150001,China)2)(College of Underwater Acoustic Engineering,Harbin Engineering University,Harbin 150001,China)(Received 1 July 2016;revised manuscript received 4 October 2016)
With the development of techlology,noise controlling has received wide attention in recent years.Noise source identi fi cation is the key step for noise controlling.Spherical microphone array,which can locate the noise source of arbitrary direction in three-dimensional space,has been widely used for noise source identi fi cation in recent years.Conventional methods of locating noise source include spherical near fi eld acoustic holography and spherical focused beamforming.The acoustic quantities are reconstructed by using spherical near fi eld acoustic holography method to realize the noise source identi fi cation,while the noise source can also be located by using focused beamforming based on spherical harmonic wave decomposition.However,both these methods have their own limitations when they are used in identifying the noise source.Spherical near fi eld acoustic holography has low resolution at high frequency with a far distance from noise source to measurement array for noise source identi fi cation,whereas the spherically focused beamforming has low localization resolution at low frequency.
Noise source identi fi cation is discussed here,and a 64-element microphone spherical array with randomly uniform distribution of elements is designed.The combination methods of noise source identi fi cation by using spherical near fi eld acoustic holography and mode decomposition focused beamforming are investigated.The performance of the proposed combination method is simulated,and an experiment on noise source identi fi cation is carried out based on the designed spherical microphone array to test the validity of proposed method.Research results show that the high-resolution noise source identi fi cation can be achieved by using near fi eld acoustic holography when reconstruction frequency is 100–1000 Hz with a distance 0.3–0.45m from noise source to the center of spherical array,while high resolution of noise source localization can be achieved by using spherical wave decomposition beamforming when signal frequency is 1000–5000 Hz with a distance 0.5–3m from noise source to the center of spherical array.Spherical array with random uniform distribution of elements maintains stable identi fi cation ability in all bearings.The spherical near fi eld acoustic holography has high-resolution distinguishing ability in near fi eld and at low frequency,while the focused beamforming method has high-resolution distinguishing ability in far fi eld and at high frequency.Therefore the noise source can be efficiently identi fi ed by using the proposed combination method of near fi eld holography and focused beamforming with less elements and small aperture spherical microphone array.
near fi eld holography,focused beamforming,mode decomposition,noise source identi fi cation
10.7498/aps.66.014303
∗国家自然科学基金(批准号:11674075,11404076)资助的课题.
†通信作者.E-mail:zhuzhongrui@hrbeu.edu.cn
猜你喜欢
电子世界(2022年1期)2022-07-23
哈尔滨轴承(2022年1期)2022-05-23
汽车工程(2021年12期)2021-03-08
石家庄铁路职业技术学院学报(2019年3期)2019-10-30
制造技术与机床(2019年8期)2019-09-03
制造技术与机床(2018年9期)2018-09-19
中国测试(2017年4期)2017-07-18
雷达与对抗(2015年3期)2015-12-09
振动工程学报(2014年4期)2014-03-01
演艺科技(2013年2期)2013-09-19