
一种基于六轴MEMS器件的低成本动态倾角传感器设计
2017-08-09 09:54王晓兰邹治弢
环境技术 2017年3期
王晓兰,邹治弢
(中国电子科技集团公司第四十九研究所,哈尔滨 150001)
一种基于六轴MEMS器件的低成本动态倾角传感器设计
王晓兰,邹治弢
(中国电子科技集团公司第四十九研究所,哈尔滨 150001)
倾角传感器是一种非常精确的测量小角度的检测工具,用它可测量被测平面相对于水平位置的倾斜度、两部件相互平行度和垂直度。动态工况下普通传感器无法直接应用,通过一种低成本的简易化方法,结合六轴MEMS技术和MCU的应用,实现了动态倾角传感器的工程化。
动态倾角;六轴MEMS;六轴融合
前言
角度计量是几何量计量的重要组成部分。倾角传感器又称作倾斜仪、测斜仪、水平仪、倾角计,经常用于系统的水平角度变化测量,从过去简单的水泡水平仪到现在的电子倾角传感器是自动化和电子测量技术发展的结果。
1 静态倾角与动态倾角
传统的静态倾角有限范围内的测量原理如图1所示,通过重力矢量和黄道交角的机理,仅当器件具有定方向,且X轴始终处于重心面时,其他轴向任何形式的旋转运动均会降低X轴投影量的大小,从而算出倾角,见图2。

进而

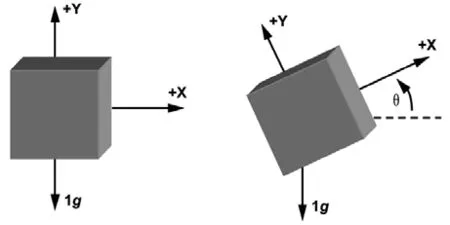
图1 静态倾角测量
在一些应用领域,例如车辆工程和大型装载设备,测量系在运动的情况下,加速度会随机的在X轴以及Y轴上投影,在这种情况下,普通的三轴MEMS加速度计或电解液测量的方法无法简单实现倾角的测量。
目前市场上普及的动态倾角类别的产品类别较少,要在不借助GPS和电子罗盘等的辅助下,精确地测量载体的动态横滚角和俯仰角,且精度指标不受时间限制,应当引入三轴陀螺仪进行融合计算实现(见图3)。
2 工程复位
理想情况下,加速度计水平放置时,XY轴应该是0输出的,仅Z轴输出1个G,因此,需要对加速度计进行XY轴的零点校准,再翻转一次进行Z轴校准;同样的,陀螺仪在水平静止放置时各轴输出应为0,因此需对陀螺仪进行三轴的校准。方法就是把机体标准水平静止放置时采集它个一两百次数据求个平均作为校准值保存,工作状态下各轴输出的数据就是采集来的数据减去校准值[1]。
为降低工程化成本,选用多路I2C采集设备对六轴MEMS敏感元件在流水线中同一测试和记录零位,将数据按编号存储后,实际的产品在烧录的程序中直接输入初测数据即可完成调试工作,可以缩短生产周期和节约生产开支。
3 硬件设计(见图4)
微控制器选择意法半导体的STM32F103,器件为Cortex-M3内核 ,最高主频可达72 MHz,并且可以实现单周期乘法和硬件除法,芯片集成定时器、CAN、ADC、SPI、I2C、USB、UART等多种功能。在业内有着广泛的应用领域,并且价格低廉,大幅度缩短开发周期[2]。

图3 车辆悬架内的倾角传感器

图4 倾角传感器调制电路
若采用模拟输出的器件,6个轴的输出数量较占用硬件资源,因此选择I2C/SPI等数字输出的器件。此电路理论上支持一切I2C器件,对于SPI器件则需要额外增加两个接口,在此不做赘述。
整合三轴加速度计和三轴陀螺的六轴器件品牌有很多,各品牌竞相推出六轴MEMS组合传感器。该设计目前选用某公司的MPU6050六轴传感器作为敏感元件。该元件工作温度范围为-40~85 ℃,陀螺仪可测范围为(±250,±500,±1 000,±2 000)°/s(dps),加速度计可测范围为(±2,±4,±8,±16)g。当改用其他元件时只需要更改软件中的通信部分。
电路中MAX3485ESA为485通信协议输出电路,当输出协议有额外要求时改用其他芯片。
4 六轴融合
加计和陀螺仪都能计算出姿态,因加速度计对振动类的扰动敏感,但长期数据计算出的姿态可信,而陀螺仪虽然对振动这些不敏感,但长期使用陀螺仪会出现漂移,因此需要进行互补,短期数据采集自陀螺,长期数据采集自加速度计[3]。
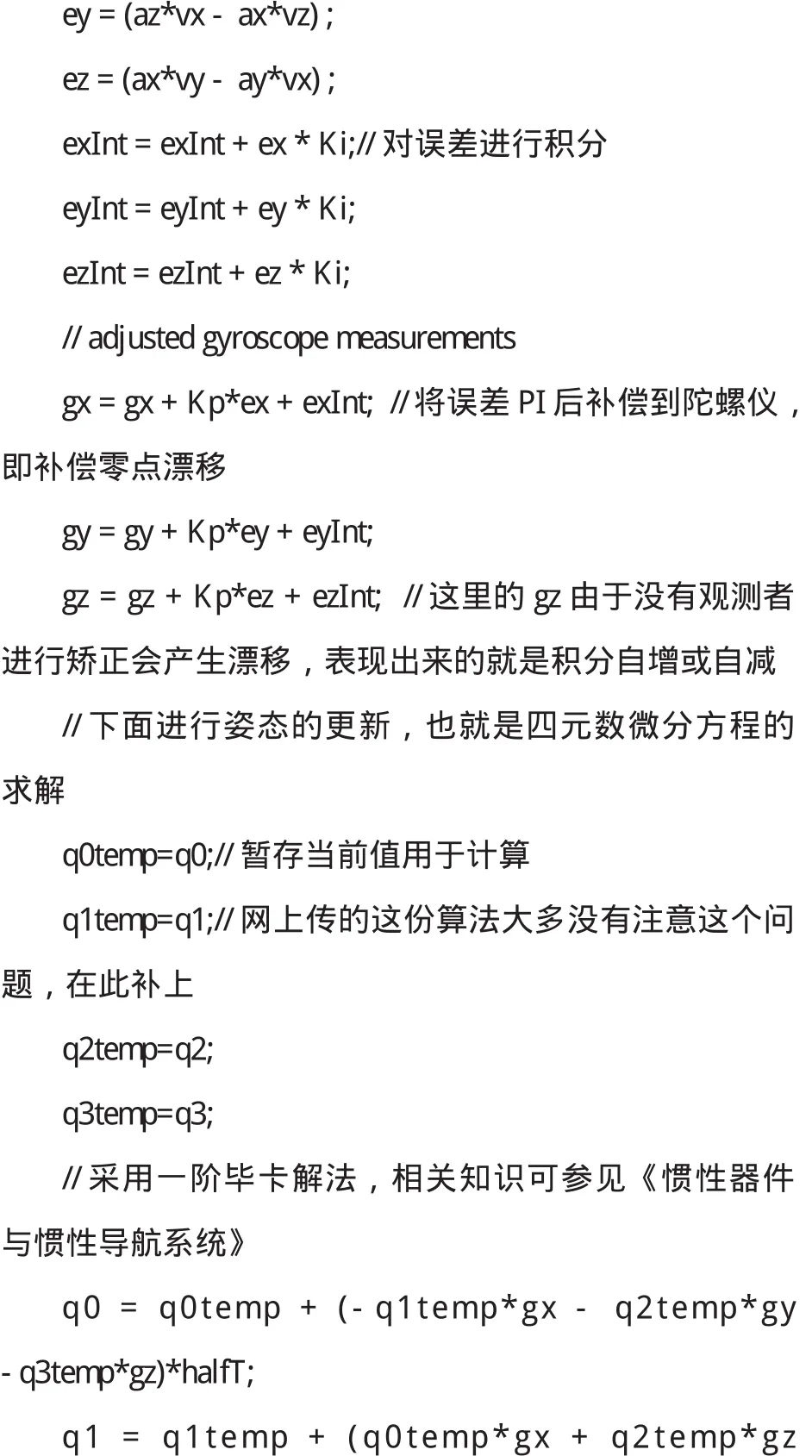
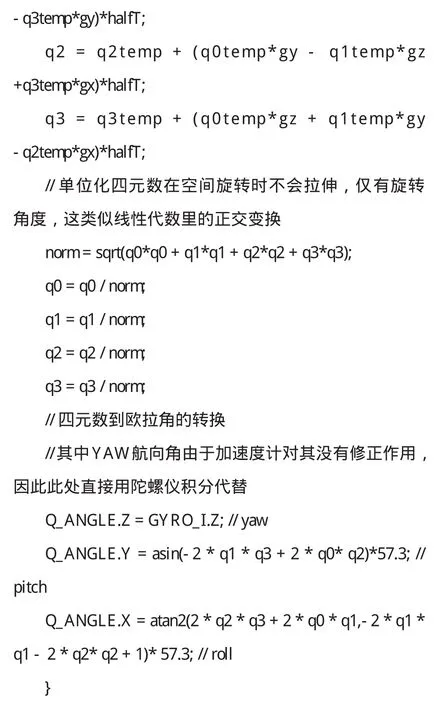
单只产品的程序在之前工程复位工作中已经将六轴的零位进行测量,因此实际上六轴的输出都减去初始零位获得真值,融合计算中各个部分均需用到真值。
#defineKp 10.0f// 这里的KpKi是用于调整加速度计修正陀螺仪的速度
#defineKi 0.008f
#definehalfT 0.001f// 样周期的一半,用于求解四元数微分方程时计算角增量
floatq0 = 1, q1 = 0, q2 = 0, q3 = 0; // 初始姿态四元数,由变换四元数公式得来
floatexInt = 0, eyInt = 0, ezInt = 0; //当前加计测得的重力加速度在三轴上的分量
//与用当前姿态计算得来的重力在三轴上的分量的误差的积分
voidIMUupdate(float gx, float gy, float gz, float ax, float ay, float az)//g表陀螺仪,a表加计

以上算法的简单框图见图5。

图5 简单框图

图6 中值滤波与无滤波输出的对比
5 均值滤波与中值滤波(见图6)
加速度计和陀螺仪的输出有波动,主要限制于选用的MEMS器件成本限值,因此软件上需要进行滤波处理。[4]实际使用中有均值滤波和中值滤波两种方式:均值滤波的做法是采样n+2个数据,剔除最大和最小的数据,将剩余数据加和在除以n以求平均值;中值滤波的做法是采样k(k为奇数)个数,冒泡法排列数组后,以第(k+1)/2个数据为中值。根据微控制器的工作机理来说,中值滤波的实现比较节省硬件资源,但中值滤波的结果比较平滑。主观上stm32f103的运算能力较强因此设计中选用中值滤波。需要注意的是这些滤波器的目的仅限于提高精度和平滑处理数据,而不是实现传统滤波器的模拟特征,例如幅频特性、相频特性、带外衰减等指标[5]。
int I2C_Filter(int pData[],u16 N) //N为载入滤波器数据数量,推荐8、16、32等,pData的格式需要为I2C总线的原始16位2进制数


6 成品试验
在离心机上安装对应坡角面,在不同转速下模拟不同时速和不同倾斜角速率下的测量精度,选取被测坡度的值分别为-30 °、-15 °、0 °、15 °、30 °、45 °、60 °。平动情况下模拟中国公路的典型时速,在匀速情况下测量其法向倾角[6];转动情况下的测量是通过在转台上定点至被测点时刻一瞬间(约10 ms)采样传感器输出瞬态值实现的,受现有总线技术制约和信号处理的时序限值,测试系统测量精度误差存在且不能忽略。

表1 倾角传感器实验室标定数据
倾角传感器实验室标定数据见表1。
7 结论
动态倾角传感器做为非接触式传感器中具代表性的类别,其技术水准依赖于MEMS技术和微控制器应用技术的不断完善和低成本化,因此其应用领域日益广泛。本文通过设计手段对上述技术的归纳和总结,在工程上大幅缩短了开发周期以及技术成本,通过实验证实本设计成品满足多领域的应用需求,具备一定的市场优势。
[1]崔建伟.基于嵌入式系统的数字滤波器、倾角传感器设计[D].北京:北京邮电大学, 2008.
[2]秦勇,藏希喆,等.基于MEMS惯性传感器的机器人姿态检测系统的研究.传感器技术学报, 2007, 20(2):298-301.
[3] The Balance Filter[EB/OL], web. mit. edu/first/segway. 2008-1-18.
[4]齐晓慧,田庆民,董海瑞.基于 Matlab系统辨识工具箱的系统建模[J].兵工自动化, 2006, 25(10):88-90.
[5] K. Karki, M. Torbjörnsson, J. R. Widom, A. H. Marcus, and T. Pullerits, JINST 8, T05005 (2013).
[6] G. W. Bradberry and J. M. Vaughan, Opt. Commun. 20, 307 (1977).
A Low-cost Dynamic Inclination Sensor Design Based on Six-axis MEMS Device
WANG Xiao-lan, ZOU Zhi-tao
(The 49th Research Institute, China Electronic Technology Group Corporation, Harbin 150001)
Inclination sensor is a very accurate detection tool for measuring micro angle. It can be used to measure the flit of the measured plane relative to the horizontal position, mutual parallelism and verticality between the two parts. The ordinary sensors can’t be applied directly under dynamic conditions. In this paper, a low-cost simplification method is applied by combining with six-axis MEMS technology and MCU applications. The engineering of dynamic inclination sensor is realized.
dynamic inclination; six-axis MEMS; six-axis fusion
TP212
A
1004-7204(2017)03-0063-06
王晓兰,女 ,(1969- )硕士,黑龙江哈尔滨 中国电子科技集团第四十九研究所 高级工程师,主要研究方向包括惯性导航类传感器研发、温度类传感器研发、压力类传感器研发、容式液位计研发等。
邹治弢,男 ,(1988- ) 学士,黑龙江哈尔滨 中国电子科技集团第四十九研究所 工程师,主要研究方向包括嵌入式系统的开发、自动控制、温度压力传感器设计制造等。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
科学大众(2021年19期)2021-10-14
北京汽车(2021年3期)2021-07-17
科学大众·小诺贝尔(2021年10期)2021-01-22
中国惯性技术学报(2019年1期)2019-05-21
百科探秘·航空航天(2017年9期)2017-12-31
中国惯性技术学报(2017年1期)2017-06-09
山东工业技术(2016年15期)2016-12-01
系统工程与电子技术(2016年7期)2016-08-21
探测与控制学报(2015年4期)2015-12-15
