基于航拍高分辨率图像的道路检测方法
2017-08-09 23:53黄绪勇高振宇赵李强王艳涛
中国科技纵横 2017年13期
黄绪勇++高振宇++赵李强++王艳涛


摘 要:随着计算机技术和摄影技术的飞速发展,我们可以实时自动的获取到大量的图像数据;如何从这些数据中获取到对工业生产有价值的信息是我们亟待解决的问题。在电力行业中直升机巡线已经实现,高压输电线与道路的交叉部分往往存在着许多安全隐患,在本文中我们提出了一种基于航拍高分辨率图像的道路检测方法。首先,我们对高分图像进行降采样建立图像金字塔,对低分辨率图像进行灰度化,直方图均衡化等操作;第二,我们计算梯度图像并对其进行阈值化处理和形态学开运算处理获取到类似于道路的疑似目标区域;第三,我们提取目标区域的形状指数颜色信息等组成特征空间再采用基于Bayes最小错误率的分类器对疑似目标进行识别;最后,我们采用基于色彩信息的区域生长算法对目标区域进行处理,这样可以连接相邻目标和抑制错误分类的目标。实验结果表明我们提出的算法在测试图像上集的识别率为95%。
关键词:飞机巡检;图像金字塔;特征空间;Bayes分类器;区域生长图像分割
中图分类号:TP391.41 文献标识码:A 文章编号:1671-2064(2017)13-0022-03
1 引言
随着计算机技术和摄影技术的飞速发展,航拍图像的分辨率相对于以往遥感图像有了极大的提高,使得航拍技术和计算机视觉计算应用于电力行业成为了可能。航拍巡线技术不仅可以实现电力设备的带电巡检有效的提高巡检工作的安全性,而且大大的提高巡线的效率达到实时提供巡检报告为管理人员提供对电力系统调度和维护的依据。道路自动识别是机器视觉和图像理解领域中的主要问题之一,如果我们能够找到理想的道路模型,那么我们就可以通过机器学习的方法替代人工识别的方法[1]。目前,在国际上英国、日本等国的不少研究机构进行了基于航拍图像的道路识别研究[2-3]他们采用遥感图像,无人机航拍图像,扫描的纸质地图图像等作为数据源;提取的过程可以归纳为自动和半自动提取。在国内,关于遥感图像道路提取的研究一直都非常的活跃,张中[4]等提出的基于色彩信息的道路自动提取算法是建立在模板匹配的基础上,在色彩信息比较丰富的情况下可以得到很好的识别效果;邰小雷[5]通过图像的梯度信息识别道路的区域和边界信息;董培[6]利用道路和背景在圖像纹理上的差异通过Graph Cut技术实现了对图像中道路区域的分割;Alvanz J M[7]提出基于道路区域的纹理与背景区域纹理不同的假设,通过设置道路区域的种子点,使用区域生长来逐步扩大道路的区域。Zhou heiling[8]等使用结构张量对Graph Cut图像分割算法进行了改进,得到了一个精度较高的道路分割算法但是该算法耗时较多。
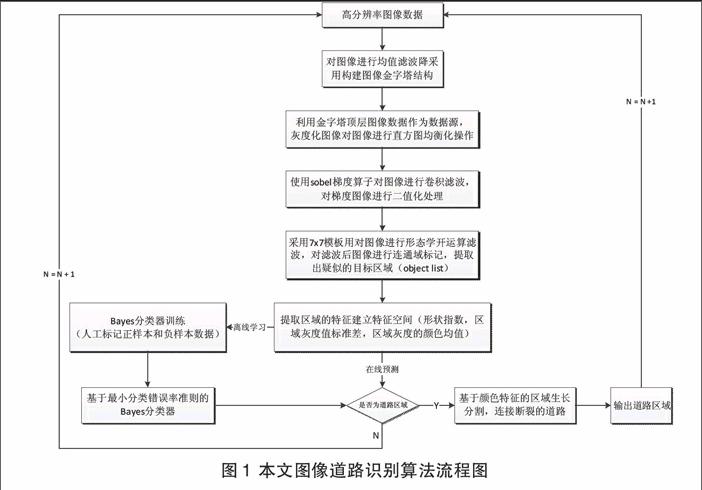
我们在本文中提出了一种基于监督学习的道路提取方法,算法流程如图1所示。本文的组织架构如下,第一部分我们简要的论述了图像数据道路识别的意义和国内外的发展现状;第二部分我们详细的介绍了我们所提出的图像道路识别算法的实现;第三部分我们给出了实验结果及分析;第四部分我们进行了简单的总结。
2 基于监督学习的道路检测算法
我们在分析了大量机巡航拍图像中的道路特征后,我们把这个问题归结为是监督型的机器学习问题。由于道路的概念是一个主观的概念,样本标记的行为就是把人们主观概率传递给机器的过程。所以我们应该人为的选择样本并将它们标记为正本和负样本,道路是一个区域级的概念故我们不选择基于像素级的特征,由于我们飞机巡线是在光照比较好的情况下进行故我们可以选择区域的色彩作为特征。Bayes分类器是被研究最为广泛的分类器之一,其统计学理论基础比较完善,而且容易实现,训练过程比较快,性能比较稳定,故在我们设计本文中的道路识别算法时我们选择了Bayes分类器。在道路提取的过程中我们对梯度图像进行了阈值化处理和形态的开运算,这样不可避免的引入了噪声导致目标区域的断裂,故我们在识别的后期使用区域生长算法对其进行补偿,这样可以有效的提高算法的性能。本文图像道路识别算法流程图1所示。
2.1 道路区域特征选择
道路区域特征空间图2所示,如何确定适合的特征空间是设计模式识别系统中一个十分关键的问题。如果选择的特征空间能使同类模式分布具有紧致性,即各类样本能分布在该特征空间中彼此分割的区域内,这就为分类器设计成功提供了良好的基础。如果,不同类别的样本在该特征空间中混叠在一起,再好的设计方法也无法提高分类器的准确性[9]。我们通过大量的实验尝试,最后选择了区域的形状指数(区域周长与面积比值),区域灰度值的标准差,区域灰度的平均值作为特征建立特征空间。在图2中我们选择了22个正样本o所示和31负样本x所示。从图2中我们可以看到在这个样本空间中有少部分的样本发生了混叠,这样我们选择最小错误率的Bayes分类器。
2.2 基于最小分类错误率的Bayes决策准则
如果我们已知有M类模式,以及这M类模式在n维空间中的统计分布,即已知各类模式的先验概率以及类条件概率密度函数。对于待测样品,Bayes公式可以计算出该样本分属各类模式的概率即后验概率;估计模式X属于哪个类别的可能性最大,我们就把模式X归于可能性最大的那个类,将后验概率作为判断待识别模式归属的判据。Bayes公式(1)所示:
(1)
在实际的工程问题中,统计数据往往呈现正太分布的特征。我们假设道路区域和非道路区域的特征都服从正态分布,这样模型训练的问题就变成了如何利用标记的样品对正太分布的参数进行估计的过程。我们采用多维随机变量的正态分布概率密度来模拟道路和非道路特征的概率密度函数(2)所示:
(2)
这样我们的道路识别问题转化为了二分类问题,(2)式中的代表道路特征类或非道路特征类,在我们的实验中i为0代表道路类,i为1代表非道路类。判别函数的对数形式定义为(3)所示:
(3)
2.3 基于区域生长的图像分割
目前主流图像分割技术有grow cut 和graph cut这两种算法的图像分割性能都比较好,但是都需要人工交互式处理选择一些前景区域和背景区域。在本文中我们不进行交互式处理,故我们选取了region cut作为图像分割的算法。区域生长(region cut)是根据事先定义的准则将像素聚集成更大区域的过程。它的思想是从一组生长点开始(在本文中我们采用bayes分类器识别出来的道路区域),将与该生长点性质相似的相邻像素与生长点进行合并,形成新的生长点,重复这个过程直到不能生长为止。我们采用的相似准则是像素点之间的颜色信息。
3 实现结果及分析
我们在Windows 7 64位上使用Qt和MSVC编译器实现了本文中所提出的算法。硬件环境为:Intel(R) Core(TM) i5-4200U CPU @ 1.6GHz 2.3GHz,4.00GB内存。在本文的实验中我们选择了22个正样本,31个负样本,样本数据如表1所示,在表中我们只给出了10个数据。
3.1 算法的实时性能测试
我们的测试图像分辨率为5000万像素(8688*5792),我们通过均值滤波器进行降采样建立图像塔形后取第四层图像分辨率为80万像素(1086*724),我们算法的处理时间为38ms这样的处理速度已经达到实时视频采样的帧率。所以我们在本文中提出的算法可以烧入嵌入式设备中作为机载设备实时给出分析结果。
3.2 算法的识别性能测试
我们随机抽取了53个样本图像组成测试样本库,对本文所提出的算法进行了分类性能测试,测试结果如图3所示,绿色矩形框给出的是真实道路目标,蓝色框给出的是非道路目标。
在测试图像集上,我们记录了80个目标的分类结果如表2所示,算法的正确识别率为:(TP+TN)/(P+N)=76/80=95%,识别错误率为:5%,灵敏度为:TP/P= 94.35%,特效度为:TN/N=95.56%,精度为:TP/(TP+FP)=94.29%。从以上的数据中我们看到在我们的测试库上面本文的算法可以达到95%的识别正确率。
4 结语
本文提出了一种基于Bayes最小错误准则的高分辨率道路检测的方法,通过人为标记的手段我们选择出图像中的道路区域和非道路区域;提取这些区域的三维特征向量(区域形状指数,区域灰度均值,区域灰度标准差)训练Bayes分类器;通过Bayes分类器对测试样本进行预测,对预测出的道路区域进行区域生长分割,进一步减少分类器的错误率。实验结果表明本文的算法可以在高分辨率图像中识别出道路区域,运行效率可以达到实时性的要求。对于实际的飞机巡检电力设备的缺陷故障具有很大的应用价值。
参考文献
[1]武冰,周石琳,粟毅.一种引入角点特征的遥感图像道路提取方法[J].计算机仿真,2006(10):209-213.
[2]Stoica Radu, Descombes Xavier, Zerubia Josiane. AGibbs point process for road extraction from remotely sensed images[J].Internatinal Journal of Computer Vision,2004.
[3]Hinz Stefan, Baurngartner Albert. Automatic extraction of urban road networks form multi-view aerial images[J].Photogrammetry and remote sensing,2003.
[4]張中,鲍远律,屈静.彩色公路地图的道路自动提取[J].计算机辅助设计与图形学学报,2006(01):21-26.
[5]邰晓雷.遥感图像道路信息提取研究[D].昆明理工大学,2012.
[6]董培,石繁槐.基于小型无人机航拍图像的道路检测方法[J].计算机工程,2015(12):36-39.
[7]Alvanz J M,atl… Shadow Resistant Road segmentation from a Mobile Monocular System[J].Pattern Recongition and Image Analysis,2007.
[8]Zhou Hailing, Kong Hui, Wei Lei, Efficient Road Detection and Tracking for Unnamed Aerial Vehicle[J].IEEE Transactions on Intelligent Transportation Systems,2015.
[9]杨淑莹.模式识别与智能计算---Matlab技术实现(第二版)[M].电子工业出版社,2011.