
未知环境下的变形移动机器人路径规划
2017-08-16 14:51熊开封杨晓帅
制造业自动化 2017年6期
庞 杰,熊开封,杨晓帅,陈 竹,赵 胡
(1.西南科技大学 信息工程学院,绵阳 621010;2.西南科技大学 工程技术中心,绵阳 621010;3.西南科技大学 制造科学与工程学院,绵阳 621010)
未知环境下的变形移动机器人路径规划
庞 杰1,熊开封2,杨晓帅3,陈 竹1,赵 胡3
(1.西南科技大学 信息工程学院,绵阳 621010;2.西南科技大学 工程技术中心,绵阳 621010;3.西南科技大学 制造科学与工程学院,绵阳 621010)
为提高移动机器人在未知环境下的避障能力及导航能力,提出了基于变形以及模糊算法的路径规划方法。变形移动机器人利用超声波传感器对静态未知环境进行检测,得到障碍物以及目标的位置信息,采取适当的变形措施以及在模糊控制的基础上调整自己的运动方向,最终实现避障和最优路径规划。仿真及实物实验结果表明,此方法能使变形机器人与环境实现交互调整,能使机器人通过变形以及避障结合的方式实现有效避障,提高了路径规划的优良性。
移动机器人;变形;路径规划;模糊控制
0 引言
在移动机器人研究中,自主式导航能极大地提高移动机器人在未知环境中的实时性与灵活性。如何使机器人在有障碍物的环境中去自动寻找一条恰当的从初始点到目标点的运动路径,使移动机器人在运动过程中能安全无碰撞地到达目的地,是机器人研究领域的一个核心内容[1]。本文在之前的研究基础上[2]提出了一种在可变形机器人平台上的基于模糊算法的路径规划方法。最后,通过实物验证了此方法的有效性。
1 模型建立
本文研究的移动机器人如图1所示,主控采用STM32F103ZET6系列芯片,布设12个HC-05型超声波传感器、8支10cm长的触碰开关作为测距传感器。
1.1 机器人运动控制及变形

图1 变形移动机器人模型
如图1所示,整体机器人为四边形结构,头部位置装有舵机,通过控制舵机改变头部两臂夹角,从而改变机器人前后、左右结构的伸缩形变,以此达到多种方式避障目的。相对文献[3~5]所采用的结构及变形方式,该机器人结构更加简单,变形方式更实用,能确保拥有较大工作底盘的机器人灵活通过特殊障碍区域。其中头部夹角改变范围为[0,π],其中,夹角为[0,π/4]设定为前后伸展模式;(π/4,3π/4)设定为正常模式;[3π/4,π]设定为左右伸展模式,示意如图2所示。控制器根据此模式设定不同的传感器分配方式。
此机器人运动底盘,不同于普通的轮式结构,采用四个90°的万向轮。分别命名为F、L、R、B。其中以F为前方向轮,F、L、R为驱动轮,形成三角形驱动结构,左右电机轴方向与机器人前后方向始终为/3。机器人采用正三角形万向轮驱动方式,与变形结构配合使用,能实现多方向直线运动、原地转向等多种运动操作。

图2 机器人变形
1.2 传感器系统
机器人简化模型的俯视图如图3所示,以模型的中心O为坐标原点建立平面直角坐标系,机器人运动方向为y轴正方向,四周坐标表示超声波的对应位置。
如图3所示为,12路超声波传感器均匀分布于机器人本体周围。为避免各传感器相互串扰及镜面反射造成的测量误差,控制器控制超声波传感器根据分组依次循环启动:
1)正常模式,分为前(1,2,3号传感器)、左(4,6,8号传感器)、右(5,7,9号传感器)、后(10,11,12号传感器)四组。
2)左右伸展,分为前(1,2,3,4,5号传感器)、左(6号传感器)、右(7号传感器)、后(8,9,10,11,12号传感器)四组。
3)前后伸展,分为前(1号传感器)、左(2,4,6,8,10号传感器)、右(3,5,7,9,11号传感器)、后(12号传感器)四组。
每组中取最小测量值作为该方向的障碍物距离。此传感器分配方法,经实验证明,在机器人变形情况下也能完全使用。

图3 超声波传感器布局
2 模糊控制器
2.1 输入与输出模糊表示
本文设定模糊控制器[6,7]的四个输入变量为前方、左方、右方的障碍物距离信息及目标物的方向信息,输出变量为机器人前进方向。其模糊控制系统如图4所示。

图4 模糊控制系统
前组超声波传感器测量前方障碍物,其中取机器人外表面离障碍物最小距离测量值为前方障碍物距离信息,命名为DF。同理,左、右方障碍物距离分别为DL、DR,设定机器人左方向为负方向,右方向为正方向。令机器人当前前进方向为,目标方向为,目标方向与机器人当前方向夹角为β,障碍物相对于当前进方向夹角为α,经过模糊控制后机器人前进方向为其方向改变量为θ,其机器人运动模型如图5所示。
机器人超声波传感器测量距离范围为[2cm,300cm],定义其模糊语言为DF={Near,Far},DL={Near,Far},DR={Near,Far};目标方向信息为E={LB,LM,LS,ZO,RS,RM,RB};输出变量θ={VLB,VLM,VLS,VZO,VRS,VRM,VRB}。各个变量的隶属度函数如图6所示。
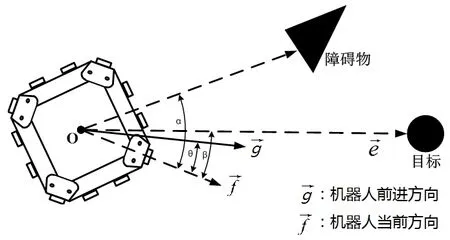
图5 机器人运动模型

图6 隶属函数模型
2.2 模糊控制
本文根据实际遇障及避障情况[8]来建立模糊控制规则,当障碍物较远时,机器人将按正常速度向目标方向前进,当障碍物与机器人最小距离达到安全阈值后,机器人将减速并采取变形以及模糊控制的方式来实现避障以及趋向目标。为合理建立模糊规则库,将机器人的遇障情况总结为8类,如图7所示。

图7 机器人遇障情况
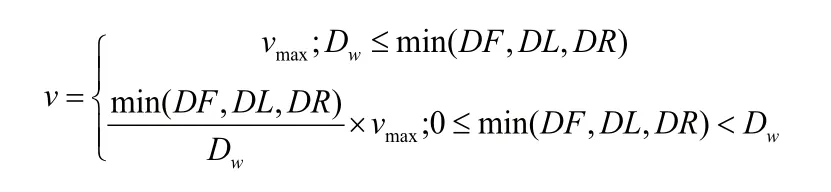
机器人根据未知环境下障碍物分布情况,以及目标物方向信息决策推理出前进方向,从而达到在避障的前提下往目标物方向前进的目的,并实现最优路径规划。本文中设定实验数据,左方向为负,右方向为正。机器人警戒距离为vw=30cm,安全阀值距离为vs=10cm,最大行驶速度为vmax=8cm/s。采用的决策规则[9,10]如下:
其速度控制模型为:
其运动方向控制基于模糊规则如下:
1)当DF>Ds时:
(1)当min(DL,DR)>DS,θ=β;
(2)当DL≤DS<DR,θ=π/12;
(3)当DL≤DS<DR,θ=π/12;
(4)当max(DL,DR)≤DS,θ=0。
2)当DF≤DS时:
(1)当min(DL,DR)>DS且β<0,θ=−π/6;
(2)当min(DL,DR)>DS且β≥0,θ=π/6;
(3)当DL≤DS<DR,θ=π6;
(4)当DR≤DS<DL,θ=−π/6;
(5)当max(DL,DR)≤DS且β<0,θ=-π/3;
(6)当max(DL,DR)≤DS且β≥0,θ=π/3。
使用输入输出变量模糊表示,采用模糊规则的“IF-THEN”语句来描述决策规则,建立了56条模糊规则,如表1所示。

表1 模糊规则
2.3 解模糊
本文采用面积重心法将模糊化的输出量清晰化,来得到精确的机器人前进方向。设定为隶属度函数,为横坐标,u为最终输出值,即:

面积重心法具有平滑的输出推理,即使对应于输入信号的微小变化,输出会发生改变。
3 算法仿真及实现
为验证本文方法的有效性,本实验基于MATLAB平台设计了单独的GUI界面对其进行仿真,预设起始点、目标位置,多边形黑色图块为障碍物,绿色圆圈为机器人行走轨迹,仿真效果如图8所示。
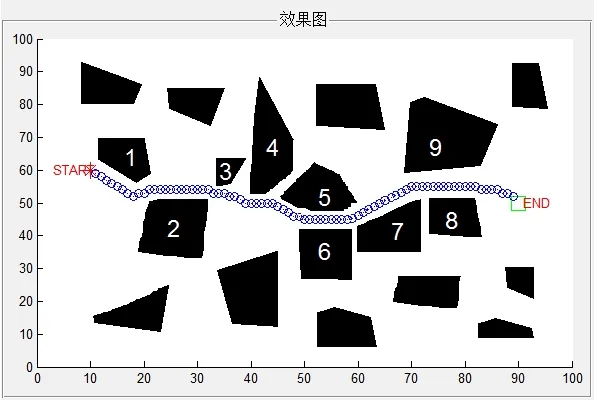
图8 路径规划仿真
由仿真结果可见:
1)在遇见1、3、4、5号障碍物时执行第29~30条模糊规则;
2)在5、6号障碍物间采取前后伸长的变形方式,并执行第37~38条模糊规则;
3)在遇见2、8号障碍物时执行第10条模糊规则;
4)在遇见7号障碍物时执行第8~9条模糊规则。
由图8可知,变形移动机器人从出发到到达目标位置过程中,实现了基本的避障以及高效率的的路径规划。验证了本文算法的有效性。
根据仿真情况,结合机器人变形的特性,搭建了与仿真相似的场景,实际验证如图9所示,表现出了实际情况下结合变形方式的避障有效性以及体现了路径规划的高效性。
4 结论
本文介绍了一种变形移动机器人在静态未知环境下进行检测,检测到障碍物以及目标的位置信息,在模糊控制的基础上调整自己的运动方向及速度,最终能实现避障和最优路径的一种方法。本文系统的描述了模糊规则控制器的设计,利用MATLAB进行了仿真实验,以及实物验证。实验结果表明这种方法可以使机器人与环境实现交互调整,并能通过包括变形方式在内的多种方式实现有效避障,提高路径规划的优良性。

图9 机器人避障
[1] 朱大奇,颜明重.移动机器人路径规划技术综述[J].控制与决策,2010(7):961-964.
[2] 熊开封,张华.基于改进型FNN的移动机器人未知环境路径规划[J].制造业自动化,2013(11):2-4.
[3] 赵腾,葛为民,等.新型自重构机器人构型表达及空间变形线策略研究[J].组合机床与自动化加工技术,2015(4):109-111.
[4] 刘志,赵正大,等.考虑结构变形的机器人运动学标定及补偿[J].机器人,2015(5):377-381.
[5] Qiang Zhan,Ze Ning Liu.A Deformable Spherical Mobile Robot[J].Applied Mechanics and Materials,2014:422-426.
[6] 张营,鲁守银.基于模糊控制算法的变电站巡检机器人路径规划[J].制造业自动化,2015(6):54-55.
[7] 梁顺健,汪俊彬,等.基于模糊算法的多移动机器人目标跟踪[J].自动化与仪表,2014(2):6-7.
[8] 彭玉清,李木,等.基于改进模糊算法的移动机器人避障[J].计算机应用,2015(8):2258.
[9] Ming Ming Bian,Jin Lan Zhang,Binzhou Polytechnic.Mobile Robot Path Tracking Based on Fuzzy Control[J].Applied Mechanics and Materials,2015:736-739.
[10] Mehdi Ghanavati,Afshin Ghanbarzadeh. Control and Guidance of an Underwater Robot via Fuzzy Control Method[J].Majlesi Journal of Mechanical Engineering,2010:25.
Deformable and mobile robot’s path planning in unknown environments
PANG Jie1, XIONG Kai-feng2, YANG Xiao-shuai3, CHEN Zhu1, ZHAO Hu3
TP24
:A
1009-0134(2017)06-0001-04
2017-02-22
西南科技大学大学生创新创业训练计划项目(教育部 201510619018)
庞杰(1995 -),男,四川西充人,本科,研究方向为电子信息工程。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
现代仪器与医疗(2021年1期)2021-06-09
成都信息工程大学学报(2021年6期)2021-02-12
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
中国惯性技术学报(2019年3期)2019-10-15
中国惯性技术学报(2019年3期)2019-10-15
电子制作(2019年16期)2019-09-27
电子制作(2016年21期)2016-05-17
