间断制导下的反辐射无人机被动定位算法研究
2017-09-08 13:47梁永生唐勇王濛
航空工程进展 2017年3期
梁永生,唐勇,王濛
(中国电子科技集团公司 西南电子设备研究所,成都 610036)
间断制导下的反辐射无人机被动定位算法研究
梁永生,唐勇,王濛
(中国电子科技集团公司 西南电子设备研究所,成都 610036)
目前,有关被动定位算法的研究多是在测量信息连续的情况下展开的,对于测量信息间断情况下的滤波鲜有涉及。针对该问题,以反辐射无人机为研究对象,提出一种基于卡尔曼滤波的间断制导下的被动定位算法,并通过仿真,验证了该方法的有效性。结果表明:提出的新方法能够用于间断制导下的被动定位,且具有一定的定位精度。
反辐射;被动定位;不等间隔;间断制导;卡尔曼滤波
0 引 言
目标的被动定位技术源于潜艇的隐蔽攻击。隐蔽攻击是指利用被动探测器量测到的目标信息来确定目标的运动参数(包括位置、速度、加速度等)。
随着探测器的不断发展,目标的被动定位技术也开始应用于其他探测系统,例如,反辐射无人机等反辐射武器。目前,反辐射无人机已达到抗雷达或通讯类目标间歇性关机的目的。
研究反辐射无人机或导弹的被动定位的算法很多,以基于卡尔曼滤波及其改进形式的方法为主。例如,张丽艳等[1]针对无源定位中状态空间模型非线性的程度较高所引起的滤波发散问题,分析总结了EKF递推滤波过程,并给出了仿真结果;朱学平等[2]利用UKF对非线性滤波性能的改善,提出一种基于扩展状态变量维数的UKF方法,可同时实现目标状态估计和导引头非线性特性补偿;王勃等[3]、王庆欣等[4]均采用自适应UKF滤波方法来解决观测方程带有系统偏差、观测噪声统计特性等问题;刘洋等[5]在UKF的基础上引入自适应渐消因子以提高滤波算法的稳定性。此外,还有大量文献基于各种卡尔曼滤波的发展形式和其他滤波理论开展目标定位研究,例如,杨军等[6-7]基于FDEKF(有限差分扩展卡尔曼滤波)理论开展目标定位研究;陈占海等[8]基于MVEKF理论进行目标定位研究;唐涛等[9]采用改进的粒子滤波理论进行目标定位研究;曹东波[10]采用了自适应变维EKF,增加了滤波的稳定性;许涛等[11]通过适当的观测方程重构,将EKF应用到导引头含有有色噪声的情况。
上述文献针对目标定位中遇到的各种问题开展研究,极大地丰富了目标定位理论与方法,对完善被动定位技术具有积极意义;但上述研究均是在被测量信息无间断的基础上进行的,而对测量信息间断情况下的滤波鲜有涉及。实际上,测量信息间断的情况是存在的,例如在定位过程中,目标间歇开/关机、通讯类目标的空间分布特性等,都有可能导致测量信息的间断。
针对测量信息间断的情况,本文基于EKF滤波定位方法,引入出现间断信息时的滤波递推策略,将传统的滤波定位方法从适用于连续测量信息的滤波定位,推广到同时适用于间断测量信息下的滤波定位,并通过算例来验证所提出的方法的有效性。
1 建立滤波模型
基于卡尔曼滤波方法开展被动定位研究,首先建立状态方程和观测方程。
1.1 状态方程
不考虑无人机-目标的相对速度,即选取状态变量为X=[rx,rz,ry]T时,状态方程为
X(k+1)=Φ(k+1|k)X(k)+Γ(k+1|k)u(k)
(1)
其中,
(2)
(3)
u(k)=[-Vrx,-Vrz,-Vry]T
(4)
式中:Φ(k+1|k)为状态转移阵(单位阵);Γ(k+1|k)为控制阵;u(k)为输入量,表示无人机-目标相对速度(目标不运动)。
1.2 观测方程
惯性坐标系中无人机-目标相对运动关系如图1所示。
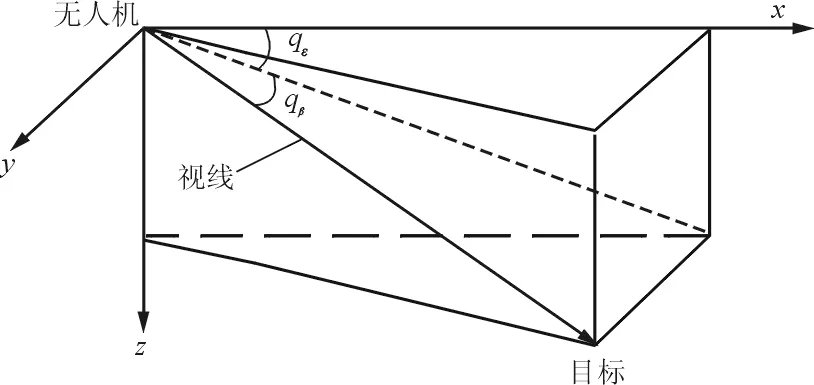
图1 无人机-目标相对运动关系示意图
根据无人机-目标相对运动关系,得到目标视线高低角qε和视线方位角qβ的计算公式:
(5)
当选取惯性坐标系下的无人机-目标视线角作为观测量时,只测角被动定位系统的观测方程为
(6)
令
求取h[X(k)]的线性化矩阵H:
(7)
其中,

H12=0





则观测方程可写为
Z(k)=H(k)X(k)+v(k)
(8)
测量噪声v1、v2为零均值、方差未知的噪声信号。
2 被动定位算法设计
基于扩展的卡尔曼滤波方法,完成间断制导情况下的被动定位算法设计。
2.1 推广卡尔曼滤波算法(EKF)
对于非线性系统

(9)
式中:X(k)为n×1维状态向量;Z(k)为m×1维观测向量;u(k)为l×1维控制向量;Γ(k)为n×1维矩阵;v(k)为m×1维独立的高斯白噪声。
统计特性为
(10)
推广卡尔曼滤波(EKF)算法可写为

(11)
P(k+1/k)=Φ(k)P(k/k)ΦT(k)
(12)

(13)
P(k+1/k+1)= [I-K(k+1)H(k+1)]·
P(k+1/k)
(14)
K(k+1)=P(k+1/k)HT(k+1)[H(k+1)·
P(k+1/k)HT(k+1)+R]-1
(15)
(16)
算法初值选取:
(17)
给定初值后,即可启动推广卡尔曼滤波算法,得到系统状态的最优估值。
2.2 间断制导下的被动定位算法设计
卡尔曼滤波器计算更新过程存在两个过程:时间更新和量测更新。当观测量不等间隔,即导引头测量信号出现间断时,可以在每一个时刻点T时,利用系统状态转移矩阵的特性,只进行卡尔曼滤波器的时间更新;而在量测输出时刻同时进行卡尔曼滤波器的时间更新和量测更新,从而可以解决非等间隔量测的滤波问题。
(1) 在测量信息缺失时,采用时间更新过程,即利用预测值代替滤波值输出:

(18)
(2) 在测量信息完整时,同时进行时间更新和量测更新。
2.3 滤波算法初值的选取方法
在上述滤波算法设计中,滤波开始的条件为导引头截获目标,即导引头测量出目标视线高低角qε和视线方位角qβ;在获得了无人机-目标相对角度信息后,以该时刻无人机在当地惯性系下的投影作为滤波坐标系的坐标原点,结合无人机的卫星导航系统、高度表等其他传感器测得的无人机高度信息,计算出粗略的无人机-目标相对位置信息,再利用该信息作为滤波算法状态变量的初始值X0,即
X0=[rx0,rz0,ry0]T
(19)
其中,
(20)
rz0=H0
(21)

(22)
式中:H0为卫星导航系统或高度表测得的当地惯性系下的无人机高度(假设目标处于地面)。
由初始状态估计误差方差阵P0的计算方法为
(23)
若假定无人机俯仰通道、方位通道测角噪声均方差以及高度测量误差分别为σε、σβ和σH,采用保守估计,测角误差Δqε=±3σε,Δqβ=±3σβ,高度测量误差ΔH=±3σH,则:
Δrz0=ΔH
(24)

(25)
(26)
上述公式在使用时需计算正负偏差组合时的各个偏差量,取较大值的数量级作为P0的初值:
(27)
式中:n1、n2、n3分别为各状态变量初值偏差数量级的平方。
3 仿真验证
对观测量不等间隔时的被动定位算法进行仿真验证,仿真条件为:目标初始位置(0,2 000 m,-3 000 m);无人机初始位置(14 000 m,0,0);无人机匀速直线飞行,飞行航迹如图2所示。

图2 无人机飞行航迹
飞行期间,分别在3~23 s、45~66 s制导信息缺失,根据本文提出的间断制导下的被动定位算法,基于上述条件进行仿真,仿真结果如图3~图5所示。
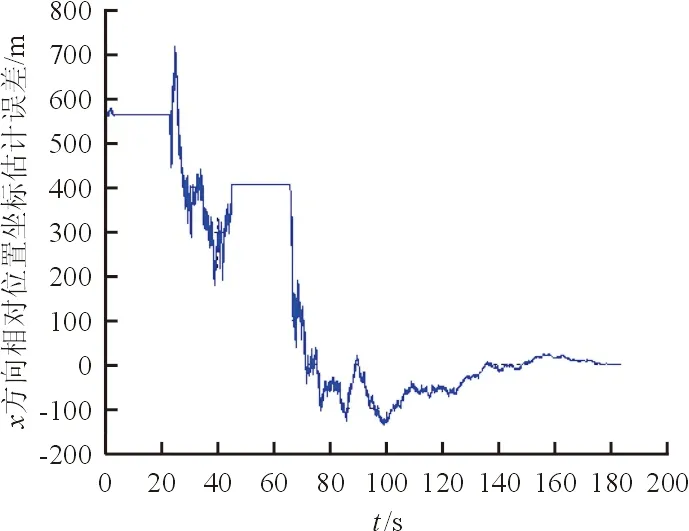
图3 x方向相对位置定位误差
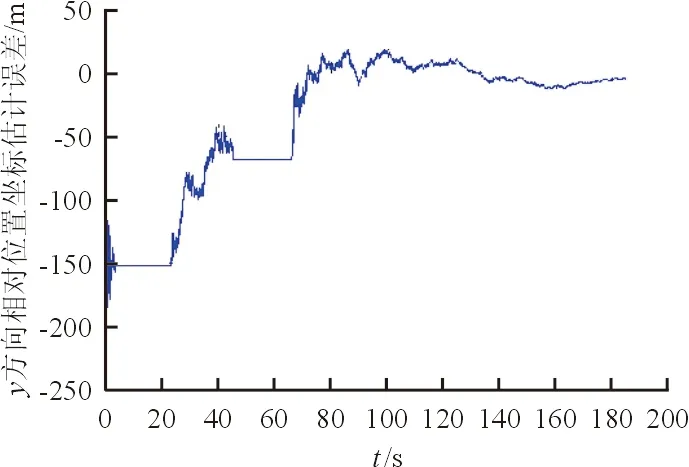
图4 y方向相对位置定位误差

图5 z方向相对位置定位误差
从图3~图5可以看出:采用本文所提观测量不等间隔时的被动定位滤波算法是收敛的,观测量的间断并未影响滤波算法整体的收敛性。
4 结 论
(1) 采用本文提出的滤波方法可以使探测信息间断时滤波误差不增加,且探测信息正常后滤波能恢复到正常的递推滤波。
(2) 本文提出的间断制导下的被动定位算法能够适用于定位过程存在信息间断的情况,具有较高的位置滤波精度,是一种既能用于连续探测信息被动定位,又能用于间断探测信息被动定位的滤波方法。
[1] 张丽艳, 张磊, 侯代文, 等. 基于推广卡尔曼滤波的无源定位系统仿真[J]. 大连交通大学学报, 2004, 25(4): 55-58. Zhang Liyan, Zhang Lei, Hou Daiwen, et al. Simulation of passive location system based on extend Kalman filtering[J]. Journal of Dalian Jiaotong University, 2004, 25(4): 55-58.(in Chinese)
[2] 朱学平, 杨军, 孙杰, 等. UKF在反辐射无人机抗目标雷达关机中的应用[J]. 火力与指挥控制, 2009, 34(7): 100-102. Zhu Xueping, Yang Jun, Sun Jie, et al. An application of UKF to antagonism against the radar stopping padiating of anti-radiation UAV[J]. Fire Control and Command Control, 2009, 34(7): 100-102.(in Chinese)
[3] 王勃, 朱学平, 杨军. 基于自适应UKF的反辐射无人机抗雷达关机技术研究[J]. 计算机测量与控制, 2012, 20(7): 230-232. Wang Bo, Zhu Xueping, Yang Jun. Study of anti-radiation UAV based on adaptive UKF to against radar switching off[J]. Computer Measurement & Control , 2012, 20(7): 230-232.(in Chinese)
[4] 王庆欣, 史连艳. 基于自适应UKF的反辐射导弹抗机动目标雷达短时关机研究[J]. 计算技术与自动化, 2011, 30(3): 72-75. Wang Qingxin, Shi Lianyan. Study on scheme against moving radar switching-off based on adaptive UKF[J]. Computing Technology and Automation, 2011, 30(3): 72-75.(in Chinese)
[5] 刘洋, 冯道旺, 郭福成. 自适应渐消UKF算法及其在仅测角被动定位中的应用[J]. 现代电子技术, 2011, 34(21): 6-8. Liu Yang, Feng Daowang, Guo Fucheng. Adaptive fading UKF algorithm and its application in bearing-only passive location[J]. Modern Electronics Technique, 2011, 34(21): 6-8.(in Chinese)
[6] 袁博, 杨军. 反辐射导引头抗诱偏技术研究[J]. 弹箭与制导学报, 2009, 29(2): 61-63. Yuan Bo, Yang Jun. The research on anti-bait technology of anti-radiation seeker[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2009, 29(2): 61-63.(in Chinese)
[7] 朱学平, 杨军, 祝小平. FDEKF在反辐射无人机抗目标雷达关机中的应用[J]. 飞行力学, 2008, 26(3): 89-92. Zhu Xueping, Yang Jun, Zhu Xiaoping. Application of FDEKF to antagonism against the radar stopping radiating of anti-radiation UAV[J]. Flight Dynamics, 2008, 26(3): 89-92.(in Chinese)
[8] 陈占海, 杨林冲, 杨亚丽. 基于MVEKF的空地反辐射导弹被动定位研究[J]. 指挥控制与仿真, 2013, 35(3): 60-62. Chen Zhanhai, Yang Linchong, Yang Yali. Research on Air-to-ground anti-radiation missile passive location based on MVEKF[J]. Command Control & Simulation, 2013, 35(3): 60-62.(in Chinese)
[9] 唐涛, 张涯辉, 黄永梅. 粒子滤波在被动定位跟踪中的运用[J]. 仪器仪表学报, 2005, 26(增刊1): 211-214. Tang Tao, Zhang Yahui, Huang Yongmei. Application of particle filter to target tracking of passive location[J]. Chinese Journal of Scientific Instrument, 2005, 26(S1): 211-214.(in Chinese)
[10] 曹东波. 反辐射无人机无源定位及航迹优化技术研究[D]. 长沙: 国防科学技术大学, 2010. Cao Dongbo. Study on passive location and optimal observer trajectories for anti-radiation unmanned aerial vehicle[D]. Changsha: National University of Defense Technology, 2010.(in Chinese)
[11] 许涛, 祝小平, 杨军. 有色噪声条件下的目标被动定位算法研究[J]. 计算机仿真, 2013, 30(5): 50-53. Xu Tao, Zhu Xiaoping, Yang Jun. Research on passive location algorithm for colored measurement noise[J]. Computer Simulation, 2013, 30(5): 50-53.(in Chinese)
(编辑:马文静)
Study on Passive Localization Algorithm of Anti-radiation Unmanned Aerial Vehicle under Intermittent Guidance
Liang Yongsheng, Tang Yong, Wang Meng
(Southwest China Research Institute of Electronic Equipment, China Electronics Technology Group Corporation, Chengdu 610036, China)
As one of effective methods for anti-radiation weapon against radar switching off, the passive-location algorithm has been well studied. However, most passive-location algorithm research has been undertaken based on the condition that anti-radiation seekers work continuously. Accordingly, a passive-location algorithm in view of discontinuous guidance for anti-radiation UAV(unmanned aerial vehicle) is studied, and a method to solve the problem based on the Kalman filtering is proposed. Simulated results are presented to demonstrate the effectiveness of the method. Results show that this method can be used for unequal interval discontinuous guidance and it has certain location accuracy.
anti-radiation; passive-location; unequal interval; discontinuous guidance; Kalman filtering
2017-01-05;
2017-05-06
梁永生,qq231765@126.com
1674-8190(2017)03-299-05
V249.1
A
10.16615/j.cnki.1674-8190.2017.03.008
梁永生(1973-),男,研究员。主要研究方向:电子对抗、精确制导总体设计技术。
唐 勇(1977-),男,硕士,高级工程师。主要研究方向:精确制导导引总体设计技术。
王 濛(1988-),男,硕士,工程师。主要研究方向:精确制导导引总体设计技术。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
北京航空航天大学学报(2021年4期)2021-11-24
北京航空航天大学学报(2021年7期)2021-08-13
天津外国语大学学报(2021年1期)2021-03-29
VOGUE服饰与美容(2020年5期)2020-09-03
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年9期)2017-12-18
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
太空探索(2014年1期)2014-07-10