人字闸门背拉杆预应力优化方法研究
2017-09-11 13:54邢述炳
武汉理工大学学报(交通科学与工程版) 2017年4期
邢述炳
(中设设计集团股份有限公司 南京 210014)
人字闸门背拉杆预应力优化方法研究
邢述炳
(中设设计集团股份有限公司 南京 210014)
人字闸门在自重、浮箱浮力、壅水荷载和风荷载的作用下将发生扭曲变形,预应力背拉杆是调整门体变形的重要构件.论述了启闭过程中人字闸门荷载与变形的基本特征,给出了基于门体侧倾量、门体扭转变位和门头下垂量的人字闸门形态控制函数.将每根背拉杆的预应力作为设计变量,将门体扭转变位与门头下垂量的矢量和作为目标函数,将背拉杆应力与门体变形的容许范围作为约束条件,通过有限元软件ANSYS进行优化分析.结果表明,以门体扭转变位与门头下垂量的矢量和作为目标函数进行优化,可得出了较为理想的人字闸门背拉杆预应力配对组合,使得门体在静止状态下垂直悬挂并在开关门过程中变位幅度最小,可作为启闭过程中人字闸门的形态控制指标.
人字闸门;背拉杆;预应力;多目标优化;扭转变位;门头下垂量
0 引 言
预应力背拉杆是提高人字闸门抗扭刚度、控制门体变形的重要构件.人字闸门在运行过程中常发生扭转和下垂等变形,通过调节主、副背拉杆中的预应力可使门体变形降低至相对合理范围.根据变形协调理论,能使门体垂直悬挂的主、副背拉杆预应力配对有无数种,如何确定背拉杆中的预应力配对一直是工程界的一大难题.
美国陆军工程师兵团率先提出预应力背拉杆计算理论,通过该理论可计算出主、副背拉杆预应力范围,人工选择后确定预应力值[1-3].随着计算机技术和优化理论的发展,借助有限元软件进行背拉杆预应力优化应运而生.基于该技术,我国在建设葛洲坝、三峡等船闸时,谭道宏等[4-6]做过背拉杆预应力的专题研究,该研究以斜接柱下角点的竖向位移(即门头下垂量)作为优化时的目标函数;因单一的门头下垂量不能全面反映门体整体变形状态,刘礼华等[7]将目标函数改进为由平整度和下垂度的加权和构成;又因加权和形态函数无明确物理意义,周金全等[8]将目标函数修改为由斜接柱下角点的竖向和侧向位移的矢量和构成,但斜接柱底部的单点位移量仍不能准确反映门体的扭转变位和门体变形.本文综合考虑门体的扭转变位和门头下垂量,将其矢量和作为控制门体形态的目标函数,有限元分析结果表明,该目标函数可较好地得出背拉杆的预应力配对,使门体在静止状态下垂直悬挂并在开关门状态下变位最小.因此该优化方法可以作为人字闸门形态控制的指标.
1 人字闸门受力与变形
1.1 人字闸门荷载与边界条件
人字闸门主要由主梁、次梁、横隔板、门轴柱、斜接柱、背拉杆、顶底枢和启闭支座等组成.根据运行工况的不同,人字闸门的受力状态主要分为关门挡水和启闭过程两种,其中启闭过程又可分为静止、开门和关门三种状态.当关门挡水时,两扇闸门门叶相互支撑呈三铰拱受力,此非本文讨论工况.本文重点论述与背拉杆受力较为密切的人字闸门启闭过程,在此工况下,闸门两扇门叶相互脱离并单独受力[9].
图1为启闭过程中作用于人字闸门上的荷载图.在荷载作用下,门体处于动平衡状态;若将启闭支座与顶枢、底枢作为约束支承点,启闭过程可按静平衡分析.
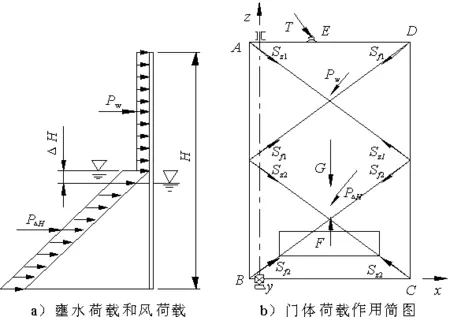
G-自重;F-浮箱浮力;PΔH-壅水压力;Pw-风压力;T-启闭力;Szi-主背拉杆预应力,Sfi-副背拉杆预应力.图1 启闭过程中作用于人字闸门上的荷载
1.2 人字闸门位移分析
人字闸门是大型开口薄壁结构,作用在门体上的外荷载均不通过门体剪力中心[10].在静止状态下,自重和浮力将使门体结构发生扭曲变形;在开关门过程中,壅水荷载和风荷载将加剧门体变形幅度.预应力背拉杆的应用,在静止状态下,通过施加背拉杆中的预应力平衡门体自重和浮箱浮力,使得门体垂直悬挂;其次,在开关门过程中,壅水荷载和风荷载产生的扭矩被背拉杆吸收,背拉杆中的预应力相应增大或减小,从而有效调节门体的扭曲变形.
引入直角坐标系:以人字闸门底枢为原点,主横梁方向为x轴,垂直于闸门面板向上游侧方向为y轴,底枢指向顶枢方向为z轴,将x,y,z三个方向的门体位移分别记为u,v,w.当门体扭转变形时,各几何点均会发生位移,若将自重单独作用下门体任意点j在x,y,z三个方向的位移分别记为ujg,vjg,wjg,将浮力单独作用下门体任意点j在x,y,z三个方向的位移分别记为ujf,vjf,wjf,则门体任意点j在x,y,z三个方向的和位移应为自重和浮力单独作用下位移的代数和,即ujg+ujf,vjg+vjf,wjg+wjf.
(1)
式中:uj为闸门上任意点j在x方向上的位移;vj为闸门上任意点j在y方向上的位移;wj为闸门上任意点j在z方向上的位移.
1.3 人字闸门形态描述
背拉杆预应力调试之前,先在门体上确定一个基准点和若干形态控制点.在顶枢Ux,Uy,底枢Ux,Uy,Uz及启闭支座Ux,Uy约束下,若以底枢为基准点,则基准点在预应力、自重及浮力单独作用下的x,y,z三方向位移均为0,形态控制点相对基准点的位移即为自身的位移.人字闸门门叶的抗弯刚度较抗扭刚度大,在背拉杆预应力施加及闸门运转过程中,门体形态主要表现在斜接柱的顶端及底端位移上.因为门轴柱中部位移较小,斜接柱中部及门体其他部位位移呈近似线性变化,故可仅选择斜接柱顶、底端作为启闭过程中的人字闸门形态控制点.记斜接柱顶端x,y,z位移分别为ut,vt,wt,斜接柱底端x,y,z位移分别为ub,vb,wb,则在预应力、自重和浮力共同作用下,斜接柱顶、底端相对于基准点的位移分别为
(2)
(3)
式中:ut为斜接柱顶端在x方向上的位移;vt为斜接柱顶端在y方向上的位移;wt为斜接柱顶端在z方向上的位移;ub为斜接柱底端在x方向上的位移;vb为斜接柱底端在y方向上的位移;wb为斜接柱底端在z方向上的位移.
人字闸门可视为由门轴柱、斜接柱和顶、底主梁组成的框体结构,在以顶枢、底枢和启闭支座为约束的静力平衡中,由顶枢A、底枢B和斜接柱底端C、顶端D构成的静止状态基础平面ABCD,在开门和关门时,斜接柱底端C和顶端D分别移动至C′和D′,见图2.
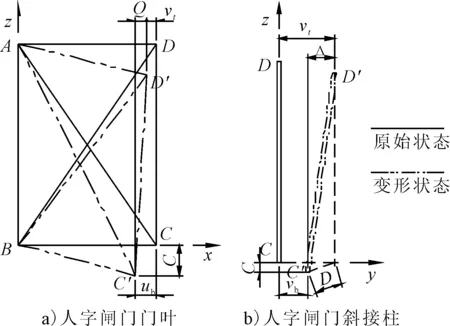
图2 人字闸门变形示意图
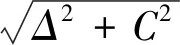
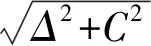
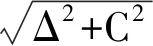
斜接柱底端C′相对动态平面ABD′的位移可分为平面外位移和平面内位移.当人字闸门扭转变形时,因门轴柱两端的顶、底枢不变,斜接柱顶、底端y向位移差可反映门体的平面外翘曲程度,即门体扭转变位,用Δ表示;当人字闸门下垂时,矩形框体接近平行四边形变形,斜接柱内部相对位移较小,斜接柱底端z向位移可反映门体平面内的下垂程度,即门头下垂量,用C表示;斜接柱顶、底端x方向的位移差可反映门体平面内的倾斜程度,即门体侧倾量,用Q表示.表达式为
(4)
式中:Q为人字闸门门体侧倾量;Δ为人字闸门门体扭转变位;C为人字闸门门头下垂量.
将式(2)~(3)代入式(4),得
(5)
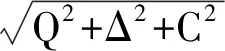
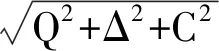
为了综合反映人字闸门的整体变形程度,通过闸门侧倾量Q、扭转变位Δ和下垂量C的平方根累加构成一个描述闸门形态的函数,即

(6)
式中:D(x1,x2,…,xn)为闸门的形态控制函数,综合表达人字闸门在背拉杆预应力、门体自重和浮箱浮力作用下,通过斜接柱顶、底端位移反馈的门体变形状态,形态控制函数的空间示意图见图3a),向量形式可写为D=Q+Δ+C.
人字闸门在自重、浮箱浮力、壅水荷载及风荷载下变形时,因为自重及浮箱浮力与z轴平行且为恒荷载,使门体在z方向上变形,故门头下垂量相对稳定,C为恒定变形;壅水荷载和风荷载与y轴平行但为活荷载,使门体在y方向上变形,故门体扭转变位不稳定,Δ为波动变形.此外,在背拉杆预应力作用下,虽然预应力可以分解出x方向分力,但x方向的变形相对y,z向的变形可以忽略不计,即门体侧倾量Q≈0.因此,仅考虑扭转和下垂这两种最重要的变形特征,不影响人字闸门调试运行中门体形态控制的精确性,从而将闸门的形态控制函数式简化为
(7)
将式(5)代入式(7),得人字闸门形态控制函数的详细表达式为
式(8)集中反映了人字闸门的扭转变形和下垂变形,其物理意义为:人字闸门斜接柱底端相对于顶枢、底枢、斜接柱顶端三点所确定的动态平面的位移,即人字闸门平面外位移(扭转变位Δ)与平面内位移(门头下垂量C)的矢量和,向量形式可写为D=Δ+C,见图3b).
图3 形态控制函数矢量图
2 背拉杆预应力的优化
2.1 优化计算的数学模型
人字闸门在启闭过程中,门体自重和浮箱浮力均为定值,壅水荷载和风荷载可按最不利值确定,此时门体的形态仅取决于每根背拉杆的内力分量,即各杆预应力值x1,x2,…,xn.在进行分析时,将x1,x2,…,xn作为优化的设计变量,将以x1,x2,…,xn为自变量的闸门形态控制解析函数D(x1,x2,…,xn)的最小值作为优化的目标函数,将背拉杆预应力及门体变形的控制范围作为优化的约束条件,寻求x1,x2,…,xn之间最佳匹配.

Xj=xj+σj
(9)
(10)
σj=σjg+σjf+σjΔH+σjw
(1)
式中:σjg为闸门自重单独作用下第j根背拉杆产生的应力;σjf为浮箱浮力单独作用下第j根背拉杆产生的应力;σjΔH为壅水荷载单独作用下第j根背拉杆产生的应力;σjw为风荷载单独作用下第j根背拉杆产生的应力.随着壅水荷载和风荷载的变化,σj有最大值σjmax和最小值σjmin.
根据规范,人字闸门在启闭过程中,背拉杆的最大拉应力不应大于背拉杆材料的容许应力[σ]max,最小拉应力[σ]min不应小于10 MPa,由此构成预应力优化中的应力约束条件.人字闸门侧倾量Q、扭转变位Δ和门头下垂量C的允许范围则作为优化中的位移约束条件.
根据以上分析,人字闸门背拉杆预应力优化计算的数学模型可表达为
(12)
式中:[Q]为容许门体侧倾量值;[Δ]为容许门体扭转变位;[C]为容许门头下垂量.
由此,将人字闸门背拉杆预应力的优化计算转换为一个n维的线性规划问题.
2.2 优化计算的过程及结果
以某Ⅲ级船闸人字闸门为例,该门体尺寸为14.26 m×13.584 m×1.5 m(高×宽×厚),采用单交叉式背拉杆,故优化变量仅为2个,即x1(σz)和x2(σf).通过ANSYS建立人字闸门的有限元模型,见图4.
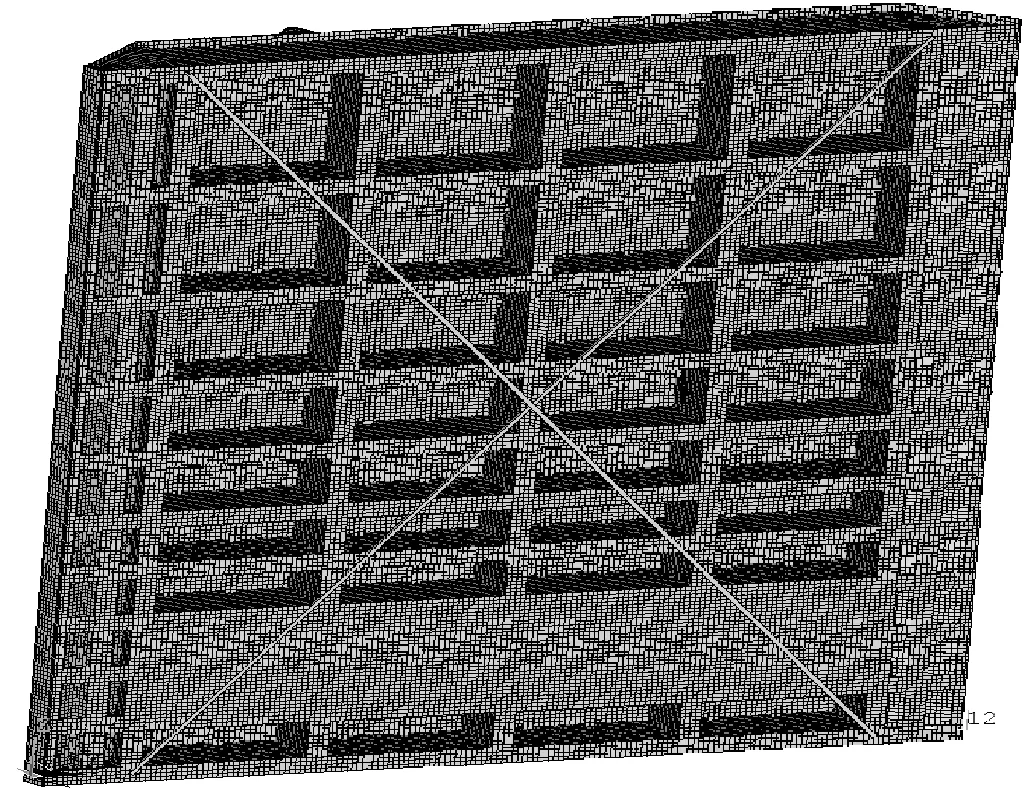
图4 人字闸门有限单元模型
为安全起见,取静止状态下背拉杆最小应力输入值[σ]min=20 MPa,最大应力输入值[σ]max=120 MPa;容许门体侧倾量[Q]=2.0 mm,容许扭转变位[Δ]=5 mm,容许门头下垂量[C]=4.0 mm.采用ANSYS的OPT模块进行预应力优化,经过九次迭代计算,收敛得出工程最优解:主背拉杆最佳预应力输入值σz=77.2 MPa,副背拉杆最佳预应力输入值σf=58.7 MPa,此时有目标函数D的最小值,其收敛曲线见图5.人字闸门在自重、浮力及此预应力组合作用下,有形态函数最小值Dmin=0.49 mm,此时人字闸门门头下垂量C=0.49 mm,门体扭转变位Δ=0.05 mm,可以认为预应力优化结果基本实现了静止工况下门体的垂直悬挂.
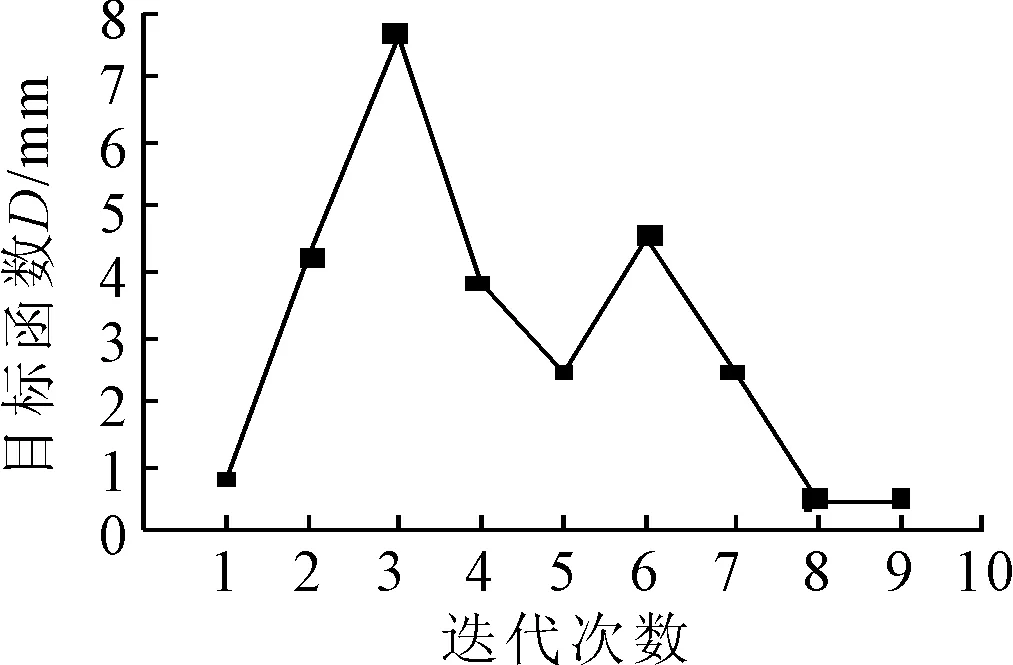
图5 目标函数D的收敛曲线
2.3 优化目标函数的比较

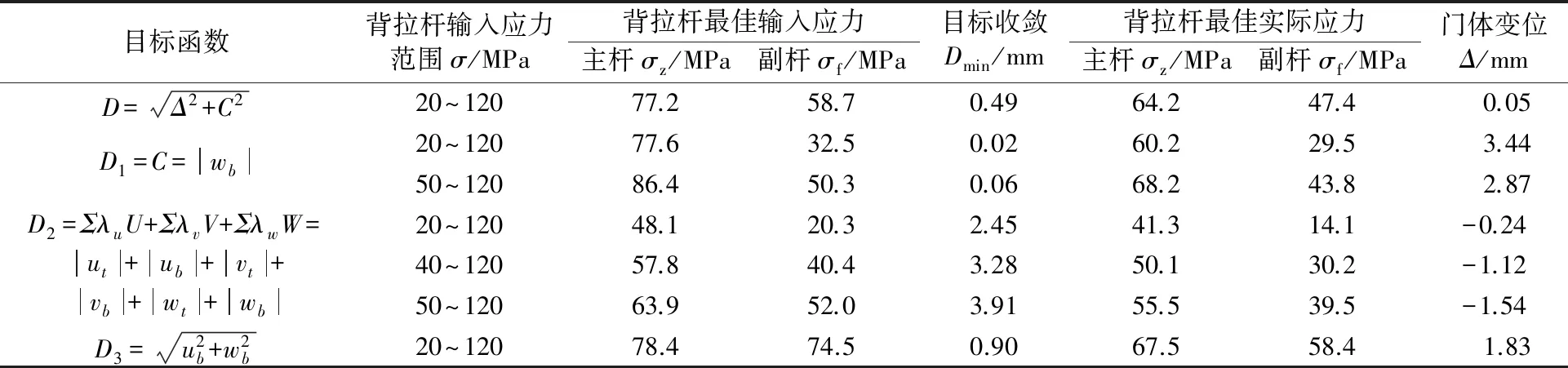
表1 静止工况下不同目标函数对应的背拉杆预应力优化结果及门体变位
在开门和关门工况下,壅水压力和风压力作用于门体,随着其方向的改变,原静止状态下的背拉杆预应力将会增大或减小,见表2.
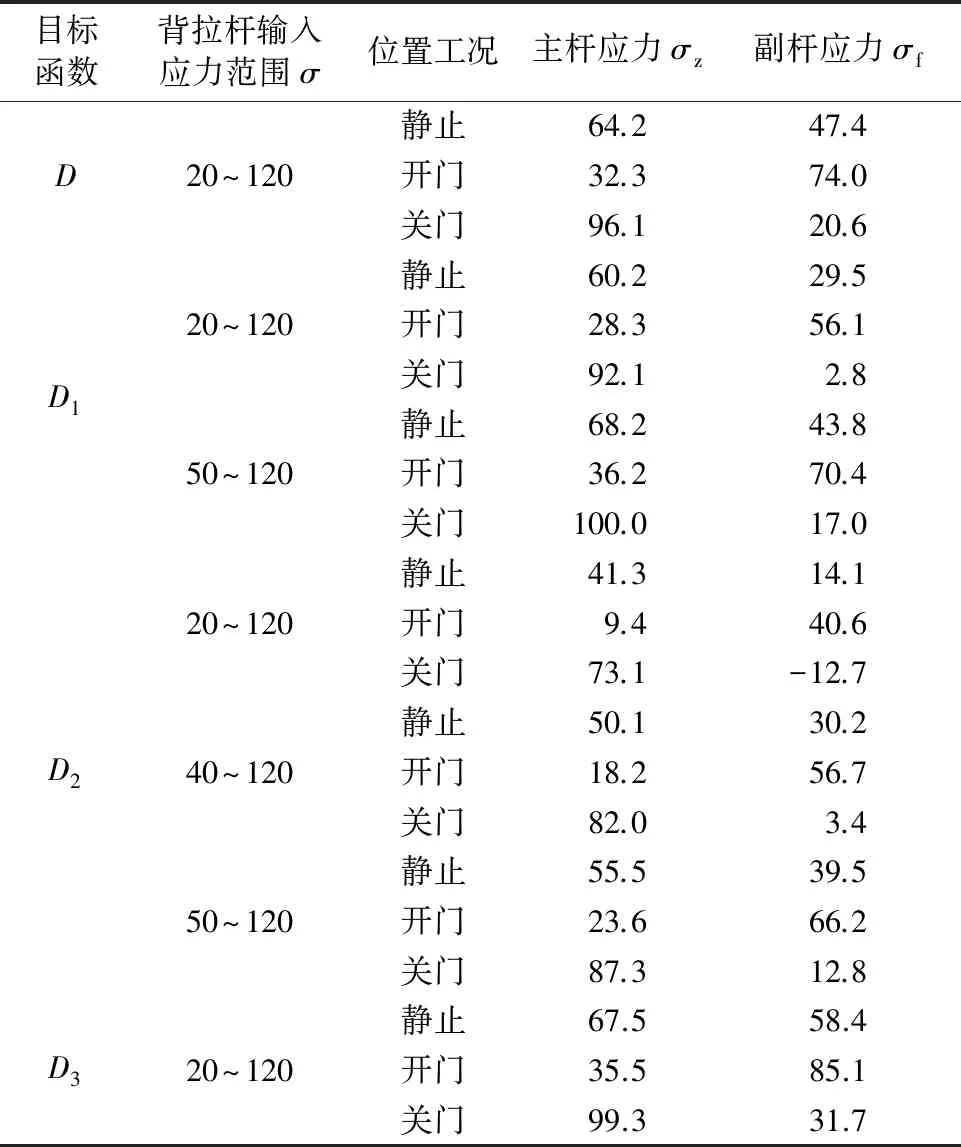
表2 不同目标函数对应的背拉杆实际应力 MPa
由表2可知,人字闸门在开关门过程中主、副背拉杆的预应力存在此消彼长的关系.应力浮动期间,在D1和D2目标函数下背拉杆存在应力超出设定范围甚至变成压杆的现象.如:在20~120 MPa范围内,D2关门时副背拉杆实际应力将由静止状态的14.1 MPa降至-12.7 MPa.相对D1、D2和D3,当D作为优化目标函数时,背拉杆的应力幅值相对其他目标函数居中,不易因应力太高而发生断裂或应力过低而变为压杆.
预应力背拉杆受压后将失效,为不致预应力超出设计规范,目标函数D1和D2仅可选择50~120 MPa范围内的收敛结果,再与目标函数D、D3比较开关门过程中门体扭转变位的变化.不同目标函数下人字闸门的扭转变位,见图6.
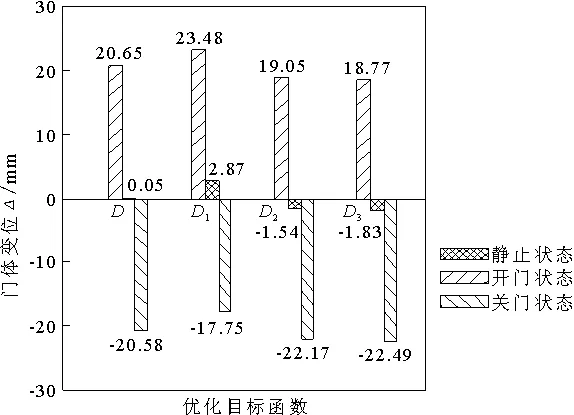
图6 不同目标函数下人字闸门的扭转变位
3 结 论
[1]Department of the Army U S. Army corps of engineers. engineering and design of lock gates and operating equipment:EM 1110-2-2703[R]. Washingtong DC: Department of the Army U S, 1984.
[2]陈家伟.船闸人字闸门背拉杆预应力实验和研究[J].武汉水利电力学院学报,1986(4):102-112.
[3]邢述炳.浮箱结构船闸人字闸门预应力背拉杆设计[J].水运工程,2013(8):147-151.
[4]谭道宏.人字闸门斜杆预应力优化研究[J].武汉水利电力大学学报,1995, 28(3): 231-236.
[5]何文娟.人字闸门设计中几个问题的研究[J].水利学报, 1999(7):17-21.
[6]曾又林,何文娟,张宏志,等.樊口船闸人字门背拉杆预应力优化计算与调试[J].武汉大学学报(工学版),2003,36(2):37-40.
[7]刘礼华,杨斌,邵倩等.基于形态函数的船闸人字门背拉杆预应力优化计算及调试方法[J].武汉理工大学学报(交通科学与工程版),2013,37(5):914-918.
[8]周金全,徐远杰,楚锡华,等.船闸人字门背拉杆预应力优化设计[J].计算机辅助工程,2015,24(1):53-56.
[9]邢述炳,黄珑,朱召泉.船闸人字闸门浮箱的设置方法[J].水运工程,2016(8):112-118.
[10]邢述炳,丁峰.人字闸门背拉杆的结构特性分析[J].水运工程,2016(11):157-161.
Research on Optimization Methods of Back-tie Rods Prestress of Miter Gate
XING Shubing
(ChinaDesignGroupCo.Ltd.,Nanjing210014,China)
Miter gate will be distorted under the effect of dead load, buoyancy force of buoyancy tank, backwater load and wind load. Prestressed back-tie rod is an important part to adjust the distortion of gate. The paper discusses the basic features of loads and distortion of miter gate in start-stop process, presents morphological control function of miter gate based on the sidesway and torsional deflection of gate and droop of the gate head. It takes the prestress of each piece of the back-tie rod as the design variable, sum vector of torsional deflection of gate and droop of gate head as the objective functions. In addition, it takes the allowable range of the back-tie rods prestress and gate deformation as the constraint conditions for optimization analysis through finite element software ANSYS. The analysis result shows that taking the sum vector of torsional deflection of gate and droop of gate head as the objective functions for optimization can obtain ideal miter gate back tie rod prestress pairing combination to make the gate hang perpendicularly in the idle state and have smallest range of displacement during opening and closing the door, which can be deemed as morphological control index of opening and closing miter gate.
miter gate; back-tie rods; prestress; multi-objective optimization; torsional deflection; gate head drooping
2017-03-30
U641.3
10.3963/j.issn.2095-3844.2017.04.025
邢述炳(1984—):男,硕士,高级工程师,主要研究领域为工程结构与力学
猜你喜欢
日用电器(2021年6期)2021-07-19
日用电器(2019年8期)2019-09-03
现代交际(2017年19期)2017-10-23
西安交通大学学报(2016年10期)2016-12-22
铁道机车车辆(2016年3期)2016-10-25
锻压装备与制造技术(2016年3期)2016-06-05
西南军医(2016年3期)2016-01-23
云南畜牧兽医(2015年4期)2015-02-28
中国药业(2014年19期)2014-05-17
振动、测试与诊断(2014年4期)2014-03-01