
基于遗传算法的纯电动汽车动力传动系统优化
2017-09-12 06:35姜顺明赵广宣
重庆理工大学学报(自然科学) 2017年8期
姜顺明, 赵广宣
(江苏大学 汽车与交通工程学院, 江苏 镇江 212013)
基于遗传算法的纯电动汽车动力传动系统优化
姜顺明, 赵广宣
(江苏大学 汽车与交通工程学院, 江苏 镇江 212013)
以某一型号的单挡纯电动汽车作为研究对象,在基于动力系统参数分析的基础上,对整车合理匹配两挡AMT变速器,并基于ADVISOR仿真平台建立整车仿真模型。应用遗传算法工具箱与ADVISOR非图形化界面联合优化以实现自动优化动力系统参数的目的,获得动力性和经济性最优匹配结果。仿真结果表明:该优化方法能有效地提高纯电动汽车的性能。
ADVISOR非图形化界面;纯电动汽车;遗传算法
随着自然资源的短缺和环境的日益恶化,新能源汽车尤其是纯电动汽车因其效率高、零排放等优点成为各国汽车制造厂商日益关注的焦点。驱动电机作为纯电动汽车唯一的动力源,需要满足汽车的不同行驶工况,因此对驱动电机的性能提出较高的要求。电机与传动系速比的匹配直接影响了整车动力性和经济性。不同的变速器对纯电动汽车动力性和经济性有较大的影响[1],市面上所售的电动汽车大部分是单挡变速器,与固定速比变速器相比,两挡位变速器对电机的性能要求较低,具有更高的加速性能和经济性能。通过优化传动系速比使整车在满足动力性能的前提下,使电机工作在高效率区间,这对于提高整车续驶里程有非常重要的意义。
ADVISOR是一款基于Matlab/simulink开发的整车性能仿真软件。使用ADVISOR有助于进行汽车的整车性能分析,整车机构、动力匹配,功率合成和工况测试及开发等[2]。本文通过ADVISOR提供的非图形用户界面下联合遗传算法优化工具箱对整车进行优化。
1 整车参数
1.1 整车布置方案
本研究的纯电动汽车为两挡变速比的纯电动汽车,去除原来传统的离合器等零部件,电机和两挡减速器连接在一起,该布置结构相对紧凑,机械传动效率较高。1挡为起步和爬坡挡位,2挡为正常行驶挡位。整车动力系统布置方案如图1所示。

E-动力电池; M-驱动电机; AMT-两档变速器; F-主减速器; D-差速器
1.2 动力系统参数
某纯电动汽车整车参数及动力性能要求见表1,电机参数见表2,动力电池参数见表3。

表2 电机参数

表3 动力电池参数
1.2.1 电机效率模型
电机效率可以用数学模型来描述,即将电机效率看作电机转速和转矩的数学函数。其数学模型表达为
(1)
其中:η为电机效率;T为电机转矩;n为电机转速;A为数学模型的各项系数;s为数学模型的阶数。
根据实际测量的电机效率数据建立效率图,见图2。

图2 电机效率
1.2.2 变速器的参数的确定
根据最高车速确定2挡传动比的上限:
(2)
其中:r为车轮半径;nmax为电机最高转速;umax为设计最高车速。计算得i0i2≤5.32。
根据电机的最高转速对应的最大输出转矩和最高稳定车速对应的行驶阻力确定2挡传动比的下限:

(3)
其中:TVmax为电机最高转速对应的最大输出转矩;Cd为空气阻力系数;A为迎风面积。计算得i0i2≥3.52。
根据最大爬坡度确定最大传动比[3]:

(4)
其中α为坡道角。计算得i0i1≥5.91。
在1挡驱动条件下,最大驱动力必须小于或等于地面对轮胎的附着力,防止打滑:

(5)
其中:FZ为地面对驱动轮的法向反作用力;φ为附着系数。计算得i0i1≤9.77。

变速器和主减速器速比见表4。

表4 变速器和主减速器速比
换挡控制策略:由于ADVISOR是单参数换挡,因此本文选用基于速度的单参数换挡策略,以最佳经济性换挡确定换挡点。由电机的效率图可知电机在2 500~4 000 r/min效率较高,因此为保证经济性,尽量使电机在此区间工作。根据电机转速与汽车车速之间的关系及两挡在电机2 500~4 000 r/min转速的车速覆盖区间综合考虑,确定 50 km/h车速为换挡点。
2 基于遗传算法的参数优化
动力传动系统优化的参数为两档传动比i1、i2和主减速比i0,因此设计变量为:
X=[X1,X2,X3]T=[i1,i2,i0]T
2.1 ADVISOR非GUI仿真原理
ADVISOR(advanced vehicle simulator,高级车辆仿真器)是由美国可再生能源实验室NREL(national renewable energy laboratory)在Matlab/Simulink软件环境下开发的高级车辆仿真软件平台[4]。为了满足用户对ADVISOR部分仿真过程自动化,尤其是与外部工具如优化软件包连接的需求, ADVISOR提供的非图形用户界面进行优化仿真[5]。
将本文设计的整车参数和传动系参数通过修改m文件的方式编入模型中。
运行循环工况采用代表市区工况的FTP工况。由于本模型是纯电动汽车,所以运行FTP工况后所得的结果为该工况所消耗的电量,单位为 kW·h/100 km。运行0~50 km/h和50~80 km/h加速试验并获得加速时间t1、t2,单位为s。
电动汽车通过再生制动时回收制动能量以提高续驶里程。在ADVISOR中,制动力的分配随着车速的变化而变化,前轮电机的再生制动分配和前轮摩擦制动力分配系数随车速的变化如图3所示。

图3 制动力分配
2.2 遗传算法程序的编制
遗传算法是模拟生物在自然环境中的遗传和进化的一种自适应全局优化概率搜索算法。遗传算法工具箱GATBX是英国设菲尔德(Sheffield)大学开发的基于Matlab的遗传算法工具箱,用户可以通过实际分析的需要编写M文件达到优化的目的[6]。
2.2.1 惩罚函数的确定
罚函数法是解决有约束非线性最优化的方法,其基本思想是通过建立罚函数而把有约束问题化为一系列无约束问题来处理求解最优化问题[7]。如果个体不满足约束条件,则增大该个体的目标值,以减小其影响下一代的概率,其数学描述[8]为:
式中:ObjV为原目标函数;Fobj为新的目标函数;fi(X)为约束条件;α为惩罚因子α>0且α→+∞。
2.2.2 多目标优化优化问题的转化
目标函数采用多目标加权系数法,工况耗电量e作为经济性目标。通常情况下,如果整车满足加速性能的要求,那么最高车速性能和最大爬坡性能也会满足要求,因此选择0~50 km/h加速时间t1、50~80 km/h加速时间t2之和作为动力性目标。目标函数表达式为:ObjV=λ1·ObjV1+λ2·ObjV2,且λ1+λ2=1。
由于经济性目标的单位为kW·h/100 km,动力性目标的单位为s,有量纲上的差异,不能直接相加,因此需要做量纲为一处理[9]:


式中emin和tmin分别为单个目标函数的最优解。
2.2.3 约束条件的确定
根据前文计算的结果可得,整车要满足最大车速和最大爬坡度的动力性要求以及换挡要求的速比区间为[10]:
f1(X)=5.32-i0i2
f2(X)=i0i2-3.52
f3(X)=i0i1-5.91
f4(X)=9.77-i0i1
f5(X)=i1-1.4·i2
f6(X)=1.8·i2-i1
2.2.4 遗传算法优化步骤
遗传算法流程见图4。
遗传算法优化步骤[11]如下:
1) 编码
从表现型到基因型的映射成为编码。采用二进制编码,实现二进制串到实值的转换。解空间与搜索空间具有一一对应的关系。本文中个体染色体长度PRECI为20,优化变量个数NVAR为3(两挡变速比和主减速比)。

图4 遗传算法流程
2) 初始群体的生产
创建初始种群,产生N个初始串结构数据,每个串结构数据称为1个个体,N个个体成为1个群体,确定了初始的搜索空间。本文中初始种群数NIND为80。
3) 计算适应度值
适应度函数值表明个体或解的优劣性,本文采用基于排序的适应度分配。
4) 选择
从种群中选择个体,根据各个个体的适应度值从上一代群体中选择出一些优良的个体遗传到下一代群体中。本文中的代沟GGAP设为0.9。
5) 交叉
重组个体,将群体内的各个个体随机搭配成对,对于每个个体以交叉概率交换部分染色体,形成新一代的个体。本文交叉概率选为0.7。
6) 变异
对于群体中随机的一个个体,以一定的概率随机改变其基因。遗传算法中变异发生的概率很低。变异为新个体的产生提供了机会。
7) 运算终止判断
判断是否符合优化标准,若符合优化标准,输出最优解。若不符合,则对群体重新进行选择、交叉、变异运算,直至输出最优解。本文遗传算法终止代数MAXGEN设为50。
3 仿真分析及结果对比
经过遗传算法的优化,获得优化后速比与优化前的对比,见表5。FTP工况下变速器工作点见图5。优化前后整车性能的对比见表6。单挡时电机工作点和两挡优化后电机工作点见图6和图7。单挡与两挡优化后性能参数的对比见表7。

表5 优化前后速比的对比
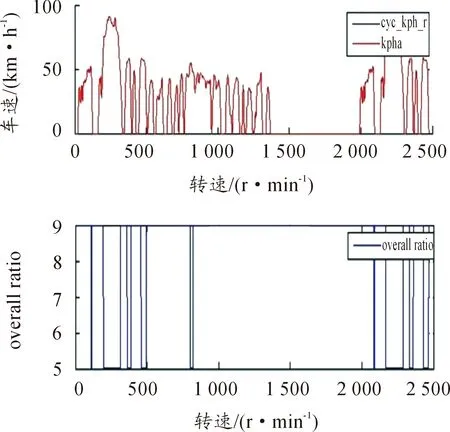
图5 FTP工况下变速器工作点

参数优化前优化后比较0~50km/h加速时间/s4.74.6减小2%50~80km/h加速时间/s5.25.3增加2%最高车速/(km·h-1)119.5126.7增加6%最大爬坡度/(°)32.735.2增加7.6%FTP工况100km能耗/(kW·h)16.80216.335降低2.8%
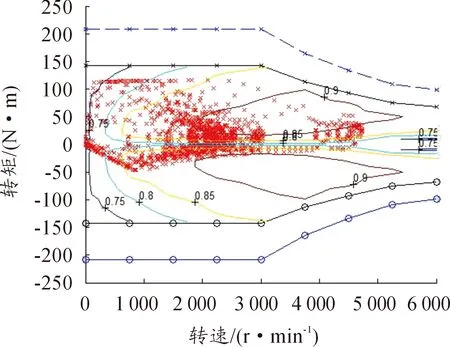
图6 单挡时电机工作点

图7 两挡优化后电机工作点
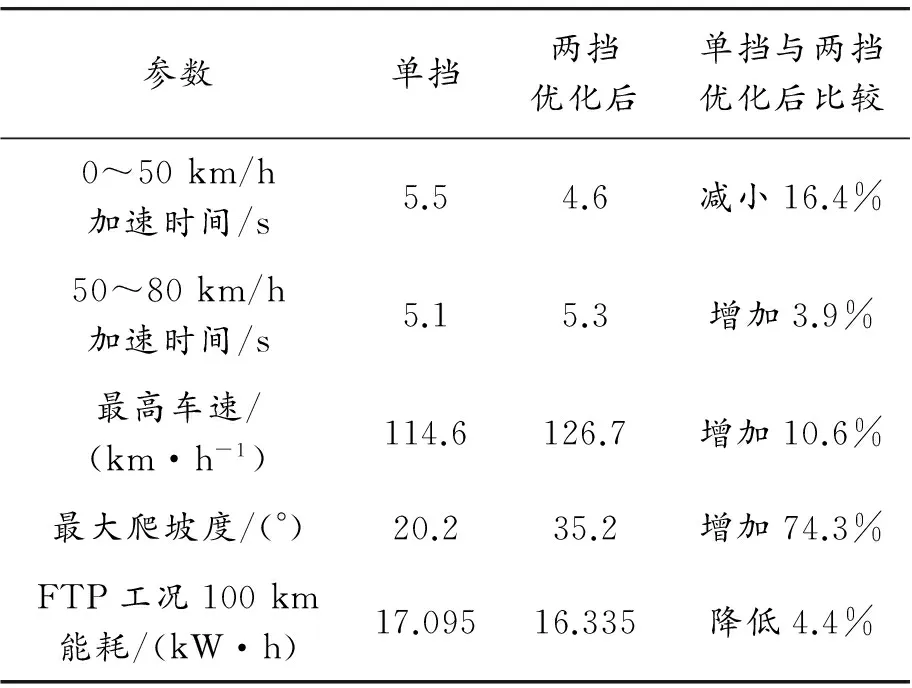
参数单挡两挡优化后单挡与两挡优化后比较0~50km/h加速时间/s5.54.6减小16.4%50~80km/h加速时间/s5.15.3增加3.9%最高车速/(km·h-1)114.6126.7增加10.6%最大爬坡度/(°)20.235.2增加74.3%FTP工况100km能耗/(kW·h)17.09516.335降低4.4%
由表6、表7数据可知:优化后的FTP工况和HWFET工况经济性比优化前都有所提升,动力性指标0~50 km/h加速时间、最高车速和最大爬坡度都有所提升,尤其是0~50 km/h加速时间和最大爬坡度性能提升更大。
4 结束语
仿真分析的结果表明:经过遗传算法的优化后,该纯电动汽车动力性和经济性能都有了一定的提升。本文通过整车仿真软件ADVISOR所提供的非图形化界面与Matlab遗传算法工具箱GATBX联合优化动力系统参数,仿真结果证明该方法对于动力系统优化是较为合理、有效的。
[1] REN Q,CROLLA D A, MORRIS A.Effect of Transmission Design on Electric Vehicle Performance[J].Journal of Energy and Power Engineering,2010,4(3):28.
[2] WANG Liangmo,BAI Weijun.Devleopment and Simulation of Electric Vehicle Based on ADVISOR[J].Journal of Southeast Univeristy(English Edition),2006,22(2):196-199.
[3] 余志生.汽车理论[M].北京.机械工业出版社,2009.
[4] 周胜,周云山.纯电动汽车动力匹配及计算仿真[J].计算机仿真,2013,30(2):135-139.
[5] 曾小华,宫维钧.ADVISOR20002电动汽车仿真与再开发应用[M].北京:机械工业出版社,2014.
[6] 雷英杰,张善文.MATLAB遗传算法工具箱及应用[M].西安:西安电子科技大学出版社,2005.
[7] 尹冰声,孙跃东.罚函数法在汽车传动系统最优匹配中的应用[J].机械设计与制造,2004,6(11):4-5.
[8] 雷嗣军,宋晓文.遗传算法与ADVISOR联合优化仿真汽车动力传动系统[J].机械科学与技术,2010,29(9):1137-1141.
[9] 李剑平.基于遗传算法的汽车传动系参数优化[J].拖拉机与农用运输车,2008,35(4):63-67.
[10]郭孔辉,姜辉.电动汽车传动系统的匹配及优化[J].科学技术与工程,2010,16(10):3892-3896.
[11]ANDREW C,PERTER F,HARTMUT P,et al.Genetic Algorithm Toolbox User’s Guide[M].UK:Department of Automatic Control and Systems Engineering,University of Sheffield,1994.
(责任编辑 刘 舸)
Optimization of Electric Vehicle Powertrain System Based on Genetic Algorithm
JIANG Shunming, ZHAO Guangxuan
(School of Automotive and Traffic Engineering, Jiangsu University, Zhenjiang 212013, China)
Based on the vehicle parameters and the design requirements, the electric vehicle(EV) parameter with two speed gearbox is matched and the model of the EV is built using the vehicle simulator ADVISOR(advanced vehicle simulator). The combination of the genetic algorithm toolbox and runing the ADVISOR without GUI is applied to optimize the powertrain parameters automatically. And the simulation results verify that the matching results meet the design requirements and the genetic algorithm can improve the dynamic and economic performance of electric vehicles.
ADVISOR; pure electric vehicle; genetic algorithm
2017-01-10 基金项目:国家自然科学基金资助项目(51575239)
姜顺明(1976—),男,博士,副教授,硕士生导师,主要从事车内声环境分析与主动、被动控制的研究,E-mail:seujsm@163.com; 通讯作者 赵广宣(1989—),男,硕士研究生,主要从事新能源汽车研究,E-mail:guangx_zhao@163.com。
姜顺明, 赵广宣.基于遗传算法的纯电动汽车动力传动系统优化[J].重庆理工大学学报(自然科学),2017(8):1-6.
format:JIANG Shunming, ZHAO Guangxuan.Optimization of Electric Vehicle Powertrain System Based on Genetic Algorithm[J].Journal of Chongqing University of Technology(Natural Science),2017(8):1-6.
10.3969/j.issn.1674-8425(z).2017.08.001
U462.2
A
1674-8425(2017)08-0001-06
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
内燃机与配件(2020年3期)2020-09-10
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
汽车工程(2016年11期)2016-04-11
汽车维护与修理(2015年5期)2015-02-28
噪声与振动控制(2015年4期)2015-01-01
汽车工程(2014年7期)2014-10-11
客车技术与研究(2014年1期)2014-03-20
