
电动汽车低速转向电子差速兼顾辅助转向控制
2017-09-12 06:35张厚忠
重庆理工大学学报(自然科学) 2017年8期
张厚忠,苏 健,张 勇
(江苏大学 a.汽车工程研究院; b.汽车与交通工程学院, 江苏 镇江 212013)
电动汽车低速转向电子差速兼顾辅助转向控制
张厚忠a,苏 健b,张 勇b
(江苏大学 a.汽车工程研究院; b.汽车与交通工程学院, 江苏 镇江 212013)
针对后轮独立驱动电动轮汽车转向差速控制技术,基于电动轮汽车低速转向特性,建立阿克曼转向差速模型。考虑电子差速控制对车辆转向的辅助作用,对电动轮汽车低速转向时电子差速兼顾辅助转向控制进行研究。仿真结果表明:基于阿克曼转向模型的转矩分配策略,不仅实现了基本的差速功能,对车辆转向行驶也有一定辅助作用。进行了电子差速控制实车试验,结果表明:控制策略能较好地应用于试验车辆。
电动轮汽车; 阿克曼转向模型;差速; 辅助转向
电动轮汽车以其传动机构简单、各驱动轮转矩独立精确可控等特点,在车辆转向动力学、驱动力矩分配以及行驶安全性等方面具有显著优势[1-5]。电动轮汽车与传统汽车在结构上有很大的不同,其在汽车行驶过程中不能应用传统的机械差速器,因此电子差速器成为电动汽车的研究重点之一[6]。
目前,电动汽车在城市交通中的行驶车速、转向车速均较低,因此可以根据其低速行驶、转向的特性,采用适当控制算法,在保证转向差速性能的同时,降低差速控制复杂程度以及成本[7-9]。文献[10]将电机的转速和转矩同时考虑, 提出了基于神经网络PID的转向差速与转速转矩综合控制策略,其虽在低速情况下有较好的差速效果,但存在响应慢和控制复杂等问题。文献[11]对轮毂电机四轮独立驱动纯电动汽车进行了适用于低速转向行驶时的阿克曼差速算法的研究,验证了阿克曼差速算法的可行性,但没有考虑到电子差速对车辆转向半径的影响。本文基于后轮驱动电动轮汽车低速转向特性,建立阿克曼转向差速模型,考虑电子差速控制对车辆转向的辅助作用,对电动轮汽车低速转向时电子差速兼顾辅助转向控制进行研究。
1 阿克曼转向差速模型
车辆转向过程中,依据阿克曼转向模型,可得车辆运动状态,如图1所示。图1中:δin和δout为内外前轮转向角;δ为车辆的转向角;L和W分别为车辆的轴距和轮距;R0为车辆转向半径;Rin和Rout分别为内外侧驱动轮转向半径;v为车辆行驶速度,即后轮轴线中点处绕转向中心O的速度。
根据以上阿克曼转向模型,可对电动汽车的运动状态进行分析。在阿克曼转向几何关系中,各车轮所经路径的圆心大致交于后轴延长线的瞬时转向中心上,这样使得转向更加顺畅,并可得出以下公式:
R0=L/tanδ
(1)
r0=L/sinδ
(2)
Rin=R0-W/2
(3)
Rout=R0+W/2
(4)

(5)

(6)
此外,两侧驱动轮转速为:
vin=ω·L/tanδin
(7)
vout=ω·L/tanδout
(8)
本文所要研究的重点是电子差速辅助转向,即将驱动轮主动差速同前轮转向结合起来,研究电子差速对车辆转向半径、行驶路径及转向盘力矩等的影响。如图1所示,若将驱动轮主动差速同前轮转向方式结合起来,根据阿克曼转向模型结构,车辆瞬时转向中心点和重合的条件得到满足,此时转向过程会变得顺畅,转向轮与驱动轮与地面之间的摩擦极小,车辆发动机功率主要用于转向行驶,而不是消耗在轮胎与地面之间的摩擦转矩上,有效地避免了循环功率的产生[12-13]。
图1 阿克曼转向模型
由图1可以看出:在车速不变的情况下,增大外侧驱动轮转速并减小内侧驱动轮转速,此时后轮的瞬时转向中心在后轴延长线上前轮的瞬时转向中心的内侧,即在驱动轮主动差速与转向轮偏转角的共同作用下,需要增大转向轮偏转角,使得瞬时转向中心和能够重合,在达到顺畅转向的同时,也有减小转向半径的趋势。
另一方面,后驱动轮差动驱动对车辆引入一个正横摆力偶矩,如图2所示。对差动驱动车辆进行受力分析可得:
Mzd=(Fx1-Fx2)·dr
(9)

(10)

(11)
式中:Fx1、Fx2分别为后驱动轮驱动力;αf、αr分别为前后轮侧偏角;δf为前轮转角;R为转弯半径。在该正横摆力偶矩的作用下,前轮侧偏角减小而后轮侧偏角增大,不仅减小了车辆不足转向,还提高了路径跟随能力[14]。根据式(11)可知:在转弯半径相同的情况下,所需要的前轮偏转角相对变小,因此可以说驱动轮主动差动驱动所引入的正横摆力偶矩在一定程度上间接地减小了方向盘转矩。但此横摆力偶矩不宜过大,只需在中低车速转向时减小一定的驾驶员转动方向盘的力,而不至于使车辆趋于不稳定。因此,在保证车辆稳定性的前提下,利用好此横摆力偶矩可以使电子差速辅助转向发挥更大功效。
图2 后轮驱动电动轮汽车差动驱动受力示意图
2 差速兼顾辅助转向控制
2.1 基于阿克曼转向模型的转矩分配策略
将阿克曼转向模型应用于电动轮汽车,需要采集驾驶员对方向盘的输入转角、车速以及动力学模型参数,计算出各车轮转速和转弯半径,最终得出内外侧驱动轮的转矩差值,并根据驾驶员所期望的总驱动力矩,对内外侧驱动轮转矩进行分配,使得内外侧车轮产生转速差以实现转向差速功能。电子差速控制策略结构示意图如图3所示。
当车辆直线行驶时,可认为两侧驱动轮垂直载荷相同,其大小如式(12)所示。当车辆转向时,由于向心力的作用产生侧翻力矩,使两侧车轮垂直载荷发生变化。

(12)
式中:Lr为质心到后轴距离;m为汽车质量;g为重力加速度。

图3 电子差速控制策略结构示意图
转向时的侧翻力矩:
MF=FnH
(13)
式中:Fn为向心力;H为质心离地面高度。
转向过程中后轮载荷:

(14)
(15)
又有

(16)
式中:v为汽车速度;W为车轮轮距;r为质心到转向中心距离。
根据前人研究成果可得到两侧驱动轮转矩之比为

(17)
根据此转矩分配比K(v,δ)和期望的总驱动转矩Td,可得两侧驱动轮转矩之差:
(18)
为了使汽车总驱动力矩保持不变,采用等差值转矩分配的方法,因此分配给两侧驱动轮的转矩值分别为:
Tin=Td-ΔT
(19)
Tout=Td+ΔT
(20)
在车辆转向过程中,车辆控制系统采集油门踏板信号,给出相应的总驱动力矩,结合采集到的方向盘转角和车速信号,计算出两侧驱动轮的转矩。通过增大外侧驱动轮转矩和减少内侧驱动轮转矩,不仅实现了电子差速功能,还合理分配了驱动轮转矩,产生正横摆力偶矩,从而对车辆转向起到辅助作用。
利用Matlab/Simulink建立转矩分配控制各子模型,包括转矩分配比K(v,δ)、两侧驱动轮转矩之差以及内外侧驱动轮转矩和,分别如图4~6所示。
图4 转矩分配比K(v,δ)模型
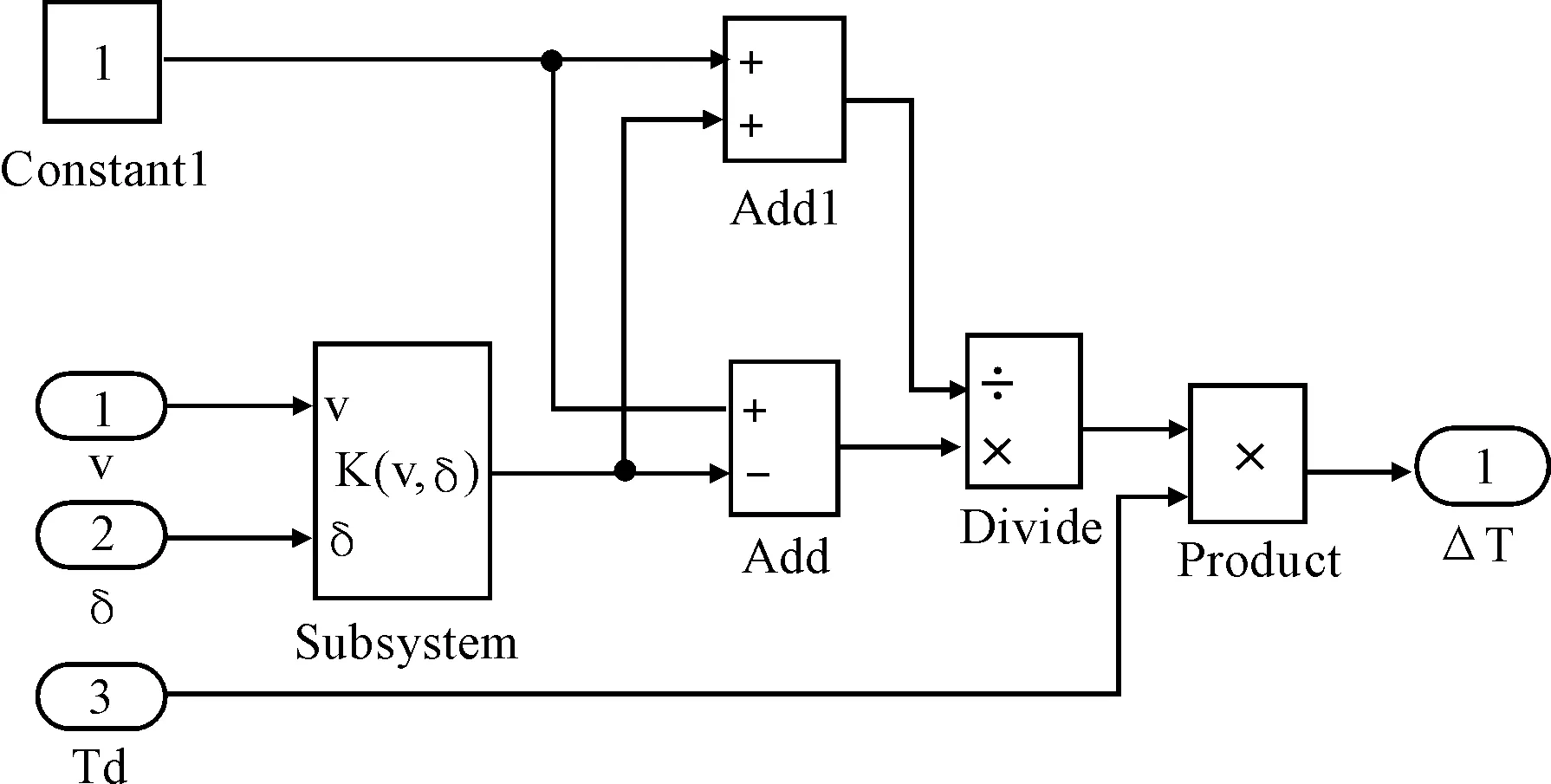
图5 两侧驱动轮转矩差值模型

图6 两侧驱动轮转矩模型
2.2 轮毂电机控制
2.2.1 轮毂电机控制方法的确定
基于电机转速控制也称电机调速控制,是电机控制中常用的一种控制技术,通常有弱磁调速和电压调速等控制方法。该控制技术主要基于电子差速原理,根据电机反馈转速信号和输入转速指令间的误差,采用PI或PID调速方法进行闭环控制[15]。但是,由于车辆系统的非线性以及恶劣的行驶工况,在理论目标车轮转速与实际车轮转速间存在误差,就会使得驱动轮发生滑转或滑移,从而达不到理想的控制效果。
本文采用基于电机的转矩控制方法,通过电流控制电机转矩,再采用PI控制的电流调节器,使电机电流和输出转矩得到调节,从而实现电机转矩的闭环控制。
2.2.2 轮毂电机数学模型
电动轮汽车车用轮毂电机不仅要满足一般电气传动系统的共性,还应具有启动转矩大、调速范围广、体积小、质量轻、结构简单、效率高等特点。轮毂电机与传统发动机不同,所以电机的机械特性应该是在低速时采用恒转矩模式,中高速时采用恒功率模式。
基于以上分析,选用永磁无刷直流电机作为电动轮汽车车用轮毂电机。永磁无刷直流电机取消了传统有刷电机的电刷机构,工作性能大幅度提升,具备结构简单可靠、适用性强、过载能力强、效率高等优点。永磁无刷直流电机的外特性是:在电机额定转速以下可以实现恒转矩特性;在额定转速以上,由于电机需要进行弱磁控制,电机的机械输出是恒功率的,电机的输出转矩随着转速升高而减小[16]。永磁无刷直流电机的力学特性可表示为:
(21)
式中:Tmax为电机的最大输出转矩;Pmax为电机的最大输出功率;n0为电机的额定转速;v为车轮车速;r为车轮滚动半径。 选用的永磁无刷直流电机参数如表1所示。
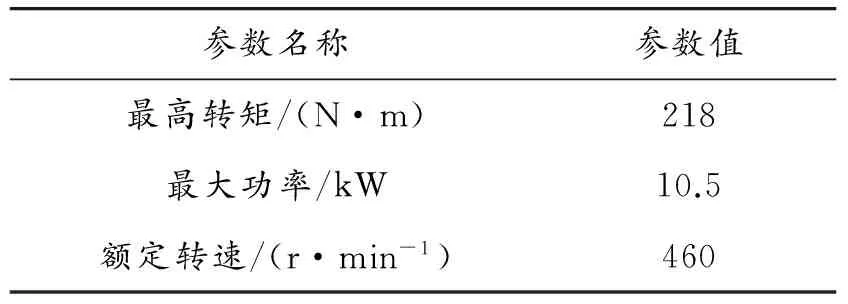
表1 永磁无刷直流电机参数
根据以上参数,用Simulink定义出永磁无刷直流电机的转矩外特性曲线,作为电动轮汽车的驱动系统模型,如图7所示。
2.3 动力学建模
采用动力学仿真软件CarSim建立整车动力学模型,主要对软件中的汽车各部件参数设置、运行工况及仿真环境条件设置。本研究对桑塔纳2000进行改装,改装后的后轮毂电机独立驱动电动轮汽车的主要整车参数如表2所示。
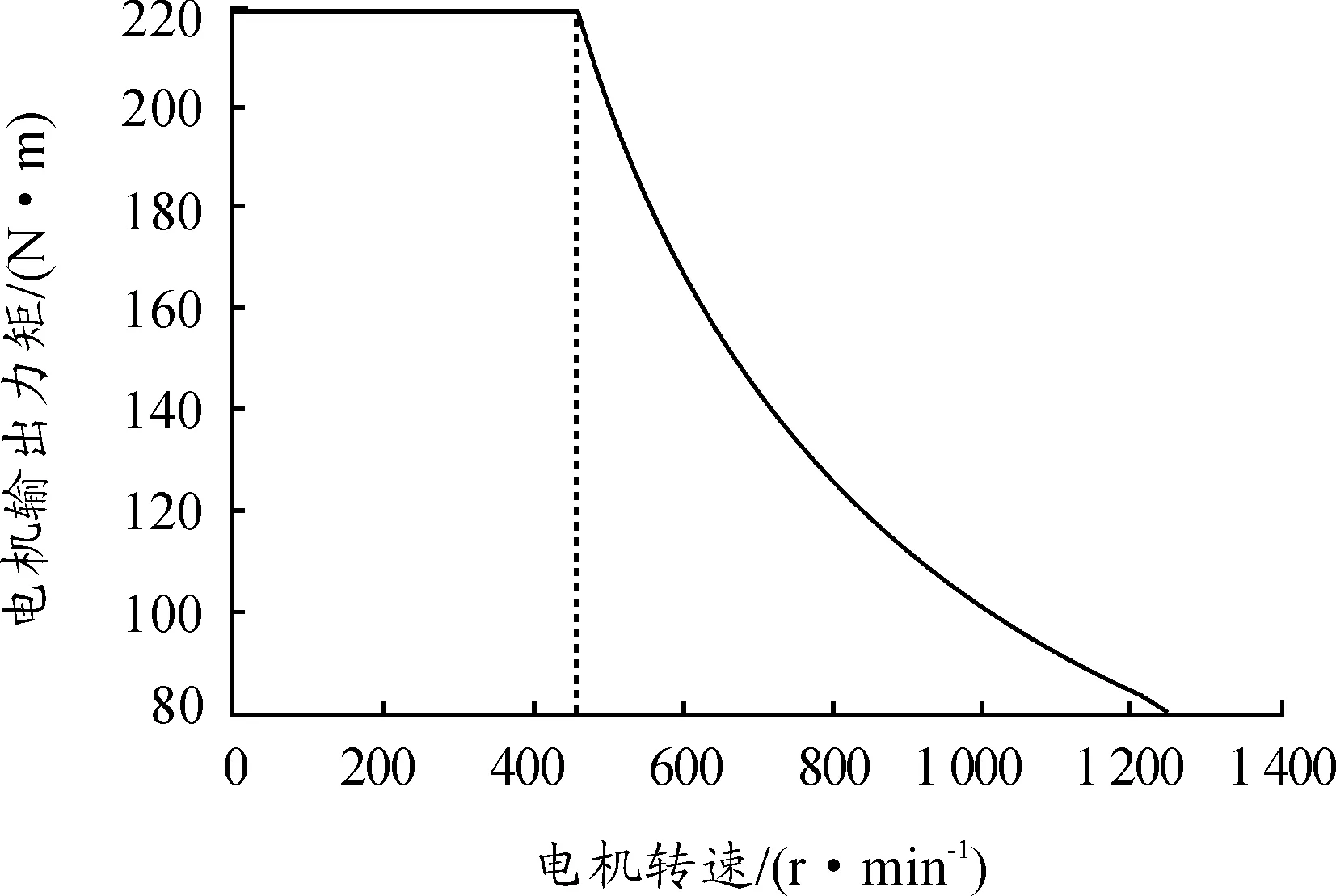
图7 轮毂电机转矩外特性曲线

参数名称数值长、宽、高/mm4680、1780、1423轴距/mm2656前、后轮距/mm1414、1422质心高度/mm540质心到前、后轴距离/mm1300、1356绕Z轴转动惯量/(kg·m2)1310轮胎型号185/65R14车轮半径/mm278整备质量/kg1080
3 仿真与试验分析
3.1 基于阿克曼转向模型的转矩分配策略仿真
建立Carsim/Simulink联合仿真模型,如图8所示。输入驾驶员期望的驱动总转矩、车速v和方向盘转角,由Carsim输出接口输出,并接入转矩分配控制模块,输出左右驱动轮转矩。由电机模块经Carsim接口输入左右驱动轮转矩和,同时通过Carsim车辆模型输出接口采集实时的车辆状态参数。

图8 Carsim/Simulink联合仿真模型
对后轮毂电机独立驱动电动轮汽车进行低速下方向盘角阶跃输入仿真。首先,设置仿真工况为:电动汽车在水平路面上以20 km/h匀速直线行驶。在某一时刻(记)接受方向盘转角的转向信号(如图9所示),得到左右驱动轮转矩、转速。在CarSim的仿真设置模块中设置驾驶员模型及道路模型,仿真结果如图10~14所示。
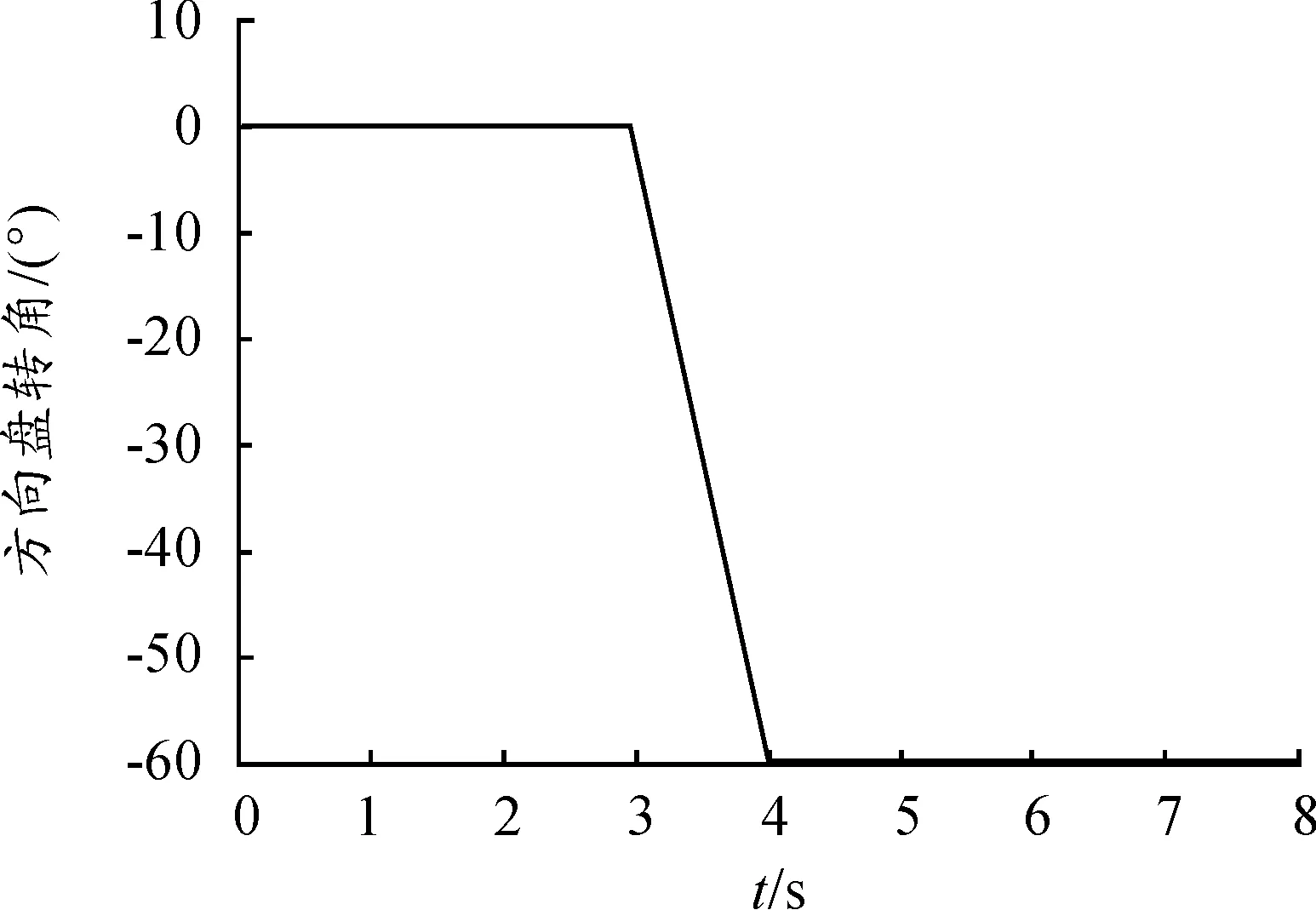
图9 角阶跃输入方向盘转角
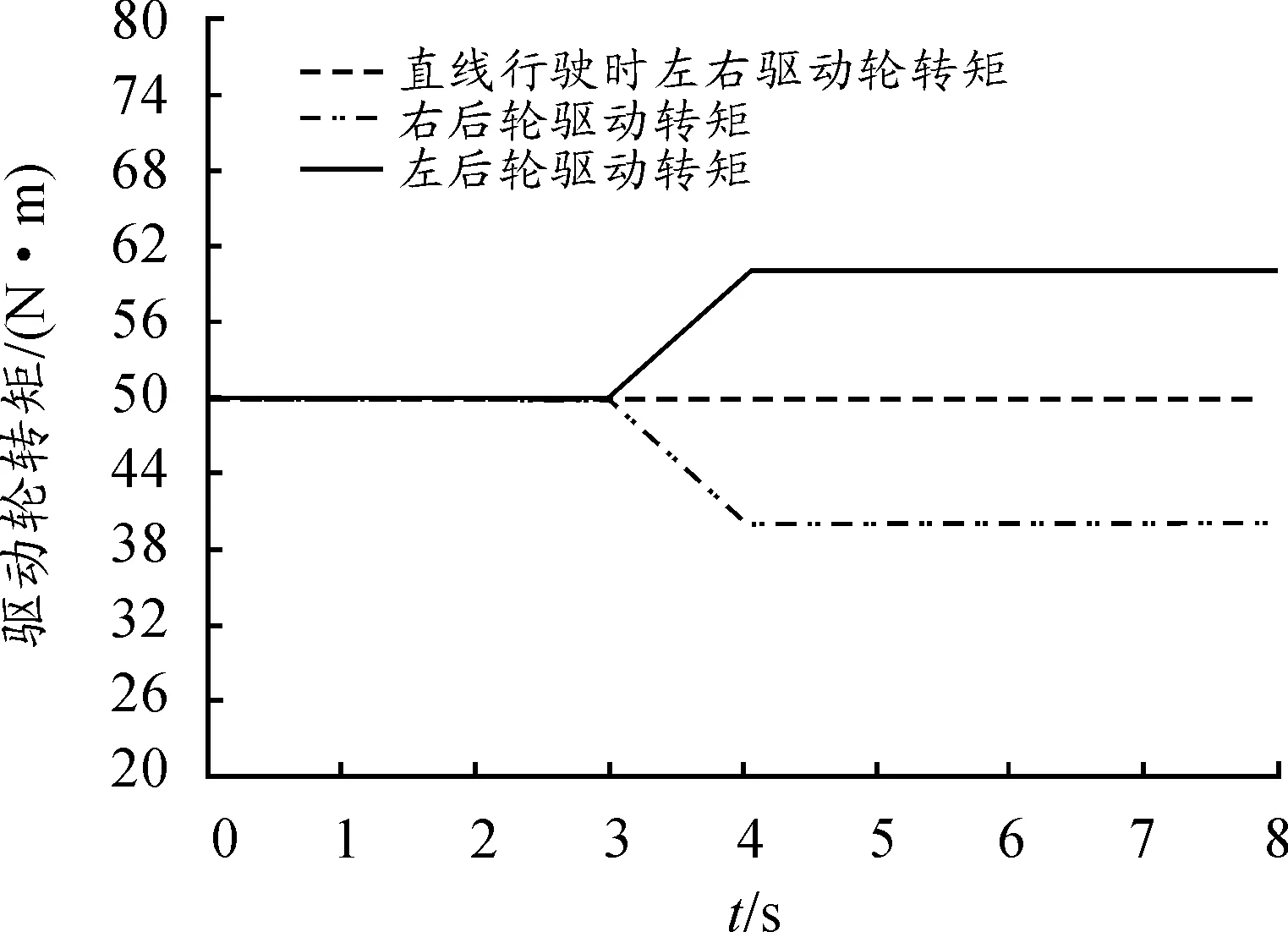
图10 驱动轮转矩

图11 驱动轮转速
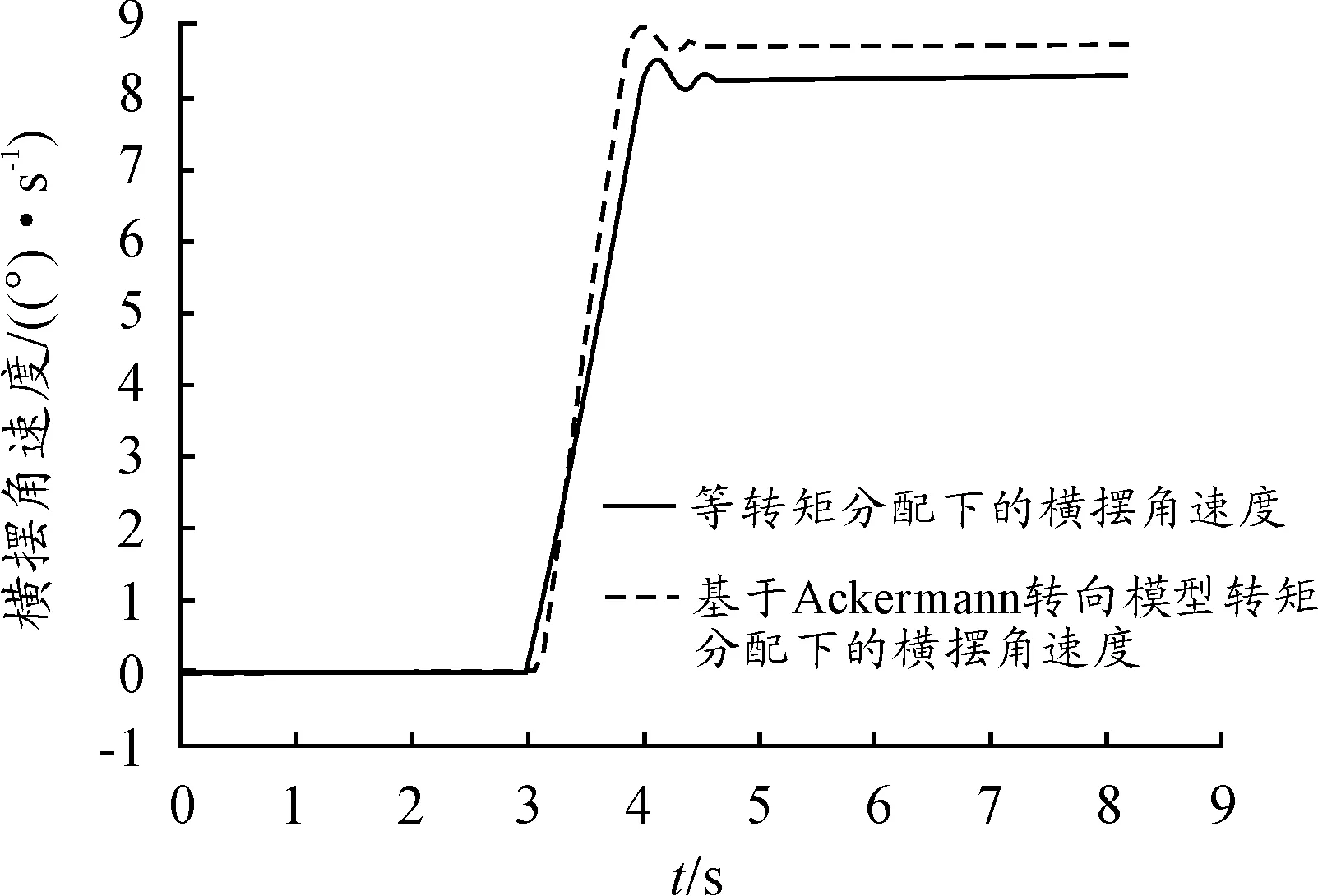
图12 横摆角速度

图13 质心侧偏角

图14 行车轨迹
由图10可知:当t=3 s时,由于车辆向左转向,右侧驱动轮转矩由50 N·m增加至59 N·m,左侧驱动轮转矩则由50 N·m减小至41 N·m,实现了转矩分配。在转矩分配下左右侧驱动轮产生一定的差速效果,右侧驱动轮轮速增加到约21.5 km/h,左侧驱动轮轮速减小到约18.7 km/h,车速维持在20 km/h左右,如图11所示。可见基于阿克曼转向模型的转矩分配策略实现了基本的差速功能。 由图12和图13可知:在驱动轮转矩控制下,车辆横摆角速度比等转矩分配下响应更快,并且峰值增大约0.7 °/s,质心侧偏角相对减小约0.14°,说明车辆的转向响应速度提高。车辆的行驶轨迹如图14所示,说明车辆转向半径减小,提高了车辆稳态转向时的机动性。综上可看出:基于阿克曼转向模型的转矩分配策略不仅实现了基本的差速功能,对车辆转向行驶也有一定辅助作用。
3.2 实车试验
实车试验是验证控制策略、软硬件设计以及结构布置有效性和精确性的重要手段。本研究将桑塔纳2000车型改装为后轮毂电机驱动汽车,对原有车辆的动力系统、传动系统以及驱动力控制系统进行改装,保留原有的转向系统、制动系统和悬架等。首先将前舱的发动机和前置驱动系统改为后轮毂电机驱动形式,并将动力电池布置于后备箱中,同时对驾驶舱控制面板进行改装(见图15)。
本试验在项目合作企业的试验场进行,主要测试试验车辆的基本差速控制效果。设置试验工况为:汽车直线加速行驶至车速为20 km/h,并匀速行驶,在时间t=3 s时,驾驶员在1 s时间内向左打方向盘60°(如图16所示),保持电子油门开度不变,进行稳态转向行驶,最终获得车轮转矩、转速随时间变化曲线,如图17和图18所示。

图15 试验车辆

图16 方向盘转角
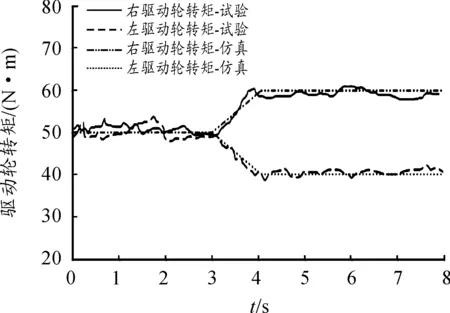
图17 左右驱动轮转矩

图18 左右驱动轮转速
由以上试验与仿真对比结果可以看出:在驾驶员操控方向盘的过程中存在一定的误差,较难实现对方向盘转角的精确控制,但总体跟随了方向盘目标转角。在车速稳定在20 km/h附近进入稳态转向行驶后,左右驱动轮转矩和转速与仿真结果存在一定误差,但其值的变化基本上保持一致,实现了基本的差速和差矩功能,并为将来进一步基于电子差速控制的辅助转向研究和车辆稳定性控制研究提供实车试验参考。
4 结束语
从电子差速原理出发,在Ackermann-Jeantand转向模型基础上,对电动轮汽车的动力学和运动学进行分析,说明电子差速控制方法对电动轮汽车辅助转向的影响。利用阿克曼转向模型结构简单和响应快等特点,对驱动轮转矩进行控制,建立Carsim整车动力学模型,并用Simulink建立模糊控制器模型,最终对基于阿克曼转向模型的转矩分配策略进行联合仿真。结果表明:该控制方法不仅实现了基本的差速功能,对车辆转向行驶也有一定辅助作用。改装了后轮驱动电动轮汽车,并进行电子差速控制实车试验。结果表明:控制策略能较好地应用于试验车辆,为今后的控制策略研究提供实车试验参考。
[1] 靳立强,王庆年,张缓缓,等.电动轮驱动电动汽车差速技术研究[J].汽车工程,2007,29(8):700-704.
[2] 黄锡超,江洪,徐兴.四轮独立驱动电动汽车直线行驶稳定协调控制[J].重庆理工大学学报(自然科学),2016,30(6):17-25.
[3] 陈宁,黄会明,吴汶芪.基于模糊控制的电动汽车电子差速设计[J].客车技术与研究,2013(3):5-7.
[4] 殷国栋,金贤建,张云.分布式驱动电动汽车底盘动力学控制研究综述[J].重庆理工大学学报(自然科学),2016,30(8):13-19.
[5] 葛英辉,倪光正.新的轮式驱动电动车电子差速控制算法的研究[J].汽车工程,2005,27(3):340-343.
[6] 王强,王耘,宋小文.基于差动驱动的电子差速控制方法研究[J].机电工程,2011,28(6):698-703.
[7] CHAN C C.The state of the art of electric and hybrid vehicles[J].Proceeding of IEEE,2002,90(2):1-29.
[8] LEE Jusang, RYOO Youngjae, LIM Youngcheol,et al.Neural network model of electric differential system for electer vehicle[C]//26th Annual Conference of the IEEE.2000:83-87.
[9] 褚文强, 辜承林.电动车用轮毂电机研究现状与发展趋势[J].电机与控制应用,2007,34(4):1-5.
[10]翟丽,董守全,罗开宇.四轮毂电机独立驱动车辆转向电子差速控制[J].北京理工大学学报,2010,30(8):901-905.
[11]靳彪,张欣,杨庆保.纯电动汽车低速转向差速控制模型[J].北京交通大学学报,2013,37(4):158-161.
[12]鲍晓华,吕强.感应电机气隙偏心故障研究综述及展望[J].中国电机工程学报,2013,33(6):93-100.
[13]王春燕,赵万忠,赵婷,等.电动轮汽车差速助力转向系统路感优化[J].中国机械工程,2012,23(1):126-129.
[14]FARZAD Tahami,SHAHROKH Farhangi ,REZA Kazemi.A fuzzy logic direct yaw-moment control system for all-wheel-drive electric vehicle[J].Vehicle System Dynamics,2004,41(3):203-221.
[15]MOTOKI S ,PONGSATHORN R ,MINORU K.Independent wheel torque control of small-scale electric vehicle for handling and stability improvement[J].JSAE Review,2003,24:449-456.
[16]LEE J,RYOO Y.A neural network model of electric differential system for electric vehicle[C]//2000 International Conference on Industrial Electronics,Control and Instrumentation (IECON 2000).2000:83-88.
(责任编辑 刘 舸)
Low-Speed Electronic Differential Control Integrating the Function of Assisted Steering for In-wheel Motor Drive Vehicle
ZHANG Houzhonga, SU Jianb, ZHANG Yongb
(a.Automotive Engineering Research Institute; b.School of Automotive and Traffic Engineering, Jiangsu University, Zhenjiang 212013, China)
For rear-wheel independent drive electric car steering wheel differential control technology, based on the low-speed electric car steering wheel features, it established the Ackermann steering differential model. Considering supporting role of electronic differential control on the vehicle steering, electric steering wheel car at low speed when taking into account the auxiliary steering electronic differential control is studied. Simulation results show that Ackerman steering torque distribution based policy model not only achieves the basic differential function of the vehicle with the steering, it also has a supporting role; it performed electronic differential control real vehicle test results to verify the control strategy. And it can be better used in the test vehicle.
wheel electric car;Ackermann steering model;differential;assisted steering
2016-12-03 基金项目:国家自然科学基金青年基金资助项目(51305167);江苏省高校自然科学研究面上项目(14KJD580001);江苏大学校基金资助项目(13JDG034);江苏省电动车辆驱动与智能控制重点实验室开放研究课题JLDICEV20150703)
张厚忠(1978—),男,博士,讲师,主要从事新能源汽车的电机与电控研究,E-mail:ujs_aeri_motor@163.com。
张厚忠,苏健,张勇.电动汽车低速转向电子差速兼顾辅助转向控制[J].重庆理工大学学报(自然科学),2017(8):14-21.
format:ZHANG Houzhong, SU Jian, ZHANG Yong.Low-Speed Electronic Differential Control Integrating the Function of Assisted Steering for In-wheel Motor Drive Vehicle[J].Journal of Chongqing University of Technology(Natural Science),2017(8):14-21.
10.3969/j.issn.1674-8425(z).2017.08.003
U469.72;U463.4.02
A
1674-8425(2017)08-0014-08
猜你喜欢
防爆电机(2022年2期)2022-04-26
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
昆明医科大学学报(2022年1期)2022-02-28
中国新技术新产品(2020年4期)2020-05-05
科技创新导报(2016年27期)2017-03-14
通信电源技术(2016年1期)2016-04-16
微特电机(2015年1期)2015-07-09
中国塑料(2014年12期)2014-10-17
小品文选刊(2009年19期)2009-11-26
