双曲率后视镜的优化设计
2017-09-17 03:19郑芙
科学与财富 2017年25期
关键词:优化设计
郑芙

摘要:汽车后视镜是保证行车安全的重要部件。目前,国内外汽车的后视镜多为平面镜、凸面镜或双曲率后视镜。平面镜图像没有畸变,但视野不足,存在盲区。为扩大视野,采用凸面镜,但图像严重扭曲失真,致使驾驶员无法准确判断后侧方道路情况。因此,采用大视野、低失真的双曲率后视镜能大大提高安全性,对降低交通事故的发生率、减少人民的生命以及财产损失具有重要意义。
本文针对现有的双曲率后视镜进行优化设计,根据平面镜及凸面镜成像原理、几何光学原理等建立了视野能见宽度模型、垂直放大率模型用以确定双曲率后视镜的视野范围和畸变程度,并运用模拟退火算法求解,可以得到双曲率后视镜的优化设计。
关键词:双曲率后视镜;优化设计;物像位置关系
1双曲率后视镜的视野范围
为简化问题,将双目等效成单目,且假设平面镜与凸面镜光滑连接。R为凸面镜的曲率半径,β为垂直放大率,l_M为双曲率后视镜的水平总长度,l_R为双曲率后视镜中凸面镜的水平长度,θ为双曲率后视镜中凸面镜的圆心角。
双曲率后视镜镜面的曲面外形如图1:
图1双曲率后视镜镜面的曲面外形
根据几何光学,双曲率后视镜的成像示意图如图2 [1]:
图2双曲率后视镜成像原理图
点A、B为双曲率后视镜中平面镜的右、左边界点,点C为人眼位置,点D为过点B作凸面镜曲率半径的垂线的垂足点,点E为平面镜与凸面镜相交处的切点,点O'为凸面镜圆心,直线l_0为马路边缘。设点A、B、C、E、O'的坐标分别为(a,0),(0,b),(c,d),(xE,yE),(xO' ,yO' )。
点A、B与点O'之间的距离分别为:
(1)
(2)
点A与E,点E与O^'的距离分别为:
(3)
(4)
点C' (xC'),yC')为关于过点B的切线l_0的对称点,由|BC'|=|BC|及lCC^',可得:
(5)
(6)
运用MATLAB求解,可得点O'的坐标(xO',yO' ))、点E的坐标(xE,yE)及点C'的坐标(xC' ),yC' )。
由此可得,直線BC'的方程为:
(7)
点C'' (xC''),yC'' ))为关于直线AE的对称点,由|AC'' |=|AC|及AE⊥CC'',可得:
(8)
(9)
联立式(8)、(9),运用MATLAB求解,可得点C''的坐标(xC'' ),yC^'' )。
由此可得,直线AC^''的方程为:
(10)
直线AC''、BC'与直线y=10m的交点分别记为N、M,则点N、M的横坐标N(x_N,y_N)、M(x_M,y_M ),则点N与M之间的距离|MN|,即双曲率后视镜的视野能见宽度,也即视野范围为:
(11)
2 双曲率后视镜的畸变程度
为了对畸变程度进行分析,选取垂直放大率β量化畸变。垂直放大率是用来描述物体成像前后高度间的关系,即为像的大小与物的大小之比。出现畸变主要是由于物体成像前后高度存在偏差。而这一偏差是由视野增大所导致的,故选取垂直放大率量化畸变是合理可行的。
根据几何光学,凸面镜的成像示意图如图3 [1]:
图3 凸面镜成像示意图
1.凸面镜物像位置公式
规定[2]:以折射面顶点"O" 为原点;沿着光线的传播方向自左向右为正方向,故与光线传播方向相同时取正值,相反时则取负值;以光轴为基准,在光轴以上为正,则在光轴以下为负。
单个折射球面的物像位置关系为[2]: (12)
式中:n,n'——物方和像方的折射率;l,l'——物方和像方的截距。
反射定律可看成折射定律的特殊情况,令n'=-n可得凸面镜的物像位置公式为:
(13)
2.凸面镜成像规律的推导
垂直放大率为像的大小与物的大小之比,即:
(14)
对于凸面镜,图3中△A' B' C~△ABC,故可得:
(15)
又因为:
(16)
式中:Q——阿贝不变量[2]。
则由式(12)可得:
(17)
又因为: (18)
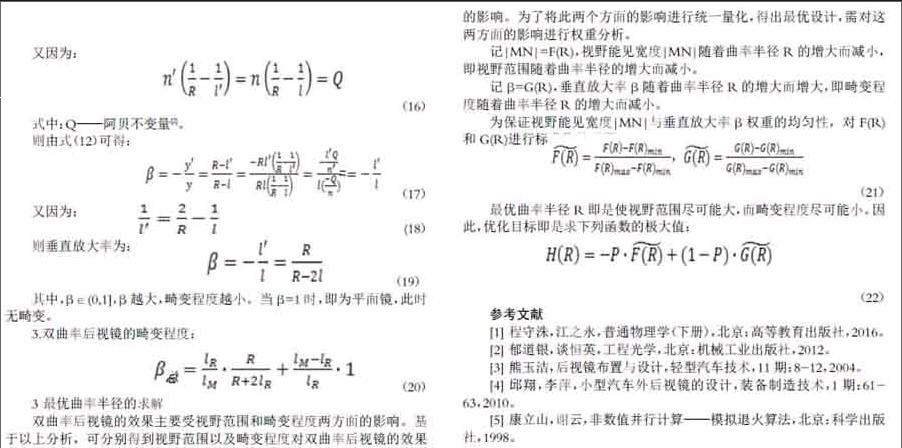
则垂直放大率为:
(19)
其中,β∈(0,1],β越大,畸变程度越小。当β=1时,即为平面镜,此时无畸变。
3.双曲率后视镜的畸变程度:
(20)
3 最优曲率半径的求解
双曲率后视镜的效果主要受视野范围和畸变程度两方面的影响。基于以上分析,可分别得到视野范围以及畸变程度对双曲率后视镜的效果的影响。为了将此两个方面的影响进行统一量化,得出最优设计,需对这两方面的影响进行权重分析。
记|MN|=F(R),视野能见宽度|MN|随着曲率半径R的增大而减小,即视野范围随着曲率半径的增大而减小。
记β=G(R),垂直放大率β随着曲率半径R的增大而增大,即畸变程度随着曲率半径R的增大而减小。
为保证视野能见宽度|MN|与垂直放大率β权重的均匀性,对F(R)和G(R)进行标准化处理得:
(21)
最优曲率半径R即是使视野范围尽可能大,而畸变程度尽可能小。因此,优化目标即是求下列函数的极大值:
(22)
参考文献
[1] 程守洙,江之永,普通物理学(下册),北京:高等教育出版社,2016。
[2] 郁道银,谈恒英,工程光学,北京:机械工业出版社,2012。
[3] 熊玉洁,后视镜布置与设计,轻型汽车技术,11期:8-12,2004。
[4] 邱翔,李萍,小型汽车外后视镜的设计,装备制造技术,1期:61-63,2010。
[5] 康立山,谢云,非数值并行计算——模拟退火算法,北京:科学出版社,1998。
猜你喜欢
航空兵器(2016年4期)2016-11-28
科技资讯(2016年19期)2016-11-15
电脑知识与技术(2016年24期)2016-11-14
文理导航(2016年30期)2016-11-12
科技视界(2016年22期)2016-10-18
科技视界(2016年21期)2016-10-17