智能移动平台融合定位技术综述
2017-09-20 06:02,,,
导航定位与授时 2017年5期
,, ,
(1.上海交通大学,上海市北斗导航与位置服务重点实验室,上海200240;2.上海华测导航技术股份有限公司,上海201702)
智能移动平台融合定位技术综述
裴凌1,刘东辉1,龚正1,赵毅2
(1.上海交通大学,上海市北斗导航与位置服务重点实验室,上海200240;2.上海华测导航技术股份有限公司,上海201702)
近年来,随着基于位置服务需求的日益增大,产生了多种针对不同场景的定位方案。但由于定位场景多样且复杂,单一定位手段无法满足多种场景的不同定位需求。同时随着硬件技术的进步,出现了多种不同形式的智能移动平台,可以搭载更多不同类型的传感器,使得基于智能移动平台的多传感器融合定位成为了可能。首先对目前的智能移动平台及其相关的定位技术进行详细介绍,然后对目前主流的融合定位方案进行对比和分析,最后对融合定位技术进行总结。
基于位置服务;智能移动平台;融合定位
0 引言
近几年室内定位技术发展迅速,但仍然没有一种像星基导航系统提供室外定位一样能够用单一技术解决复杂场景定位问题的整体方案。而全球卫星定位系统在室内环境中又无法精确定位。实际上,大多数技术至少在理论上可以在室内外应用。但由于不同环境有很多实质的差异,单一技术的实际可用性并不十分理想。于是,基于信息融合技术的多源融合定位技术成为解决复杂场景高可用、高可信定位问题的可行方案。
相对于传统的单一定位技术,融合定位可以充分利用每一个定位源的优势,从而提供最好的定位与导航结果。2011年11月,美国国防部高级研究计划局(Defense Advanced Research Projects Agency, DARPA)首次提出全源导航(All Source Positioning and Navigation, ASPN)的概念[1]。美国的全源导航是针对美军在地下、水下、室内、城市、高山峡谷、GPS受阻等复杂场景下的导航定位问题而提出的。在我国,上海交通大学、国防科技大学等团队也开展了全源融合定位导航终端技术的研究。而随着移动平台制造工艺的发展,移动平台变得越来越强大,可以搭载多种多样的传感器,计算能力也突飞猛进。因此,充分利用智能移动平台的传感器资源与计算能力,实现基于移动平台的融合定位也成为目前定位研究的主流方向。
本文首先介绍了目前主流的智能移动平台的软件和硬件基础,并对可在智能移动平台应用的定位技术进行阐述。然后对目前的融合定位方式进行分类介绍,最后对融合定位技术进行性能评估和简要总结。
1 智能移动平台介绍
智能移动平台(以下简称为移动平台),也可称为移动终端,即小型可计算设备,通常可在手中操作并且拥有操作系统,可以运行移动应用并实现多种功能,例如现在几乎人手一部的智能手机、移动平板等。智能移动平台通常具备四大特征:一是高速接入网络的能力;二是开放可扩展的操作系统平台;三是较强的计算处理能力;四是丰富的人机交互方式。本节主要对目前主流的移动平台形式进行介绍。
1.1 操作系统介绍
智能移动平台均搭载操作系统,以运行对应形式的移动应用程序,并完成相应的功能。下面将对目前主要的移动操作系统进行介绍。
1.1.1 Android
Android是一种基于Linux的自由及开放源代码的操作系统,主要适用于移动设备,如智能手机和平板电脑。Android操作系统最初由Andy Rubin开发,主要支持手机,在2005年8月被Google收购后逐渐发展壮大。得益于其开放性,Android操作系统被诸多移动终端制造商采用并推广。在2017年4月3日互联网分析公司Stat Counter发布的报告中,Android已超越Windows成为消费者接入互联网使用最广泛的操作系统[2]。
在优势方面,Android平台的开放性允许任何移动终端制造商加入到Android联盟中来,继而可以适配多种各具特色的功能模块,也易于开发者进行开发改进。
其他以Linux为基础的操作系统因为普及不足且与Android类似,本文从略。
1.1.2 iOS
iOS是由美国苹果公司开发的移动操作系统。苹果公司最早于2007年1月9日的Macworld大会上公布这个系统,属于类Unix的商业操作系统。最初是设计给iPhone使用的,后来陆续套用到iPod touch、iPad以及AppleTV等产品上。由于苹果公司同时制造iPad、iPhone、iPod touch的硬件和软件系统,这种高度整合使应用程序得以充分利用硬件资源。iOS系统的高安全性和易用性使得其迅速占领移动终端市场,并与Android一起拿下智能手机市场99.6%的份额[3]。
1.1.3 Windows
Windows Mobile(WM) 是微软公司针对移动设备而开发的操作系统。该操作系统的设计初衷是尽量接近于桌面版本的Windows。微软按照电脑操作系统的模式来设计WM,以便实现Windows跨平台操作的效果。WM的应用软件以MicrosoftWin32API为基础。
Windows Phone(WP)是微软于2010年10月发布的手机操作系统,同时停止对WM的技术支持。至2015年初,因为诸多原因,WP的市场份额远远不及Android和iOS。因此微软在Windows10发布会上提出将Windows 10打造成一个跨平台的系统,WP正式终结,被统一命名的Windows10所取代。
Windows10Mobile即为微软最新Windows10手机操作系统的名称。硬件方面,处理器可以兼容包括高通骁龙210、410、615、808以及810在内的处理器,也能兼容IntelX3SofiaLTE这样的x86架构处理器。对不同平台的低端移动终端具有良好的兼容性,也更具发展优势。
Windows10Holographic是为微软发布的增强现实(Augmented Reality, AR)头戴式显示器设备HoloLens定制的操作系统。下一节会对头戴式显示器作介绍。
1.2 移动平台形式
随着硬件制造工艺的发展进步,移动平台的形式也多种多样,下面将对目前常见的移动平台形式分别进行介绍。
1.2.1 智能手机
智能手机,是指像个人电脑一样,具有独立的操作系统,独立的运行空间,可以由用户自行安装第三方服务商提供的程序,并可以通过移动通信网络来实现无线网络接入的手机类型总称。
随着技术的进步,手机已经不再是一个简单的通信工具,而是具有综合功能的便携式电子设备。手机与现实结合的功能,如拍照、重力感应游戏、健康监测等,都是通过传感器来实现。如今智能手机几乎人手一部,而主流的传感器如光线传感器、加速度计、陀螺仪、磁场传感器、全球卫星定位系统、气压计等都成为了智能手机的标配,使得智能手机成为实现普适定位最便捷的平台。
1.2.2 平板电脑
平板电脑也叫便携式电脑,是一种小型、方便携带的个人电脑,以触摸屏作为基本的输入设备。平板电脑分为ARM架构(代表产品为iPad)和x86架构(代表产品为Surface Pro)。后者一般采用Intel处理器及Windows操作系统,具有完整的电脑及平板功能,支持.exe应用程序。平板电脑比笔记本电脑更小更轻便,可以随时转移它的使用场所。同时基于ARM架构的平板电脑可以搭载Android操作系统,开放平台使其可以搭载如智能手机一样的传感器。平板电脑已经越来越多地进入普通家庭,使用平板电脑进行融合定位也成为一种可行选项。
1.2.3 智能手表/智能手环
智能手表和智能手环形态、功能类似,且都佩戴在手腕处,因此在本小节作统一介绍。
智能手表是具有信息处理能力,符合手表基本技术要求的手表。除指示时间外,还具有提醒、导航、校准、监测、交互等其中一种或多种功能。
智能手环是一种穿戴式智能设备。用户将智能手环戴在手腕处,以完成一些特定功能如记录日常生活中的锻炼、睡眠等实时生活数据。
两者都搭载了基本的传感器如加速度计、陀螺仪以完成人机交互,并且多数智能手环内置低功耗蓝牙模块,可以与手机、平板电脑、个人电脑进行连接和通信。同时随着制造工艺的进步,未来会有更多更先进的传感器加入到智能手表和智能手环中。因此两者均可以成为融合定位的实现平台。
1.2.4 头戴式显示器
随着虚拟现实(Virtual Reality,VR)、AR和混合现实(Mixed Reality,MR)的兴起,多种头戴式显示设备得以出现。通过各种头戴式显示设备,用不同方法向眼睛发送光学信号,以完成相应的功能。
VR头显利用电脑技术模拟出一个立体、高度逼真的三维空间,代表设备有HTCVive、Oculus Rift、PlayStationVR。因为要模拟真实三维场景,所以VR头显都搭载了加速度计、陀螺仪和磁力计来完成头部运动追踪功能。而在上述三种代表设备上还安有LED或是激光传感器以降低信号延迟。
AR头显是将虚拟的信息应用到真实世界,真实的环境与虚拟的物体实时地叠加到同一个画面或时空同时存在。代表设备有Google Project Glass。它是Google公司于2012年4月发布的一款智能眼镜,具有和智能手机一样的功能,可以通过声音控制拍照、视频通话,也可以根据环境声音在屏幕上显示距离和方向,在两块目镜上分别显示地图和导航信息。
MR头显是通过电脑技术,将现实世界与虚拟世界合并在一起,从而建立一个新环境,以及符合一般视觉上所认知的虚拟影像,在这之中现实世界的物体可以与虚拟世界中的物体共存并即时产生互动。代表设备有微软的HoloLens,包括4个环境传感器、Kinect微型深度相机以及惯性测量单元(Inertial Measurement Unit, IMU),用于追踪头部动作以及控制显示器的手势。
1.2.5 其他穿戴式设备
除去以上介绍的智能移动平台,目前还有许多不同形式的穿戴式设备,例如美国苹果公司新推出的AirPods无线耳机,装有射频识别(Radio Frequency Identification,RFID)、蓝牙模块的公司员工证等。这些设备搭载的传感器可能并没有上述介绍的移动平台多,但也可以用于单一定位方案的实现。在科技进步的未来,相信可以实现基于更多穿戴式设备的定位方案。
1.3 内嵌传感器介绍
因为微机电系统制造工艺的突飞猛进,传感器的体积从一个行李箱大小缩小到不足一个硬币,也使得移动平台能够搭载多种多样的传感器。下面将对目前主流搭载的传感器分别进行简要介绍。
1.3.1 加速度计
加速度计是利用压电效应,通过三个维度确定加速度方向,主要用于步态监测、手机摆放位置朝向角度计算。移动平台常用的加速度计有BOSCH的BMC系列[4]、InvenSense的ICM系列[5]和ST的LIS3X系列[6]。这些传感器一般提供±2~±16G的加速度测量范围,采用I2C或SPI接口和MCU相连,数据精度小于16bit。
1.3.2 陀螺仪
目前的陀螺仪主要分为激光陀螺仪和微机电陀螺仪。激光陀螺仪通过光传播的特性,测量光程差计算出旋转的角速度以完成陀螺仪的功能;微机电陀螺仪则是利用科里奥利力,在内部产生微小的电容变化,然后计算得到角速度。因为微机电发展迅速且成本越来越低,目前普及的移动平台所采用的均是微机电陀螺仪。主要用于检测手机姿态、与加速度计结合实现惯性导航。
1.3.3 磁力计
磁力计由各向异性的磁质电阻材料组成,感受到磁场变化后会导致自身电阻产生变化,从而检测地磁场强度。主要用于导航定位的航向估计。
1.3.4 气压计
气压计分为变容式或变阻式气压传感器,将薄膜与变阻器或电容连接起来,气压变化导致电阻或电容的数值发生变化,从而计算得到气压数据。因为GPS计算海拔会有10m左右的误差,气压计主要用于修正海拔误差,当然也能用来辅助GPS定位立交桥或楼层位置。
1.3.5 图像传感器
图像传感器是数字摄像头的重要组成部分。根据元件不同,可以分为电荷耦合元件(Charge Coupled Device, CCD)和金属氧化物半导体元件(Complementary Metal-Oxide Semiconductor,CMOS)两大类。相比采用CCD图像传感器的相机,采用CMOS图像传感器的相机体积更小,功耗更低,速度更快。此外CMOS也可以实现一些高级功能,如硬件集成的图像处理功能。随着CMOS传感器不断改进,CCD传感器已经不再具有优势,而目前的智能手机和平板电脑几乎全部使用CMOS传感器。使用移动终端搭载的图像传感器,可以便捷地实现基于图像识别的定位技术。
1.3.6 光线传感器
在几十年前,人们就开始利用光敏电阻和光电二极管来实现对环境光的检测。随着人们对产品智能化的关注,光线传感器得到了越来越多的运用。目前光线传感器在移动终端上的应用主要是辅助调节液晶显示器的亮度。在定位中可以用于室内外环境的识别。
1.3.7 其他传感器
严格地讲,GNSS接收器、蓝牙模块、WLAN模块应该算作通信模块,但也符合“传感”的定义,此处为文章行文统一放在一起。
GNSS接收器是用于接收不同卫星定位信号的模块。蓝牙模块采用蓝牙4.0标准中的低功耗蓝牙(Bluetooth Low Energy, BLE),可以实现超低的平均功耗,使用标准纽扣电池可运行一年乃至数年。得益于低功耗蓝牙技术,基于蓝牙的室内定位方案得到发展。WLAN模块是扫描WiFi基站信号,通过射频技术进行通信。目前主流推广的室内定位方案多是基于WLAN的指纹定位或基于接收信号强度的邻近检测定位。
移动平台还搭载了很多实现不同功能的传感器如温度传感器、指纹传感器、心率传感器等,但因与本文内容关系不大,限于篇幅限制,此处从略。
2 移动平台的定位技术
根据上文介绍的传感器进行分类,对应的定位技术主要有:GNSS定位、WLAN定位、基站定位、RFID、蓝牙定位、视觉定位等。下面对其中主流的适合在移动端应用的定位技术作详细介绍。
2.1 GNSS定位
GNSS定位也称为卫星定位,就是使用卫星对指定物体进行准确定位的技术。可以保证在任意时刻,地球上任意一点同时观测到至少4颗卫星,以实现导航、定位、授时等功能,可在绝大多数场景下实现全天候全天时的定位。目前移动设备如智能手机、平板电脑绝大多数装有GNSS信号接收机,均可利用卫星定位满足一般场景下的定位需求。但因为卫星信号在一些复杂场景如室内、城市峡谷等会受到干扰,定位精度下降,因此需要其他定位技术进行辅助。
2.2 WLAN定位
基于IEEE802.11b标准的无线局域网已在人们的生活场所大量部署,使用WLAN信号定位的优势在于不需要部署额外设备,定位成本低,信号覆盖范围大,适用性强,利于普及推广[7]。
2.3 RFID定位
RFID是一种操控简易,适用于自动控制领域的技术,利用电感和电磁耦合的传输特性,实现对被识别物体的自动识别。RFID定位系统通常由电子标签、射频读写器以及计算机数据库构组成。最常应用的定位方法是邻近检测法。利用RSSI实现多边定位算法也可以在一定程度上实现范围估计。根据电子标签是否有源可以分为有源RFID和无源RFID。
2.4 蜂窝网络定位
蜂窝网络技术是一种成熟的通信技术,主要用于对移动手机的定位。蜂窝网络通过检测移动台和多个基站之间传播信号的特征参数(RSSI、传播时间或时间差、入射角等)[10],可采用邻近探测法、AOA、TOA和观测到达时间差(Observed Time Difference Of Arrival,OTDOA)[11]实现定位,可作为普适化的定位方案。目前Cell-ID加上RTT解决方案精度为20~60m。采用智能天线MIMO+TDOA/AOA技术,精度可以达到5~10m。未来基于5G的移动通信网络定位有望实现1m以内的定位精度。
2.5 惯性导航
惯性导航系统(Inertial Navigation System, INS)广泛应用于制导武器、舰艇、火箭、飞机和车辆等的导航与跟踪,其核心组件为IMU。随着微机电技术的发展,传感器尺寸变小,成本降低,同时加入磁力计,被广泛应用于行人导航[12-13]。其优势在于不依赖外部环境,可独立解算位置,同时其设备体积小便于携带。该技术的缺陷是存在累积误差。随着智能手机的普及和微机电器件的发展,基于智能手机的惯性导航成为研究热点[14-17]。
2.6 地磁定位
地磁定位,是指利用地磁场特征的特异性获取位置信息的技术方案[18],在移动平台上可使用搭载的磁力计进行数据采集。定位方法主要采用指纹定位的方法。由于原有磁场信息,故成本相比其他定位技术更低,但仍需要人工建立数据库。IndoorAtlas的地磁定位方案是其中代表,定位精度已能达到1~2m[19]。但因地磁定位需要事先采集地磁特征信息,不适用于未知环境的定位,且因磁场测量易受环境影响,稳定性较差。
2.7 蓝牙定位
蓝牙定位技术主要使用蓝牙4.0规范,基于低功耗蓝牙技术,具有近距离、低功耗、低成本的特点[20-21],可以实现基于邻近探测、多边定位和指纹定位的定位系统[22-23]。定位精度主要取决于基础设施的部署密度,而基础设施体积很小,方便部署。但因其设备为降低功耗考虑,信号传输距离短、信号稳定性较差,需要在算法上考虑修正误差。
2.8 视觉定位
移动平台的视觉定位属于移动传感器采集图像确定传感器位置的定位,适用于智能眼镜、智能手机等搭载图像传感器的移动平台。目前基于同时定位与地图构建(Simultaneous Localization And Mapping,SLAM)技术的视觉定位得到了进一步发展[24]。2016年6月Google公司与联想公司发布了第一款使用ProjectTango技术的AndroidAR手机,配备一系列摄像头(800万像素前置摄像头、1600万像素后置摄像头,一个景深摄像头和一个用于广角拍摄的鱼眼摄像头)、传感器和芯片,能实时为用户周围的环境进行三维建模和室内定位导航。
3 融合定位技术
可以发现,上文介绍的各种定位方式,均存在不同的缺陷或短板,因此综合以上各种定位技术的长处,进行融合定位是目前的主流发展方向。
融合定位主要是对来自单个或多个不同传感器的信息进行相关和综合,以获得更精确的目标信息和身份估计的处理过程[25]。融合处理的对象不局限于接收到的初级数据,还包括对多源数据进行不同层次抽象处理后的信息。在多传感器信息融合中,各传感器提供的信息都具有一定的不确定性和不准确性。因此,对这些信息的融合过程是一个不确定性信息的推理和决策过程。
3.1 融合方式的分类
根据融合处理的方式不同,可以将融合分为集中式、分布式和混合式三种[26]。
集中式是指各传感器获取的信息不经处理直接传送到信息融合中心,进行组合和推理,完成最终融合处理。
分布式是指在各传感器处完成一定量的计算和处理任务后,将压缩后的传感器数据传送到融合中心,在融合中心将接收到的多位信息进行组合和推理,完成融合。
混合式是兼有集中式和分布式的特点,送到融合中心的数据既有处理后的也有未经处理的。
从表1可以看出,三种方式均有各自的特点,但是分布式具有造价低、可靠性高、生成能力强,且对传感器间通信带宽要求不高等优点。因此在许多应用结构中,分布式具有相当的吸引力[26]。
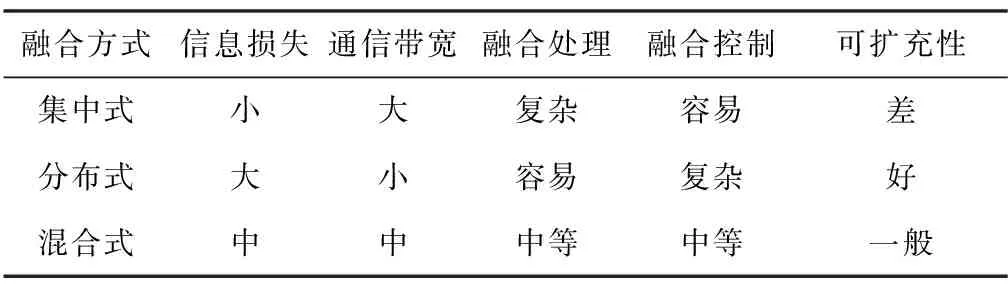
表1 三种融合结构的特点[26]
信息融合按其在多传感器信息处理层次中的抽象程度,可以分为像素级、特征级和决策级融合[27]。
像素级融合是指在融合算法中,要求进行融合的传感器数据间具有精确到一个像素的匹配精度的任何抽象层次的融合。融合结果具有最好的精度,但数据处理量大,实时性差。
特征级融合是指从各个传感器提供的原始数据中进行特征提取,然后融合这些特征。因此在融合前实现了一定的信息压缩,有利于实时处理。
决策级融合是指在融合之前,各传感器数据源都经过变换并获得独立的估计。系统根据一定的准则和决策可信度对各自传感器的属性决策结果进行融合,最终得到整体一致的决策。
像素级融合能够提供目标的细微信息,但所要处理的信息量大,处理代价高,通信量大,抗干扰能力差。决策级融合的优点是容错性强,通信量小,抗干扰能力强,可应用于异质传感器,其缺点是预处理花费大。特征级融合则兼顾了像素级融合和决策级融合的优缺点。
下面就几种典型的融合算法进行介绍。
3.2 加权融合算法
加权算法是一种最简单直观的融合算法。在加权融合算法中,将多个融合源提供的位置信息分别冠以相应的权重,从而获取最后的融合结果[28]。其基本原理如图1所示。

图1 加权融合算法原理Fig.1 Principle of weighted fusion algorithm
融合结果F(x)可以表示为
F(x)=w1f1(x)+w2f2(x)+…+wnfn(x)
(1)
其中,f1(x),f2(x),…,fn(x)代表定位源,w1,w2,…,wn表示权重因子,且需要满足所有权重因子的和为1。
加权融合具有算法简单、实现方便的特点,但是当权重因子选取不当时,并不能获得较佳的融合结果。
3.3 因子图融合导航
因子图(Factor Graph)作为一种较为新颖的方法,最初被用于SLAM问题中。由于其具有增长平滑的特性以及全局优化的特点,也逐渐被用于传感器融合领域。
因子图将一个导航方位估计问题抽象为一个双射图G=(F,Θ,Σ),其中含有两种节点类型:因子节点fi∈F与状态节点θi=Θ。当因子fi与状态θi有联系时,一个边eij∈Σ便存在于该状态与因子之间。将导航问题中的测量模型抽象为
zi=hi(Θi)+vi
(2)
其中,zi为传感器对于状态θi利用测量函数hi(θi)的测量,vi为测量噪声。假设vi遵循高斯分布,那么可以得到一个因子化的最优化目标
(3)
(4)
其中的数据由因子图表示。
定义一个典型的导航状态为:x={p,v,b},每个状态覆盖三种节点:位姿节点p,包括三维平动以及三维转动;节点v为速度节点,包括三维的速度;b为传感器的偏差节点。那么一个典型的多传感器因子图模型如图2所示。
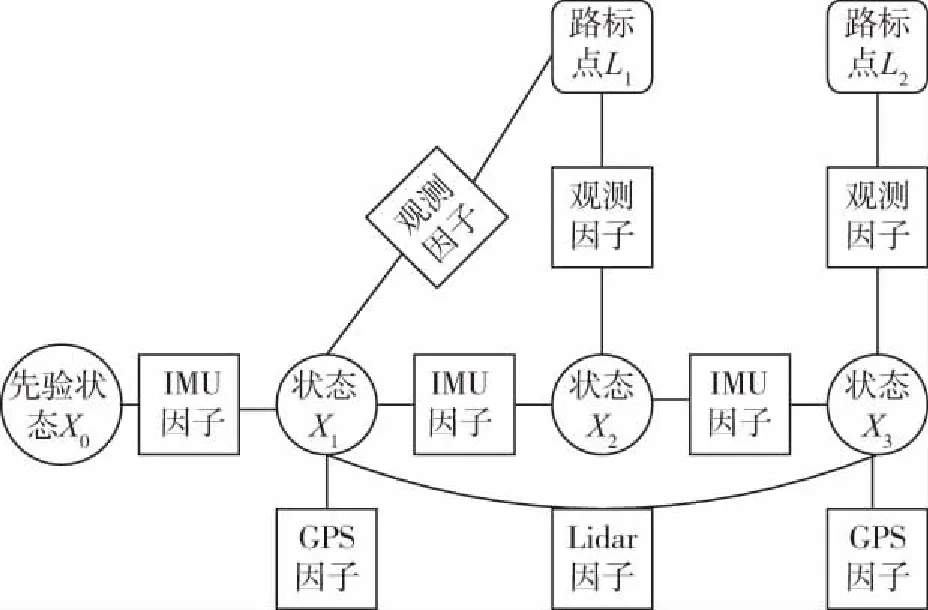
图2 多传感器因子图模型Fig.2 Multi-sensor factor graph model
在有了这样的数据结构后,对整体误差进行全局优化,便可达到融合多传感器滤波的效果。由于因子图的特性,可将任何传感器划分为几个大类,分别对应为不同的因子,便可无阻碍的动态地插入现存因子图中,实现即插即用的融合滤波的目的。具体的分类方式如表2所示。

表2 传感器分类表
表2可根据新增加传感器的性质随时扩容。需要注意的是简单的传感器(或者说数据类型可以直接得到的传感器类型)是可以直接动态插入已知因子图的,同时复杂的传感器节点,例如视觉等追踪方法需要将数据处理以后再根据分类插入因子图。
3.4 卡尔曼滤波
3.4.1 算法简介
卡尔曼滤波(Kalman Filtering, KF)算法是指在已知系统数学模型的情况下,利用状态空间方程和测量模型递推出在统计意义下最优的融合数据估计。利用KF可以在出现环境噪声和传感器噪声时减少有关环境中物体位置的不确定性。
图3给出了KF的五个核心要素:状态向量及其协方差、系统模型、观测向量及其协方差、观测模型及滤波算法。
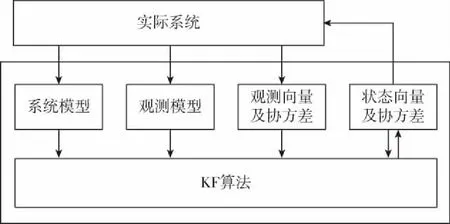
图3 卡尔曼滤波器要素Fig.3 Components of Kalman filter
状态向量(state vector)是一组描述系统的参数,是KF估计的对象。在大多数导航应用中,状态量一般包括位置或者位置误差、速度、姿态及导航传感器的误差也可作为被估计状态。
与状态向量相关联的是误差协方差矩阵(error covariance matrix)。该矩阵描述了KF状态估计的不确定度及估计误差之间的相关程度。
系统模型(system model)也称为过程模型或者时间传递模型,描述了KF的状态与误差协方差矩阵随时间的变化特性。
观测向量(measurement vector)是一组针对同一时刻的系统特性的测量值,是状态向量的函数。与观测向量相对应的是观测噪声协方差(measurement noise covariance)矩阵,它描述了观测噪声的统计特性。
观测模型(measurement model)描述了在没有观测噪声的情况下,观测向量作为真实状态向量的函数是怎样变化的。观测模型也是基于已知的系统特性建立的,是确定的。
3.4.2 算法步骤
如图4所示,KF使用观测向量、观测模型和系统模型来获得状态向量的最优估计。每次迭代中的步骤多达10个,步骤1~4为系统传递流程,步骤5~10为测量更新流程。

图4 卡尔曼滤波算法步骤Fig.4 Process of Kalman filtering algorithm
系统传递的目的是根据已知的系统特性,从上一组观测量修正后的时刻推进到当前一组观测量的时刻,前向预测状态向量估计与误差协方差矩阵。在没有最新观测信息的情况下,系统传递提供了状态向量当前时刻的KF最优估计。在测量更新流程里,用最新观测信息更新状态估计和误差协方差矩阵。
3.4.3 融合定位中的应用
基于KF的估计技术在导航中应用广泛,包括INS的精校准和标校、GNSS导航、GNSS的信号监测、INS/GNSS组合导航以及多传感器组合导航等[27]。如图5所示,不同于传统的集中式卡尔曼滤波器,联邦滤波是一种分散化卡尔曼滤波[39]。分散化滤波一般用于大系统中,解决了大系统的状态估计问题,避免了过大的高阶运算量,同时具有容错性能好、设计灵活等特点,非常适合融合定位中的信息融合处理。
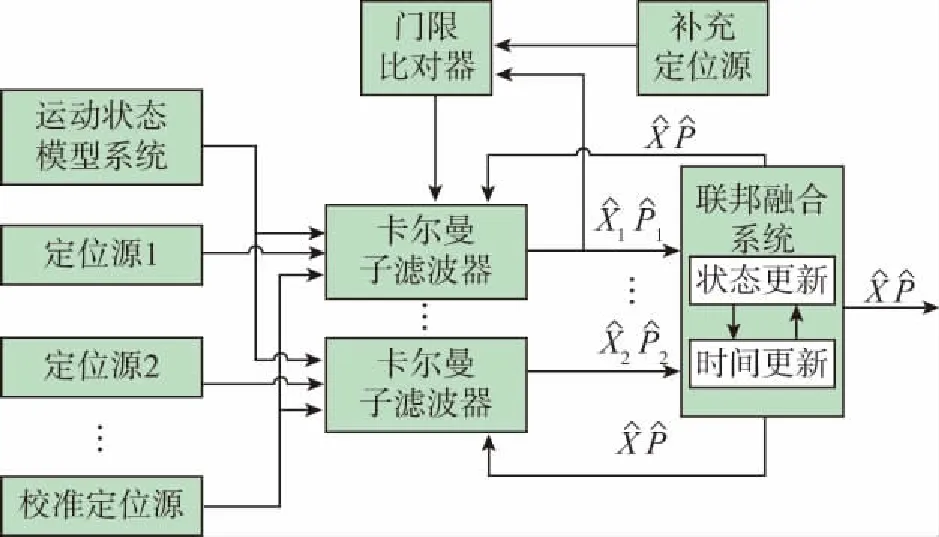
图5 联邦滤波器原理[38]Fig.5 Principles of Federal filter
3.5 粒子滤波
3.5.1 算法简介
粒子滤波是指通过寻找一组在状态空间中传播的随机样本对概率密度函数进行近似,以样本均值代替积分运算,从而获得状态最小方差估计的过程,这些样本即称为粒子。随着对粒子的筛选,粒子的概率密度函数逐渐逼近状态的概率密度函数,粒子滤波估计即达到了最优贝叶斯估计的效果。
3.5.2 算法步骤
粒子滤波的思想基于蒙特卡罗方法,其核心思想是通过从后验概率中抽取的随机状态粒子来表达其分布,是一种顺序重要性采样(Sequential Importance Sampling,SIS)算法。
基于随机采样运算的蒙特卡罗方法可将积分运算转化为有限样本点的求和运算,即状态概率密度分布可用如下经验概率分布近似表述
(5)
(6)
更新概率密度函数为
(7)
其中
(8)
SIS方法的实现步骤如下[29]:

2)逐点计算对应的p(xk,xk-1)和p(zk,xk);
3)利用式(8)计算对应样本的重要性权系数;
4)对权进行归一化处理,即
(9)
5)利用式(8)对p(xk,z1:k)进行估计。
粒子滤波算法摆脱了解决非线性滤波问题时随机量必须满足高斯分布的制约条件, 并在一定程度上解决了粒子数样本匮乏的问题, 因此近年来该算法在许多领域得到成功应用。
与其他次优贝叶斯滤波算法相比,粒子滤波的突出优势就在于对复杂问题的求解上, 例如高维的非线性、非高斯动态系统的状态递推估计或概率推理问题;因为粒子滤波的算法性能在理论上对这些都不敏感[30]。
3.6 人工神经网络
人工神经网络(Artificial Neural Network, ANN)是基于生物学中神经网络的基本原理,在理解和抽象了人脑结构和外界刺激响应机制后,以网络拓扑知识为理论基础,模拟人脑的神经系统对复杂信息的处理机制的一种数学模型。该模型以并行分布的处理能力、高容错性、智能化和自学习等能力为特征。它实际上是一个由大量简单元件相互连接而成的复杂网络,具有高度的非线性,能够进行复杂的逻辑操作和非线性关系实现的系统[31]。
人工神经网络的工作过程包括离线学习和在线判断两部分。学习过程中各神经元进行规则学习,权参数调整,非线性映射关系拟合以达到训练精度;判断阶段则是训练好的稳定的网络读取输入信息,通过计算得到输出结果。
人工神经网络一般包含输入层、隐含层与输出层这三层结构,其中隐含层可包括多层,如图6所示的二层隐藏层神经网络。
图6 人工神经网络结构[31]Fig.6 Structure of artificial neural network
单个节点结构与图1加权融合算法相似。相同层之间的节点无连接,层与层之间的节点采用全连接结构,输入层对于输入的元素不作任何处理,即经输入层节点的输入与该节点输出相同,除了输入层的节点外的节点都有一个激活函数,这些节点的每个节点都对输入矢量的各个元素进行相应的加权求和,然后使用激活函数作用于上面作为输出。
近年开始受到广泛关注的深度学习,本质上构建含有多隐层的机器学习架构模型,打破了传统神经网络对层数的限制,可根据设计者需要选择网络层数[32]。
多传感器融合即是建立起多源不确定冗余信息与融合结果之间的映射关系,人工神经网络显著的特点是以任意精度实现网络输入和输出之间复杂的线性或非线性映射关系;人工神经网络通过网络变换和动力学行为得到了并行分布式的信息处理功能,决定了其结合的多传感器融合系统具有很强的实时性和容错性。
3.7 模糊逻辑推理
模糊逻辑推理使用论域、隶属度函数等手段建立起多传感器信息的不确定性描述,然后通过合成运算模糊推理出相应的融合结果[33]。其本质上就是将一个给定输入空间通过模糊逻辑的方法映射到一个特定的输出空间的计算过程,多传感器在融合过程中。因为融合信息点不确定性,不可能将信息直接进行归类或采用某种明确的规则,因此,模糊逻辑推理方法被广泛采纳。
实际上推理过程中将已知规则归纳为前因与结果两论域间的模糊关系,再将前因论域的现有知识与归纳得到的模糊关系进行合成运算,推出当前知识下的结论。这种模糊关系不仅实现了多传感器输出数据空间与目的空间之间较为复杂的非线性映射关系,并且具有较强的鲁棒性和容错性[34]。与KF算法不同,模糊逻辑推理方法不用建立精确的数学模型,也就避免了因为系统模型不准确而产生的误差。但其算法逻辑的复杂性阻碍了其广泛推广[35]。
3.8 证据推理
室内D-S证据推理是一种广义的贝叶斯推理方法,通常处理因不确定信息所引起的不确定性。证据推理首先由Dempster提出构造不确定推理模型的一般框架,将命题的不确定问题转化为几何的不确定问题,之后Shafer对该理论进行了补充,从而形成了处理不确定信息的D-S证据[36]。D-S证据推理利用概率分配函数、信任函数、似然函数来描述客观证据对命题的支持程度,用它们之间的推理与运算来进行目标识别。其最大的特点是对不确定信息采用区间估计来描述,而不是用点估计的方法。具体理论可以参考文献[40]。
D-S证据理论可以不需要先验概率和条件概率密度,但是它存在潜在的指数复杂度和要求证据是独立的问题[37]。证据理论的判决规则常常有很大的主观性。
运用证据推理理论,多传感器信息融合的一般过程如下[40]:
1)分别计算各传感器的概率分配函数、信任函数和似然函数;
2)利用Dempster合并规则,求得所有传感器联合作用下的概率分配函数、信任函数和似然函数;
3)在一定决策规则下,选择具有最大支持度的目标。
3.9 融合定位算法对比
融合定位算法结果如表3所示。

表3 七种融合算法的对比
4 结束语
融合定位由于其精度上优于单一定位源,并且具备更好的鲁棒性以及可靠性,再加上智能移动平台的普及和发展,基于智能移动平台的融合定位技术在未来将会得到更多的研究、发展和应用。
本文首先对目前主流的智能移动平台的操作系统和内嵌传感器进行分类介绍,并对可在移动平台应用的定位技术进行分别详细阐述。然后对目前的多种融合定位方式进行分类介绍,并阐述了算法的基本原理。最后对融合定位技术进行简要的对比分析。
[1] Zhou Y B, Lai J, Guo X Y, et al.A research on all source navigation and positioning and its critical technology[C]//2015 Proceedings of China Satellite Navigation Conference (CSNC) : Volume III.Springer, Berlin, Heidelberg, 2015: 801-808.
[2] Stat Counter Global Stats.Operating system market share worldwide[DB/OL].(2017-04-05).http://gs.statcounter.com/os-market-share.
[3] Strategy Analytics.[DB/OL].(2017-04-05).https://www.strategyanalytics.com.
[4] BOSCH.Bosch Sensortec BMC150 [DB/OL].(2017-04-05).https://www.bosch-sensortec.com/bst/products/all_products/homepage_1_ohne_marginalspalte_52.
[5] TDK InvenSense.InvenSense 6-Axis [DB/OL].(2017-04-05).https://www.invensense.com/products/motion- tracking/6-axis/.
[6] STMicroelectronics LIS2DE12.MEMS digital output motion sensor: ultra low-power high performance 3-axes femto accelerometer[DB/OL].(2017-04-05).http://www.st.com/content/st_com/en/products/mems-and-sensors/accelerometers/lis2de12.html.
[7] 赵永翔.基于无线局域网的室内定位系统研究[D].武汉: 武汉大学, 2010.
[8] Yuan Y, Pei L, Xu C, et al.Efficient WiFi fingerprint training using semi-supervised learning[C]//Ubiquitous Positioning Indoor Navigation and Location Based Service (UPINLBS).IEEE, 2014: 148-155.
[9] Reddy H, Chandra M G, Balamuralidhar P, et al.An improved time-of-arrival estimation for WLAN-based local positioning[C]//International Conference on Communication Systems Software and Middleware.COMSWARE 2007.IEEE Xplore, 2007:1-5.
[10] 邓平.蜂窝网络移动台定位技术研究[D].成都: 西南交通大学, 2002.
[11] Wang C, Xu J.Enhanced OTDOA technology in 3G location service[J].Telecommunications Science, 2005(8): 5.
[12] 陈伟.基于GPS和自包含传感器的行人室内外无缝定位算法研究[D].合肥: 中国科学技术大学, 2010.
[13] Qian J, Pei L, Ma J, et al.Vector graph assisted pedestrian dead reckoning using an unconstrained smartphone[J].Sensors, 2015, 15(3): 5032-5057.
[14] Qian J, Pei L, Ying R, et al.Continuous motion recognition for natural pedestrian dead reckoning using smartphone sensors[C]//Proceedings of the 27thInternational Technical Meeting of the ION Satellite Division.ION GNSS, 2014.
[15] Wang L, Dong Z, Pei L, et al.A robust context-based heading estimation algorithm for pedestrian using a smartphone[C]//Proceedings of the 28thInternational Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2015).Tampa, SEP, 2015: 14-18.
[16] Qian J, Pei L, Ying R, et al.Continuous motion recognition for natural pedestrian dead reckoning using smartphone sensors[C]//Proceedings of the 27thInternational Technical Meeting of the ION Satellite Division.ION GNSS, 2014.
[17] Liu D, Pei L, Qian J, et al.A novel heading estimation algorithm for pedestrian using a smartphone without attitude constraints[C]//2016 4thInternational Conference on Ubiquitous Positioning, Indoor Navigation and Location Based Services (UPINLBS).IEEE, 2016: 29-37.
[18] Haverinen J, Kemppainen A.A geomagnetic field based positioning technique for underground mines[C]//IEEE International Symposium on Robotic and Sensors Environments(ROSE).IEEE, 2011:7-12.
[19] Indoor Atlas.How-it-works[EB/OL].(2016-02-17).http://www.indooratlas.com/how-it-works/.
[20] 汪苑, 林锦国.几种常用室内定位技术的探讨[J].中国仪器仪表, 2011(2):54-57.
[21] 刘明伟, 刘太君, 叶焱,等.基于低功耗蓝牙技术的室内定位应用研究[J].无线通信技术, 2015, 24(3):19-23.
[22] Dahlgren E, Mahmood H.Evaluation of indoor positioning based on Bluetooth Smart technology[D].Gothenburg: Chalmers University of Technology, 2014.
[23] Pei L, Chen R, Liu J, et al.Using inquiry-based Bluetooth RSSI probability distributions for indoor positioning[J].Journal of Global Positioning Systems, 2010, 9(2): 122-130.
[24] Zhou H, Zou D, Pei L, et al.StructSLAM: Visual SLAM with building structure lines[J].IEEE Transactions on Vehicular Technology, 2015, 64(4):1364-1375.
[25] 周芳, 韩立岩.多传感器信息融合技术综述[J].遥测遥控, 2006, 27(3): 1-7.
[26] 何友.多传感器信息融合及应用[M].北京: 电子工业出版社, 2000.
[27] 格罗夫斯.GNSS与惯性及多传感器组合导航系统原理[M].北京: 国防工业出版社, 2011.
[28] Dong Z, Wu Y, Sun D.Data fusion of the real time positioning system based on RSSI and TOF[C]//2013 5thInternational Conference on Intelligent Human-Machine Systems and Cybernetics(IHMSC).IEEE, 2013: 503-506.
[29] 胡士强, 敬忠良.粒子滤波算法综述[J].控制与决策, 2005, 20(4): 361-365.
[30] 程水英, 张剑云.粒子滤波评述[J].宇航学报, 2008, 29(4): 1099-1111.
[31] 田景文, 高美娟.人工神经网络算法研究及应用[M].北京: 北京理工大学出版社, 2006.
[32] Lecun Y, Bengio Y, Hinton G.Deep learning[J].Nature, 2015, 521(7553):436-444.
[33] 郭富强.模糊推理发展综述[J].陕西广播电视大学学报, 2007, 9(4): 71-74.
[34] 李伟, 王彦昕.基于模糊逻辑推理的室外移动机器人视觉导航方法[J].电子学报, 1996(11): 99-101.
[35] 裴道武.关于模糊逻辑与模糊推理逻辑基础问题的十年研究综述[J].工程数学学报, 2004, 21(2): 249-258.
[36] 徐从富, 耿卫东, 潘云鹤.Dempster-Shafer证据推理方法理论与应用的综述[J].模式识别与人工智能, 1999, 12(4): 424-430.
[37] 宋维堂, 张鸰.基于智能车辆的多传感器数据融合算法研究与分析综述[J].现代交通技术, 2012, 9(3): 82-85.
[38] 赵万龙, 孟维晓, 韩帅.多源融合导航技术综述[J].遥测遥控, 2016, 37(6): 54-60.
[39] Xu Y, Liang X.Information fusion for radar/infrared compound seeker based on federated filter[J].International Journal of Digital Content Technology & Its Applications, 2011, 5(4): 218-229.
[40] 马国清, 赵亮, 李鹏.基于Dempster-Shafer证据推理的多传感器信息融合技术及应用[J].现代电子技术, 2003, 26(19): 41-44.
ASurveyofFusionPositioningTechnologiesforSmartMobilePlatform
PEILing1,LIUDong-hui1,GONGZheng1,ZHAOYi2
(1.ShanghaiJiaoTongUniversity,ShanghaiKeyLaboratoryofNavigationandLocation-basedServices,Shanghai200240,China;2.ShanghaiCHCNavigationLtd.,Shanghai201702,China)
In recent years, with the increasing demand for location-based services, a variety of positioning technologies for different scenarios have been researched.However, due to diversity and complexity of positioning scenarios, the need of different scenes cannot be met by single positioning method.Meanwhile, with the development of hardware technologies, there are many forms of mobile platforms carrying more sensors.Therefore, it is possible to achieve a fused positioning scheme based on smart mobile platform.This paper makes detailed introductions of the current smart mobile platforms and related positioning technologies in the first place.Then the analysis and comparison of the research work of fusion positioning technologies are introduced.Finally, this paper makes a brief description of the analysis and summary of fusion positioning technologies.
Location-based services; Smart mobile platform; Fusion positioning
Signal Strength Indicator,RSSI)的指纹定位法是目前主流的WLAN定位方法[8],定位精度取决于校准点的密度,从2~10m不等。同时基于TOA测距的定位方法由于多径效应和时钟精度低,定位效果较差[9],而基于RSSI测距的定位方法由于信号衰减与距离的关系在不同环境和设备条件下都有改变,定位结果也不理想。
2017-03-28;
:2017-04-21
:上海市科委项目(14XD1421800, 15511105100);中国第二代卫星导航系统重大专项(GFZX0301010708)
:裴凌(1977-),男,江西南昌,博士,副教授,研究方向为室内定位与融合导航。E-mail:ling.pei@sjtu.edu.cn
10.19306/j.cnki.2095-8110.2017.05.002
U666.12
:A
:2095-8110(2017)05-0008-11
猜你喜欢
中学生数理化·七年级数学人教版(2022年6期)2022-06-05
小学生学习指导(低年级)(2021年12期)2021-12-31
纺织科学研究(2021年1期)2021-12-03
导航定位与授时(2020年5期)2020-09-23
电子制作(2019年22期)2020-01-14
中国外汇(2019年20期)2019-11-25
阅读与作文(英语初中版)(2019年8期)2019-08-27
时代英语·高一(2019年1期)2019-03-13
小学生学习指导(低年级)(2018年11期)2018-12-03
小学生学习指导(低年级)(2018年11期)2018-12-03