
基于模糊PID控制的空气弹簧振动特性研究
2017-10-11 01:37颜新鹏
重庆理工大学学报(自然科学) 2017年9期
颜新鹏,王 炯
(1.一拖(洛阳)神通工程机械有限公司, 河南 洛阳 471003;2.江苏大学 汽车与交通工程学院, 江苏 镇江 212013)
基于模糊PID控制的空气弹簧振动特性研究
颜新鹏1,王 炯2
(1.一拖(洛阳)神通工程机械有限公司, 河南 洛阳 471003;2.江苏大学 汽车与交通工程学院, 江苏 镇江 212013)
针对在粗糙路面行驶时空气弹簧座椅舒适性较差的情况,采用模糊PID控制策略,以人体加速度误差和误差变化率作为输入量,以空气弹簧控制力作为输出量,设计了模糊PID控制器。为验证控制效果,与ADAMS建立的整车模型进行联合仿真,并与被动空气弹簧座椅进行对比分析。仿真结果表明,采用模糊PID控制的座椅系统减振效果得到了进一步改善,提高了人体振动舒适性。
空气弹簧;模糊PID控制;联合仿真;舒适性
Abstract: According to the situation that the air spring seat is less comfortable in rough road surface, the fuzzy PID control strategy is adopted in this paper. The fuzzy PID controller is designed by using the acceleration error and the error rate of the human body as the input quantity and using the air spring as the output. In order to verify the control effect, the combined simulation of the vehicle model was established with ADAMS, and the control effect was compared with that of the passive air spring seat. The simulation results show that the damping effect of the seat system with fuzzy PID control has been further improved, and the vibration comfort of the human body is improved.
Keywords: air spring;fuzzy PID control;joint simulation;comfortable
空气弹簧座椅悬架可以根据车辆行驶情况和路面工况来改变座椅刚度和阻尼以衰减振动,有非常好的市场前景,但对车辆在不同路面状况下的适应性还有较大的改进余地。近年来,各研究机构和学者纷纷在座椅系统中利用控制策略来获得更好的减振性。控制策略方法主要有模糊控制、自适应控制、PID控制、神经网络控制、天棚控制等[1]。本文主要研究对象为空气弹簧座椅,采用PID控制与模糊控制相结合的控制策略,在Matlab/Simulik中建立控制器,并与ADAMS进行联合仿真,研究结果对空气弹簧控制技术的应用具有重要指导意义。
1 模糊PID控制器的设计
1.1 模糊PID控制系统的组成
模糊PID控制系统主要包括输入/输出接口、模糊控制器、PID控制器、被控对象四个组成部分。模糊PID控制系统框图如图1所示。
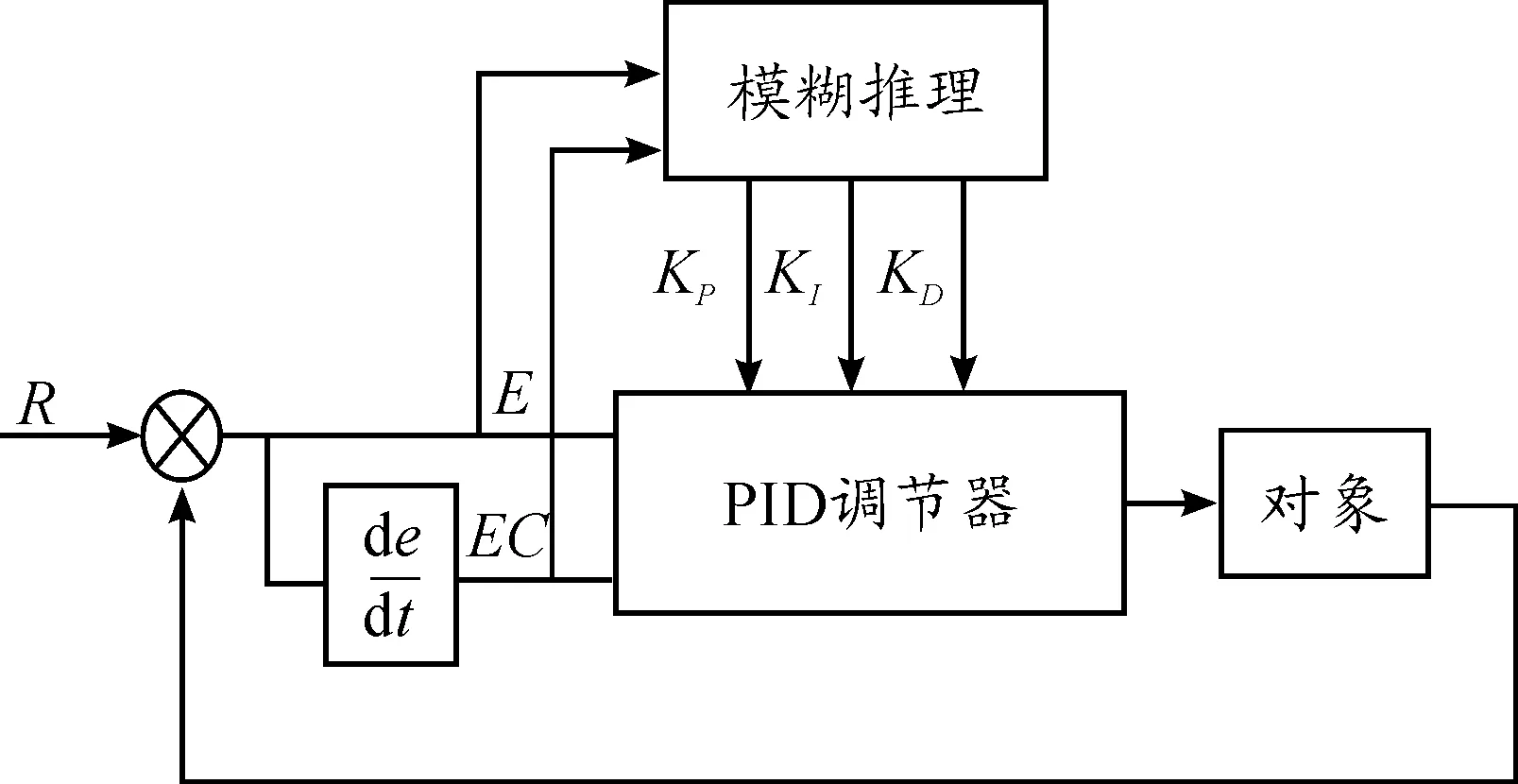
图1 模糊PID控制系统框图
模糊PID控制的核心是模糊控制规则,模糊控制规则在模糊控制器中完成。本文的模糊控制器为二维控制器,输入量为加速度误差及误差变化率,输出量为空气弹簧控制力。
1.2 模糊化处理
1.2.1 定义模糊集
考虑到误差、误差变化率及控制量的正负性,将加速度误差、误差变化率及控制量划分为7个模糊集合,有极小(NB)、小(NM)、中小(NS)、中(ZO)、中大(PS)、大(PM)、极大(PB),同时选取加速度误差、误差变化率及控制量的内部论域均为 {-6,-5,-4,-3,-2,…,5,6}。
模糊PID控制器的内部论域需要由真实论域转化而得到。根据研究某座椅振动的实际情况,取加速度误差的变化范围为[-6,6],加速度误差变化率的范围为[-150,150],控制力的变化范围为[-2 000,2 000][2]。
1.2.2 确定隶属度函数
常见的隶属度函数有梯形函数、三角形函数、高斯函数等[3]。本文选用三角形函数作为模糊子集的隶属度函数,这种隶属度函数运算和表达比较简单,占用内存空间较小,当出现一个误差时,能迅速反应并产生相应的调整输出。
将模糊PID控制器的输入、输出各个子集的隶属函数设置成如图2所示。
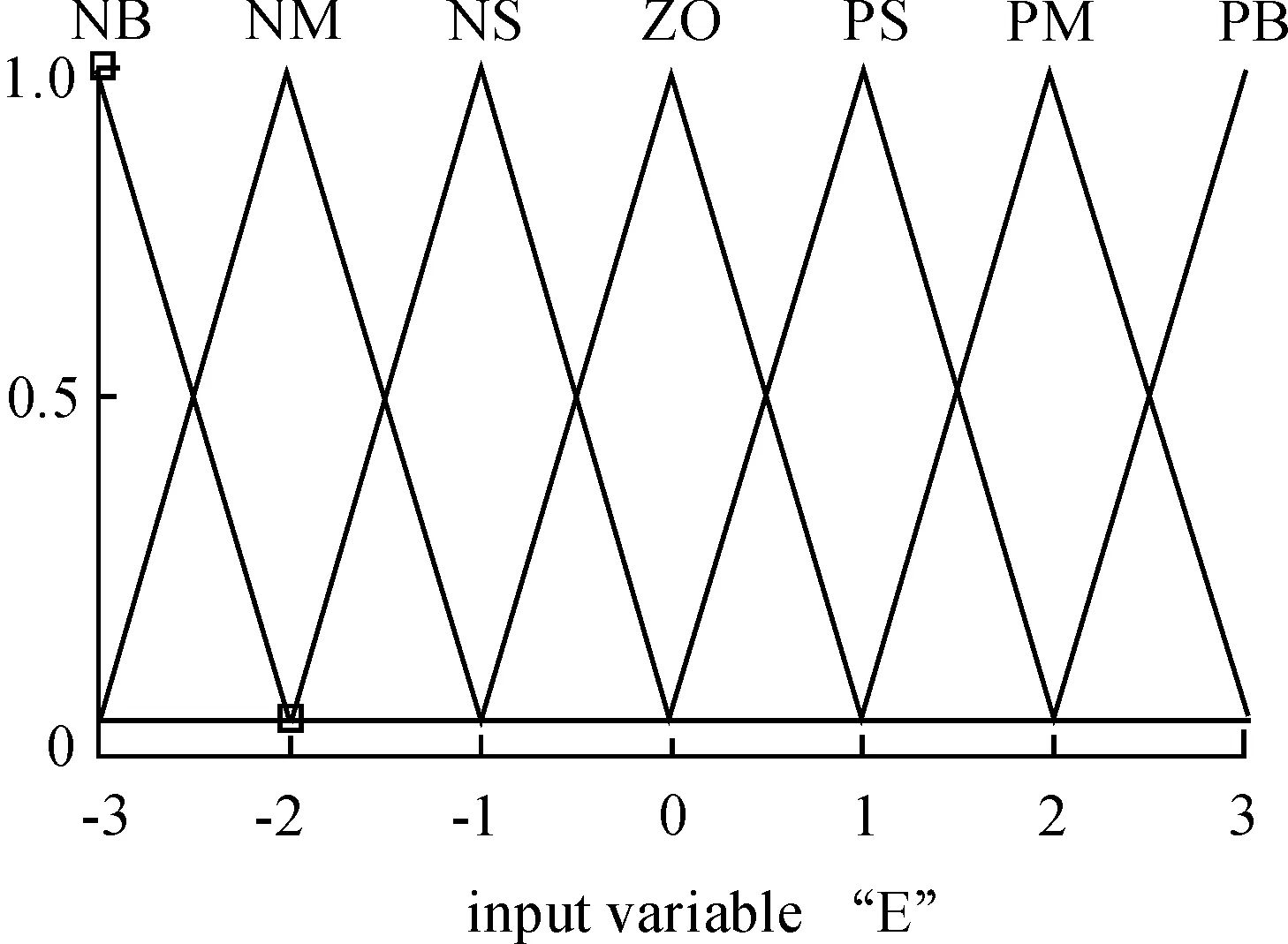
图2 输入、输出变量的隶属函数
1.3 模糊推理
模糊PID控制器为二维控制器,加速度误差的模糊变量有7个语言值,误差变化率有7个语言值,则共7×7=49条控制规则。本文采用Mamdani推理方法,在设计控制规则时遵循以下原则:当误差较大时,选择控制量以尽快消除误差为主;当误差较小时,选择控制量以稳定性为主,以防止系统超调。
1.4 模糊判决
模糊控制器的输出不是精确量,需先将输出的模糊集转化成精确量,才可用于被控对象。平均最大隶属度法、面积平分法和面积中心法是常用的解模糊化方法,面积中心法又叫重心法。相比较而言,重心法是一种比较理想的解模糊化方法。本文的模糊PID控制器采用的解模糊化方法是重心法。它的基本原理是计算隶属度函数曲线所包围区域的重心,这种方法具有更平滑的输出推理控制[4]。
1.5 模糊PID控制算法
对误差和误差变化率采用模糊推理后得到PID控制器3个参数的调整量,控制系统输出的自整定参数由下述公式求出:
(1)
式中,Kp0、Ki0、Kd0为PID控制器的初始设定值,本文采用的是Ziegler-Nichols临界比例度法[5]。控制系统在工作过程中,微机测试系统适时地检测系统的输出响应值,通过计算加速度误差及误差变化率的变化量,对模糊规则表进行查询,完成对控制参数的自动调整。
1.6 模糊PID控制器模型的创建
本文为后续研究控制系统的合理性、可行性,在Matlab/Simulink中建立模糊PID控制系统,如图3所示。
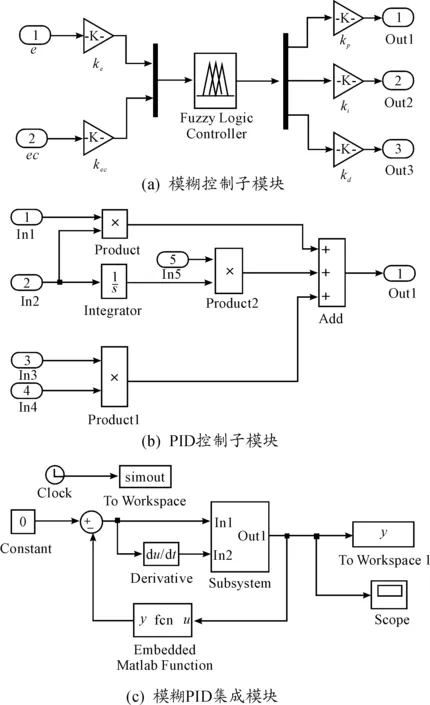
图3 模糊PID控制系统simulink模型
2 ADAMS与Matlab联合仿真模型的创建
为验证控制系统的有效性,首先在ADAMS软件中建立整车模型,如图4所示。整车模型为某机场消防车模型。

图4 机场消防车整车模型
机场消防车模型中,座椅与车身地板为刚性连接,没有减振装置,为实现对空气弹簧座椅的控制,首先在ADAMS标准界面下依次选择Build>Force>Spring命令,在座椅与车身地板之间创建螺旋弹簧悬架,然后在ADAMS/Car标准环境中找到Command Navigator界面,在assembly>replace中找到instant命令,将产生的螺旋弹簧悬架转换为空气弹簧悬架。图5为空气弹簧悬架座椅模型。

图5 空气弹簧悬架座椅模型
机场消防车空气弹簧座椅模型建好后,为了实现与Matlab的联合仿真,要将ADAMS软件需要的参数导出[6]。首先在ADAMS中建立输入输出变量,input1表示驱动,input2表示作动力,output1表示空气弹簧座椅上的加速度,output2表示座椅上的垂直位移;其次将建立的变量输出并保存模型,然后启动Matlab,将ADAMS软件生成的“Tractor.acf”文件、“Tractor.cmd”文件、“Tractor.m”文件复制到Matlab工作目录下。建立的控制模块如图6所示。
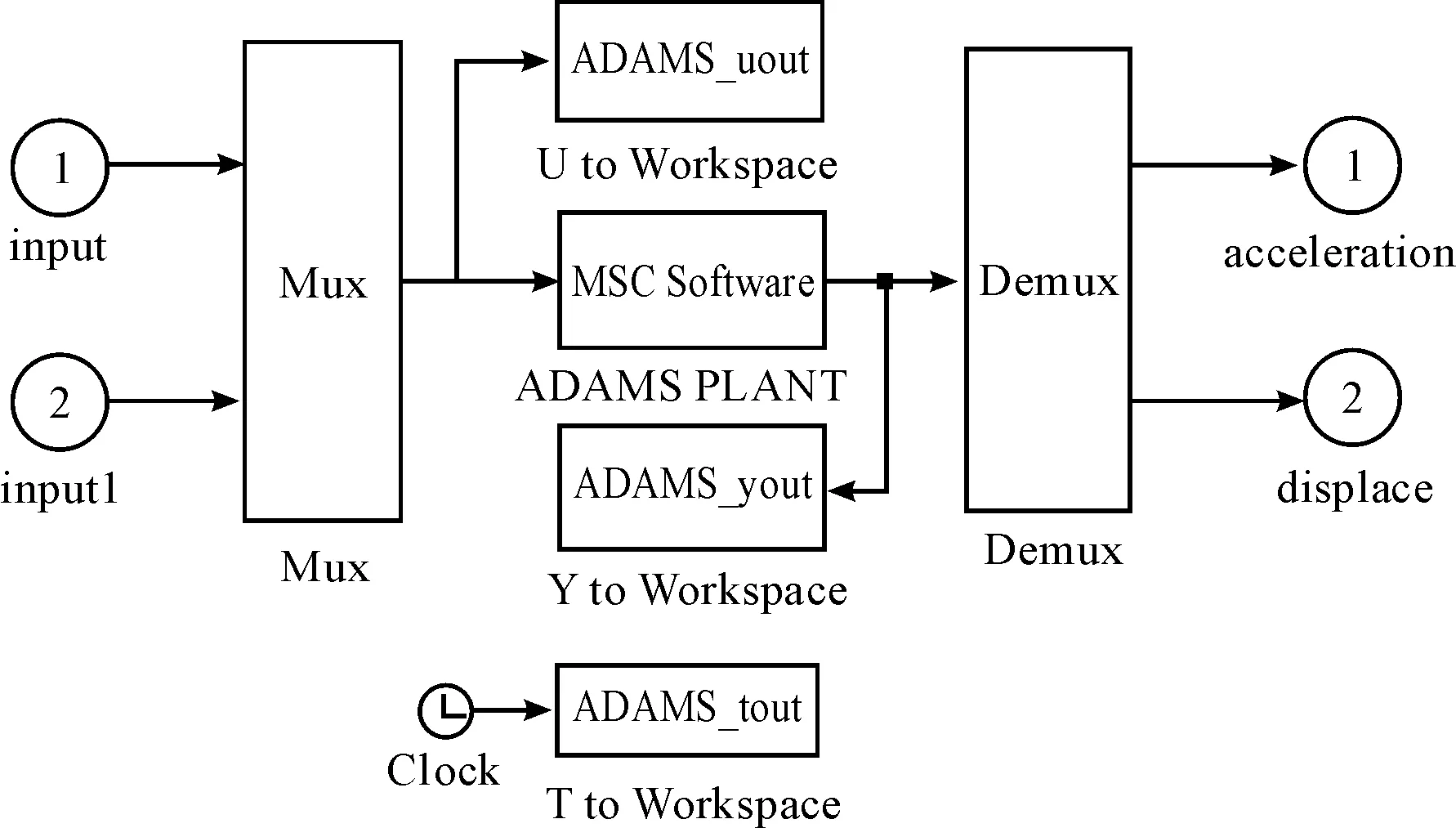
图6 ADAMS控制模块
将生成的adams_sub复制到已经建立好的控制系统中,得到联合仿真模型,如图7所示。
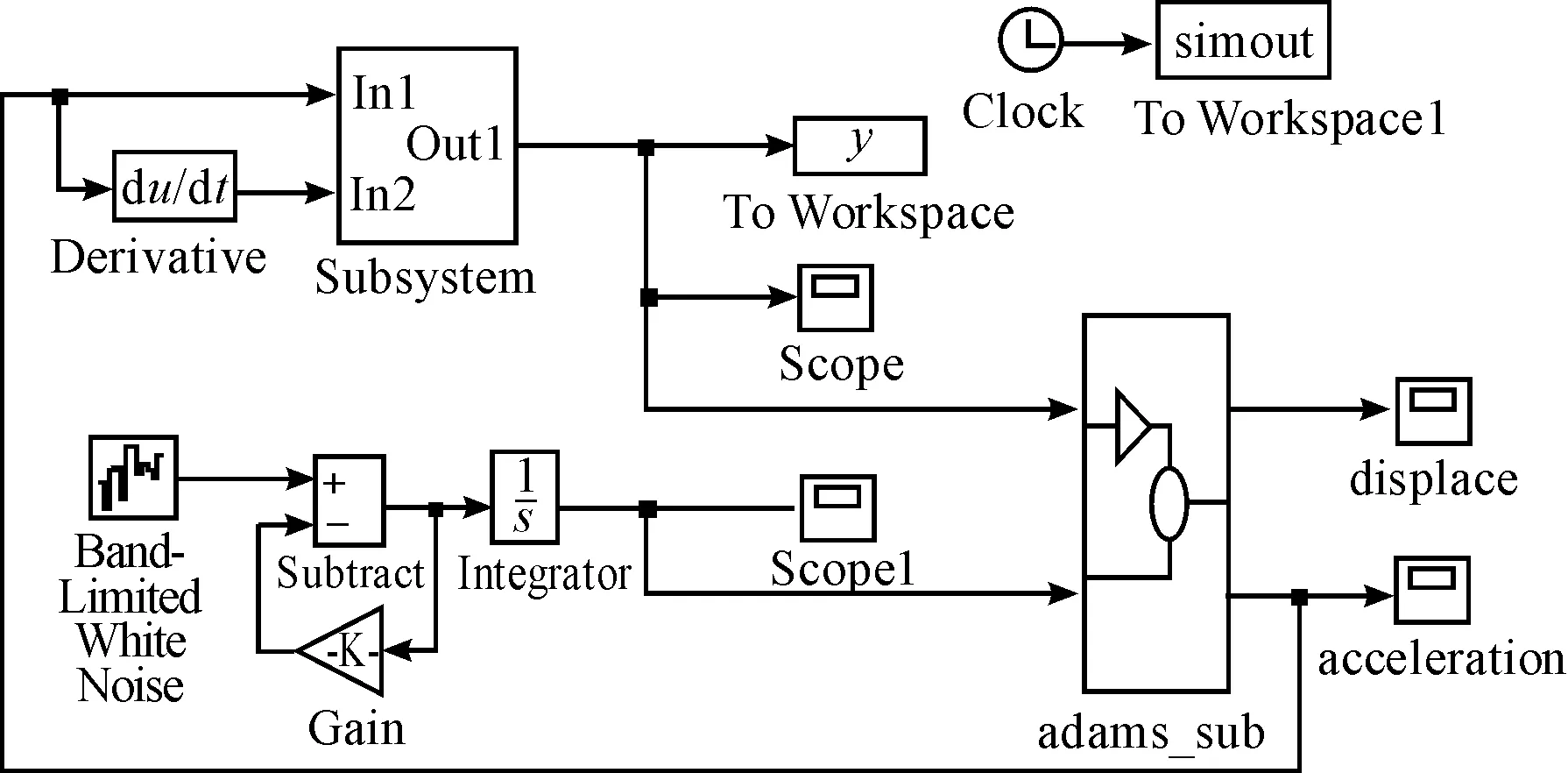
图7 Matlab/Simulink中建立的ADAMS-simulink联合仿真模型
3 路面模型的建立
车辆在行驶过程中,车轮受到的路面激励可用数学模型表示[7],如公式(2)所示。

(2)
式中:q(t)表示路面激励;w(t)表示白噪声;u表示车速;a表示所选路面的空间频率,对应D级路面[8],a=0.100 7(1/m)。
上述数学模型可以在Matlab/Simulink里实现,如图8所示,生成的D级路面位移如图9所示。
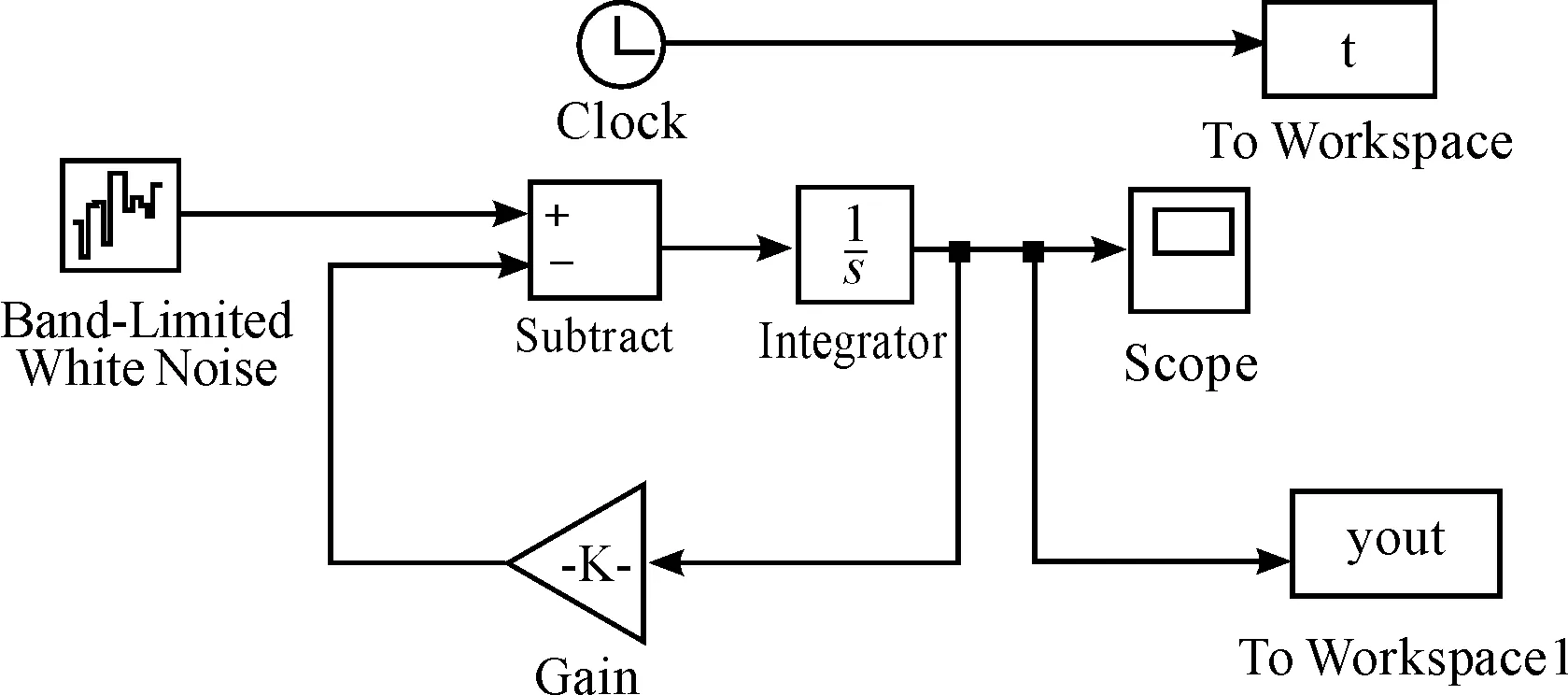
图8 路面激励时域信号模型
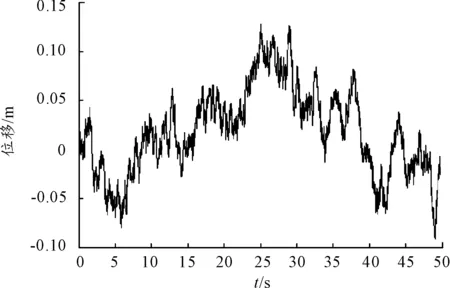
图9 模拟 D 级路面激励时域信号
4 仿真分析
为比较采用模糊PID控制后空气弹簧的减振性,本文首先在动力学软件ADAMS中对机场消防车进行动力学仿真,得到消防车在D级路面行驶时各轴向加速度及振动位移量。根据人体振动舒适性评价标准,在Matlab中编写计算机程序,得到空气弹簧被动控制时的振动加速度和位移量。
对于联合仿真,去掉模糊PID控制部分中的PID调节器,输入输出变量的论域不变,可得到采用模糊控制后的本文采用的座椅减振性,联合仿真步长为0.001 s,仿真时间为20 s,通过联合仿真,得到机场消防车空气弹簧座椅在被动控制、模糊控制、模糊PID控制下,座椅在垂直方向上的位移和振动加速度变化曲线,如图10~11所示。
当给虚拟样机ADAMS模型一个D级路面激励时,从图10可以看出:机场消防车车身底板最大加速度在3 m/s2左右,经过螺旋弹簧座椅悬架衰减后,传至人体的最大加速度减小为0.85 m/s2。当采用模糊PID控制的空气弹簧悬架座椅后,最大加速度进一步衰减为0.45 m/s2。从图11可以看出:机场消防车在D级路面行驶时,车身底板产生的最大振动位移为0.014 m,经螺旋弹簧座椅减振后,最大振动位移减为0.011 m,而有模糊PID控制的空气弹簧座椅的最大振动位移仅为 0.005 3 m。采用模糊PID控制后的空气弹簧座椅悬架,在行驶过程中,可根据不同的路面工况控制节流阀门的开度,从而改变座椅的刚度,为衰减振动提供最有利的座椅刚度参数,保证驾驶员的驾驶舒适性。同时满足了人体对座椅的基本要求,即在良好路面作业时,为提高舒适性,要求座椅悬架尽量软;在粗糙的坏路面行驶时,则要求座椅悬架尽可能较硬。
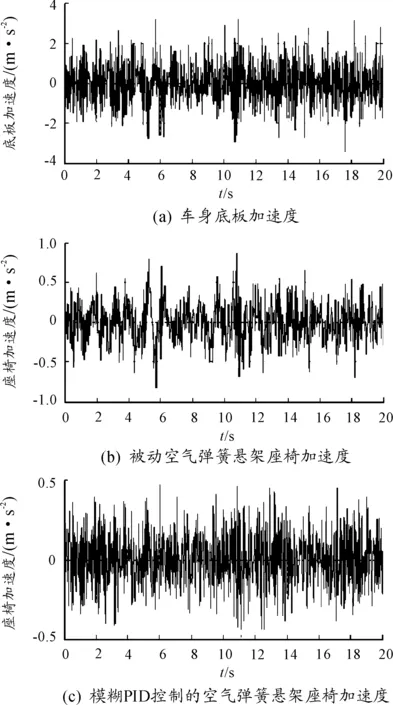
图10 座椅垂直振动加速度曲线
根据人体振动评价方法计算可得螺旋弹簧座椅加权加速度均方根值为0.822 m/s2,空气弹簧座椅经模糊PID控制后振动加权加速度均方根值为0.324 m/s2,可见采用模糊PID控制的空气弹簧座椅有更优异的减振性能,机场消防车驾驶员的乘坐舒适性也能得到进一步改善。
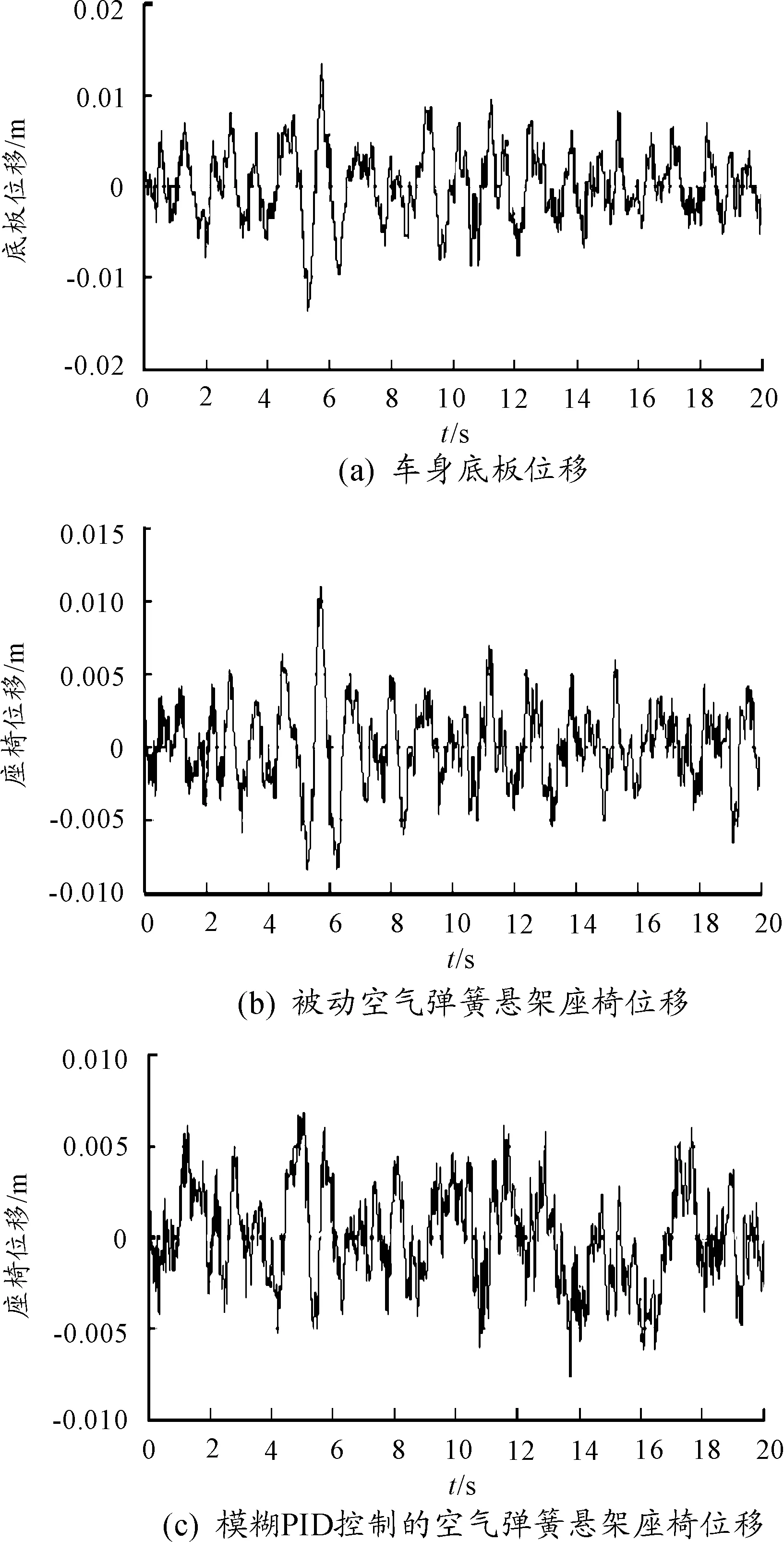
图11 座椅垂直位移响应曲线
5 结束语
机场消防车在到达灭火作业区域过程中,车辆由于发动机和路面产生的振动会经轮胎、悬架、座椅传递给驾驶员。采用模糊PID控制后的空气弹簧座椅,可以有效地衰减车辆行驶过程中的振动,其产生的最大加速度为0.324 m/s2,在人体舒适性范围之内,可以减轻驾驶员的劳动强度,确保驾驶员用更多的精力和时间关注作业操作,提高工作效率。
[1] 邹晓华.汽车悬架系统参数匹配及减震器主动设计方法[D].锦州:辽宁工学院,2012.
[2] 聂发勇.辅助气室空气悬架座椅振动仿真研究[D].镇江:江苏大学,2012.
[3] 诸静.模糊控制原理与应用[M].北京:机械工业出版社,2003.
[4] 曙光,魏俊民,竺志超.模糊控制技术[M].北京:中国纺织出版社,2001(6):63-90.
[5] 吴宏鑫,沈少萍.PID控制的应用与理论依据[J].控制工程,2013,4(10):56-65.
[6] 王晓莲.基于ADAMS和MATLAB的汽车主动悬架联合仿真研究[D].南京:南京航空航天大学,2009.
[7] 阚萍.客车空气弹簧悬架的初步研究[D].合肥:合肥工业大学,2014.
[8] 徐延海.随机路面谱的计算机模拟[J].农业机械学报,2007(1):18-20.
(责任编辑林 芳)
ResearchontheAirSpringVibrationCharacteristicBasedontheFuzzyPIDControl
YAN Xinpeng1, WANG Jiong2
(1.China Yto Group Corporation, Luoyang 471003, China;2.School of Automobile and Traffic Engineering, Jiangsu University, Zhenjiang 212013, China)
2016-05-18
颜新鹏(1988—),男,助理工程师,主要从事噪声与振动研究;王炯(1988—),男,硕士研究生,主要从事噪声与振动研究,E-mail: wangjiong198861@126.com。
颜新鹏,王炯.基于模糊PID控制的空气弹簧振动特性研究[J].重庆理工大学学报(自然科学),2017(9):63-67.
formatYAN Xinpeng,WANG Jiong.Research on the Air Spring Vibration Characteristic Based on the Fuzzy PID Control[J].Journal of Chongqing University of Technology(Natural Science),2017(9):63-67.
10.3969/j.issn.1674-8425(z).2017.09.010
TH13
A
1674-8425(2017)09-0063-05
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
模具制造(2022年1期)2022-02-23
中学生数理化(高中版.高考理化)(2021年1期)2021-03-19
新高考·高一物理(2016年10期)2017-07-07
北京汽车(2016年6期)2016-10-13
故事作文·低年级(2016年7期)2016-05-14
工业设计(2016年5期)2016-05-04
现代制造技术与装备(2015年4期)2015-12-23
汽车维护与修理(2015年7期)2015-02-28
汽车维护与修理(2014年10期)2014-02-28
